PERANCANGAN SISTEM PENGENDALIAN LEVEL DAN INTERLOCK STEAM DRUM DENGAN
DUA ELEMEN KONTROL DI PT. INDONESIA POWER UBP SUB UNIT PERAK
( Wahid Abdurrahman , Hendra Cordova ST,MT , Dyah sawitri ST, MT) Jurusan Teknik Fisika FTI ITS Surabaya
Kampus ITS Keputih Sukolilo Surabaya 60111 Telp : +6231-5947188 Fax : +6231-5923626
E-mail : [email protected]
Abstrak
Pada dasarnya proses pembangkitan listrik terdiri dari beberapa bagian antara lain proses pada
desalination
(penyaringan air laut menjadi air tawar), boiler, turbin, pembangkitan listrik di generator,dll. Salah
satu yang paling utama dan penting adalah proses pada steam drum. Pada Steam drum apabila level terlalu
rendah akan timbul kerusakan pada steam drum dan apabila level terlalu tinggi maka akan berbahaya karena
akan membuat sistem yang bekerja menjadi shutdown/trip.Maka dari itu diperlukan suatu sistem pengendalian
untuk menjaga level dari steam drum tersebut,salah satunya dengan sistem pengendalian level mode kontrol
dengan dua elemen kontrol.Pada penelitian ini,penentuan parameter kontrol PID yang dilakukan adalah dengan
Ziegler-Nichols
.Dari hasil pengujian dan analisa sistem pengendalian level dan interlock.Dengan menggunakan
metode ziegler-nichols diperoleh nilai Kp:21,72,Ti:1,105,danTd:0,27625.kemudian didapatkan bahwa respon
sistem pengendalian level dan interlock stabil dengan settling time :147 s,maksimum overshootnya yaitu
sebesar :28,6%, rise time ( Tr ) :10 s, Peak time (Tp) :45 s,dan delay time : 27 s.
Kata Kunci : Steam Drum, Level, Ziegler-Nichols
1. PendahuluanProses pembangkitan listrik terdiri dari
beberapa bagian antara lain proses pada
desalination
(penyaringan air laut menjadi air
tawar), boiler, turbin, pembangkitan listrik di
generator,dll. Salah satu yang paling utama dan
penting adalah proses pada steam drum. Steam
drum
sendiri adalah suatu alat pada boiler yang
berfungsi untuk menampung air dalam pembuatan
uap, dimana temperaturnya cukup tinggi dan berupa
campuran air serta uap. Air yang masuk pada steam
drum
akan berubah menjadi uap akibat adanya
pemanasan oleh sistem pembakaran. Kualitas uap
salah satunya dipengaruhi oleh level dari air yang
ada di dalam steam drum. Apabila level terlalu
rendah akan timbul kerusakan pada steam drum dan
apabila level terlalu tinggi maka akan berbahaya
karena akan membuat sistem yang bekerja menjadi
shutdown.
Maka dari itu diperlukan suatu
pengendalian level yang dapat menjaga kondisi
yang diinginkan agar tetap stabil terhadap
perubahan level yang terjadi pada steam drum.
Permasalahan yang timbul pada tugas akhir ini adalah bagaimana merancang sistem pengendalian level dan interlock steam drum dengan dua elemen control di PT INDONESIA POWER UBP SUB UNIT PERAK.
Tujuan yang ingin dicapai dari tugas akhir ini adalah Merancang sistem pengendalian level dan interlock steam drum dengan dua elemen control di PT INDONESIA POWER UBP SUB UNIT PERAK.
Batasan permasalahan yang diperlukan dalam tugas akhir ini adalah sebagai berikut :
Sifat sifat ( properties ) masing- masing
fluida adalah konstan.
Model proses yang digunakan didekati dengan persamaan matematika linier . Variable yang dikontrol adalah level dari
steam drum boiler.
Sistem pengendalian level dan interlock
steam drum menggunakan dua elemen
kontrol yaitu laju massa uap dan level steam drum.
2. Teori Penunjang 2.1 Steam drum
Steam drum adalah suatu alat pada boiler yang
berfungsi untuk menampung air dalam pembuatan uap, dimana temperaturnya cukup tinggi dan berupa campuran air serta uap.
