PERANCANGAN ALAT BACA SENSOR BERAT BEBAN DENGAN MENGGUNAKAN SENSOR FIBER OPTIK
DAN ARDUINO MEGA 2560
TUGAS AKHIR
SAHAT MARTUA HALAWA 132408042
PROGRAM STUDI D-3 FISIKA DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN
PERANCANGAN ALAT PENGUKURAN BERAT BEBAN DENGAN MENGGUNAKAN SENSOR FIBER OPTIK
DAN ARDUINO MEGA 2560
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh Ahli Madya
SAHAT MARTUA HALAWA 132408042
PROGRAM STUDI D-3 FISIKA DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN
2016
PERSETUJUAN
Judul : Perancangan Alat Ukur Berat Beban dengan Mengunakan Sensor Fiber Optik dan Arduino
Mega 2560
Kategori : Tugas Akhir
Nama : Sahat Martua Halawa
Nomor Induk Mahasiswa : 132408042
Program Studi : Diploma 3 ( D-3) Fisika
Departemen : Fisika
Fakultas : Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara
Disetujui di Medan,
Disetujui Oleh
Prodi D-3 Fisika FMIPA USU Pembimbing, Ketua,
Dr. Susilawati, M.Si Dra. Sudiati, M.Si
NIP. 19741207200122001 NIP. 19590519186012001
PERNYATAAN
PERANCANGAN ALAT BACA BERAT BEBAN DENGAN MENGGUNAKAN SENSOR FIBER OPTIK
DAN ARDUINO MEGA 2560
TUGAS AKHIR
Saya mengakui bahwa tugas akhir ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan,
SAHAT MARTUA HALAWA 132408042
ABSTRAK
Di zaman yang modern ini perkembangan teknologi sangat cepat dan berdampak pada segala aspek bidang pekerjaan sehingga banyak penerapan ilmu dan teknologi yang dirancang untuk mempermudah suatu sistem pekerjaan. Kelebihan muatan merupakan kasus tidak terpantaunya berat beban kendaraan. Untuk mengatasi kendala tersebut maka hadir teknologi Weight In Motion (WIM) yang memungkinkan berat suatu benda dapat diketahui secara cepat. Salah satu komponen penting dalam sistem WIM adalah sensor. Tujuan penelitian ini adalah melakukan investigasi terhadap serat optik sebagai sensor beban. Hasil investigasi diharapkan dapat mengetahui potensi serat optik sebagai sensor beban baik beban diam maupun beban berjalan. Prinsip kerja sensor ini adalah dengan memanfaatkan prinsip rugi-rugi microbending fiber optics. Microbending adalah salah satu tipe bending yang terjadi ketika permukaan serat optik mengalami tekanan kemudian menyebabkan terjadinya deformasi pada inti serat optik.
Kata kunci : Microbending, sensor beban, sensor serat optik.
ABSTRACT
In this modern age of technology development is very fast and have an impact on all aspects of the work of so many application of science and technology designed to simplify a system work. Cases in poorly loads monitoring, especially heavy vehicles. One of contributing factor is the relatively long time to detect the weight of a vehicle. Weight In Motion (WIM) technology comes with the ability to knows the weight of an object quickly. One of important component in WIM system is a sensor. The purpose of research is to investigate the optical fiber as a load sensor.
Results of the investigation are expected to know the potential of optical fiber sensor for statics load and dynamics load The fiber optic sensor use microbending principle and then detect power losses in fiber optics.Microbending is one type of bending when the surface of the fiber optic having pressure and than resulting deformation in the optical fiber core.
KEYWORDS: micro bending, load sensor, optical fiber sensor
PENGHARGAAN
Segala puji dan syukur kepada Tuhan Yang Maha Esa, dengan limpahan berkat-Nya penyusunan Tugas Akhir ini dapat diselesaikan sesuai waktu yang telah ditetapkan.
Tugas Proyek ini disusun untuk melengkapi persyaratan dalam mencapai gelar Ahli Madya pada Program Studi Diploma Tiga Fisika Departemen Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
Adapun judul Tugas Proyek ini adalah :
PERANCANGAN ALAT BACA SENSOR BERAT BEBAN DENGAN MENGGUNAKAN SENSOR FIBER OPTIK DAN ARDUINO MEGA 2560
Penulis menyadari bahwa tersusunnya Tugas Proyek ini dari Do‘a, perhatian, bimbingan, motivasi dan dukungan berbagai pihak, sehingga dengan keikhlasan dan kerendahan hati pada kesempatan ini penulis mengucapkan terima kasih yang sebesar-besarnya kepada :
1. Drs, Krista Sebayang M.Sc, selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara
2. Dr. Susilawati, M.Si, selaku Ketua Program Studi D-3 Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam dan selaku dosen pembimbing, yang telah banyak membantu dan mendukung penulis dalam menyelesaikan Tugas Proyek ini.
3. Dr. Perdinan Sinuhaji, M.S, selaku Sekretaris Program Studi D-3 Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam.
4. Dr. Bambang Widiyatmoko. M.Eng, selaku Kepala Pusat Penelitian Fisika, Lembaga Ilmu Pengetahuan Indonesia
5. Dwi Hanto, M.Si, selaku Pembimbing di Pusat Penelitian Fisika, Lembaga Ilmu Pengetahuan Indonesia.
6. Seluruh Dosen dan Karyawan Program Studi D-3 Fisika Departemen Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas
7. Seluruh Staf dan pegawai Pusat Penelitian Fisika Lembaga Penelitian dan Ilmu Pengetahuan Alam.
8. Kedua orang tua penulis yang telah memberikan bantuan moril maupun materil, semangat, do‘a yang begitu besar kepada penulis.
9. Saudara-saudara penulis, Lisbet halawa, Putrita halawa, dan Sadarman halawa yang selalu memberikan semangat dalam penulisan Tugas Akhir ini.
10. Terima kasih juga kepada sahabat terbaik dikuliah, Arif Halim Syofra, Rischi michael Siregar, Roy batoran Siagian, Sati Kadri Iskandar dan Putri Azwannur Sinaga.
11. Rekan D-3 Fisika yang mendukung penulis menyelesaikan Tugas Proyek ini.
12. Rekan di Pusat Penelitian Fisika-LIPI yang berjuang bersama penulis dan seluruh pihak yang telah banyak membantu penulis dalam menyelesaikan Tugas Proyek yang namanya tidak dapat penulis sebutkan satu persatu.
Penulis menyadari sepenuhnya bahwa dalam pembuatan Tugas Proyek ini masih jauh dari kesempurnaan, untuk itu penulis mengharapkan kritik dan saran dari pembaca yang bersifat membangun dalam penyempurnaan Tugas Proyek ini.
Semoga Tugas Proyek ini menjadi ibadah yang baik bagi penulis dan menjadi ilmu yang bermanfaat bagi pembaca.
Medan, Juni 2016
Penulis
DAFTAR ISI
Halaman
Abstrak ... ...i
Abstract ... ..ii
Penghargaan ... .iii
Daftar Isi ... ..v
Daftar Tabel...viii
Daftar Gambar ...ix
BAB 1. PENDAHULUAN ... 1.1. Latar Belakang ... 1
1.2. Rumusan Masalah ... 4
1.3. Tujuan Penulisan ... 4
31.4. Batasan Masalah ... 5
1.5. Metodologi Penulisan ... 5
1.6. Sistematika Penulisan ... 6
BAB 2. LANDASAN TEORI ... 2.1. Fiber Optik ... 7
2.1.1. Kelebihan Fiber Optik... 8
2.1.2. Kekurangan Fiber Optik ... 8
2.2. Cara Kerja Fiber Optik... 9
2.3. Komponen-Komponen Fiber optik ... 12
2.3.1. Cahaya Pembawa Informasi ... 13
2.3.2. Optical Transmitte (Pemancar) ... 13
2.3.3. Kabel Fiber Optik ... 14
2.4. Prinsip dan Tipe Serat Optik ... 14
2.5. Konenktor Serat Optik...18
2.6. Optical Regenerator/Amplifier/Repeater...19
2.7. Optical Reciever (Penerima) ... 19
2.8. LCD ... 19
2.8.1. Register Pada LCD ... 22
2.8.2. Konfigurasi Pin LCD ... 24
2.8.3. Instruksi Dasar LCD ... 26
2.9. Tranformator ... 26
2.10. Mikrokontroller Arduino Mega 2560 ... 28
2.10.1. Arduino Mega 2560 ... 29
2.10.2. Pemetaan PIN ... 31
2.10.3. Sumber Daya ... 36
2.10.4. Memori ... 37
2.10.5. Input Output ... 37
2.10.6. Komunikasi ... 39
2.10.7. Software Arduino ... 40
2.10.8. Bahasa Pemrograman Arduino Berbasis Bahasa C ... 41
2.11. Photodioda ... 44
2.12. Amplifier ... 46
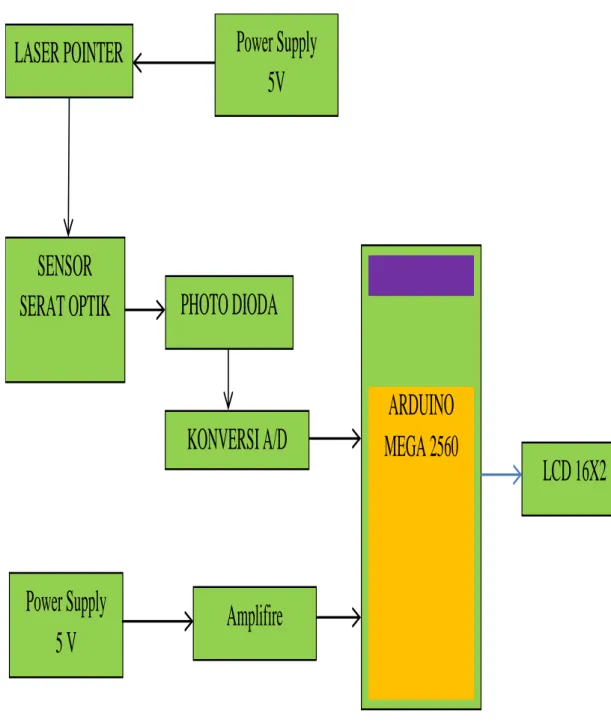
