RANCANG BANGUN QUADCOPTER ROBOT SEBAGAI ALAT
PEMANTAU JARAK JAUH KAWASAN LINGKUNGAN BENCANA
I.B. Alit Swamardika1), I N. Setiawan2), I N. Budiastra3)
123Teknik Elektro, Fakultas Teknik, Universitas Udayana, Jimbaran, Badung Telp/Fax : (0361) 703315,E-mail : alit_bbc@yahoo.com
Abstrak
Seiring perkembangan teknologi yang semakin maju, teknologi robot banyak digunakan sebagai alat bantu manusia dalam berbagai bidang. Salah satu perkembangan teknologi robot adalah robot terbang Quadcopter. Quadcopter robot merupakan sebuah pesawat tanpa awak atau UAV (Unmanned Aerial Vehicle) yang memiliki empat buah baling-baling dan empat buah motor brushless yang berfungsi sebagai actuator. Quadcopter dirancang menggunakan KK Board V 2.0 Flight Controller yang merupakan rangkaian pengendali putaran motor dan sekaligus memiliki sensor Accelerometer sebagai sensor percepatan dan sensor Gyroscop sebagai sensor keseimbangan atau kestabilan. Pengendalian robot menggunakan remote control (RC), serta dipasang kamera GoPro HD Hero2 untuk memantau kondisi lingkungan. Dari hasil pengujian bahwa quadcopter memiliki beban maksimum 4,4 kg dan jarak jangkauan RC adalah 100 meter tanpa menghalang dan 50 meter dengan penghalang. Dalam pengujian robot dapat terbang dengan ketinggian 10 sampai 15 meter dari permukaan tanah. Robot dilengkapi dengan kamera, sehingga robot terbang quadcopter dapat digunakan untuk memantau tempat-tempat sulit dijangkau.
Kata kunci: Rancang bangun, Quadcopter robot, Flight controler, GoPro camera
Abstract
Along with the development of increasingly advanced technology, robotic technology is widely used in human activities. One of the development of robot technology is a flying robot. Quadcopter robots is a drone or UAV (Unmanned Aerial Vehicle) which has four blades and four brushless motors that function as actuators. Quadcopter designed using KK Board V 2.0 Flight Controller which is the controlling circuit of the rotation motor and has accelerometer sensor as well as acceleration sensors and Gyroscop sensor as the balance or the stability sensor. Controlling the robot using a remote control (RC), and mounted GoPro HD hero2 camera to monitor environmental conditions. From the test results that the quadcopter has a maximum load of 4.4 kg and range of RC is 100 meters and 50 meters without a stonewall with a barrier. In testing the robot can fly at a height of 10 to 15 meters from the ground. The robot is equipped with a camera, so the quadcopter flying robots can be used to monitor the disaster areas.
Keywords: Design, Quadcopter Robot, Flight controler, GoPro camera
1. PENDAHULUAN
Seiring perkembangan teknologi yang semakin maju, robot merupakan teknologi yang dikembangkan untuk membantu manusia dalam melakukan pekerjaan tertentu, misalnya pekerjaan yang membutuhkan ketelitian tinggi, berisiko tinggi, pekerjaan yang membutuhkan tenaga besar, ataupun pekerjaan yang berulang-ulang dan monoton. Selain itu dapat juga digunakan pada tempat-tempat yang tidak mudah dijangkau atau berbahaya bagi manusia.
Salah satu teknologi robot yang sedang dikembangkan oleh beberapa negara adalah robot terbang baik yang berbentuk pesawat maupun helikopter dengan berbagai jenis. Robot terbang dari jenis helikopter dipergunakan untuk keperluan yang tidak dapat dijangkau oleh manusia seperti untuk memantau kemacetan jalan, survei dan pemetaan, robot mata-mata, memantau bencana alam, memantau kebakaran lahan, alat bantu pemadam kebakaran, media pencarian pada misi Search and
Rescue (SAR), iring-iringan presiden dan memantau konstruksi bangunan dalam bidang teknik
sipil.