Tujuan dari
drum level control
adalah menjagaagar level drum (tinggi permukaan air dalam drum) tetap pada setpoint-nya walaupun terjadi perubahan beban ataupun gangguan/disturbance lainnya. Level drum yang terlalu rendah bisa menyebabkan terjadinya panas berlebih (overheated) pada boiler tubes sehingga tubes bisa menjadi rusak/bengkok/bocor. Sebaliknya level
P I D + ++ +- E(s) R(s) FeedBack m(s)
drum yang terlalu tinggi akan menyebabkan pemisahan air dan steam dalam drum tidak sempurna sehingga kualitas steam yang dihasilkan kurang (banyak mengandung air/basah).Ada tiga alternative/jenis
drum
level control
, yaitu: 1)Single element drum level
control
; 2)Two-element drum level control
; 3)Three-element drum level control
.2.2 Algoritma Controller PID
Controller PID merupakan algoritma control
konvensional yang banyak digunakan dalam berbagai unit pengendalian proses karena mempunyai struktur yang relatif sederhana dan performansi yang baik pada daerah operasi yang luas.
Controller PID merupakan kombinasi dari 3
pengendali yaitu : Pengendali Proportional, Pengendali
Integral dan Pengendali Derivative yang disusun secara
paralel sebagaimana ditunjukkan pada gambar 3. Ketiga jenis pengendali ini memberikan respon yang berbeda – beda pada proses orde satu, proses orde dua dan proses orde banyak. Ketiga jenis pengendali ini masing – masing mempunyai kelebihan dan kekurangan. Pengendali Proportional masih meninggalkan offset, hal ini disebabkan oleh sifat dasar pengendali proportional yang masih tetap membentuk error untuk menghasilkan
output. Oleh karena itu untuk menghilangkan offset
diperlukan pengendali lain yang dapat menghasilkan
output walaupun sudah tidak ada lagi input. Sifat unik
inilah yang hanya dimiliki oleh pengendali integral, tetapi kemampuan pengendali integral menghilangkan
offset tidak disertai dengan kemampuan bereaksi secara
cepat, kelemahan ini semakin nyata kalau pengendali tersebut digunakan untuk elemen proses temperatur. Untuk mempercepat kemampuan bereaksi maka diperlukan pengendali derivative, sehingga kekurangan yang ada pada pengendali integral dapat ditutupi. Jadi ketiga mode pengendali Proportional, Integral dan
Derivative masing – masing berguna untuk mempercepat
reaksi sistem, menghilangkan offset dan mendapatkan energi ekstra di saat – saat awal perubahan load.
Gambar 1 Diagram blok controller PID 2.3 Sistem Pengendalian Level pada Steam Drum
Variabel dinamik yang harus dicontrol pada Boiler
Steam Drum agar proses pemisahan dapat berlangsung
secara optimal adalah level fluida cair di dalam Steam
Drum. Level fluida yang terlalu tinggi akan
menyebabkan fluida gas (steam) yang dihasilkan akan mengandung uap air sehingga akan membahayakan proses berikutnya disamping itu juga akan menyebabkan
kerusakan pada pipa – pipa yang ada di dalam boiler. Sebaliknya bila level fluida terlalu rendah maka akan menghasilkan fluida gas (steam) yang terlalu kering sehingga steam yang dihasilkan tidak akan mampu memutar turbin secara maksimal.