BAB 3. PERANCANGAN DAN PEMBUATAN ... 3.1. Diagram Blok Sistem ... 47
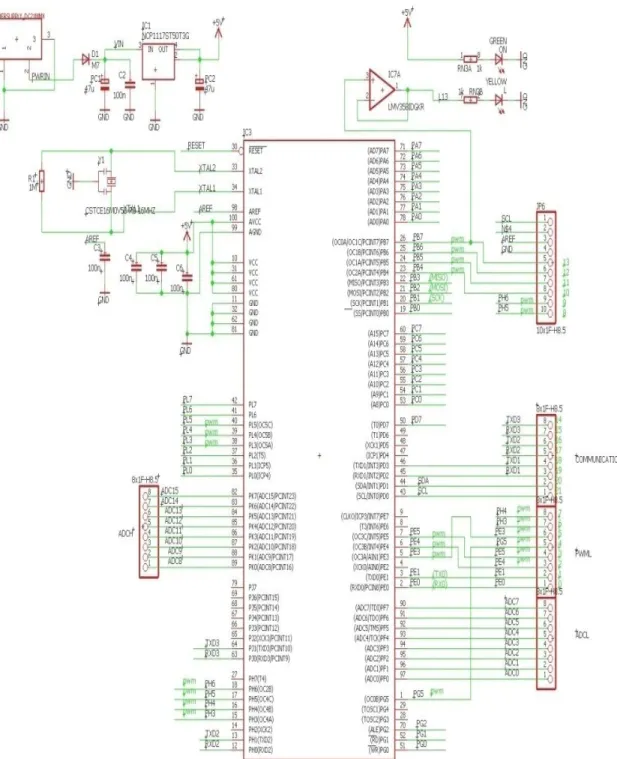
3.2. Rangkaian Mikrokontroller Arduino Mega 2560 ... 48
3.3. Display LCD Character 16x2... 50
3.4. Rangkaian /Perancangan Rangkaian LCD ... 51
3.5. OPM (Optical Power Meter)...52
3.6. Flowchart Sistem ... 53
BAB 4. PENGUJIAN RANGKAIAN ... 4.1. Pengujian Kesetabilan Laser ... 54
4.2. Pengujian Pengaruh Diameter dan Jarak Kawat terhadap Respon Sensor Berat ... 58
4.3. Pengujian Validitas dan Realibilitas Sensor Beban ... 61
4.4. Pengujian PSA untuk Laser ... 63
4.5. Pengujian PSA untuk Amplifire...63
4.6. Pengujian Amplifire...64
4.7. Pengujian Rangkaian LCD ... 66
4.7.1. Penulisan Data Register Perintah LCD M1632 ... 67
4.7.2. Pembacaan Data Register Perintah LCD M1632...67
4.8. Pengujian Arduino Mega 2560 ... 70
4.9. Pengujian Alat Ukur Dengan Fiber Optik Dan Arduino Mega 2560...73
BAB 5. PENUTUP ... 5.1. Kesimpulan ... 79
5.2. Saran ... 80 DAFTAR PUSTAKA
DAFTAR TABEL
Halaman
Tabel 2.1. Daftar Pin Arduino Mega 2560...31
Tabel 2.2. Spesifikasi Arduino Mega2560...35
Tabel 4.1. Pengujian Berat Vs Tegangan...76
Tabel 4.2. Pengujian Beban Vs W...77
DAFTAR GAMBAR
Halaman
Gambar 2.1. Fiber Optik...9
Gambar 2.2. Serat Optik...10
Gambar 2.3. Bagian Serat Optik... ...12
Gambar 2.4. Single Mode...15
Gambar 2.5. Multi Mode Step Indeks ...16
Gambar 2.6. Multi Mode Grade Indeks...17
Gambar 2.7. LCD...20
Gambar 2.8. Tampilan LCD Character 2 x 16...24
Gambar 2.9. Trafo...27
Gambar 2.10. Hubungan Primer-Skunder...27
Gambar 2.11. Lilitan Primer-Skunder ...28
Gambar 2.12. Arduino Mega 2560...30
Gambar 2.13. Konfigurasi Pin Arduino Mega 2560...31
Gambar 2.14. Tampilan Arduino IDE...40
Gambar 2.15. Amplifire...46
Gambar 3.1. Diagram Blok Rangkaian ...47
Gambar 3.2. Rangkaian Sistem Minimum Arduino Mega 2560...49
Gambar 3.3. LCD Character 16x2...50
Gambar 3.4. Peta Memori LCD character 16 x 2...50
Gambar 3.5. LCD dihubungkan ke Arduino...51
Gambar 3.7. Flow Chart Program... ...53
Gambar 4.1. Grafik Kestabilan Laser Volt Vs Jumlah Data...54
Gambar 4.2. Laser Pointer...55
Gambar 4.3. Laser Pointer Diuji...56
Gambar 4.4. Software In Motion Basen Of...56
Gambar 4.5. Flow Chart Pengujian Kestabilan Laser...57
Gambar 4.6. Beban Uji yang Diletakkan Terpusat Diatas Sensor Beban...59
Gambar 4.7. Software In Motion Basen Optical Fiber...59
Gambar 4.8. Flow chart Pengujian Variasi Diameter dan Jarak Kawat...60
Gambar 4.9. Sensor Untuk Pengujian Valditas dan Realibilitas...62
Gambar 4.10. Tegangan Output PSA Untuk Laser...63
Gambar 4.11. Tegangan Output Untuk Amplifire...64
Gambar 4.12. Hasil Data Amplifire...65
Gambar 4.13. Grafik Amplifire Tegangan Vs Jumlah Data...65
Gambar 4.14. Rangkaian LCD ...68
Gambar 4.15. Tampilan Keluaran Dari LCD 16 x 2...69
Gambar 4.16. Grafik beban Vs Tegangan...77
Gambar 4.17 Grafik beban Vs W...78
x
BAB I PENDAHULUAN
1.1. Latar Belakang
Sejak diperkenalkan oleh Kao dan Hockham bahwa serat optik dapat digunakan pada sistem komunikasi, metode modulasi cahaya pada serat optik telah banyak diinvestigasi. Bentuk metode modulasi ini merupakan dasar dari sensor serat optik. Pada tahun 1970- an, eksperimen pertama dilakukan dengan menggunakan serat optik dengan loss rendah. Divais semacam ini disebut Optical Fiber Sensors (OFSs). Hal ini hanya berhubungan dengan aplikasi dalam bidang telekomunikasi. Pada penelitian kali ini serat optik dikembangkan menjadi lebih baik dari segi aplikasi, bukan dalam bidang telekomunikasi melainkan dalam bidang sensor. Dari kelemahan serat optik sebagai kabel transmisi data di bidang telekomunikasi yaitu memiliki loss atau rugi optik yang mengakibatkan data dapat hilang, maka muncul aplikasi dalam serat optik bahwa kelemahan serat optik tersebut dapat dimanfaatkan untuk mendeteksi gaya. Pada penelitian ini akan dikembangkan sensor beban berbasis serat optik dengan prinsip mikrobending.
Dengan prinsip ini maka serat optik akan dapat mengalami rugi-rugi daya optik sehingga serat optik dapat mendeteksi berapa besar gaya yang diterima oleh serat optik sehingga sinyal cahaya yang mengalami rugi optik atau pelemahan akan ditransmisikan untuk dikonversi menjadi parameter yang dibutuhkan dan dalam hal ini yaitu besar beban terukur. Sehingga diharapkan dengan prinsip dan teknik mikrobending ini pula serat optik dapat dimanfaatkan sebagai sensor beban yang
nantinya diharapkan dapat diaplikasikan pada alat timbang yang masih menggunakan sensor konvensional (analog). Latar belakang mengapa penelitian ini dilakukan juga karena terdapatnya beban berlebih pada jalan disebabkan penyelewengan pengawasan pada jembatan timbang terhadap beban kendaraan yang melintasi jalan. Dampak nyata yang ditimbulkan oleh muatan berlebih (overloading) adalah kerusakan jalan. Untuk dapat mengatasi hal tersebut, diperlukan alat timbang beban kendaraan. Saat ini alat timbangan yang ada masuh menggunakan sensor konvensional (analog) sehingga masih dapat mengalami gangguan elektromagnetik. Terdapat beberapa teknik untuk mengukur beban yang sekarang digunakan ini yaitu piezoelektrik, lempeng kapasitif, hidrolik dan pelat beban yang dibengkokkan, akan tetapi metode tersebut memiliki beberapa kelemahan yaitu mudah korosi, jangkauan kecepatan kecil, mudah mengalami gangguan elektromagnetik, akurasi rendah, pembuatan dan instalasi yang sulit, ukuran besar dan harga tinggi. Perkembangan teknologi sensor serat optik yang memiliki keuntungan diantaranya sensitivitas tinggi, tahan terhadap gangguan elektromagnetik, suhu tinggi dan korosi dibandingkan dengan sensor sebelumnya dapat menjadi alternatif untuk mengukur beban. Sensor serat optik merupakan basis teknologi yang dapat diterapkan untuk banyak aplikasi penginderaan Sensor serat optik mempunyai banyak keuntungan dibandingkan dengan sensor elektronik konvensional, keuntungan-keuntungan itu antara lain adalah (1) mudah diintegrasikan dengan jaringan serat optik yang ada, (2) tidak mengalirkan arus listrik, (3) tahan terhadap interferensi elektromagnetik dan interferensi frekuensi radio, (4) ringan, (5) tahan terhadap lingkungan yang korosif dan basah, (6) sensitivitas tinggi, (7) mempunyai kemampuan yang tinggi untuk membentuk
jaringan sensing, (8) kemampuan sensing multifungsi seperti regangan, tekanan, korosi, temperatur dan sinyal akustik. Perkembangan teknologi komputer saat ini yang berkembang pesat juga mempunyai dampak terhadap perkembangan teknologi serat optik. Hal ini karena kepraktisan dari peralatan tersebut sehingga sangat mudah untuk dikembangkan lebih lanjut. Sensor Microbend adalah salah satu sensor serat optik awal dikembangkan dan telah digunakan oleh beberapa peneliti selama lebih dari tiga puluh tahun. Sensor microbend Serat optik telah digunakan dalam beberapa aplikasi industri seperti pengukuran tekanan dalam sistem peralatan antarmuka [1], suhu dan pengukuran tekanan dalam tangki bahan bakar pesawat [2], investigasi karakteristik berbagai bidang [3], sensor pH [4], akustik dan sensor perpindahan [5]. Prinsip kerja dari sensor serat optik berdasarkan pada pemanfaatan rugi-rugi akibat pembengkokan mikro (microbending) pada serat optik yang mengakibatkan perubahan intensitas cahaya yang ditransmisikan oleh serat optik. Sehingga serat optik dapat digunakan dalam pengukuran parameter-parameter fisis diantaranya tegangan, tekanan, strain dan temperatur.
