6
BAB II
LANDASAN TEORI
Pada bab ini akan dibahas mengenai teori – teori yang mendasari perancangan dan perealisasian alat ukur daya listrik dan faktor daya.
2.1. Alternating Current (AC)
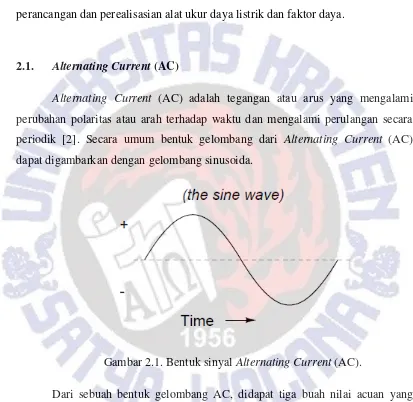
Alternating Current (AC) adalah tegangan atau arus yang mengalami perubahan polaritas atau arah terhadap waktu dan mengalami perulangan secara periodik [2]. Secara umum bentuk gelombang dari Alternating Current (AC) dapat digambarkan dengan gelombang sinusoida.
Gambar 2.1. Bentuk sinyal Alternating Current (AC).
Dari sebuah bentuk gelombang AC, didapat tiga buah nilai acuan yang menentukan besarnya tegangan atau arus, yaitu nilai puncak (peak), nilai rata-rata (average), dan nilai efektif (rms).
1. Nilai puncak (peak)
7
Gambar 2.2. Nilai puncak gelombang. 2. Nilai rata-rata (average)
Nilai rata-rata (averege) sebuah fungsi periodik adalah integral fungsi waktu terhadap keseluruhan periode dibagi dengan selang waktu periodenya [3]. Untuk menghitung nilai rata-rata suatu fungsi periodik bisa digunakan rumusan umum berikut
dimana, Yav = nilai rata-rata (averege)
y(t) = fungsi gelombang periodik T = periode (s)
3. Nilai efektif (rms)
Nilai efektif (rms) adalah suatu nilai yang digunakan untuk menunjukkan besar tegangan atau arus AC yang setara dengan besar tegangan atau arus DC menghasilkan kalor ketika melalui penghantar dalam rentang waktu yang sama [2]. Nilai efektif dapat dihitung dengan rumusan umum berikut
8 dimana, Yrms = nilai efektif (rms)
y(t) = fungsi gelombang periodik T = periode (s)
2.1.1. Beban Pada Gelombang AC
Dalam dunia elektronika terdapat tiga buah jenis sifat beban, yaitu resistif, induktif, dan kapasitif. Setiap jenis beban memiliki karakteristik yang berbeda-beda ketika terpengaruh oleh gelombang AC. Pengaruh gelombang AC dapat dijelaskan sebagai berikut
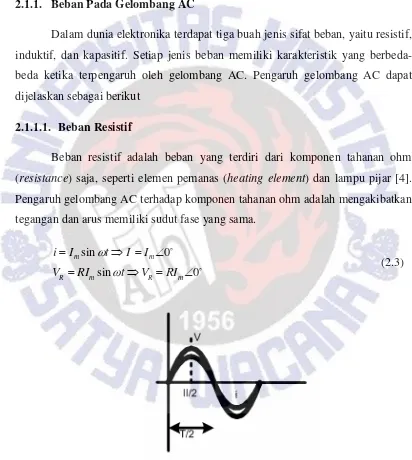
2.1.1.1. Beban Resistif
Beban resistif adalah beban yang terdiri dari komponen tahanan ohm (resistance) saja, seperti elemen pemanas (heating element) dan lampu pijar [4]. Pengaruh gelombang AC terhadap komponen tahanan ohm adalah mengakibatkan tegangan dan arus memiliki sudut fase yang sama.