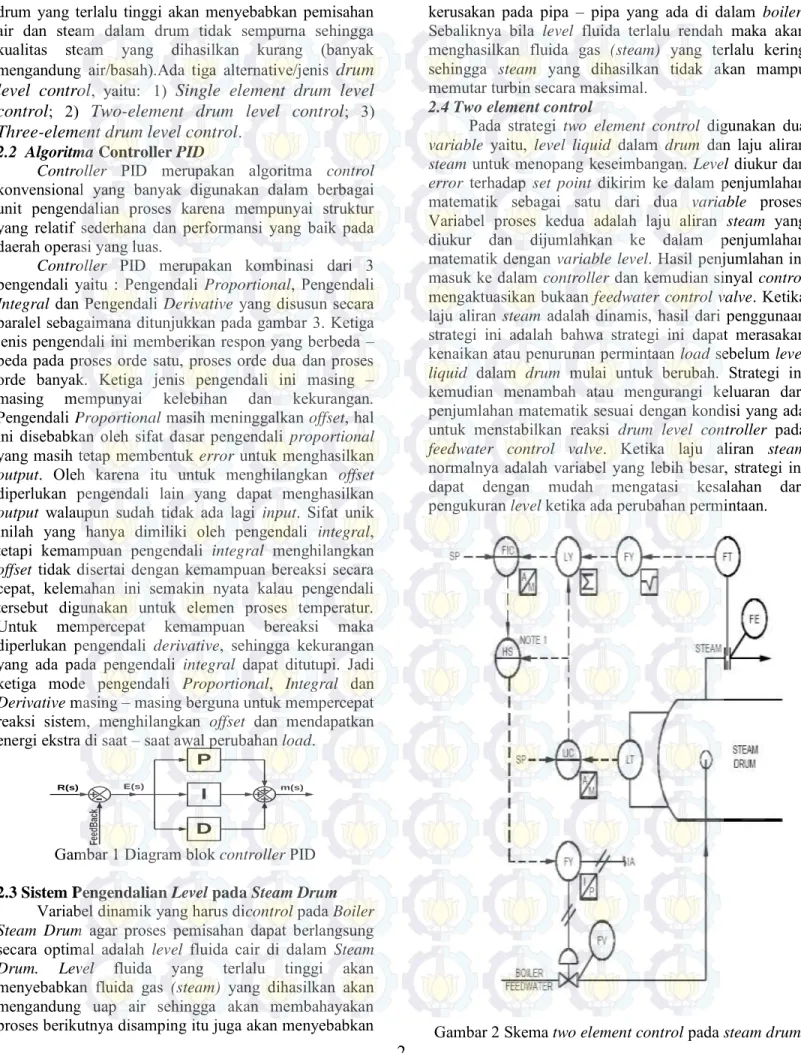
2.4 Two element control
Pada strategi two element control digunakan dua
variable yaitu, level liquid dalam drum dan laju aliran
steam untuk menopang keseimbangan. Level diukur dan
error terhadap set point dikirim ke dalam penjumlahan
matematik sebagai satu dari dua variable proses. Variabel proses kedua adalah laju aliran steam yang diukur dan dijumlahkan ke dalam penjumlahan matematik dengan variable level. Hasil penjumlahan ini masuk ke dalam controller dan kemudian sinyal control mengaktuasikan bukaan feedwater control valve. Ketika laju aliran steam adalah dinamis, hasil dari penggunaan strategi ini adalah bahwa strategi ini dapat merasakan kenaikan atau penurunan permintaan load sebelum level
liquid dalam drum mulai untuk berubah. Strategi ini
kemudian menambah atau mengurangi keluaran dari penjumlahan matematik sesuai dengan kondisi yang ada untuk menstabilkan reaksi drum level controller pada
feedwater control valve. Ketika laju aliran steam
normalnya adalah variabel yang lebih besar, strategi ini dapat dengan mudah mengatasi kesalahan dari pengukuran level ketika ada perubahan permintaan.
3. Metodologi Penelitian
Adapun tahapan - tahapan dalam menyelesaikan penelitian ini adalah sebagai berikut:
Gambar 3 Metodologi Penelitian 3.1 Pengambilan data Plant dari Steam drum
Pada pengambilan data plant Steam drum didapatkan data berdasarkan karakteristik dari plant tersebut. Pada input Steam terdapat dua input yaitu Q1 laju air (water) dan Q2 adalah laju steam yang keluar dari steam drum. Pada output steam drum terdapat satu output yaitu yang berupa ketinggian level pada steam drum.Kemudian data spesifikasi dari steam drum seperti Panjang,diameter dan Volume dari steam drum.Data-data ini nantinya akan dipergunakan sebagai acuan untuk melakukan pemodelan dan merancang simulasi dari pengendalian level dan interlock Steam drum. 3.2 Diagram Blok Sistem
Diagram blok sistem untuk pengendalian level air pada Steam drum dapat ditunjukkan pada gambar seperti dibawah ini:
Gambar 4 Diagram blok sistem pengendalian level Steam Drum
3.3 Pemodelan Matematis Level Steam Drum
Pada dasarnya pengendalian level air pada steam
drum harus dijaga konstan pada ketinggian tertentu. Bila
ketinggian level air pada steam drum terlalu rendah (Low
Water) atau terlalu tinggi (High Water), maka sistem
akan mengalami kondisi trip, yaitu suatu kondisi yang memerlukan penghentian beroperasi sampai kondisi dari
level di steam drum bisa terjaga konstan mendekati set
point. Biasanya pada kondisi ini membutuhkan restart
ulang agar sistem bisa berjalan secara normal. Kondisi
high water sendiri sangat berbahaya bagi proses
selanjutnya, dimana masukan dari turbin yang berupa
steam akan bercampur dengan air yang berasal dari
steam drum yang berada dalam kondisi high water.
