BAB II
TINJAUAN TEORITIS
1.1 Tinjauan Pustaka1) Proyek Akhir Dikdik Gantara dari angkatan 2006 Politeknik Negeri Bandung dengan judul “Realisasi Modulator Pemancar TV VHF dengan Metoda PLL pada Kanal 12” [5].
G ambar 1
Hasil kajian proyek akhir dengan judul “ Realisasi Modulator Pemancar TV VHF dengan Metoda PLL pada Kanal 12” adalah sebagai bertikut:
1. Metode PLL diaplikasikan pada TV Modulator untuk bagian sinyal carrier audio.
2. Pengaturan frekuensi menggunakan DIP Switch.
3. TV Transmitter bekerja pada band frekuensi 204 MHz – 211 MHz.
Pada proyek akhir ini direalisasikan sebuah osilator PLL Synthesizer yang diaplikasikan terhadap TV Modulator dimana osilator ini berfungsi dalam proses translasi frekuensi TV Modulator pada Vision Carrier. Juga direalisasikan bagian kontrol digital untuk menggantikan peran DIP Switch, sehingga memudahkan dalam perpindahan kanal frekuensi TV Trasmitter. Frekuensi kerja osilator PLL Synthesizer ini adalah 110,95 MHz – 131,95 MHz dengan step frekuensi 7 MHz.
1.2 PLL Synthesizer
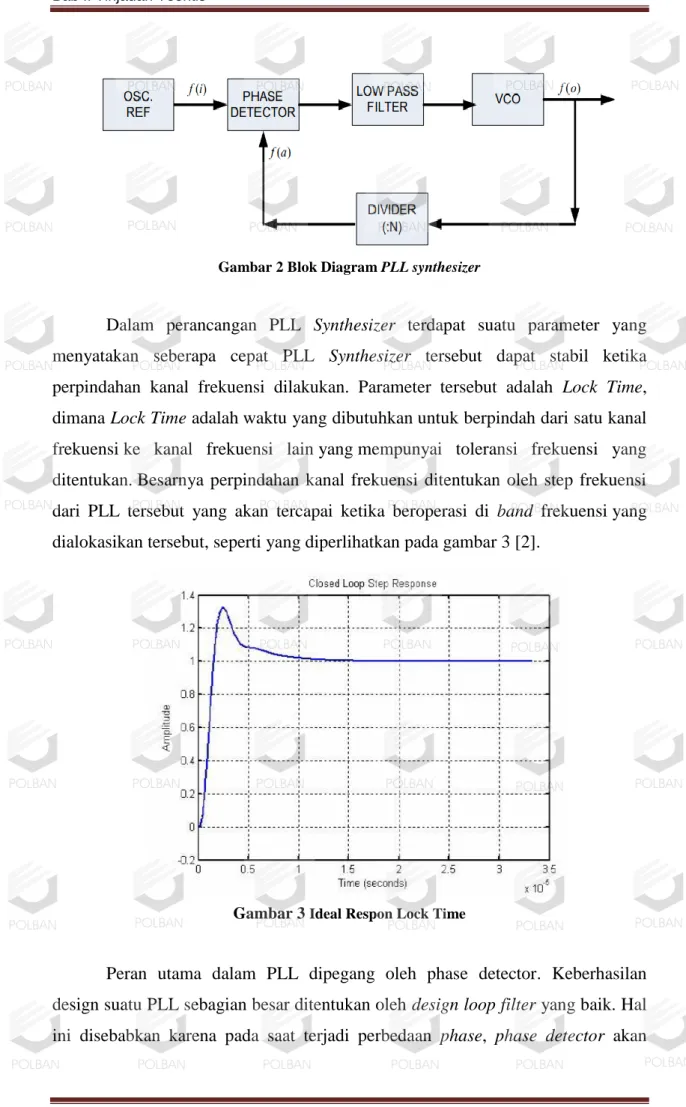
PLL kependekan dari 'Phase-Locked Loop' pada dasarnya adalah sebuah sistem kontrol frekuensi yang memanfaatkan sensitivitas deteksi fase antara sinyal input dan output dari sebuah rangkaian osilasi yang terkontrol [1]. Dimana dapat dilihat pada gambar 2.