Sensor serat optik yang didasarkan pada prinsip kerugian daya optik yang disebabkan oleh pembengkokan mikro (mikrobending) juga memiliki bentuk padat yang baik, struktur sederhana, biaya rendah dan lainya. Dengan demikian studi sensor serat optik dengan mikrobending menjadi sangat penting.
Dalam decade terakhir, sensor berat berbasis serat optik, didasarkan pada perubahan pada parameter sinyal optik karena regangan serat optik akibat berat kendaraan yang lewat, telah mendapat perhatian. Sensor ini lebih tahan lama, relatif murah dalam pembuatan dan operasi. Namun, serat optik terutama
digunakan sebagai detektor untuk kendaraan karena akurasi rendah pada pengukur berat (khususnya penimbang beban bergerak) dan ketergantungan tinggi terhadap kondisi cuaca.
Pada 1990-an , muncul sensor gaya berbasis serat optik untuk penimbang dan kontrol sistem gerak pada kendaraan atau transportasi. Penggunaan serat optik disetujui karena biaya rendah, kemudahan instalasi di jalan-jalan dengan lalu lintas yang padat. Kabel serat optik ditempatkan dalam alur sempit di seberang jalan yang dilapisi dengan karet yang tahan, dan transmisi tekanan ban kendaraan pada kabel serat optik. Arus lalu lintas tidak boleh terganggu untuk waktu yang lama, sehingga kemudahan dan kecepatan instalasi sensor melebihi kekurangan sensor yaitu akurasi pengukuran rendah.
1.2. Rumusan Masalah
Tugas akhir ini membahas tentang:
1. Perancangan sensor beban menggunakan serat optik mikrobending sehingga terdapat beberapa kombinasi
2. Pengujian kesetabilan laser sebagai sumber cahaya pada sensor
3. Analisa pengaruh diameter dan jarak kawat terhadap mikrobending pada serat optik dengan Anova pada signifikansi 0.05
4. Pengujian Validitas dan Reliabilitas Sensor Beban berbasis Serat Optik
1.3. Tujuan Penulisan
Adapun penulisan tigas akhir ini adalah untuk:
1. Untuk mengetahui kestabilan laser yang digunakan sebagai sumber cahaya pada sensor
2. Untuk mengetahui pengaruh jarak dan diameter kawat terhadap respon sensor beban menggunakan serat optik dengan prinsip mikrobending
3. Untuk mengetahui validitas dan reliabilitas sensor beban berbasis serat optik
1.4. Batasan Masalah
Adapun batasan masalah dalam laporan proyek ini adalah :
1. Perancangan sensor beban menggunakan serat optik mikrobending sehingga terdapat beberapa kombinasi
2. Pengujian kesetabilan laser sebagai sumber cahaya pada sensor
3. Analisa pengaruh diameter dan jarak kawat terhadap mikrobending pada serat optik dengan Anova pada signifikansi 0.05
4. Pengujian Validitas dan Reliabilitas Sensor Beban berbasis Serat Optik
1.5. Metodologi Penulisan
Adapun metode penulisan yang digunakan dalam menyusun dan menganalisa tugas akhir ini adalah:
1. Studi literatur yang berhubungan dengan perancangan dan pembuatan sensor serat optik dengan prinsip mikrobending
2. Perencanaan dan pembuatan sensor serat optik dengan prinsip mikrobending yang akan diuji
3. Pengujian pengaruh diameter dan jarak kawat terhadap mikrobending 4. Pengujian validitas dan reliabilitas sensor serat optik dengan prinsip mikrobending
5. Analisa data-data penelitian untuk keperluan informasi mengenai sensor serat optik dengan prinsip mikrobending
6. Penarikan kesimpulan
1.6. Sistematika Penulisan
Sistematika penulisan dalam tugas akhir ini terdiri dari 5 bab, yaitu:
BAB I : PENDAHULUAN
Berisi latar belakang permasalahan, rumusan masalah, batasan masalah, tujuan pembahasan, metodologi pembahasan, dan sistematika penulisan dari penulisan laporan proyek ini.
BAB II : LANDASAN TEORI
Membahas tentang teori Cahaya, sensor dan transduser, serat optik beserta prinsip mikrobending.
BAB III : PERANCANGAN SISTEM
Membahas tentang perencanaan dan pembuatan sistem secara keseluruhan.
BAB IV : PENGUJIAN RANGKAIAN
Berisi tentang uji coba alat yang telah dibuat, pengoperasian dan spesifikasi alat.
BAB V : PENUTUP
Bab ini berisi kesimpulan yang diperoleh dari bab sebelumnya yaitu hasil dan pembahasan terkait tujuan dari penelitian. Dan juga saran yang diberikan untuk kajian lebih lanjut dari skripsi ini
BAB II
LANDASAN TEORI
Landasan teori sangat membantu untuk dapat memahami suatu sistem. Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu sistem. Dengan pertimbangan hal-hal tersebut, maka landasan teori merupakan bagian yang harus dipahami untuk pembahasan selanjutnya. Pengetahuan yang mendukung perencanaan dan realisasi alat meliputi sensor berat berbasis fiber optik dan arduino.
2.1. Fiber Optik
Fiber Optik adalah saluran transmisi atau sejenis kabel yang terbuat dari
kaca atau plastik yang sangat halus dan lebih kecil dari sehelai rambut, dan dapat digunakan untuk mentransmisikan sinyal cahaya dari suatu tempat ke tempat lain.
Sumber cahaya yang digunakan biasanya adalah dari sinar laser atau LED.
Kabel ini berdiameter lebih kurang 120 mikrometer. Cahaya yang ada di dalam serat optik tidak keluar karena indeks bias dari kaca lebih besar daripada indeks bias dari udara, karena laser mempunyai spektrum yang sangat sempit.
Kecepatan transmisi fiber optiksangat tinggi sehingga sangat bagus digunakan sebagai saluran komunikasi.
Perkembangan teknologi fiber optik saat ini, telah dapat menghasilkan pelemahan (attenuation) kurang dari 20 decibels (dB)/km. Dengan lebar jalur (bandwidth) yang besar, maka mampu dalam mentransmisikan data menjadi lebih banyak dan cepat dibandingan dengan penggunaan kabel konvensional. Dengan
demikian fiber optik sangat cocok digunakan terutama dalam aplikasi sistem telekomunikasi.
Sekitar 20 tahun yang lalu, kabel fiber optik telah memngambil alih dan mengubah wajah teknologi industri telepon jarak jauh maupun industri automasi dengan pengontrolan jarak jauh. Serat optik juga memberikan peranan besar membuat Internet dapat digunakan di seluruh dunia. Pada tahun 1997 fiber optik menghubungkan seluruh dunia, Fiber-Optic Link Around the Globe (FLAG) menjadi jaringan kabel terpanjang di seluruh dunia yang menyediakan infrastruktur untuk generasi internet terbaru.
2.1.1. Kelebihan Fiber Optik
1. Bandwidth sangat besar dengan kecepatan transmisi mencapai gigabit-per detik dan menghantarkan informasi jarak jauh tanpa pengulangan
2. Biaya pemasangan dan pengoperasian yang rendah serta tingkat keamanan yang lebih tinggi
3. Ukuran kecil dan ringan, sehingga hemat pemakaian ruang
4. Kebal terhadap gangguan elektromagnetik dan gangguan gelombang radio 5. Tidak ada tenaga listrik dan percikan api
6. Tidak berkarat
2.1.2. Kekurangan Fiber Optik
1. Beberapa faktor membatasi efektivitas kabel FO. Selain instalasinya yang mahal, sistem ini mungkin sinyalnya kurang kuat, hal ini disebabkan karena faktor fisik ataupun material.
2. Dispersi dapat mempengaruhi volume informasi yang dapat diakomodasi.
3. Tidak seperti halnya dengan kawat atau plastik, fiber juga lebih sulit untuk disambung.
4. Sambungan akhir dari kabel fiber harus benar-benar akurat untuk menghindari transmisi yang tidak jelas.
5. Komponen Fiber Optik mahal dan membutuhkan biaya ekstra dalam pengaplikasian yang lebih spesifik.
2.2. Cara Kerja Fiber Optik
Pada prinsipnya fiber optik memantulkan dan membiaskan sejumlah cahaya yang merambat di dalamnya. Efisiensi dari serat optik ditentukan oleh kemurnian dari bahan penyusun gelas/kaca. Semakin murni bahan gelas, semakin sedikit cahaya yang diserap oleh fiber optik.
Untuk mengirimkan percakapan-percakapan telepon atau internet melalui fiber optik, sinyal analog di rubah menjadi sinyal digital. Sebuah laser transmitter pada salah satu ujung kabel melakukan on/off untuk mengirimkan setiap bit sinyal. System fiber optikmodern dengan single laser bisa mentransmitkan jutaan bit/second. Atau bisa dikatakan laser transmitter on dan off jutaan kali /second. Sebuah kabel fiber optics terbuat dari serat kaca murni, sehingga meski panjangnya berkilo-kilo meter, cahaya masih dapat dipancarkan dari ujung ke ujung lainnya.
2.1. Gambar Fiber Optik
Helai serat kaca tersebut didesain sangat halus,ketebalannya kira-kira sama dengan tebal rambut manusia. Helai serat kaca dilapisi oleh 2 lapisan plastik (2 layers plastic coating) dengan melapisi serat kaca dengan plastik, akan didapatkan equivalen sebuah cermin disekitar serat kaca. Cermin ini menghasilkan total internal reflection (refleksi total pada bagian dalam serat kaca).
2.2. Gambar Serat Optik
Sama halnya ketika kita berada pada ruangan gelap dengan sebuah jendela kaca, kemudian kita mengarahkan cahaya senter 90 derajat tegak lurus dengan kaca, maka cahaya senter akan tembus ke luar ruangan. Akan tetapi jika cahaya senter tersebut diarahkan ke kaca jendela dengan sudut yang rendah (hampir paralel dengan cahaya aslinya), maka kaca tersebut akan berfungsi menjadi cermin yg akan memantulkan cahaya senter ke dalam ruangan. Demikian pula pada fiber optics, cahaya berjalan melalui serat kaca pada sudut yang rendah.
Serat optik adalah saluran transmisi atau sejenis kabel yang terbuat dari kaca atau plastik yang sangat halus dan lebih kecil dari sehelai rambut, dan dapat digunakan untuk mentransmisikan sinyal cahaya dari suatu tempat ke tempat lain.