Sehingga akan mengakibatkan korosi dan bahkan kerusakan pada steam turbin. Sedangkan kondisi low
water juga sangat berbahaya bagi steam drum sendiri,
karena dalam kondisi kekurangan air steam drum akan mempunyai pressure yang lebih kecil dari pada pressure normalnya.
Dibawah ini adalah gambar dari pengendalian
level pada steam drum :
Gambar 5 Sistem pengendalian level pada steam drum Dimana : q1 : Flow Air masuk (Kg/s)
q2 : Flow Steam Keluar (Kg/s) h(t) : Ketinggian air (meter) LT : Level Transmiter LC : Level Controller FC : Flow Controller FT : Flow Steam transmitter
Pemodelan matematis dari system pengendalian level adalah sebagai berikut :
)
(
)
(
)
(
2 1t
q
t
q
dt
t
dm
v w ( 3.1 )Dimana : dm : perubahan massa air (m3) dt : perubahan waktu (sekon) ρw : massa jenis air (kg/m3) ρv : massa jenis uap air (kg/m3) q1 : Flow Air masuk (Kg/s) q2 : Flow Steam Keluar (Kg/s)
Jika
m
V
w dandV
wLdA
maka persamaan (3.1) akan menjadi :)
(
)
(
)
(
2 1t
q
t
q
dt
t
LdA
v w w(3.2)
Dimana : A : luasan steam drum (m2) L :perubahan ketinggian permukaan air (m)
Untuk luasan dinding samping Steamdrum, maka digunakan hubungan pendekatan antara luas berdasaran lingkaran dengan bentuk persegi dan dari hasil perhitungan diperoleh : dA = 0.82 Ddh.
)
(
)
(
82
.
0
q
1t
q
2t
dt
dh
LD
w v w (3.3)Sedangkan persamaan untuk aliran air yang masuk melalui control valve adalah sebagai berikut :
G v
S
t
P
t
f
C
t
q
1(
)
(
)
(
)
(3.4)
Dimana :q1(t) : laju aliran air yang masuk melalui
control valve (m3/s)
Cv : koefisien control valve
P : pressure drop yang melalui control
valve
SG : spesific gravity fluida
Sedangkan pressure drop pada control valve diperoleh dengan persamaan :
2
1
gh
P
P
P
w (3.5)Dimana :P1 : pressure dalam HP drum (kg/m2) P2 : pressure sebelum melewati control
valve(kg/m2)
w : massa jenis air (kg/m3) g : percepatan gravitasi (m/s2)
h : tinggi permukaan air dalam drum (m) Jika persamaan (3.5) disubsitusikan ke dalam persamaan (3.4) maka diperoleh :
G w v
S
P
t
gh
t
P
t
f
C
t
q
1(
)
(
)
1(
)
(
)
2 (3.6)Persamaan (3.6) disubstitusikan ke dalam persamaan (3.3), maka akan menghasilkan persamaan sebagai berikut :
)
(
)
(
)
(
)
(
82
.0
1 2q
2t
S
P
t
gh
t
P
t
f
C
dt
dA
LD
v G w v w w(3.7)
Agar dapat menyelesaikan persamaan (3.7) maka persamaan (3.7) harus dilenearisasi terlebih dahulu dengan menggunakan persamaan deret Taylor, dimana komponen yang tidak linear akan dilinerisasikan terhadap f dan p pada kondisi tunak (steady
state).Adapun persamaan deret Taylor adalah sebagai
berikut :
)
(
)
(
__2 2 __ 1 1 __x
x
x
f
x
x
x
f
y
y
ss ssDengan persamaan diatas maka persamaan (3.6) dapat disusun sebagai berikut :
)
(
)
(
__ ) , ( 1 __ ) , ( 1 __ 1 1p
p
p
q
f
f
f
q
q
q
p f p f (3.8) Dimana q1 adalah fungsi non linear dari variabel fungsi non linear dari variabel proses f (flow yang melalui control valve) dan p (perbedaan pressure antara drum dan control valve) atau dapat ditulis sebagai q (f, p) sehingga bila diturunkan terhadap f dan p menjadi sebagai berikut :)
(
)2
1
(
2
)
(
1
1
P
wgh
P
/12p
p
SG
f
Cv
f
f
SG
p
Cv
q
q
(3.9
Dimana :
p
: kondisi tunak dari pf
: kondisi tunak darif
Dalam kondisi tunak tidak terjadi perubahan massa
sehingga
0
dt
dm
, maka persamaan kesetimbangan menjadi :
)
(
)
(
0
wq
1t
vq
2t
)
(
)
(
2 1t
q
t
q
v w (3.10) Dengan memisalkan : GS
p
Cv
K
1
2 1 12
S
P
gh
P
f
C
K
w G v)
(
1 1 1q
q
Q
P
(
p
p
)
2 1P
P
P
Bila persamaan (3.9) disubsitusikan ke persamaan (3.7) menjadi : 2 1
)
(
82
.