(2011) menggunakan sebuah kamera yang dipasang pada quadcopter yang berfungsi sebagai sistem navigasi pada quadcopter robot sehingga memungkinkan quadcopter mampu bergerak secara otomatis. Sedangkan Zhang, dkk.( 2012) merancang sebuah quadcopter yang mampu bergerak dengan menggunakan visual flight control, dimana robot dapat memvisualkan kondisi lingkungan sekitarnya yang kemudian bergerak berdasarkan motion detector yang terdapat pada robot tersebut sehingga menungkinkan robot bergerak secara otomatis.
Dilihat dari perkembangan teknologi robot khususnya robot terbang, serta kondisi di Indonesia yang sering terjadi bencana dan gangguan keamanan, maka dalam penelitian ini dirancang robot terbang jenis helikopter dengan empat motor dan empat baling-baling yang disebut quadcopter.
Quadcopter dirancang menggunakan KK Board V 2.0 Flight Controller yang merupakan sebuah
rangkaian pengendali putaran motor dan sekaligus memiliki sensor Accelerometer sebagai sensor percepatan dan sensor Gyroscop sebagai sensor keseimbangan atau kestabilan. Pengendalian robot menggunakan remote control (RC), serta dipasang kamera GoPro HD Hero2 untuk memantau kondisi lingkungan, sehingga diharapkan mampu memberikan solusi untuk mempercepat pencarian korban bencana alam.
2. BAHAN DAN METODE
2.1. Bahan
Adapun bahan yang digunakan dalam perancangan antara lain :
1. Modul remote control sebagai pengirim dan penerima data instruksi.
2. GoPro HD Hero2 Camera sebagai alat untuk mengambil gambar yang dipasang pada robot 3. LCD karakter 16x2 sebagai penampil data instruksi.
4. Baterai Litium Polymer Nanotech 3Cell 2200 mAh.
5. Motor Brushless NTM prop drive series 28-26A 1200Kv/250w.
6. Flight Controller KK.Board V2.0.
7. ESC (Electronic Speed Controller) Turnigy Multistar 30 (OPTO).
8. Propeller 11x4.5 CW dan CCW.
9. Komponen-komponen elektronika, kabel, PCB (Printing Circuit Board), timah dan konektor.
10. Software Code Vision AVR
2.2. Metode
2.2.1. Langkah-langkah penelitian.
Adapun langkah-langkah penelitian yang akan dilakukan adalah sebagai berikut :
1. Pendefinisian permasalahan dari aplikasi yang ingin dibuat untuk menambah pemahaman mengenai lingkup topik yang akan dikerjakan.
2. Pengumpulan data yang berhubungan dengan kamera pada quadcopter robot untuk pemantauan kawasan bencana dan sistem keamanan melalui studi literature dan pengukuran.
3. Pemahaman mengenai proses-proses yang diperlukan untuk pemodelan sistem perangkat lunak dan perancangan perangkat keras dalam pembuatan sistem kendali
quadcopter robot dan kamera pada quadcopter robot untuk pemantauan kawasan bencana
dan sistem kontrol lingkungan yang susah dijangkau oleh manusia.
4. Perancangan dan realisasi perangkat keras, baik itu secara skematik maupun layout PCB, menggunakan software DIP TRACE.
5. Melakukan pengujian di setiap perangkat keras yang telah direalisasikan, pengujian apakah perangkat keras sudah bekerja dengan baik.
7. Melakukan pengujian koneksi komputer dengan perangkat keras, apakah sudah berjalan dengan baik antara perangkat keras dengan komputer dapat mengirimkan data melalui downloder.
8. Menyiapkan dan melakukan pengujian kestabilan dari robot untuk mengetahui pengaruh berat wireless camera pada robot serta menguji komunikasi wireless camera dalam mengirimkan dan menerima data.
9. Membahas hasil pengujian. 10. Pengambilan kesimpulan
2.2.2. Perancangan quadcopter robot
Perancangan quadcopter robot dilakukan dengan menggunakan software Sketch-Up Pro, yang bertujuan untuk memberikan bayangan umum mengenai mekanik robot. Berikut ini merupakan gambaran detail dari perancangan mekanik robot beserta ukuran dan beratnya:
1. Diameter Quadcopter : 60 cm 2. Tinggi Quadcopter : ± 15 cm 3. Berat Quadcopter : ± 3,1 kg
Perancangan mekanik quadcopter robot yang dilengkapi kamera, yang bertujuan untuk mengambil gambar di suatu keadaan. Berikut ini merupakan gambar desain quadcopter robot dengan kamera yang digunakan:
Gambar 1. Desain Quadcopter Robot dengan Kamera
Untuk dapat mengimplementasikan remote control ke dalam quadcopter robot. Secara umum komunikasi antara pengguna dengan quadcopter robot dilakukan melalui media komunikasi. Intruksi untuk menggerakan mobile robot dilakukan dengan mengerakkan remote oleh pengguna.