Sumber cahaya yang digunakan biasanya adalah laser atau LED. Kabel ini berdiameter lebih kurang 120 mikrometer. Cahaya yang ada di dalam serat optik
tidak keluar karena indeks bias dari kaca lebih besar daripada indeks bias dari udara, karena laser mempunyai spektrum yang sangat sempit.
Efisiensi dari serat optik ditentukan oleh kemurnian dari bahan penyusun gelas/kaca. Semakin murni bahan gelas, semakin sedikit cahaya yang diserap oleh serat optik.
Serat optik dibuat dari silikon dan germanium bereaksi dengan oksigen membentuk SiO2 dan GeO2. SiO2 dan GeO2 menyatu dan membentuk kaca serat optik terdiri dari 3 bagian seperti gambar 2.2.2, yaitu :
1. Core adalah kaca tipis yang merupakan bagian inti dari serat atau inti fisik yang mengirim sinyal data optik dari sumber cahaya ke alat penerima yang berupa untai tunggal kontinyu dari kaca atau plastik. Semakin besar core maka semakin banyak cahaya yang dapat dilewatkan dalam kabel.
2. Cladding adalah materi yang mengelilingi inti yang berfungsi memantulkan sinar kembali ke dalam inti(core), atau layer/lapisan serat yang berfungsi sebagai pembatas energi elektromagnetik yang terlalu besar, gelombang cahaya dan penyebab pembiasan pada struktur inti. Pembuatan cladding yang cukup tebal memungkinkan medan serat tidak dipengaruhi oleh perambatan disekitar bahan sehingga bentuk fisik serat tidak cacat.
3. Buffer Coating adalah plastik pelapis yang melindungi serat dari kerusakan.
lapisan plastik disekitar core dan cladding ini juga berfungsi memperkuat inti serat, membantu penyerapan dan sebagai pelindung ekstra pada pembengkokan kabel.
2.3. Gambar Bagian Serat Optik
Reliabilitas dari serat optik dapat ditentukan dengan satuan BER (Bit error rate). Salah satu ujung serat optik diberi masukan data tertentu dan ujung yang lain mengolah data itu. Dengan intensitas laser yang rendah dan dengan panjang serat mencapai beberapa km, maka akan menghasilkan kesalahan. Jumlah kesalahan persatuan waktu tersebut dinamakan BER. Dengan diketahuinya BER maka, Jumlah kesalahan pada serat optik yang sama dengan panjang yang berbeda dapat diperkirakan besarnya.
2.3. Komponen komponen fiber optik
Sebuah sistem komunikasi tentu tidak hanya didukung oleh satu dua komponen atau perangkat saja. Di dalamnya pasti terdapat banyak sekali paduan komponen yang saling bekerja sama satu dengan yang lainnya. Perpaduan dan kerja sama tersebut akan menghasilkan banyak sekali manfaat bagi berlangsungnya transfer informasi. Dengan demikian, jadilah sebuah sistem komunikasi. Di dalamnya terdapat proses modulasi agar sinyal-sinyal informasi yang sebenarnya dapat dimungkinkan dibawa melalui udara. Dan setibanya di lokasi tujuan, proses demodulasi akan terjadi untuk membuka informasi aslinya
kembali. Jika berjalan dalam jarak yang jauh maka penguat sinyal pasti dibutuhkan.
Proses komunikasi pada sistem fiber optik juga mengalami hal yang sama seperti sistem komunikasi yang lainnya. Lima komponen utama dalam sistem komunikasi fiber optik adalah sebagai berikut:
2.3.1. Cahaya Pembawa Informasi
Inilah sumber asal-muasal terjadinya sistem komunikasi fiber optik. Cahaya, komponen alam yang memiliki banyak kelebihan ini dimanfaatkan dengan begitu pintarnya untuk membawa data dengan kecepatan dan bandwidth yang sangat tinggi. Semua kelebihan dari cahaya seakan-akan dimanfaatkan di sini. Cahaya yang berkecepatan tinggi, cahaya yang kebal terhadap gangguan-gangguan, cahaya yang mampu berjalan jauh, semuanya akan Anda rasakan dengan menggunakan media fiber optik ini.
2.3.2. Optical Transmitter (Pemancar)
Optical transmitter merupakan sebuah komponen yang bertugas untuk mengirimkan sinyal-sinyal cahaya ke dalam media pembawanya.
Di dalam komponen ini terjadi proses mengubah sinyal-sinyal elektronik analog maupun digital menjadi sebuah bentuk sinyal-sinyal cahaya. Sinyal inilah yang kemudian bertugas sebagai sinyal korespondensi untuk data Anda. Optical transmitter secara fisik sangat dekat dengan media fiber optic pada penggunaannya. Dan bahkan optical transmitter dilengkapi dengan sebuah lensa yang akan memfokuskan cahaya ke dalam media fiber optik tersebut. Sumber cahaya dari komponen ini bisa bermacam-macam.
Sumber cahaya yang biasanya digunakan adalah Light Emitting Dioda (LED) atau solid state laser dioda. Sumber cahaya yang menggunakan LED lebih sedikit mengonsumsi daya daripada laser.
Namun sebagai konsekuensinya, sinar yang dipancarkan oleh LED tidak dapat menempuh jarak sejauh laser.
2.3.3. Kabel Fiber optik
Komponen inilah yang merupakan pemeran utama dalam sistem ini. Kabel fiber optik biasanya terdiri dari satu atau lebih fiber optik yang akan bertugas untuk memandu cahaya-cahaya tadi dari lokasi asalnya hingga sampai ke tujuan. Kabel fiber optic secara konstruksi hampir menyerupai kabel listrik, hanya saja ada sedikit tambahan proteksi untuk melindungi transmisi cahaya. Biasanya kabel fiber optic juga bisa disambung, namun dengan proses yang sangat rumit. Proses penyambungan kabel ini sering disebut dengan istilah splicing.
2.4 Prinsip dan Tipe Sensor Optik
Sensor serat optik adalah jenis sensor optik yang menggunakan serat optik dalam mekanisme penginderaan atau pendeteksian, baik sebagai komponen aktif sensor maupun sekedar sebagai pemandu gelombang (optik) saja. Sistem sensor optik dilengkapi dengan paling tidak tiga komponen utama, yaitu komponen optoelektronik, link optik dan probe. Komponen optoelektronika meliputi sumber cahaya, detektor optik dan pengolah sinyal. Link optik berupa gelombang serat optik yang berfungsi memandu cahaya ke atau dari bagian penginderaan (sensing region).
Sedangkan probe adalah bagian sensing atau transducing, baik pada bagian dalam maupun luar serat optik, yang bertindak sebagai transduser dan berinteraksi langsung dengan obyek atau besaran yang diukur. Sensor serat optik didasarkan pada mekanisme modulasi gelombang optic (cahaya) dari suatu sumber seperti LED, diode laser, atau yang lainnya. Kuantitas optik yang dimodulasi dapat berupa intensitas atau
amplitudo, panjang gelombang, fase gelombang dan polarisasi gelombang optik tersebut. Modulasi ini dapat terjadi di luar maupun di dalam serat optik.
Sampai saat ini ada 3 jenis fiber yang digunakan pada umumnya yaitu :
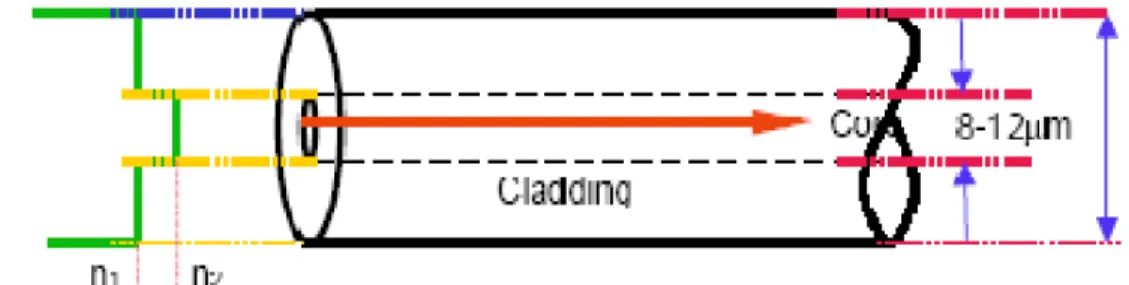
1. Single mode: serat optik dengan core yang sangat kecil, diameter mendekati panjang gelombang sehingga cahaya yang masuk ke dalamnya tidak terpantul-pantul ke dinding cladding. Berfungsi mengirim sinar laser inframerah (1300-1550 nanometer). Seperti yang terlihat pada gambar 2.4, core mempunyai diameter antara 8 sampai dengan 12 µm, dan cladding telah distandarisasi pada 125 µm. Readaman step index single mo de adalah 0,2 sampai 0,4 dB/Km, dan dengan bandwith 50 Ghz. Teknologi ini membutuhkan sumber cahaya dengan lebar spektral yang sangat kecil pula dan ini berarti sebuah sistem yang mahal. Singlemode dapat membawa 50 kali lebih jauh dibandingkan dengan serat optik multimode
Gambar 2.4. Single mode
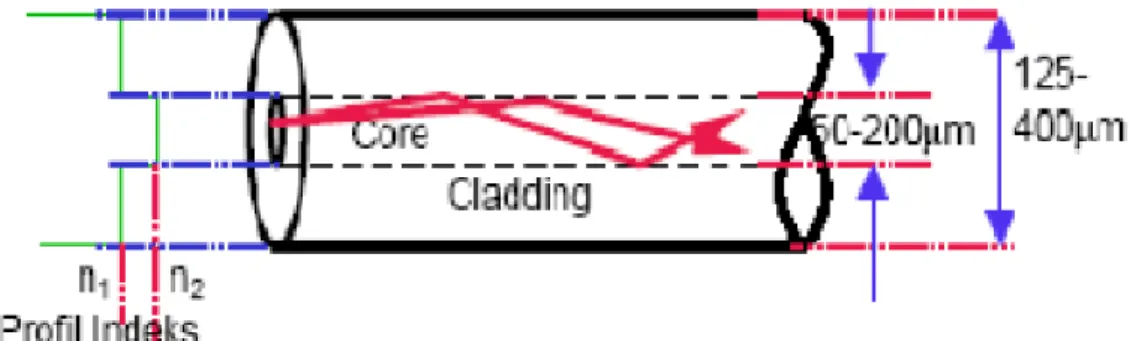
2. Multi mode step index: serat optik dengan diameter core yang agak besar yang membuat laser di dalamnya akan terpantul-pantul di dinding cladding yang dapat menyebabkan berkurangnya bandwidth dari serat optik jenis ini. Corenya mempunya diameter antara 50 sampai dengan 200 µm,
dimana cladding sangat tipis. Core dan cladding mempunyai index bias yang berbeda. Keuntungan dari serat step index multimode adalah corenya yang tebal sehingga mudah dalam penyambungan ujung dua serat optik dan dalam segi biaya lebih efektif. Biasanya
Ukuran NA yang terdapat didalam kabel Multi mode pada umumnya adalah berkisar antara 0,20 hingga 0,29. Kerugian utama dari serat ini adlah terjadinya tiga tipe dispersi dan adanya rugi-rugi daya yang besar.