Gambar 2 Blok Diagram PLL synthesizer
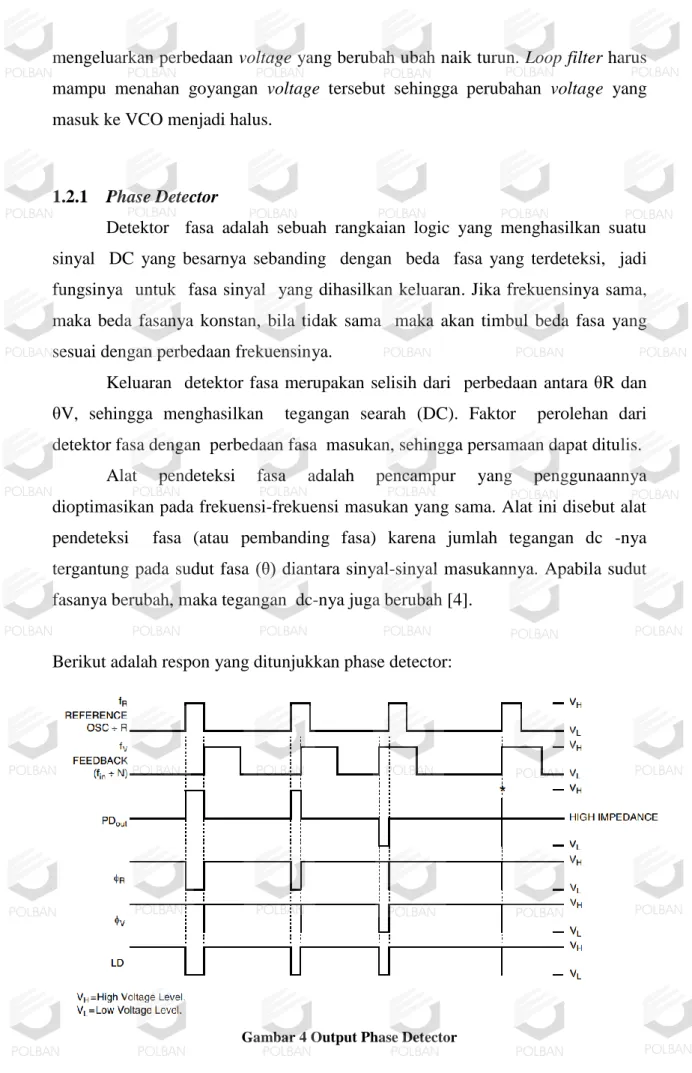
Dalam perancangan PLL Synthesizer terdapat suatu parameter yang menyatakan seberapa cepat PLL Synthesizer tersebut dapat stabil ketika perpindahan kanal frekuensi dilakukan. Parameter tersebut adalah Lock Time, dimana Lock Time adalah waktu yang dibutuhkan untuk berpindah dari satu kanal frekuensi ke kanal frekuensi lain yang mempunyai toleransi frekuensi yang ditentukan. Besarnya perpindahan kanal frekuensi ditentukan oleh step frekuensi dari PLL tersebut yang akan tercapai ketika beroperasi di band frekuensi yang dialokasikan tersebut, seperti yang diperlihatkan pada gambar 3 [2].
Gambar 3 Ideal Respon Lock Time
Peran utama dalam PLL dipegang oleh phase detector. Keberhasilan design suatu PLL sebagian besar ditentukan oleh design loop filter yang baik. Hal ini disebabkan karena pada saat terjadi perbedaan phase, phase detector akan
mengeluarkan perbedaan voltage yang berubah ubah naik turun. Loop filter harus mampu menahan goyangan voltage tersebut sehingga perubahan voltage yang masuk ke VCO menjadi halus.
1.2.1 Phase Detector
Detektor fasa adalah sebuah rangkaian logic yang menghasilkan suatu sinyal DC yang besarnya sebanding dengan beda fasa yang terdeteksi, jadi fungsinya untuk fasa sinyal yang dihasilkan keluaran. Jika frekuensinya sama, maka beda fasanya konstan, bila tidak sama maka akan timbul beda fasa yang sesuai dengan perbedaan frekuensinya.
Keluaran detektor fasa merupakan selisih dari perbedaan antara θR dan θV, sehingga menghasilkan tegangan searah (DC). Faktor perolehan dari detektor fasa dengan perbedaan fasa masukan, sehingga persamaan dapat ditulis.
Alat pendeteksi fasa adalah pencampur yang penggunaannya dioptimasikan pada frekuensi-frekuensi masukan yang sama. Alat ini disebut alat pendeteksi fasa (atau pembanding fasa) karena jumlah tegangan dc -nya tergantung pada sudut fasa (θ) diantara sinyal-sinyal masukannya. Apabila sudut fasanya berubah, maka tegangan dc-nya juga berubah [4].
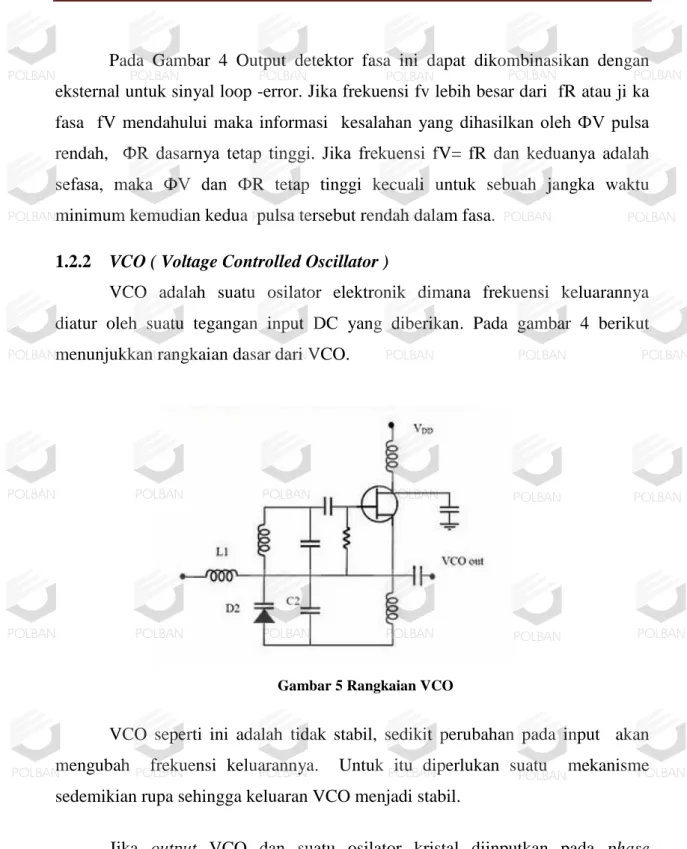
Berikut adalah respon yang ditunjukkan phase detector:
Gambar 4 Output Phase Detector
Pada Gambar 4 Output detektor fasa ini dapat dikombinasikan dengan eksternal untuk sinyal loop -error. Jika frekuensi fv lebih besar dari fR atau ji ka fasa fV mendahului maka informasi kesalahan yang dihasilkan oleh ФV pulsa rendah, ФR dasarnya tetap tinggi. Jika frekuensi fV= fR dan keduanya adalah sefasa, maka ФV dan ФR tetap tinggi kecuali untuk sebuah jangka waktu minimum kemudian kedua pulsa tersebut rendah dalam fasa.