Gambar 2 mengilustrasikan cara kerja dari sistem pengendalian quadcopter robot menggunakan
remote control yang dikomunikasikan dengan quadcopter robot.
Gambar 2. Ilustrasi cara kerja quadcopter robot dengan remote control 3. HASIL DAN PEMBAHASAN
3.1. Realisasi Hasil Rancangan Quadcopter Robot
Gambar 3. Realisasi Quadcopter Robot 3.2. Pengujian Sinyal PWM Quadcopter Robot Controller
Pengujian sinyal PWM (pulse width modulation) pada rangkaian receiver ini bertujuan untuk mengetahui perubahan besar nilai PWM input aileron,, elevator, Throttel, dan Rudder yang akan dikirim ke flight controller agar mampu membuat quadcopter bergerak.
Untuk dapat membuat quadcopter bergerak maju dan mundur maka PIN elevator pada flight
controller harus diberikan sinyal PWM yang berasal dari rangkaian receiver, sedangkan untuk
dapat membuat quadcopter bergerak ke kiri dan ke kanan maka PIN aileron pada flight controller harus diberikan sinyal PWM yang berasal dari rangkaian receiver, kemudian untuk dapat membuat
quadcopter terbang naik dan turun maka PIN Throttle pada flight controller harus diberikan sinyal
PWM yang berasal dari rangkaian reciever, sedangkan untuk dapat membuat quadcopter pada kondisi steady maka PIN elevator dan PIN aileron pada flight controller harus diberikan nilai yang sama. Agar dapat membuat quadcopter berputar pada posisi horizontal pada saat terbang, maka PIN Rudder pada Flight Controller harus diberikan sinyal PWM yang berasal dari rangkaian
reciever.
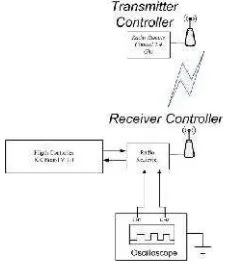
Untuk dapat mengetahui besar nilai PWM yang masuk kedalam PIN aileron, elevator, Throtle, dan
Rudder PIN tersebut harus dihubungkan terlebih dahulu dengan oscilloscope, adapun blok diagram
dari pengujian ini adalah sebagai berikut:
Gambar 4. Diagram blok pengujian PWM
Dari blok diagram pengujian yang terdapat pada Gambar 4 dapat dijelaskan bahwa nilai PWM yang terdapat pada rangkaian receiver tergantung dari data yang dikirimkan oleh rangkaian
transmitter.
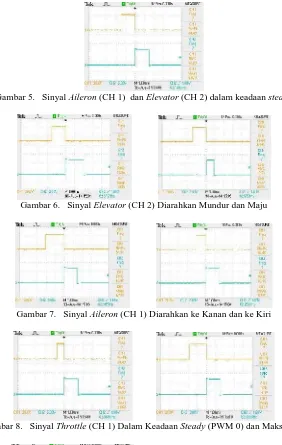
Gambar 5. Sinyal Aileron (CH 1) dan Elevator (CH 2) dalam keadaan steady
Gambar 6. Sinyal Elevator (CH 2) Diarahkan Mundur dan Maju
Gambar 7. Sinyal Aileron (CH 1) Diarahkan ke Kanan dan ke Kiri
Gambar 8. Sinyal Throttle (CH 1) Dalam Keadaan Steady (PWM 0) dan Maksimum
3.3. Pengujian Daya Angkat Dari Quadcopter Robot
Pengujian daya angkat dari kombinasi motor dan blade yang digunakan pada quadcopter robot berfungsi untuk mengetahui seberapa besar beban maksimal yang dapat diberikan pada quadcopter agar dapat terbang dengan baik. Berdasarkan hasil pengujian sebelumnya, berat dari quacopter saat ini adalah sebesar 3,1 Kg. Berikut ini gambaran dari pengujian daya angkat dari kombinasi motor dan blade yang digunakan pada quadcopter.