Oleh karena itu, serat step index multimode digunakan untuk jarak yang pendek dengan bit rate yang relative rendah. Kabel ini cocok untuk transmisi medium. Redaman dari serat step index multimode anara 2 sampai dengan 30 dB/Km, dan bandwith antara 10 sampai dengan 100 Mhz. Panjang gelombang corenya sebesar 850-1300 nm.
Gambar 2.5. Multi mode step index
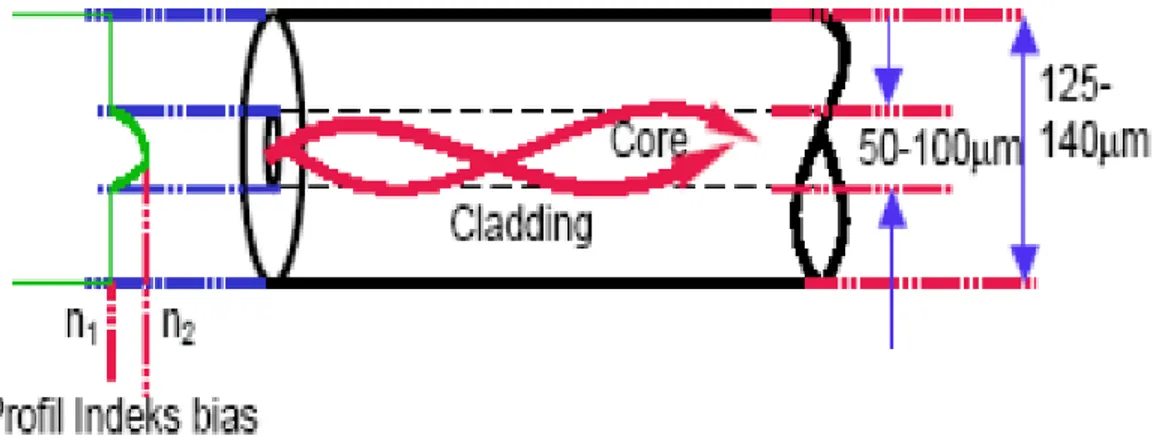
3. Multimode grade index: serat optik dengan diameter core yang besar dan mempunyai cladding yang bertingkat indeks biasnya sehingga dapat menambah bandwidth jika dibandingkan dengan Multimode step indek.
Kabel ini terdiri dari core yang mempunyai index bias berkurang sedikit demi sedikit dari pusat core sampai batas antara core dengan cladding. Core
tersebut terdiri dari lapisan—lapisan gelas, masing-masing lapisan mempunyai index bias yang berbeda. Umumnya diameter core 50µm dan untuk claddingnya 125µm seperti pada gambar 2.2.6. berkas cahaya yang merambat melalui kabel ini dibelokkan sampai propagasi sejajar dengan sumbu serat. Ditempat titik pantul tersebut propogasi diarahkan kearah axis serat. Propagasi gelombang cahaya melalui lapisan bagian luar berjalan lebih jauh dari pada berkas yang hanya melalui lapisan bagian dalam. Tetapi indeks bias dari lapisan luar adalah lebih kecil, berarti bahwa kecepatan propagsi cahaya bagian luar lebih cepat dari pada bagian dalam. Oleh karena itu, semua berkas cahaya (mode-mode) menggambarkan pulsa-pulsa yang datang pada waktu yang bersamaan. Dengan cara ini dispersi multipath dapat diusahakan seminim mungkin. Fiber grade index mempunyai redaman mulai dari 2 sampai dengan 10 dB/Km dan bandwith 1Ghz. Meskipun mempunyai banyak keuntungan, fiber ini sukar dalam pembuatannya dan harganya lenbih mahal dari pada step index multimode.
Gambar 2.6. Multimode Grade index
2.5. Konektor Serat Optik
Konektor fiber digunakan untuk menyambungkan dua ujung fiber optik, yang digunakan pada titik - titik di mana fiber berakhir pada pemancar dan penerima. Pada kabel serat optik, sambungan ujung terminal atau disebut juga konektor, biasanya memiliki tipe standar seperti berikut:
1. FC (Fiber Connector): digunakan untuk kabel single mode dengan akurasi yang sangat tinggi dalam menghubungkan kabel dengan transmitter maupun receiver.
Konektor ini menggunakan sistem drat ulir dengan posisi yang dapat diatur, sehingga ketika dipasangkan ke perangkat lain, akurasinya tidak akan mudah berubah.
2. SC (Subsciber Connector) : digunakan untuk kabel single mode, dengan sistem dicabut-pasang. Konektor ini tidak terlalu mahal, simpel, dan dapat diatur secara manual serta akurasinya baik bila dipasangkan ke perangkat lain.
3. ST (Straight Tip): bentuknya seperti bayonet berkunci hampir mirip dengan konektor BNC. Sangat umum digunakan baik untuk kabel multi mode maupun single mode. Sangat mudah digunakan baik dipasang maupun dicabut.
4. Biconic: Salah satu konektor yang kali pertama muncul dalam komunikasi fiber optik. Saat ini sangat jarang digunakan.
5. D4 konektor ini hampir mirip dengan FC hanya berbeda ukurannya saja.
Perbedaannya sekitar 2 mm pada bagian ferrule-nya.
6. SMA: konektor ini merupakan pendahulu dari konektor ST yang sama-sama menggunakan penutup dan pelindung. Namun seiring dengan berkembangnya ST konektor, maka konektor ini sudah tidak berkembang lagi penggunaannya.
7. E200
2.6. Optical Regenerator / Amplifier / Repeater
Optical regenerator atau dalam bahasa Indonesianya penguat sinyal cahaya, sebenarnya merupakan komponen yang tidak perlu ada ketika Anda menggunakan media fiber optik dalam jarak dekat saja.
Sinyal cahaya yang Anda kirimkan baru akan mengalami degradasi dalam jarak kurang lebih 1 km. Maka dari itu, jika Anda memang bermain dalam jarak jauh, komponen ini menjadi komponen utama juga. Biasanya optical generator disambungkan di tengah-tengah media fiber optik untuk lebih menguatkan sinyal- sinyal yang lemah.
2.7. Optical Receiver (Penerima)
Optical receiver memiliki tugas untuk menangkap semua cahaya yang dikirimkan oleh optical transmitter. Setelah cahaya ditangkap dari media fiber optic, maka sinyal ini akan didecode menjadi sinyal-sinyal digital yang tidak lain adalah informasi yang dikirimkan. Setelah di-decode, sinyal listrik digital tadi dikirimkan ke sistem pemrosesnya seperti misalnya ke televisi, ke perangkat komputer, ke telepon, dan banyak lagi perangkat digital lainnya. Biasanya optical receiver ini adalah berupa sensor cahaya seperti photocell atauphotodiode yang sangat peka dan sensitif terhadap perubahan cahaya.
2.8. LCD
LCD (liquid crystal display) merupakan suatu alat yang dapat menampilkan karakter ASCI sehingga kita bisa menampilkan campuran huruf dan angka sekaligus. LCD didalamnya terdapat sebuah mikroprosesor yang mengendalikan tampilan, kita hanya perlu membuat program untuk berkomunikasi.
Ukuran lcd ada berbagai macam seperti : a. lcd 16 x 2 ada 16 colom dan 2 baris
Perbedaanya terletak pada alamat menaruh karakter saja.
Karakter yang ditampilkan oleh LCD beraneka ragam tergangtung dari jenis lcd tersebut.
Command dan data dalam antarmuka lcd dengan mcs maka kita harus menembakan command yang berisi perintah dan data yaitu berupa text yang kita ingin tampilkan. Supaya lcd dapat menampilkan text maka yang perlu dilakukan adalah mengirimkan format hex data dalam bentuk asci, misal :
0 dengan mengirimkan 48 desimal A mengirimkan 65 desimal
Untuk mengunakan lcd untuk yang pertama, harus mengkonfigurasi lcd itu seperti keinginan kita. Konfigurasi berarti kita harus menambahkan command.
Gambar 2.7. LCD Pin – pin pada LCD, yaitu :
1. Ground 2. VCC
3. Contrast (buat konfigurasi pin 3 ->100ohm->pin b potensio 5K) 4. RS
5. RW 6. EN
7. D0 8. D1 9. D2 10. D3 11. D4 12. D5 13. D6 14. D7
15. Anoda (untuk backlight, lampu background) 16. Katoda
- RS
Pin ini memberi informasi apakah kirim data atau instruksi 0 = instruksi
1 = data - R/!W
0 = Write (tulis ke lcd) 1 = Read (baca dari lcd) - D0 -D7 = pin komunikasi
Anoda = supply VCC untuk background, beri 4.3 (serikan dari VCC ke LED baru masuk ke anoda).
katoda = berikan ground
kombinasi dari pin RS dan RW RS R/!W : Operation
0 0 IR Write Command
0 1 IR Read ………
1 0 DR write data 1 1 DR read ………
yang diperlukan untuk basic penulisan adalah write command dan write data.
Dibuat dengan assembly, kita buat dalam bentuk prosedure karena akan sering digunakan, kita define port dulu.
2.8.1 Register Pada LCD
Register yang terdapat di lcd adalah sebagai berikut : 1. IR (Intruction Register)
Digunakan untuk menentukan fungsi yang harus dikerjakan oleh LCD serta pengalamatan DDRAM atau CGRAM.
2. DR (Data Register)
Digunakan sebagai tempat data DDRAM atau CGRAM yang akan ditulis atau dibaca oleh komputer atau sistem minimum. Saat dibaca, DR menyimpan data DDRAM atau CGRAM, setelah itu data alamatnya secara otomatis masuk ke DR. Pada waktu menulis, cukup lakukan inisialisasi DDRAM atau CGRAM, kemudian untuk selanjutnya data dituliskan ke DDRAM atau CGRAM sejak awal alamat tersebut.