1.2.2 VCO ( Voltage Controlled Oscillator )
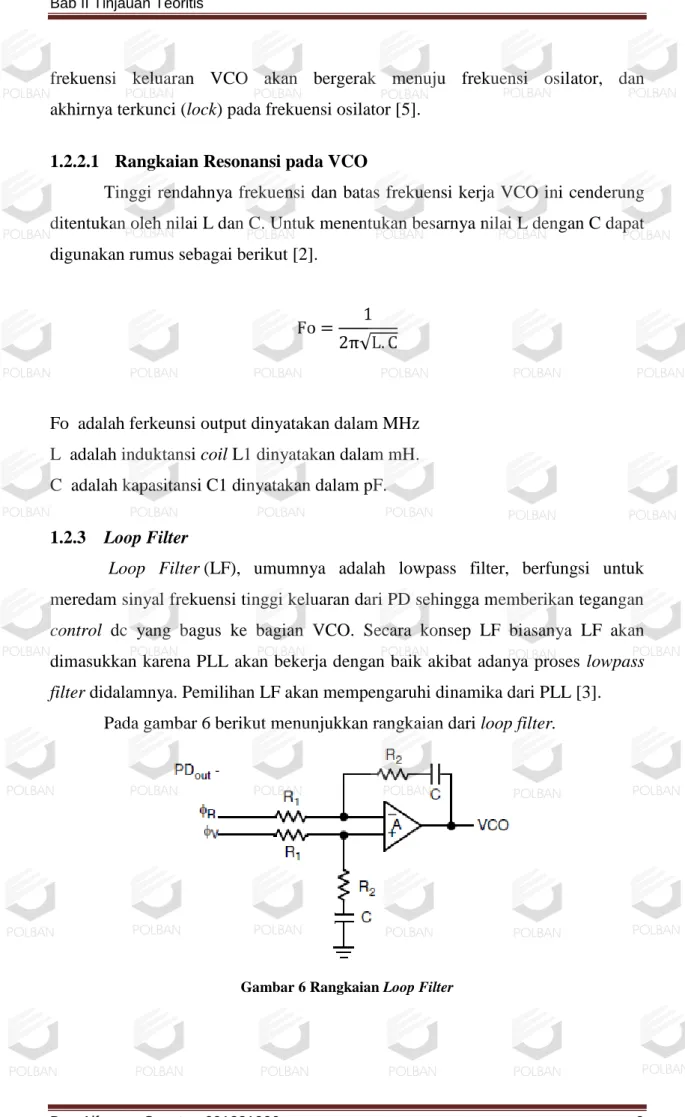
VCO adalah suatu osilator elektronik dimana frekuensi keluarannya diatur oleh suatu tegangan input DC yang diberikan. Pada gambar 4 berikut menunjukkan rangkaian dasar dari VCO.
Gambar 5 Rangkaian VCO
VCO seperti ini adalah tidak stabil, sedikit perubahan pada input akan mengubah frekuensi keluarannya. Untuk itu diperlukan suatu mekanisme sedemikian rupa sehingga keluaran VCO menjadi stabil.
Jika output VCO dan suatu osilator kristal diinputkan pada phase detector, dimana frekuensi dan phase kedua input sama, maka detektor tidak menghasilkan output. Sebaliknya, jika ada perbedaan phase, maka perbedaan itu dikonversi menjadi suatu tegangan output DC. Semakin besar perbedaan phase / frekuensi, maka semakin besar tegangan output detektor. Tegangan output detektor ini bisa diinputkan pada VCO sehingga
frekuensi keluaran VCO akan bergerak menuju frekuensi osilator, dan akhirnya terkunci (lock) pada frekuensi osilator [5].
1.2.2.1 Rangkaian Resonansi pada VCO
Tinggi rendahnya frekuensi dan batas frekuensi kerja VCO ini cenderung ditentukan oleh nilai L dan C. Untuk menentukan besarnya nilai L dengan C dapat digunakan rumus sebagai berikut [2].
Fo = 1
2π L. C
Fo adalah ferkeunsi output dinyatakan dalam MHz L adalah induktansi coil L1 dinyatakan dalam mH. C adalah kapasitansi C1 dinyatakan dalam pF.
1.2.3 Loop Filter
Loop Filter (LF), umumnya adalah lowpass filter, berfungsi untuk meredam sinyal frekuensi tinggi keluaran dari PD sehingga memberikan tegangan control dc yang bagus ke bagian VCO. Secara konsep LF biasanya LF akan dimasukkan karena PLL akan bekerja dengan baik akibat adanya proses lowpass filter didalamnya. Pemilihan LF akan mempengaruhi dinamika dari PLL [3].