0
K
Q
Q
dt
dh
LD
w v w (3.11) 2 1)
(
82
.
0
K
Q
Q
dt
dh
LD
w v (3.12) 2 182
.
0
K
Q
Q
dt
dh
LD
w v (3.13)Apabila disederhanakan persamaan (3.13) menjadi : 2 2 1 1
Q
A
Q
A
H
dt
dH
(3.14) Dimana :g
K
LD
w 282
.
0
g
K
K
A
w 2 1 1g
K
A
w w v 2 2Hasil akhir dari pemodelan sistem pengendalian level adalah :
(
)
1
)
(
1
)
(
1 1 2Q
2s
s
A
s
Q
s
A
s
H
(3.15)Pemodelan pressure steam drum
)
(
)
(
)
(
2 1t
q
t
q
dt
t
dP
C
w v(3.16)
Dimana : C : kapasitansi tangki
dP : perubahan pressure steam (bar) dt : perubahan waktu (sekon) q1 : flow air masuk (Kg/s) q2 : flow uap air keluar (Kg/s) ρw : massa jenis air (kg/m3) ρv : massa jenis uap air (kg/m3) Dimana massa jenis uap air adalah :
RT
MP
v (3.17)
Persamaan (3.17) disubtitusikan ke dalam persamaan (3.16) maka didapatkan hasil sebagai berikut :
)
(
)
(
)
(
2 1q
t
RT
MP
t
q
dt
t
dP
C
w(3.18)
Untuk dapat menyelesaikan persamaan (3.18) maka harus dilinierisasikan sehingga didapat persamaan berikut :
))
(
)
(
(
)
(
)
(
2 2 1P
q
t
q
P
t
RT
M
t
q
dt
t
dP
C
w (3.19) misal :RT
M
K
, maka :)
(
)
(
)
(
)
(
2 1 2P
t
q
t
K
P
q
t
q
K
dt
t
dP
C
w (3.20)Maka jika persamaan (3.20) ditransformasi Laplace akan didapat :
)
(
)
(
)
(
)
(
s
k
Q
2P
s
Q
1s
K
P
Q
2s
CsP
w (3.21Sehingga persamaan model matematis untuk pressure adalah sebagai berikut :
)
(
)
(
)
(
2 2 1 2s
Q
Q
k
Cs
P
K
s
Q
Q
k
Cs
s
P
w (3.22)3.4 Sensor dan transmitter level
Jenis transmitter yang digunakan adalah
differential pressure transmitter. Transmitter ini bekerja
dalam range 0-220 mm (0,7 meter) dan keluarannya adalah sinyal listrik dengan range 4-20 mA,dan dari hasil kalibrasi,Transmitter ini memiliki time konstan sebesar 0,2 detik. Gain dari transmitter ini adalah :
) ( ) ( meter masukan Span mA keluaran Span GL (3.23) Dengan memasukkan data dari transmitter level maka didapat : meter mA meter mA GL (0,7) 22,85 ) 4 20 ( (3.24)
Sedangkan untuk mendapatkan fungsi transfer dari transmitter level ini digunakan persamaan :
1 ) ( ) ( ) ( s T G s I s L c L L L (3.25) dimana : GL : gain transmitter
Tc : time constant transmitter
Time constant dari transmitter adalah 0,2 detik, maka
fungsi transfer transmitter level adalah : 1 2 . 0 85 , 22 ) ( ) ( s s I s L L L (3.26)
3.5 Flow Steam transmitter
Jenis sensor yang digunakan untuk mengukur laju massa uap yang keluar dari steam drum PLTU PT. Indonesia Power sub unit Perak adalah differential
transmitter. Jenis ini memanfaatkan perbedaan tekanan
untuk menghitung laju massa uap keluaran dari steam
drum. Range pengukuran yang mampu dilakukan adalah
0 – 800 ton/jam (222,22 kg/detik) sedangkan keluarannya berupa arus sebesar 4-20 mA. Data ini diambil dari hasil kalibrasi. Transmitter . Time konstan yang di peroleh dari hasil kalibrasi adalah sebesar 0,2 detik.