3. BF (Busy Flag)
Digunakan untuk bahwa LCD dalam keadaan siap atau sibuk. Apabila LCD sedang melakukan operasi internal, BF diset menjadi 1, sehingga tidak akan menerima perintah dari luar. Jadi, BF harus dicek apakah telah diriset menjadi 0 ketika akan menulis LCD (memberi data pada LCD). Cara untuk menulis LCD adalah dengan mengeset RS menjadi 0 dan mengeset R/W menjadi 1.
4. AC (Address Counter)
Digunakan untuk menunjukan alamat pada DDRAM atau CGRAM dibaca atau ditulis, maka AC secara otomatis menunjukan alamat berikutnya.
Alamat yang disimpan AC dapat dibaca bersamaan dengan BF.
5. DDRAM (Display Data Random Access Memory)
Digunakan sebagai tempat penyimpanan data yang sebesar 80 byte atau 80 karakter. AC menunjukan alamat karakter yang sedang ditampilkan.
6. CGROM (Character Generator Read Only Memory)
Pada LCD terdapat ROM untuk menyimpan karakter-karakter ASCII (American Standart Code for Interchage Intruction), sehingga cukup memasukan kode ASCII untuk menampilkanya.
7. CGRAM (Character Generator Random Access Memory)
Sebagai data storage untuk merancang karakter yang dikehendaki. Untuk CGRAM terdapat kode ASCII dari 00h sampai 0Fh, tetapi hanya 8 karakter yang disediakan. Alamat CGRAM hanya 6 bit, 3 bit untuk mengatur tinggi karakter dan 3 bit tinggi menjadi 3 bit rendah DDRAM yang menunjukan karakter, sedangkan 3 bit rendah sebagai posisi data CGRAM untuk membuat tampilan baris dalam dotmatriks 5x7 karakter tersebut, dimulai dari atas. Sehingga karakter untuk kode ASCII 00h sama dengan 09h sampai 07h dengan 0Fh. Dengan demikian untuk perancangan 1 karakter memerlukan penulisan data ke CGRAM samapai 8 kali.
8. Cursor and Blink Control circuit
Merupakan rangkaian yang menghasilkan tampilan kursor dan kondisi blink (berkedap-kedip).
Gambar 2.8. Tampilan LCD Character 16x2
Sebagai berikut adalah modul LCD 16x2 karakter yang akan digunakan dalam final project ini. Salah satu alasan mengapa modul LCD dipakai dalam proyek akhir ini adalah untuk menunjukkan angka pengukuran pada lux meter digital. Dengan mikrokontroler kita dapat mengendalikan suatu peralatan agar dapat bekerja secara otomatis. Untuk mengakses LCD 16x2 harus melakukan konfigurasi pin dari LCD dengan pin I/O mikrokontroler tersebut.
LCD (Liquid Crystal Display) Dot-Matrix HD44780 adalah salah satu jenis LCD dot-matrik dengan 2x16 karakter dan dikendalikan oleh kontroler hitachi HD44780. LCD (Liquid Crystal Display) Dot-Matrix HD44780 ini dapat menampilkan karakter angka numeric, huruf alphabet, huruf jepang dan simbol. Kedua komponen tersebut dikemas dalam suatu PCB sehingga membentuk satu modul yang dapat langsung digunakan.
Maka ini mempunyai delapan jalur data (DB0 s/d DB7) dan tiga jalur control (RS, R/W, E).
2.8.2. Konfigurasi Pin LCD
Konfigurasi Pin LCD Dot-Matrix HD44780 1. Pin 1 (Vss) sebagai jalur power supply ground (GND) 2. Pin 2 (Vcc) sebagai jalur power supply positif (+5V) 3. Pin 3 (Vee) merupakan kontrol kontras LCD
4. Pin 4 (RS) jalur instruksi pemilihan data atau perintah
5. Pin 5 (R/W) merupakan jalur instruksi read / write pada LCD 6. Pin 6 (E) jalur kontrol enable
7. LCD Pin7 – pin 14 (DB0 – DB7) adalah jalur data kontrol dan data karakter untuk LCD
Dari 14 pin yang dimiliki LCD (Liquid Crystal Display) Dot- Matrix HD44780, 8 pin diantaranya digunakan untuk menerima dan mengirimkan data dari dan ke LCD, yaitu pin DB0 – DB7. Sedangkan 3 pin lainya digunakan untuk kendali operasi.
Pin RS, digunakan oleh sistem prosesor HD44780 untuk meberi tahu LCD, apakan informasi biner yang diberikan pada DB0 – DB7 merupakan instruksi atau data.
1. Jika RS = Low, maka informasi biner pada DB0-DB7 adalah instruksi.
2. Jika RS = High, maka informasi biner pada DB0-DB7 adalah data.
Pin R/W, digunakan oleh sistem prosesor HD44780 untuk memberitahu LCD, apakah mikrokontroler akan mengirim data atau membaca data.
3. Jika R/W = Low, maka mengirim data 4. Jika R/W = High, maka membaca data
Pin E, digunakan oleh sistem prosesor HD44780 untuk memberitahu LCD agar mulai memproses sinyal yang diberikan oleh prosesor, yan ditandai dengan peralihan logika pin E dari Hogh ke Low. Khusus untuk pin DB7 selain sebagai data bus, pin ini juga dapat digunakan untuk memberitahukan sistem mikrokontroler bahwa LCD masih sibuk dan belum siap menerima data instruksi berikutnya.
2.8.3. Instruksi Dasar LCD
1. Display Clear, Instruksi ini digunakan untuk membersihkan tampian dan mengembalikan kursor keposisi awal.
2. Function set, digunakan untuk menentukan lebar interface (8-bit atau 4-bit) atau DL, jumlah jalur tampilan (N), dan bentuk aksara (F). Dalam tampilan LCD 4×20 ini lebar interface dapat ditentukan antara 8 bit dan 4 bit. Perbedaan interface 8 bit dan 4 bit adalah dari penggunaan jumlah dari jalur bus data dan pada metode penulisan dan pembacaan instruksi.
3. Entry Mode Set, Instruksi ini digunakan untuk menentukan arah dari perpindahan kursor (I/D) diberi nilai ―1‖ dan menentukan arah pergeseran tampilan (S) diberi nilai‖1‖. Operasi ini digunakan selama penulisan dan pembacaan data.
Display On/off Control, Instruksi ini digunakan untuk menghidupkan atau mematikan (on/off) display (D) diberi niai
―1‖, kursor © diberi nilai ―0‖.
2.9. Transformator
Transformer atau trafo adalah komponen elektromagnet yang dapat mengubah taraf suatu tegangan AC ke taraf yang lain. Adaptor AC-DC merupakan piranti yang menggunakan transformator step-down.
Transformator step-down
Gambar 2.9 Trafo
Transformator bekerja berdasarkan prinsip induksi elektromagnetik.
Tegangan masukan bolak-balik yang membentangi primer menimbulkan fluks magnet yang idealnya semua bersambung dengan lilitan sekunder. Fluks bolak- balik ini menginduksikan GGL dalam lilitan sekunder. Jika efisiensi sempurna, semua daya pada lilitan primer akan dilimpahkan ke lilitan sekunder.
Hubungan Primer-Sekunder
Gambar 2.10. Hubungan Primer – Sekunder Fluks pada transformator
Rumus untuk fluks magnet yang ditimbulkan lilitan primer adalah
...(2.1) dan rumus untuk GGL induksi yang terjadi di lilitan sekunder adalah
...(2.2)
Karena kedua kumparan dihubungkan dengan fluks yang sama, maka
...(2.3) dimana dengan menyusun ulang persamaan akan didapat
...(2.4) sedemikian hingga
...(2.5) Dengan kata lain, hubungan antara tegangan primer dengan tegangan sekunder ditentukan oleh perbandingan jumlah lilitan primer dengan lilitan sekunder.
transformator step-up transformator step-down Gambar 2.11. Lilitan Primer dan Skunder
2.10. Mikrokontroller Arduino Mega2560
Mikrokontroler adalah sebuah sistem komputer fungsional dalam sebuah chip. Di dalamnya terkandung sebuah inti prosesor, memori (sejumlah kecil RAM, memori program, atau keduanya), dan perlengkapan input output.
Dengan kata lain, mikrokontroler adalah suatu alat elektronika digital yang mempunyai masukan dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus dengan cara khusus, cara kerja mikrokontroler sebenarnya membaca dan menulis data. Mikrokontroler merupakan komputer didalam chip yang digunakan untuk mengontrol peralatan elektronik, yang menekankan efisiensi dan efektifitas biaya. Secara harfiahnya bisa disebut ―pengendali kecil‖ dimana sebuah sistem elektronik yang sebelumnya banyak memerlukan komponen-komponen pendukung seperti IC TTL dan CMOS dapat direduksi/diperkecil dan akhirnya terpusat serta dikendalikan oleh mikrokontroler ini. Arduino merupakan rangkaian elektronik yang bersifat open source, serta memiliki perangkat keras dan lunak yang mudah untuk digunakan. Arduino dapat mengenali lingkungan sekitarnya melalui berbagai jenis sensor dan dapat mengendalikan lampu, motor, dan berbagai jenis aktuator lainnya. Arduino mempunyai banyak jenis, di antaranya Arduino Uno, Arduino Mega 2560, Arduino Fio, dan lainnya.
2.10.1. Arduino Mega2560
Arduino Mega2560 adalah papan mikrokontroler berbasiskan ATmega2560. Arduino Mega2560 memiliki 54 pin digital input/output, dimana 15 pin dapat digunakan sebagai output PWM, 16 pin sebagai input analog, dan 4 pin sebagai UART (port serial hardware), 16 MHz kristal osilator, koneksi USB, jack power, header ICSP, dan tombol reset. Ini semua yang diperlukan untuk mendukung mikrokontroler. Cukup dengan menghubungkannya ke komputer melalui kabel USB atau power dihubungkan dengan adaptor AC-DC atau baterai untuk mulai mengaktifkannya. Arduino Mega2560 kompatibel dengan sebagian besar
shield yang dirancang untuk Arduino Duemilanove atau Arduino Diecimila. Arduino Mega2560 adalah versi terbaru yang menggantikan versi Arduino Mega. Arduino Mega2560 berbeda dari papan sebelumnya, karena versi terbaru sudah tidak menggunakan chip driver FTDI USB-to- serial. Tapi, menggunakan chip ATmega16U2 (ATmega8U2 pada papan Revisi 1 dan Revisi 2) yang diprogram sebagai konverter USB-to-serial.