Pada gambar 6 berikut menunjukkan rangkaian dari loop filter.
Gambar 6 Rangkaian Loop Filter
Komponen utama dalam Loop Filter adalah pemilihan nilai R dan C, dimana pemilihan nilai R dan C ini sangat berpengaruh terhadap kinerja Loop Filter, Dalam penentuan nilai R dan C terdapat beberapa nilai yang harus diketahui, diantaranya divider N min, divider N max, Natural frekuensi, Konstanta Penguatan Detektor Phasa, Konstanta Penguatan VCO, Faktor Dumping, dan Redaman Natural, berikut merupakan perhitungan untuk setiap nilai tersebut.
Menghitung divider N min
𝑁𝑚𝑖𝑛 =𝐹𝑚𝑖𝑛 𝐹𝑟𝑒𝑓
Menghitung divider N max
𝑁𝑚𝑎𝑥 =𝐹𝑚𝑎𝑥 𝐹𝑟𝑒𝑓 Menhitung Natural frekuensi
𝑊𝑛 =2π x Fref 2 Konstanta Penguatan Detektor Phasa, KΦ =VDD
4π Konstanta Penguatan VCO,
Kvco =2π (Fmax − Fmin) 𝑉𝐹𝑚𝑎𝑥 − 𝑉𝐹𝑚𝑖𝑛 Faktor Dumping, ξ = 1 Redaman natural, ωn= wn 1ms Maka, R2 = 2ξ ωn Jika c = 10 nF
Untuk mencari R1 perlu di lihat dari persamaan berikut, ωn2=KΦ. Kvco 𝑁𝑥𝐶𝑥𝑅1 Maka,
R1 = KΦ. Kvco 𝑁𝑥𝐶𝑥ωn2
1.3 Bagian Kontrol Digital
Mikrokontroller, sebagai suatu terobosan teknologi mikrokontroler dan mikrokomputer, hadir memenuhi kebutuhan pasar (market need) dan teknologi baru. Sebagai teknologi baru, yaitu teknologi semi konduktor dengan kandungan transistor yang lebih banyak namun hanya membutuhkan ruang kecil serta dapat diproduksi secara massal (dalam jumlah banyak) sehingga harga menjadi lebih murah (dibandingkan microprocessor). Sebagai kebutuhan pasar, mikrokontroler hadir untuk memenuhi selera industri dan para konsumen akan kebutuhan dan keinginan alat-alat bantu dan mainan yang lebih canggi serta dalam bidang pendidikan [7].
Microcontroller ATmega8535 merupakan salah satu keluarga dari MCS-51 keluaran Atmel. Jenis Microcontroller ini pada prinsipnya dapat digunakan untuk mengolah data per bit ataupun data 8 bit secara bersamaan.
Pada prinsipnya program pada Microcontroller dijalankan bertahap, jadi pada program itu sendiri terdapat beberapa set instruksi dan tiap instruksi itu dijalankan secara bertahap atau berurutan. Beberapa fasilitas yang dimiliki oleh microcontroller ATmega8535 adalah sebagai berikut :
1. Saluran I/O sebanyak 23 buah terbagi menjadi 3 port.
2. ADC sebanyak 6 saluran dengan 4 saluran 10 bit dan 2 saluran 8 bit 3. Tiga buah timer counter,dua diantaranya memiliki fasilitas
pembanding.
4. CPU dengan 32 buah register. 5. EEPROM sebesar 512 byte.
6. Empat buah programable port I/O yang masing-masing terdiri dari delapan buah jalur I/O
7. Memori flash sebesar 8K bites system Self-progamable Flash
8. Kemampuan untuk melaksanakan operasi aritmatika dan operasi logika
Kecepatan dalam melaksanakan instruksi per siklus 1 mikrodetik pada frekuensi 16 MHz.
1.3.1 Kontruksi ATMega8535
Memori merupakan bagian yang sangat penting pada Microcontroller. Microcontroller memiliki dua macam memori yang sifatnya berbeda. Read Only Memory (ROM) yang isinya tidak berubah meskipun IC kehilangan catu daya. Sesuai dengan keperluannya, dalam susunan MCS-51 memori penyimpanan program ini dinamakan sebagai memori program. Random Access Memory (RAM) isinya akan sirna begitu IC kehilangan catu daya, dipakai untuk menyimpan data pada saat program bekerja. RAM yang dipakai untuk menyimpan data ini disebut sebagai memori data [7].