sin 0
sin 0
m m
R m R m
i I t I I
V RI t V RI
(2.3)
9 2.1.1.2. Beban Induktif
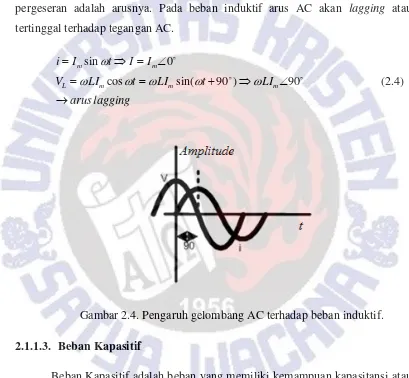
Beban induktif adalah beban yang terdiri dari kumparan kawat yang dililitkan pada sebuah inti, seperti coil, transformator, dan solenoid [4]. Jika dikenai gelombang AC, beban yang memiliki sifat induktif akan mengalami pergeseran sudut fase (phase shift). Biasanya komponen AC yang mengalami pergeseran adalah arusnya. Pada beban induktif arus AC akan lagging atau tertinggal terhadap tegangan AC.
sin 0
Gambar 2.4. Pengaruh gelombang AC terhadap beban induktif. 2.1.1.3. Beban Kapasitif
10
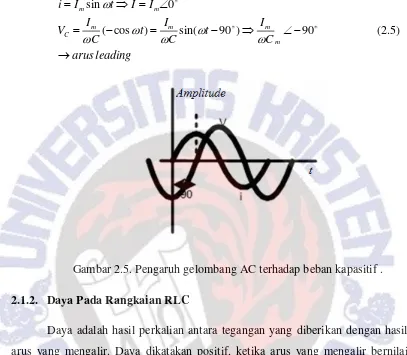
Gambar 2.5. Pengaruh gelombang AC terhadap beban kapasitif . 2.1.2. Daya Pada Rangkaian RLC
Daya adalah hasil perkalian antara tegangan yang diberikan dengan hasil arus yang mengalir. Daya dikatakan positif, ketika arus yang mengalir bernilai positif artinya arus mengalir dari sumber tegangan menuju rangkaian. Sedangkan daya dikatakan negatif ketika arus yang mengalir bernilai negatif artinya arus mengalir dari rangkaian menuju sumber tegangan [3].
Dalam rangkaian RLC, terdapat beberapa jenis daya, yaitu daya sesaat, daya rata-rata, dan daya kompleks.
2.1.2.1. Daya Sesaat
Daya sesaat adalah daya yang terjadi pada saat tertentu ketika sebuah komponen mempunyai nilai tegangan dan arus yang mengalir hanya saat waktu tersebut. Daya sesaat dapat dirumuskan sebagai berikut
( ) ( ). ( )
11 dimana, P(t) = daya sesaat (watt)
v(t) = tegangan pada saat t (volt) i(t) = arus pada saat t (ampere) 2.1.2.2. Daya Rata-Rata
Daya rata-rata adalah daya yang dihasilkan sebagai integral dari fungsi periodik waktu terhadap keseluruhan range waktu tertentu dibagi periodenya sendiri [3]. Dengan menggunakan persamaan (2.1) sebagai acuan, dapat diketahui daya rata-rata pada setiap komponen pasif.
Daya rata-rata pada komponen induktor (L) dengan ( )V t Vmsint, maka akan didapatkan arus yang mengalir pada komponen induktor adalah
1 1
maka didapatkan nilai dari i(t)adalah
( ) sin( )
2 m
i t I t (2.8)
sehingga dengan persamaan (2.6) didapatkan daya sesaat pada komponen L
12
Gambar 2.6. Hubungan daya sesaat, tegangan, dan arus pada komponen induktor (L).
Ketika tegangan dan arus positif maka dayanya positif dapat diartikan energi mengalir dari sumber ke induktor, demikian juga ketika tegangan dan arus negatif. Akan tetapi ketika tegangan dan arus berlawanan tanda maka dayanya negatif artinya energi mengalir dari induktor ke sumber tegangan, sehingga dapat dicari daya rata-rata pada komponen induktor adalah
2 2
13 dituliskan dalam persamaan berikut
1
Untuk menghindarkan daya rata-rata pada komponen induktor dan kapasitor sama dengan nol, dapat diambil rumus umum, dimana
( ) sin
dengan nilai tergantung dari komponen induktor atau kapasitor yang terpasang. Jika induktor bertanda ‘+’ dan kapasitor akan memiliki tanda ‘-’, sehingga
( ) ( ). ( ) sin . sin( ) persamaan daya rata-rata umum untuk beban induktor dan kapasitor
14 2.1.2.3. Daya Kompleks
Daya rata-rata sebenarnya adalah daya yang dipakai oleh komponen pasif resistor yang merupakan daya yang terpakai atau terserap [3]. Jika dalam penerapan nyata, daya rata-rata inilah yang akan ditagihkan kepada pelanggan dari PLN. Daya rata-rata memiliki simbol P dan memiliki satuan watt. Secara matematis, daya rata-rata atau daya aktif adalah hasil perkalian antara tegangan efektif, arus efektif, dan koefisien faktor dayanya.