Nilai gain transmitter :
det / 072 , 0 22 , 222 4 20 kg mA GV (3.27) sehingga pemodelannya : 1 2 , 0 072 , 0 ) ( ) ( s s L s I (3.28)
3.6 Elemen Pengendali Akhir
Elemen pengendali akhir merupakan bagian akhir sistem pengendalian yang berfungsi mengubah variabel yang dimanipulasi sehingga diperoleh kondisi yang dikehendaki. Ada bermacam-macam elemen pengendali akhir, dalam plant ini elemen pengendali akhir berupa control valve.Adapun yang harus diketahui dalam menentukan control valve adalah :
Karakteristik control valve Gain control valve
Rangeability Fungsi transfer
Fungsi tranfer dari control valve dapat dinyatakan dalam orde satu sebagai berikut :
1
s
T
K
G
cv CV cv (3.29)dimana :Kcv : gain control valve
Tcv : time constant control valve
masukan
tekanan
perubahan
maksimum
aliran
laju
K
CV (3.30)Dari penelitian di lapangan diperoleh data sebagai berikut :
Aliran maksimum : 182 t/h (50.55 kg/s) Aliran minimum : 46 t/h (34.16 kg/s) Sehingga
s
m
m
kg
s
kg
K
CV5
.
46
/
/
)
0
3
(
/
)
16
.
34
55
.
50
(
2 2 (3.31)Gain transduser (I/P) diperoleh dengan persamaan :
) ( ) / ( 2 mA input Span m kg output Span GT (3.32) ) /( 1875 . 0 ) 4 20 ( / ) 0 3 ( 2 kg m2mA mA m kg GT (3.33)
Maka Gain total dari control valve diperoleh dengan persamaan : CV T V G K K . s cm mA cm kg KV 2 2. 5.46 1875 . 0 mA s kg KV . 024 . 1 (3.34)
Konstanta waktu dari control valve diperoleh berdasarkan waktu stroke, perubahan fraksional terhadap bukaan valve dan perbandingan konstanta waktu pada
stroking time valve yang mempunyai hubungan sebagai
berikut :
)
(
V
R
T
T
CV V (3.35) Dimana :TCV : konstanta waktu (time constant) control valve. TV : time stroke skala penuh (8 detik untuk level dan 6
detik untuk pressure).
V : fraksi perubahan posisi control valve.
R : Perbandingan konstanta pada stroking time valve (untuk diafragma adalah 0,03 dan untuk piston adalah 0,3).
Dari persamaan diatas dan dengan memasukkan data plant yang ada, maka didapat time constant control valve sebesar 11.13 detik untuk sistem pengendalian level .Maka dengan memasukkan data-data diatas didapat fungsi transfer dari control valve :
Untuk sistem pengendalian level
1
13
.
11
024
.
1
s
G
CV (3.36)4. Pengujian dan analisa hasil simulasi 4.1 Simulasi Open Loop Proses
Uji open loop proses ini dilakukan untuk mengetahui karakteristik proses pada kondisi loop terbuka,berikut adalah simulasi open loop Control valve,
Grafik 1 Respon open loop control valve dengan Sinyal 4 mA
Grafik 2 Respon open loop control valve dengan Sinyal 20 mA.
4.2 Simulasi Open loop hubungan Level dalam Steam drum
Dari gambar simulasi open loop diatas dapat dinyatakan bahwa ketika level dari steam drum mengalami kenaikan,maka pressure dalam steam drum juga mengalami kenaikan . Begitu juga apabila level dalam steam drum mengalami penurunan ,maka pressure dalam steam drum mengalami penurunan .berikut adalah hasil respon uji open loop hubungan level dan pressure di dalam steam drum :
Grafik 3 Respon level pada uji Open loop hubungan Level dan Pressure dalam Steam drum
Grafik 4 Respon pressure pada uji Open loop hubungan Level dan Pressure dalam Steam drum
4.3 Tuning Nilai Kp,Ti dan Td
Metode ziegler-nichols.