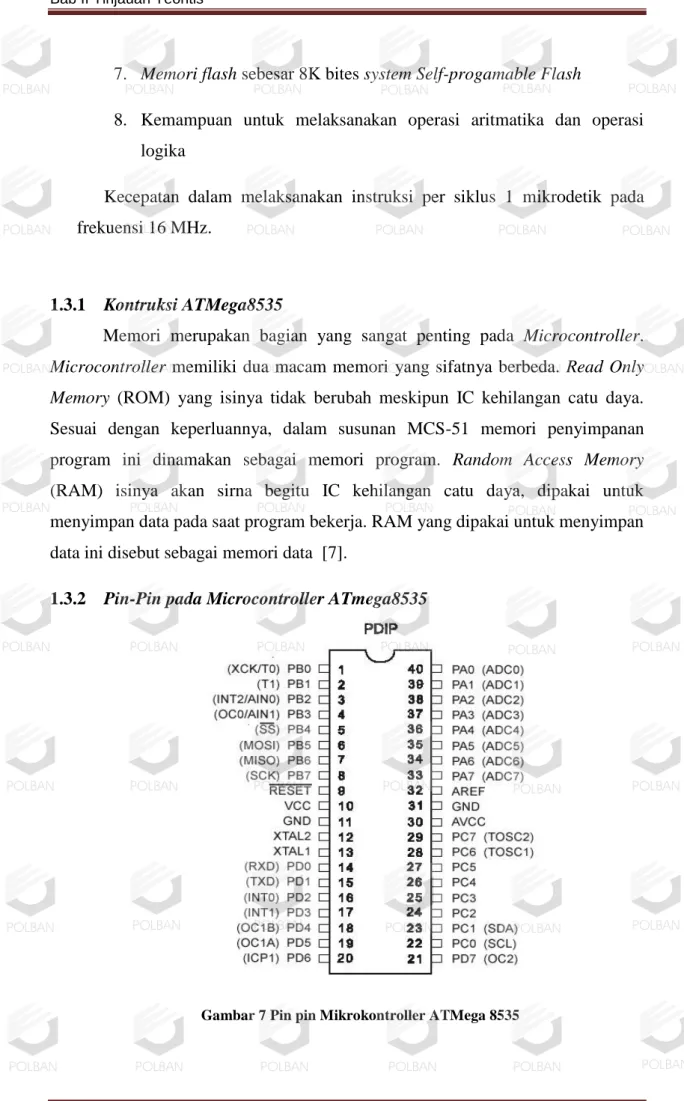
1.3.2 Pin-Pin pada Microcontroller ATmega8535
Gambar 7 Pin pin Mikrokontroller ATMega 8535
Deskripsi pin-pin Microcontroller ATmega8535 pada gambar 7 : VCC merupakan pin yang berfungsi sebagai pin masukan catu daya. GND merupakan pin ground.
Port A (PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC.
Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu Timer/Counter,komparator analog,dan SPI.
Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI,komparator analog dan Timer Oscillator
Port D (PD0..PD7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu komparator analog,interupsi eksternal,dan komunikasi serial RESET merupakan pin yang digunakan untuk me-reset mikrokontroler. XTAL1 dan XTAL2 merupakan pin masukan clock ekstenal.
AVCC merupakan pin masukan tegangan untuk ADC. AREF merupakan pin masukan tegangan referensi ADC [8].
1.4 Mixer
Mixer frekuensi adalah nonlinier sirkuit listrik yang menciptakan frekuensi baru dari dua sinyal diterapkan untuk itu. Dalam aplikasi yang paling umum, dua sinyal pada frekuensi f 1 dan f 2 diterapkan untuk mixer, dan menghasilkan sinyal baru pada jumlah f 1 + f 2 dan perbedaan f 1 - f 2 dari frekuensi aslinya.
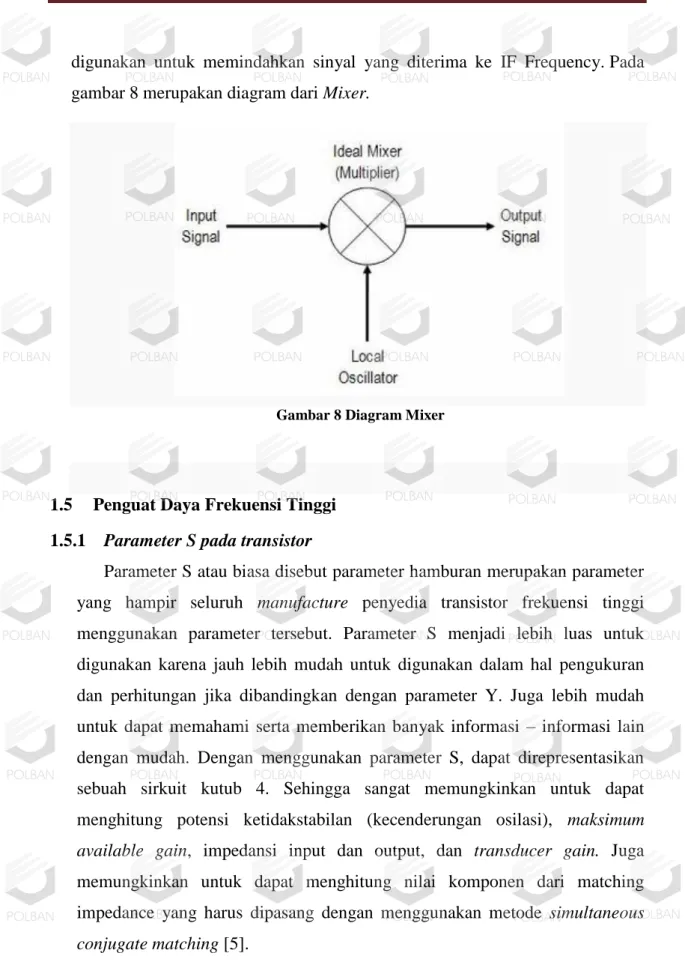
Mixer secara luas digunakan untuk menggeser sinyal dari satu rentang frekuensi ke yang lain, proses yang dikenal sebagai heterodyning , untuk kenyamanan dalam transmisi atau pemrosesan sinyal lebih lanjut. Misalnya, komponen kunci dari sebuah penerima superheterodyne adalah mixer
digunakan untuk memindahkan sinyal yang diterima ke IF Frequency. Pada gambar 8 merupakan diagram dari Mixer.