Arduino Mega2560 Revisi 2 memiliki resistor penarik jalur HWB 8U2 ke Ground, sehingga lebih mudah untuk dimasukkan ke dalam mode DFU.
Arduino Mega2560 Revisi 3 memiliki fitur-fitur baru berikut:
1. Pinout ditambahkan pin SDA dan pin SCL yang dekat dengan pin AREF dan dua pin baru lainnya ditempatkan dekat dengan pin RESET, IOREF memungkinkan shield untuk beradaptasi dengan tegangan yang tersedia pada papan. Di masa depan, shield akan kompatibel baik dengan papan yang menggunakan AVR yang beroperasi dengan 5 Volt dan dengan Arduino Due yang beroperasi dengan tegangan 3.3 Volt. Dan ada dua pin yang tidak terhubung, yang disediakan untuk tujuan masa depan.
2. Sirkuit RESET.
3. Chip ATmega16U2 menggantikan chip ATmega8U2.
Gambar 2.12. Arduino Mega2560
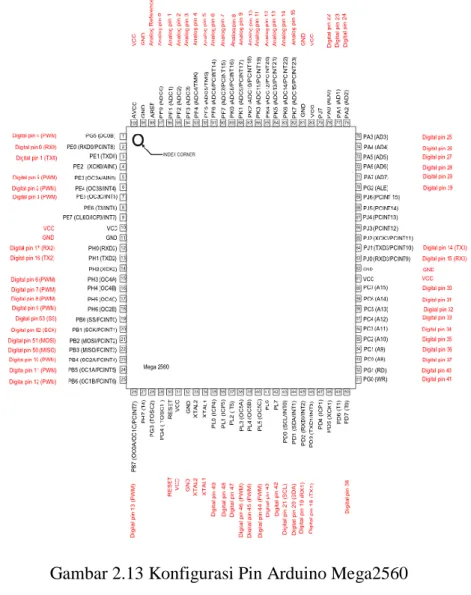
2.10.2. Pemetaan Pin
Gambar 2.13 Konfigurasi Pin Arduino Mega2560
Tabel 2.1. Daftar Pin Arduino Mega2560
Nomor Pin Nama Pin Peta Nama Pin
1 PG5 (OC0B) Digital pin 4 (PWM)
2 PE0 (RXD0/PCINT8) Digital pin 0 (RX0)
3 PE1 (TXD0) Digital pin 1 (TX0)
4 PE2 (XCK0/AIN0)
5 PE3 (OC3A/AIN1) Digital pin 5 (PWM)
6 PE4 (OC3B/INT4) Digital pin 2 (PWM)
7 PE5 (OC3C/INT5) Digital pin 3 (PWM)
8 PE6 (T3/INT6)
9 PE7 (CLKO/ICP3/INT7)
10 VCC VCC
11 GND GND
12 PH0 (RXD2) Digital pin 17 (RX2)
13 PH1 (TXD2) Digital pin 16 (TX2)
14 PH2 (XCK2)
15 PH3 (OC4A) Digital pin 6 (PWM)
16 PH4 (OC4B) Digital pin 7 (PWM)
17 PH5 (OC4C) Digital pin 8 (PWM)
18 PH6 (OC2B) Digital pin 9 (PWM)
19 PB0 (SS/PCINT0) Digital pin 53 (SS)
20 PB1 (SCK/PCINT1) Digital pin 52 (SCK)
21 PB2 (MOSI/PCINT2) Digital pin 51 (MOSI)
22 PB3 (MISO/PCINT3) Digital pin 50 (MISO)
23 PB4 (OC2A/PCINT4) Digital pin 10 (PWM)
24 PB5 (OC1A/PCINT5) Digital pin 11 (PWM)
25 PB6 (OC1B/PCINT6) Digital pin 12 (PWM)
26 PB7 (OC0A/OC1C/PCINT7) Digital pin 13 (PWM)
27 PH7 (T4 )
28 PG3 (TOSC2)
29 PG4 (TOSC1)
30 RESET RESET
31 VCC VCC
32 GND GND
33 XTAL2 XTAL2
34 XTAL1 XTAL1
35 PL0 (ICP4) Digital pin 49
36 PL1 (ICP5) Digital pin 48
37 PL2 (T5 ) Digital pin 47
38 PL3 (OC5A) Digital pin (PWM)
39 PL4 (OC5B) Digital pin 45 (PWM)
40 PL5 (OC5C) Digital pin 44 (PWM)
41 PL6 Digital pin 43
42 PL7 Digital pin 42
43 PD0 (SCL/INT0) Digital pin 21 (SCL)
44 PD1 (SDA/INT1) Digital pin 20 (SDA)
45 PD2 (RXDI/INT2) Digital pin 19 (RX1)
69 PJ6 (PCINT 15)
70 PG2 (ALE) Digital pin 39
71 PA7 (AD7) Digital pin 29
72 PA6 (AD6) Digital pin 28
73 PA5 (AD5) Digital pin 27
74 PA4 (AD4) Digital pin 26
75 PA3 (AD3) Digital pin 25
76 PA2 (AD2) Digital pin 24
77 PA1 (AD1) Digital pin 23
78 PA0 (AD0) Digital pin 22
79 PJ7
80 VCC VCC
81 GND GND
82 PK7 (ADC15/PCINT23) Analog pin 15
83 PK6 (ADC14/PCINT22) Analog pin 14
84 PK5 (ADC13/PCINT21) Analog pin 13
85 PK4 (ADC12/PCINT20) Analog pin 12
86 PK3 (ADC11/PCINT19) Analog pin 11
87 PK2 (ADC10/PCINT18) Analog pin 10
88 PK1 (ADC9/PCINT17) Analog pin 9
89 PK0 (ADC8/PCINT16) Analog pin 8
90 PF7 (ADC7) Analog pin 7
91 PF6 (ADC6) Analog pin 6
92 PF5 (ADC5/TMS) Analog pin 5
93 PF4 (ADC4/TMK) Analog pin 4
94 PF3 (ADC3) Analog pin 3
95 PF2 (ADC2) Analog pin 2
96 PF1 (ADC1) Analog pin 1
Tabel 2.2. Spesifikasi Arduino Mega2560
Mikrokontroler ATmega2560
Tegangan Operasi 5V
Input Voltage (disarankan) 7-12V
Mikrokontroler AT Mega2560
Input Voltage (limit) 6-20V
Pin Digital I/O 54 (yang 15 pin digunakan sebagai output PWM)
Pins Input Analog 16
Arus DC per pin I/O 40 mA
Arus DC untuk pin 3.3V 50 mA
Flash Memory 256 KB (8 KB digunakan untuk bootloader)
SRAM 8 KB
EEPROM 4 KB
Clock Speed 16 Hz
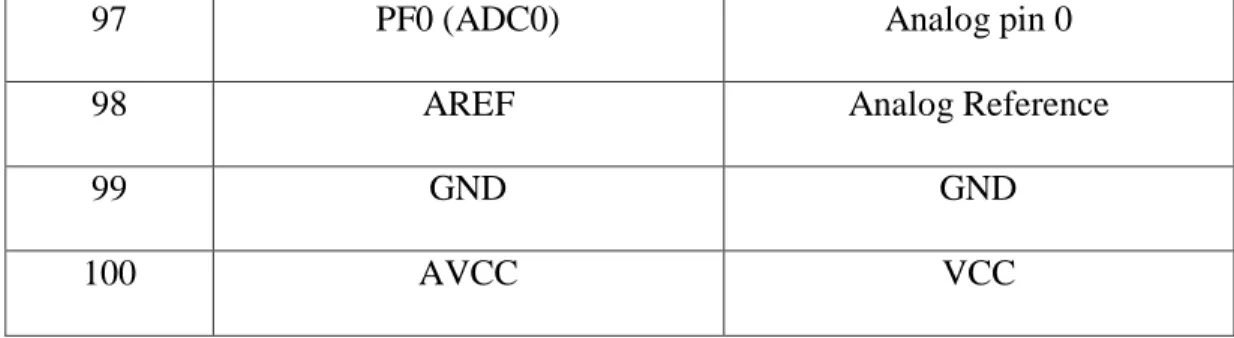
97 PF0 (ADC0) Analog pin 0
98 AREF Analog Reference
99 GND GND
100 AVCC VCC
2.10.3 Sumber Daya
Arduino Mega dapat diaktifkan melalui koneksi USB atau dengan catu daya eksternal. Sumber daya dipilih secara otomatis. Sumber daya eksternal (non-USB) dapat berasal baik dari adaptor AC-DC atau baterai.
Adaptor dapat dihubungkan dengan mencolokkan steker 2,1 mm yang bagian tengahnya terminal positif ke ke jack sumber tegangan pada papan.
Jika tegangan berasal dari baterai dapat langsung dihubungkan melalui header pin Gnd dan pin Vin dari konektor POWER.
Papan Arduino ATmega 2560 dapat beroperasi dengan pasokan daya eksternal 6 Volt sampai 20 volt. Jika diberi tegangan kurang dari 7 Volt, maka, pin 5 Volt mungkin akan menghasilkan tegangan kurang dari 5 Volt dan ini akan membuat papan menjadi tidak stabil. Jika sumber tegangan menggunakan lebih dari 12 Volt, regulator tegangan akan mengalami panas berlebihan dan bisa merusak papan. Rentang sumber tegangan yang dianjurkan adalah 7 Volt sampai 12 Volt.
Pin tegangan yang tersedia pada papan Arduino adalah sebagai berikut:
1. VIN : Adalah input tegangan untuk papan Arduino ketika menggunakan sumber daya eksternal (sebagai ‗saingan‘ tegangan 5 Volt dari koneksi USB atau sumber daya ter-regulator lainnya). Anda dapat memberikan tegangan melalui pin ini, atau jika memasok tegangan untuk papan melalui jack power, kita bisa mengakses/mengambil tegangan melalui pin ini.
2. 5V : Sebuah pin yang mengeluarkan tegangan ter-regulator 5 Volt, dari pin ini tegangan sudah diatur (ter-regulator) dari regulator yang tersedia (built- in) pada papan. Arduino dapat diaktifkan dengan sumber daya baik berasal
dari jack power DC (7-12 Volt), konektor USB (5 Volt), atau pin VIN pada board (7-12 Volt). Memberikan tegangan melalui pin 5V atau 3.3V secara langsung tanpa melewati regulator dapat merusak papan Arduino.