Nilai kestabilan sistem menggunakan
metode routh hourwitz. Didapatkan nilai KP kritis
sistem (Kcr) adalah 36,2. Periode (Pcr) adalah 2,21
detik. Setelah itu, berdasarkan tabel 2.1 maka
diperoleh nilai parameter PID metode
ziegler-nichols sebagai berikut:
Kp = 0,6.(36,2)=21,72 Ti = (2,21).0,5=1,105 Td = (2,21).0,125=0,27625
4.4 Respon sistem pengendalian level dan interlock steam drum
Diberikan masukan berupa sinyal step dengan
set point sebesar 0,7 meter , dan 0,9 meter . Set point ini
merupakan set point yang sesuai dengan kondisi operasi normal yang ada di lapangan.
Gambar 5 Desain sistem pengendalian level dan
interlock steam drum
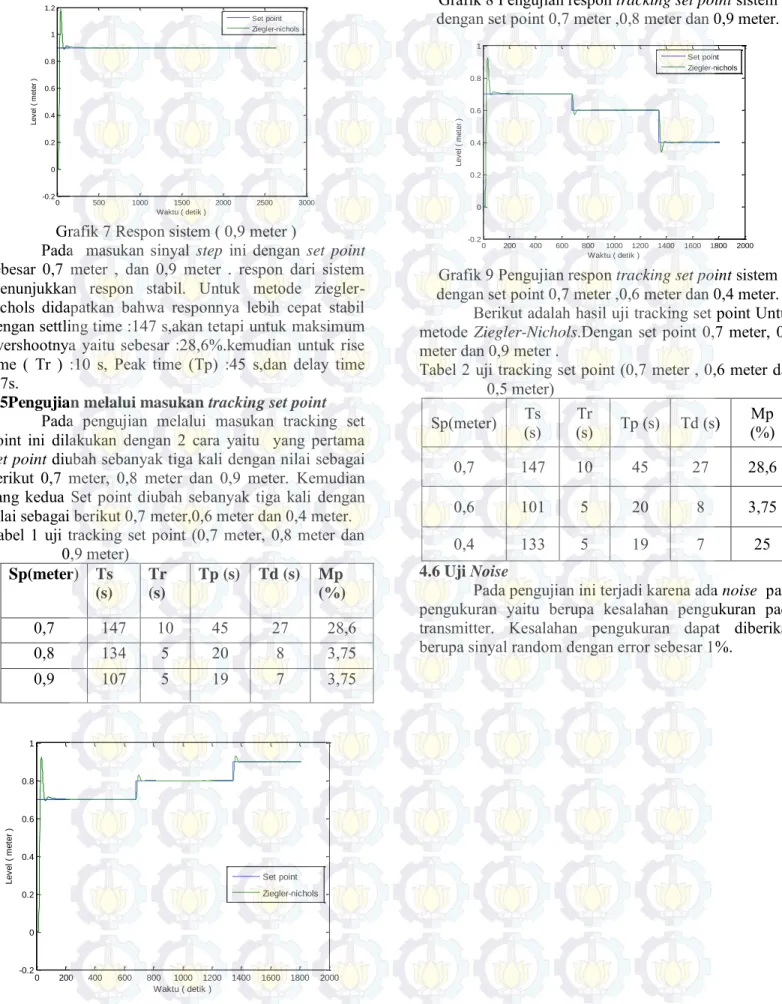
0 500 1000 1500 2000 2500 3000 -0.2 0 0.2 0.4 0.6 0.8 1 Waktu ( detik ) L e v e l ( m e te r ) Set point Ziegler-nichols
0 500 1000 1500 2000 2500 3000 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 Waktu ( detik ) L e v e l ( m e te r ) Set point Ziegler-nichols
Grafik 7 Respon sistem ( 0,9 meter )
Pada masukan sinyal step ini dengan set point sebesar 0,7 meter , dan 0,9 meter . respon dari sistem menunjukkan respon stabil. Untuk metode ziegler-nichols didapatkan bahwa responnya lebih cepat stabil dengan settling time :147 s,akan tetapi untuk maksimum overshootnya yaitu sebesar :28,6%.kemudian untuk rise time ( Tr ) :10 s, Peak time (Tp) :45 s,dan delay time :27s.
4.5Pengujian melalui masukan tracking set point Pada pengujian melalui masukan tracking set point ini dilakukan dengan 2 cara yaitu yang pertama
Set point diubah sebanyak tiga kali dengan nilai sebagai
berikut 0,7 meter, 0,8 meter dan 0,9 meter. Kemudian yang kedua Set point diubah sebanyak tiga kali dengan nilai sebagai berikut 0,7 meter,0,6 meter dan 0,4 meter. Tabel 1 uji tracking set point (0,7 meter, 0,8 meter dan
0,9 meter) Sp(meter) Ts (s) Tr (s) Tp (s) Td (s) Mp (%) 0,7 147 10 45 27 28,6 0,8 134 5 20 8 3,75 0,9 107 5 19 7 3,75 0 200 400 600 800 1000 1200 1400 1600 1800 2000 -0.2 0 0.2 0.4 0.6 0.8 1 Waktu ( detik ) L e v e l ( m e te r ) Set point Ziegler-nichols
Grafik 8 Pengujian respon tracking set point sistem dengan set point 0,7 meter ,0,8 meter dan 0,9 meter.