Gambar 8 Diagram Mixer
1.5 Penguat Daya Frekuensi Tinggi 1.5.1 Parameter S pada transistor
Parameter S atau biasa disebut parameter hamburan merupakan parameter yang hampir seluruh manufacture penyedia transistor frekuensi tinggi menggunakan parameter tersebut. Parameter S menjadi lebih luas untuk digunakan karena jauh lebih mudah untuk digunakan dalam hal pengukuran dan perhitungan jika dibandingkan dengan parameter Y. Juga lebih mudah untuk dapat memahami serta memberikan banyak informasi – informasi lain dengan mudah. Dengan menggunakan parameter S, dapat direpresentasikan sebuah sirkuit kutub 4. Sehingga sangat memungkinkan untuk dapat menghitung potensi ketidakstabilan (kecenderungan osilasi), maksimum available gain, impedansi input dan output, dan transducer gain. Juga memungkinkan untuk dapat menghitung nilai komponen dari matching impedance yang harus dipasang dengan menggunakan metode simultaneous conjugate matching [5].
1.5.1.1 Kestabilan Transistor
Kecenderungan dari suatu transistor untuk berisolasi dapat dihitung dengan data parameter S dari transistir tersebut. Perhitungan ini harus dilakukan sebelum membuat sebuah penguat dan merupakan metoda yang sangat berguna dalam mencari transistor yang sesuai untuk aplikasi yang diharapkan.
Untuk menentukan apakah suatu transistor memiliki kecenderungan untuk berosilasi dapat dihitung dengan menggunakan persamaan Rollet Stability Factor (K). 𝐾 = 1 + |𝐷𝑠| 2|𝑆 11|2|𝑆22|2 2|𝑆21||𝑆12| Dengan DS = = S11.S22 – S12.S21
Jika nilai K>1, maka transistor stabil mutlak (unconditionally stable) untuk setiap nilai impedansi sumber dan beban. Jika nilai K<1 maka transistor potensial tidak stabil (potentially unstable) dan akan berosilasi pada nilai impedansisumber dan beban tertentu [5].
1.5.1.2 Transistor Stabil Mutlak
Transistor stabil mutlak terjadi jika dipenuhi K>1. Maka rangkaian penyesuai impedansi dapat langsung dirancang secara simultaneous conjugate match yang berarti rangkaian penyesuai impedansi akan menghasilkan impedansi yang merupakan conjugate dari impedansi transistor[3].
Untuk mendapatkan nilai koefisien pantul dibeban dihitung dengan menggunakan rumus : 𝑟𝐿 = 𝐵2± 𝐵22− 4|𝐶2|2 2|𝐶2| Dengan C2 = S22 – (Ds.S11)* B2 = 1 + [S22]2 – [S11]2 – [Ds]2
Tanda ± pada persamaan diatas tergantung dari hasil perhitungan nilai B2. Jika nilai B2 (+) maka digunakan tanda (-), jika nilai B2 (-) maka
digunakan tanda (+). Untuk mendapatkan nilai koefisien pantul dari sumber dihitung dengan menggunakan rumus :
|𝑟𝑆| = 𝑆11 + 𝑆12𝑆21𝑟𝐿 1 − (𝑟𝐿𝑆22)
∗
1.5.1.3 Transistor Potensial Tak Stabil
Suatu transistor termasuk potensial tidak stabil jika nilai K<1. Perancangan rangkaian penyesuai imedansi harus menghasilkan impedansi yang tidak menyebabkan transistor berosilasi. Oleh karena itu hal pertama yang harus dilakukan adalah mengetahui daerah impedansi mana saja yang menyebabkan transistor menjadi tak stabil dengan membuat lingkaran kestabilan input dan output transistor pada smithchart.
Untuk membuat lingkaran kestabilan input dan output dapat dicari dengan menggunakan rumus : C1 = S11 – DS.S22* 𝑃𝑠 = 𝐶1∗ |𝑆112| − |𝐷𝑆|2 𝑟𝑆 = 𝑆12 |𝑆21| |𝑆11|2− |𝐷𝑆|2 C2 = S22 – DS.S11* 𝑃𝑙 = 𝐶2∗ |𝑆222| − |𝐷𝑆|2 𝑟𝑙 = 𝑆12| 𝑆21| |𝑆22|2− |𝐷 𝑆|2
PS = pusat lingkaran kestabilan input rS = jari jari lingkaran kestabilan input Pl = pusat lingkaran kestabilan output Rl = jari-jari lingkaran kestabilan output
Setelah mengetahui daerah mana saja yang menyebabkan transistor potensial tak stabil, maka harus dibuat lingkaran penguatan konstant. Untuk membuat lingkaran penguatan konstant pada smithchart dapat menggunakan rumus :
Pusat lingkaran
𝑃𝑂 = 𝐺𝐶2 ∗ 1 + 𝐷2𝐺 Jari jari lingkaran
𝑟𝑂 = 1 − 2𝐾|𝑆12𝑆21|𝐺 + |𝑆12𝑆21| 2𝐺2 1 + 𝐷2𝐺
Setelah lingkaran penguatan konstant diplot pada smithchart, kita plot titik koefisien pantul yang berada pada garis lingkaran penguatan konstan dan tidak berada pada daerah yang tak stabil. Untuk mencari nilai koefisien pantul disumber dapat menggunakan rumus :
|𝑟𝑆| = 𝑆11 + 𝑆12𝑆21𝑟𝐿 1 − (𝑟𝐿𝑆22)
∗
1.5.2 Pra Tegangan Transistor (Biasing)
Pada dasarnya rangkaian biasing berfungsi untuk menentukan titik kerja dan garis beban DC dari transistor. Selain itu berguna juga untuk mempertahankan kerja transistor agar tetap stabil walau terjadi perubahan arus transistor. Transistor akan berada pada daerah aktif dan bekerja pada daerah normal apabila tansistor diberikan forward bias pada emitter- base junction dan reverse bias pada collector – base junction. Ada beberapa contoh rangkaian biasing yang biasanya digunakan pada transistor BJT, yaitu self biasing dan fixed biasing.