cos eff eff
PV I (2.16)
Daya reaktif adalah daya yang muncul karena adanya komponen pasif selain resistor yang terpasang, bisa kapasitor maupun induktor [2]. Daya ini seminimal mungkin dihindari atau setidaknya diperkecil karena daya reaktif merupakan daya rugi-rugi. Daya reaktif disimbolkan Q dan memiliki satuan volt.ampere.reaktif (VAR). Secara matematis, daya reaktif adalah hasil perkalian antara tegangan efektif, arus efektif dan nilai sin θ.
sin perkalian antara tegangan efektif dan arus efetifnya.
eff eff
S V I (2.18)
Daya tampak atau daya nyata biasa juga disebut dengan daya kompleks, yaitu gabungan antara daya rata-rata dan daya reaktif. Daya kompleks memiliki dua buah bagian, yaitu bagian nyata dan nilai imajinernya seperti berikut
cos sin
eff eff eff eff eff eff
15 2.1.3. Faktor Daya
Faktor daya atau power factor (pf) adalah perbandingan antara daya rata-rata atau daya aktif terhadap daya tampak. Secara matematis, faktor daya dapat ditulis dalam persamaan berikut
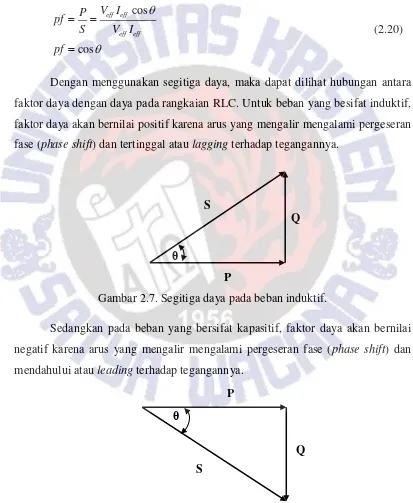
cos
Dengan menggunakan segitiga daya, maka dapat dilihat hubungan antara faktor daya dengan daya pada rangkaian RLC. Untuk beban yang besifat induktif, faktor daya akan bernilai positif karena arus yang mengalir mengalami pergeseran fase (phase shift) dan tertinggal atau lagging terhadap tegangannya.
Gambar 2.7. Segitiga daya pada beban induktif.
Sedangkan pada beban yang bersifat kapasitif, faktor daya akan bernilai negatif karena arus yang mengalir mengalami pergeseran fase (phase shift) dan mendahului atau leading terhadap tegangannya.
16 2.2. Sensor Arus ACS712
Pengukuran Arus membutuhkan sebuah resistor shunt yaitu resistor yang dihubungkan secara seri dengan beban dan akan menghasilkan tegangan. Tegangan tersebut biasanya diumpankan ke current transformator terlebih dahulu sebelum masuk ke rangkaian pengkondisi sinyal. Dengan teknologi hall effect yang diterapkan oleh Allegro MicroSystem, Inc, fungsi dari resistor shut dan current transformator dapat digantikan dengan oleh sebuah sensor yang memiliki ukuran relatif lebih kecil.
ACS712 adalah suatu sensor arus yang menerapkan teknologi hall effect untuk mendeteksi perubahan arus yang mengalir dan mengubahnya dalam bentuk tegangan yang proporsional terhadap perubahan arus. AC712 dapat digunakan untuk pegukuran arus bolak-balik (AC) maupun arus searah (DC). Sensor ini biasa diterapkan oleh industri, otomotif, komersil, dan sistem komunikasi. Pada umumnya aplikasi dari sensor ini digunakan untuk mengontrol motor deteksi beban listrik, switched-mode power supply, dan proteksi beban berlebih [4].