0 200 400 600 800 1000 1200 1400 1600 1800 2000 -0.2 0 0.2 0.4 0.6 0.8 1 Waktu ( detik ) L e v e l ( m e te r ) Set point Ziegler-nichols
Grafik 9 Pengujian respon tracking set point sistem dengan set point 0,7 meter ,0,6 meter dan 0,4 meter.
Berikut adalah hasil uji tracking set point Untuk metode Ziegler-Nichols.Dengan set point 0,7 meter, 0,8 meter dan 0,9 meter .
Tabel 2 uji tracking set point (0,7 meter , 0,6 meter dan 0,5 meter) Sp(meter) Ts (s) (s) Tr Tp (s) Td (s) (%) Mp 0,7 147 10 45 27 28,6 0,6 101 5 20 8 3,75 0,4 133 5 19 7 25 4.6 Uji Noise
Pada pengujian ini terjadi karena ada noise pada pengukuran yaitu berupa kesalahan pengukuran pada transmitter. Kesalahan pengukuran dapat diberikan berupa sinyal random dengan error sebesar 1%.
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 Waktu ( detik ) L e v e l ( m e te r ) Set point Ziegler-nichols
Grafik 4.10 Respon uji Noise sistem Dari hasil uji noise pada metode Ziegler-nichols didapatkan bahwa sistem memiliki error steady state 5%. 4.7 Pengujian interlock Sistem
Pada sub bab sebelumnya sudah diketahui respon sistem hasil desain. Untuk melengkapi informasi sistem hasil desain maka pada sub bab ini akan dilakukan pengujian terhadap interlock sistem tersebut.yaitu dengan cara memberikan gangguan terhadap level steam drum,dengan memperbesar laju aliran air yang masuk ke dalam steam drum sehingga melebihi dari set point sistem interlock.Berikut di bawah ini adalah hasil respon dari pengujian sistem interlock.
0 100 200 300 400 500 600 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 Waktu ( detik ) L e v e l ( m e te r ) Set point Ziegler-nichols
Grafik 4.11 Respon sistem interlock 5. Kesimpulan
Dari hasil simulasi dan analisa data pada penelitian Tugas Akhir ini, dapat disimpulkan sebagai berikut :
Telah dilakukan perancangan sistem pengendalian level dan interlock steam drum dengan dua elemen kontrol di PT. Indonesia Power Unit Bisnis Pembangkitan perak.
Semakin tinggi level dari Steam drum maka semakin tinggi pula tekanan yang terdapat di dalam Steam drum.
Sistem interlock akan berjalan ketika ketinggian ( level ) air di dalam steam drum naik melebihi set point dari sistem interlock yaitu 1,3 meter. Pada metode ziegler-nichols dengan nilai Kp:21,72,Ti:1,105,danTd:0,27625 didapatkan bahwa respon sistem stabil dengan settling time :147 s,maksimum overshootnya yaitu sebesar :28,6%, rise time ( Tr ) :10 s, Peak time (Tp) :45 s,dan delay time : 27 s.
DAFTAR PUSTAKA
[1]Gunterus, Frans. 1994. Falsafah Dasar Sistem Pengendalian Proses, Elex Media Komputindo, Jakarta.
[2]Incropera, Frank P. 1996. Fundamentals of Heat and Mass Transfer: Fourth Edition, John Willy & Sons, Inc,USA.
[3]
Marlin,
T.E.
1995
ProcessControl;
DesignProcess and Control System for Dynamic
Performance.
New York : McGraw-Hill Company.
[4] Ogata, Katshuiko, “Teknik Kontrol Automatik
I
’’, Prentice Hall Inc, 1996.
[5] Ogata, Katshuiko, “Teknik Kontrol Automatik
II
’’, Prentice Hall Inc, 1996.
[6] Muamar, Awal. 2009.Perancangan sistem control level dan pressure pada boiler di workshop instrumentasi berbasis DCS CENTUM CS3000 YOKOGAWA : ITS