1.5.2.1 Self bias
Self bias transistor adalah teknik pemberian tegangan basis transistor dan kaki transistor yang berdiri sendiri. Rangkain self bias transistor ini menggunakan rangkaian pembagi tegangan dari 2 buah resistor, dimana titik pembagian tegangan dihubungkan ke kaki basis transistor. Karena self bias transistor ini menggunakan bias tegangan melalui rangkaian pembagi tegangan maka self bias transistor ini sering juga disebut dengan bias pembagi tegangan.
Gambar 9 Rangkaian Self Bias
Dari gambar diatas, dapat diambil beberapa persamaan yaitu :
Vbb = R2 R1 + R2 x Vcc Rb = R1 . R2 R1 + R2 Ib = Vbb − Vbe Re β + 1 + Rb
Dari persamaan diatas kita akan mendapatkan harga VCEQ dan ICQ yang bertujuan untuk mendapatkan titik kerja dari garis beban pada transistor.
VCEQ = VCC – IC (RE + RC) ICQ = β . Ib
Garis beban diperoleh dari persamaan ICsat dan VCEcut-off , dimana untuk IE≈IC
ICsat = Vcc Rc + Re VCEcut-off = VCC
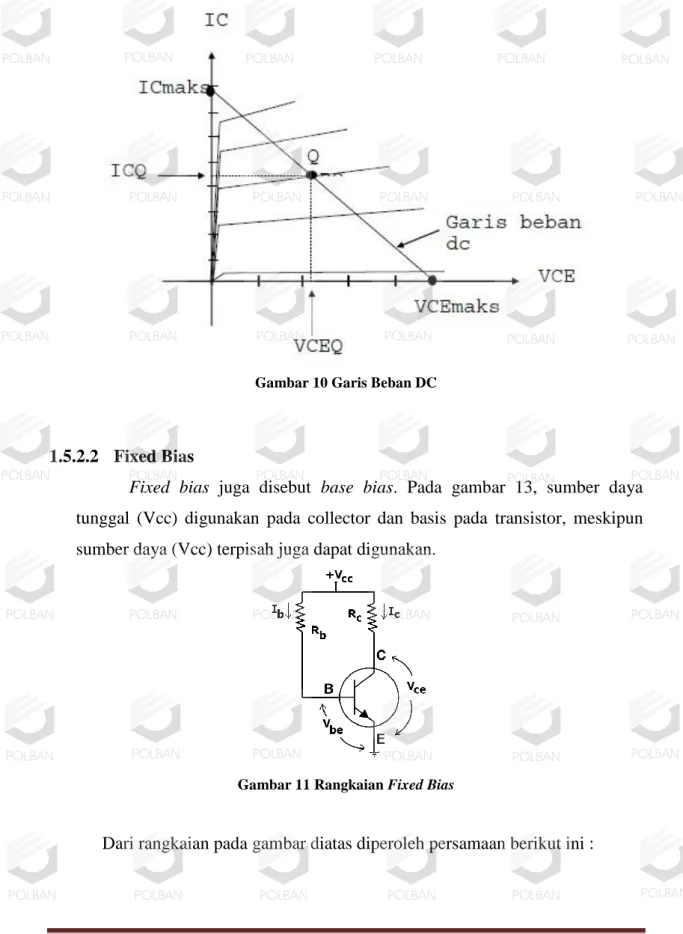
Maka akan diperoleh garis beban sebagai berikut :
Gambar 10 Garis Beban DC
1.5.2.2 Fixed Bias
Fixed bias juga disebut base bias. Pada gambar 13, sumber daya tunggal (Vcc) digunakan pada collector dan basis pada transistor, meskipun sumber daya (Vcc) terpisah juga dapat digunakan.
Gambar 11 Rangkaian Fixed Bias
Dari rangkaian pada gambar diatas diperoleh persamaan berikut ini :
Ib =Vc − Vb RF
IC = β . Ib
VC = VCE = IB RF + VBE
Dengan adanya resistor feedback yang menghubungkan antara collector dan base mengakibatkan adanya negative feedback yang berguna untuk menjaga kestabilan transistor.