3. 3V : Sebuah pin yang menghasilkan tegangan 3,3 Volt. Tegangan ini dihasilkan oleh regulator yang terdapat pada papan (on-board). Arus maksimum yang dihasilkan adalah 50 mA.
4. GND : Pin Ground atau Massa
5. IOREF : Pin ini pada papan Arduino berfungsi untuk memberikan referensi tegangan yang beroperasi pada mikrokontroler. Sebuah perisai (shield) dikonfigurasi dengan benar untuk dapat membaca pin tegangan IOREF dan memilih sumber daya yang tepat atau mengaktifkan penerjemah tegangan (voltage translator) pada output untuk bekerja pada tegangan 5 Volt atau 3,3 Volt.
2.10.4. Memori
Arduino ATmega2560 memiliki 256 KB flash memory untuk menyimpan kode (yang 8 KB digunakan untuk bootloader), 8 KB SRAM dan 4 KB EEPROM (yang dapat dibaca dan ditulis dengan perpustakaan EEPROM).
2.10.5. Input dan Output
Masing-masing dari 54 digital pin pada Arduino Mega dapat digunakan sebagai input atau output, menggunakan fungsi pinMode() , digitalWrite() , dan digitalRead(). Arduino Mega beroperasi pada tegangan 5 volt. Setiap pin dapat memberikan atau menerima arus maksimum 40 mA dan memiliki resistor pull-up internal (yang terputus secara default) sebesar 20-50 kOhms. Selain itu, beberapa pin memiliki fungsi khusus, antara lain:
1. Serial : 0 (RX) dan 1 (TX); Serial 1 : 19 (RX) dan 18 (TX); Serial 2 : 17 (RX) dan 16 (TX); Serial 3 : 15 (RX) dan 14 (TX). Digunakan untuk menerima (RX) dan mengirimkan (TX) data serial TTL. Pins 0 dan 1 juga terhubung ke pin chip ATmega16U2 Serial USB-to-TTL.
2. Eksternal Interupsi : Pin 2 (interrupt 0), pin 3 (interrupt 1), pin 18 (interrupt 5), pin 19 (interrupt 4), pin 20 (interrupt 3), dan pin 21 (interrupt 2). Pin ini dapat dikonfigurasi untuk memicu sebuah interupsi pada nilai yang rendah, meningkat atau menurun, atau perubah nilai.
3. SPI : Pin 50 (MISO), pin 51 (MOSI), pin 52 (SCK), pin 53 (SS). Pin ini mendukung komunikasi SPI menggunakan perpustakaan SPI. Pin SPI juga terhubung dengan header ICSP, yang secara fisik kompatibel dengan Arduino Uno, Arduino Duemilanove dan Arduino Diecimila.
4. LED : Pin 13. Tersedia secara built-in pada papan Arduino ATmega2560. LED terhubung ke pin digital 13. Ketika pin diset bernilai HIGH, maka LED menyala (ON), dan ketika pin diset bernilai LOW, maka LED padam (OFF).
5. TWI : Pin 20 (SDA) dan pin 21 (SCL). Yang mendukung komunikasi TWI menggunakan perpustakaan Wire. Perhatikan bahwa pin ini tidak di lokasi yang sama dengan pin TWI pada Arduino Duemilanove atau Arduino Diecimila.
Arduino Mega 2560 memiliki 16 pin sebagai analog input, yang masing-masing menyediakan resolusi 10 bit (yaitu 1024 nilai yang berbeda).
Secara default pin ini dapat diukur/diatur dari mulai Ground sampai dengan
5 Volt, juga memungkinkan untuk mengubah titik jangkauan tertinggi atau terendah mereka menggunakan pin AREF dan fungsi analogReference().
Ada beberapa pin lainnya yang tersedia, antara lain:
1. AREF : Referensi tegangan untuk input analog. Digunakan dengan fungsi analogReference().
2. RESET : Jalur LOW ini digunakan untuk me-reset (menghidupkan ulang) mikrokontroler. Jalur ini biasanya digunakan untuk menambahkan tombol reset pada shield yang menghalangi papan utama Arduino.
2.10.6. Komunikasi
Arduino Mega2560 memiliki sejumlah fasilitas untuk berkomunikasi dengan komputer, dengan Arduino lain, atau dengan mikrokontroler lainnya. Arduino ATmega328 menyediakan 4 hardware komunikasi serial UART TTL (5 Volt). Sebuah chip ATmega16U2 (ATmega8U2 pada papan Revisi 1 dan Revisi 2) yang terdapat pada papan digunakan sebagai media komunikasi serial melalui USB dan muncul sebagai COM Port Virtual (pada Device komputer) untuk berkomunikasi dengan perangkat lunak pada komputer, untuk sistem operasi Windows masih tetap memerlukan file inf,tetapi untuk sistem operasi OS X dan Linux akan mengenali papan sebagai port COM secara otomatis. Perangkat lunak Arduino termasuk didalamnya serial monitor memungkinkan data tekstual sederhana dikirim ke dan dari papan Arduino.
2.10.7 Software Arduino
Arduino Mega2560 dapat diprogram dengan perangkat lunak Arduino. IDE Arduino adalah software yang sangat canggih ditulis dengan menggunakan Java. IDE Arduino terdiri dari :
1. Editor program, sebuah window yang memungkinkan pengguna menulis dan mengeditprogram dalam bahasa Processing.
2. Compiler, sebuah modul yang mengubah kode program (bahasa Processing) menjadi kode biner. Bagaimanapun sebuah mikrokontroler tidak akan bisa memahami bahasa Processing. Yang bisa dipahami oleh mikrokontroler adalah kode biner. Itulah sebabnya compiler diperlukan dalam hal ini.
3. Uploader, sebuah modul yang memuat kode biner dari komputer ke dalam memory didalam papan Arduino.
Sebuah kode program Arduino umumnya disebut dengan istilah sketch.
Kata―sketch‖ digunakan secara bergantian dengan ―kode program‖ dimana keduanya memiliki arti yang sama.
Gambar 2.14. Tampilan Arduino IDE
2.10.8 Bahasa Pemograman Arduino Berbasis Bahasa C
Seperti yang telah dijelaskan diatas program Arduino sendiri menggunakan bahasa C. walaupun banyak sekali terdapat bahasa pemrograman tingkat tinggi (high level language) seperti pascal, basic, cobol, dan lainnya. Walaupun demikian, sebagian besar dari paraprogramer profesional masih tetap memilih bahasa C sebagai bahasa yang lebih unggul, berikut alasan-alasannya:
1. Bahasa C merupakan bahasa yang powerful dan fleksibel yang telah terbukti dapat menyelesaikan program-program besar seperti pembuatan sistem operasi, pengolah gambar (seperti pembuatan game) dan juga pembuatan kompilator bahasa pemrograman baru.
2. Bahasa C merupakan bahasa yang portabel sehingga dapat dijalankan di beberapa sistem operasi yang berbeda. Sebagai contoh program yang kita tulis dalam sistem operasi windows dapat kita kompilasi didalam sistem operasi linux dengan sedikit ataupun tanpa perubahan sama sekali.
3. Bahasa C merupakan bahasa yang sangat populer dan banyak digunakan oleh programer berpengalaman sehingga kemungkinan besar library pemrograman telah banyak disediakan oelh pihak luar/lain dan dapat diperoleh dengan mudah.
4. Bahasa C merupakan bahasa yang bersifat modular, yaitu tersusun atas rutin-rutin tertentu yang dinamakan dengan fungsi (function) dan fungsi- fungsi tersebut dapat digunakan kembali untuk pembuatan program- program lainnya tanpa harus menulis ulang implementasinya.
5. Bahasa C merupakan bahasa tingkat menengah (middle level language) sehingga mudah untuk melakukan interface (pembuatan program antar muka) ke perangkat keras.
6. Struktur penulisan program dalam bahasa C harus memiliki fungsi utama, yang bernama main(). Fungsi inilah yang akan dipanggil pertama kali pada saat proses eksekusi program. Artinya apabila kita mempunyai fungsi lain selain fungsi utama, maka fungsi lain tersebut baru akan dipanggil pada saat digunakan.
Oleh karena itu bahasa C merupakan bahasa prosedural yang menerapakan konsep runtutan (program dieksekusi per baris dari atas ke bawah secara berurutan), maka apabila kita menuliskan fungsi-fungsi lain tersebut dibawah fungsi utama, maka kita harus menuliskan bagian prototipe (prototype), hal ini dimaksudkan untuk mengenalkan terlebih dahulu kepada kompiler daftar fungsi yang akan digunakan di dalam program. Namun apabila kita menuliskan fungsi-fungsi lain tersebut diatas atau sebelum fungsi utama, maka kita tidak perlu lagi untuk menuliskan bagian prototipe diatas.
Selain itu juga dalam bahasa C kita akan mengenal file header, biasa ditulis dengan ekstensi h(*.h), adalah file bantuan yang yang digunakan untuk menyimpan daftar-daftar fungsi yang akan digunakan dalam program.
Bagi anda yang sebelumnya pernah mempelajari bahasa pascal, file header ini serupa dengan unit. Dalam bahasa C, file header standar yang untuk proses input/output adalah <stdio.h>. Perlu sekali untuk diperhatikan bahwa apabila kita menggunakan file header yang telah disediakan oleh
kompilator, maka kita harus menuliskannya didalam tanda‗<‘ dan ‗>‘
(misalnya <stdio.h>).
Namun apabila menggunakan file header yang kita buat sendiri, maka file tersebut ditulis diantara tanda ― dan ‖ (misalnya ―cobaheader.h‖).
perbedaan antara keduanya terletakpada saat pencerian file tersebut. Apabila kita menggunakan tanda <>, maka file tersebut dianggap berada pada direktori deafault yang telah ditentukan oleh kompilator. Sedangkan apabila kita menggunakan tanda ―‖, maka file header dapat kita dapat tentukan sendiri lokasinya.
File header yang akan kita gunakan harus kita daftarkan dengan menggunakan directive #include. Directive #include ini berfungsi untuk memberi tahu kepada kompilator bahwa program yang kita buat akan menggunakan file-file yang didaftarkan. Berikut ini contoh penggunaan directive #include.
#include<stdio.h>
#include<stdlib.h>
#include”myheader.h”
Setiap kita akan menggunakan fungsi tertentu yang disimpan dalam sebuah file header, maka kita juga harus mendaftarkan file headernya dengan menggunakan directive #include. Sebagai contoh, kita akan menggunakan fungsi getch() dalam program, maka kita harus mendaftarkan file header<conio.h>.