Gambar 10. Pengujian daya angkat dari quadcopter robot
Hasil pengujian diperoleh bahwa, daya angkat dari kombinasi motor dan blade yang digunakan adalah sebesar 1,1 Kg. Jadi pada quadcopter dengan empat buah motor dan blade, mampu mengangkat beban sebesar 4,4 Kg. Saat ini berat quadcopter adalah 3,1 Kg, sehingga masih mampu diberi tambahan beban sekitar 1,3 Kg.
3.4. Pengujian Kualitas Pengiriman Gambar Kamera
Pada pengujian pengiriman gambar dari kamera GoPro Hero 2 ke layar Televisi menggunakan
Video Sender 5.8G akan di paparkan menggunakan table hasil pengujian jarak dan hasil gambar
yang di terima pada televisi. Pengujian ini dilaksanakan di Jurusan Teknik Elektro Udayana Kampus Bukit.
Tabel 1. Hasil pengujian Kualitas Gambar
No Jarak Tx dan Rx (Meter) Kondisi Keterangan Kualitas Gambar
1 1 Line of side Baik sekali
2 5 Line of side Baik
Hasil pengujian didapat bahwa kamera yang digunakan dapat mengambil gambar pada jarak ± 100 meter dalam kondisi tanpa halangan dengan hasil yang baik.
3.5. Pengujian Terbang Quadcopter Robot
Dari beberapa pengujian terbang, baik dalam ruangan maupun luar ruangan didapat hasil bahwa
quadcopter mampu terbang pada ketinggian maksimum ± 15 meter dengan jangkauan ± 50 meter,
pada kondisi angin normal.
Gambar 11. Uji terbang di dalam ruangan
Gambar 12. Hasil rekaman kamera dari quadcopter saat terbang 4. KESIMPULAN
Adapun kesimpulan yang dapat diambil dari pembahasan yang telah dilakukan adalah rancang bangun quadcopter robot dengan dipasangkan kamera sudah berjalan baik, dimana pengendalian pergerakan quadcopter robot ini meliputi pergerakan maju, mundur, kanan, dan kiri sudah dapat di lakukan. Demikian juga dengan proses pengambilan gambar sudah dapat dilakukan dengan baik, sehingga tujuan untuk digunakan sebagai pemantau lingkungan bisa dilaksanakan.
UCAPAN TERIMA KASIH
Melalui kesempatan ini, penulis menyampaikan ucapan terima kasih yang sebesar-besarnya kepada Lembaga Penelitian dan Pengabdian Kepada Masyarakat Universitas Udayana atas bantuan dananya melalui dana hibah PNBP Universitas Udayana dengan Surat Penugasan Penelitian No: 238-3/UN14.2/PNL.01.03.00/2014 tanggal 14 Mei 2014.
Ucapan terima kasih juga penulis sampaikan kepada Mahasiswa Tim Asisten Praktikum Laboratorium Teknik Kendali Jurusan Teknik Elektro Fakultas Teknik Universitas Udayana, atas kerja keras dan kerjasamanya dalam membantu menyelesaikan penelitian ini.
DAFTAR PUSTAKA
Andika, F. (2012). Perancangan dan Implementasi Autonomous Landing Menggunakan Behavior-Based dan Fuzzy Controller pada Quadcopter. Surabaya: JurnalTeknik ITS. Vol.1, No.1.
Anonim.(2010b). Wiring Diagram Motor Brushless. [cited 2013 November 8 ]. Avaliable From: URL; www.orientalmotor.com.
Anonim.(2010c). Sinyal PWM. [cited 2013 November 8]. Avaliable From: URL; www.elektronika-dasar.web.id
Engel, J. (2011). Autonomous Camera-Based Navigation of a Quadcopter. Jerman: (Thesis) Universitas Munchen Jerman.
Ogata, K. (1994). Teknik Kontrol Automatik Jilid 1. Jakarta: Erlangga.
Zhang, L.; Zhang, T.; Wu, H.; Borst, A.; Kuhnlenz, K. (2012). Visual Flight Control of a Quadcopter Using Bioinspired Motion Detector. Jerman: International Journal of Navigation