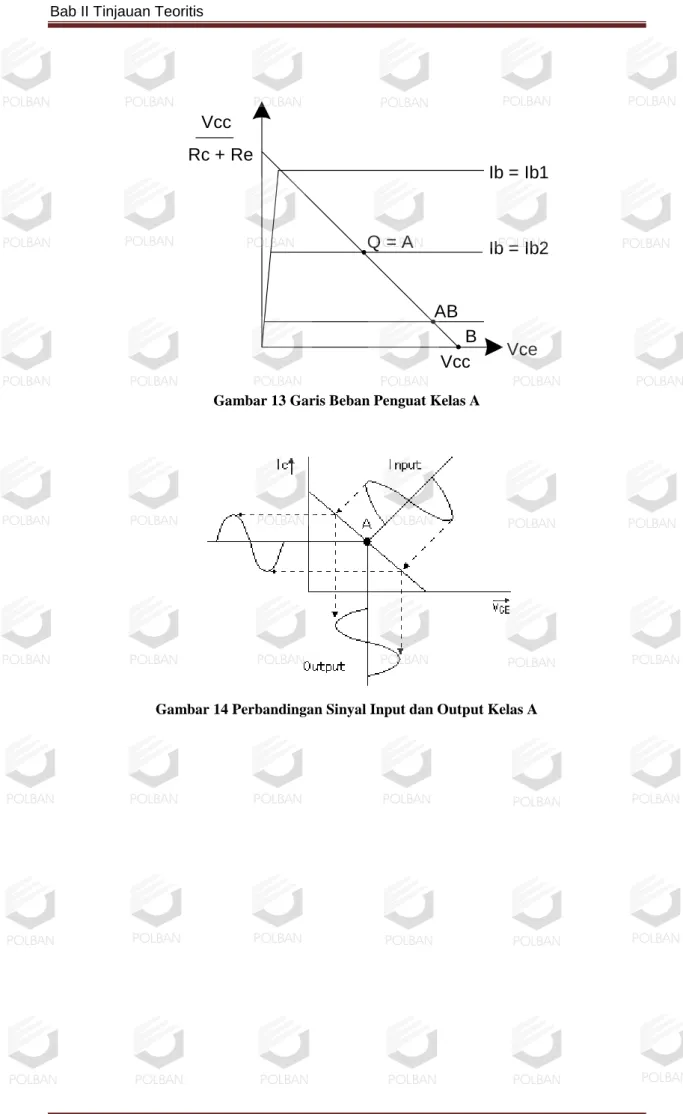
1.5.3 Penguat Kelas A
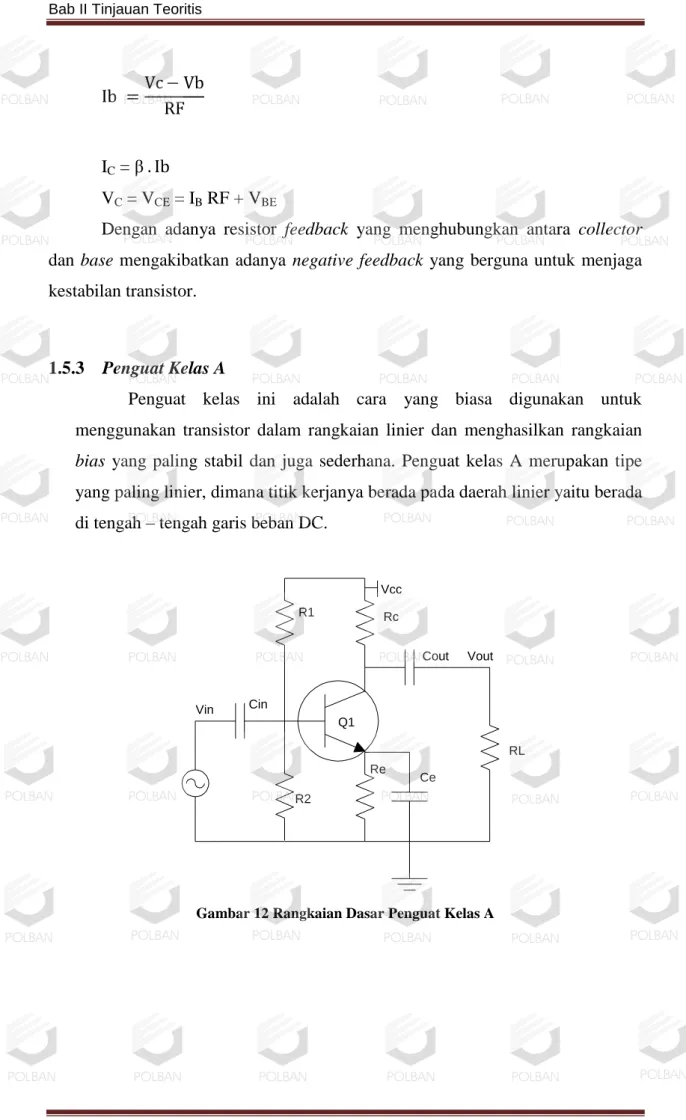
Penguat kelas ini adalah cara yang biasa digunakan untuk menggunakan transistor dalam rangkaian linier dan menghasilkan rangkaian bias yang paling stabil dan juga sederhana. Penguat kelas A merupakan tipe yang paling linier, dimana titik kerjanya berada pada daerah linier yaitu berada di tengah – tengah garis beban DC.
Vout Cout RL Ce R2 R1 Rc Re Vin Cin Q1 Vcc
Gambar 12 Rangkaian Dasar Penguat Kelas A
Q = A AB B Vce Vcc Ib = Ib1 Ib = Ib2 Rc + Re Vcc
Gambar 13 Garis Beban Penguat Kelas A
Gambar 14 Perbandingan Sinyal Input dan Output Kelas A