Gambar 2.3. Sensor arus ACS712.
17
menjadi tegangan yang proporsional terhadap arusnya. Tegangan keluaran yang dihasilkan oleh sensor selalu bernilai positif karena dipengaruhi oleh rangkaian low-offset yang terdapat didalamnya. Perubahan besar tegangan keluaran sensor ACS712 linear terhadap arus yang mengalir.
Gambar 2.4. Perbandingan tegangan keluaran dengan arus input [5]. Sensor arus ACS712 memiliki beberapa fasilitas dan keunggulan dibandingkan dengan sensor arus jenis lainnya, diantaranya sebagai berikut:
Sinyal pengganggu (noise) pada rangkaian rendah.
Bandwidth dapat diatur dengan menggunakan pin FILTER. Waktu tanggapan keluaran cepat terhadap input, 5 us. Bandwidth yang tersedia cukup lebar, 80 kHz.
Hambatan dalam 1,2 mΩ.
Operasi catu daya tunggal sebesar 5 VDC.
Sensitivitas keluaran dari 66 mV – 185 mV tiap ampere. Dapat digunakan untuk pengukuran arus AC maupun DC. Memiliki offset tegangan yang stabil.
18
Gambar 2.5. Konfigurasi pin sensor arus ACS712 [5]
Tabel 2.1. Tabel deskripsi masing-masing pin sensor arus ACS712 [5].
Nomor pin Nama pin Keterangan
1 dan 2 IP+ Terminal untuk arus yang diukur
3 dan 4 IP- Terminal untuk arus yang diukur
5 GND Terminal ground
6 FILTER
Terminal untuk kapasitor eksternal sebagai pengatur bandwidth
7 VIOUT Analog output
8 VCC Supply tegangan
2.3. Mikrokontroler AVR
19
akan memiliki kecepatan eksekusi program dua belas kali lebih cepat dibandingkan eksekusi program mikrokontroler keluarga MCS-51
Semua jenis AVR telah dilengkapi dengan memori flash sebagai memori program. Kapasitas memori flash yang dimiliki bervariasi dari 1KB sampai 128KB. Secara teknis memori jenis ini dapat diprogram melalui saluran antarmuka yang dikenal dengan nama Serial Peripheral Interface (SPI). Dari segi fitur dan fasilitas yang ditawarkan, mikrokontroler keluarga AVR memiliki fitur yang melimpah. Fitur tersebut diantaranya adalah mikrokontroler keluarga AVR sudah dilengkapi dengan ADC internal, memori program dan memori data relative lebih besar, rangkaian komparator internal, PWM internal, bahkan mikrokontroler AVR sangat kompatibel dengan pemrograman bahasa C.
Mikrokontroler keluarga AVR terbagi dalam 4 sub bagian, yaitu ATtiny, ATmega, AT90Sxx, dan AVR fungsi khusus. Pembagian ini ditujukan agar pemakaian mikrokontroler labih maksimal. Misal, penggunaan mikrokontroler ATtiny untuk aplikasi sederhana dan relatif lebih kecil, sedangkan ATmega digunakan untuk aplikasi yang lebih rumit dan relatif menggunakan alokasi memori yang lebih besar.
2.3.1. Mikrokontroler ATMega32
Mikrokontroler ATMega32 adalah sebuah chip mikrokontroler keluarga AVR. Mikrokontroler jenis ini memiliki frekuensi kerja yang sama dengan frekuensi osilatornya dan cukup tinggi, yaitu maksimal 16MHz. Ukuran flash memori cukup besar, kapasitas SRAM sebesar 2 KB, dan 32 buah port input/output yang sangat memadai untuk berinteraksi dengan perangkat lainnya. Berikut adalah fasilitas dari mikrokontroler ATMega32[7].
Saluran I/O sebanyak 32 buah yang terbagi dalam 4 port yaitu port A, port B, port C, dan port D.
ADC 10 bit sebanyak 8 saluran.
20 CPU yang terdiri dari 32 register.
Watchdog timer dengan osilator internal. SRAm sebesar 2 KB.
Memori flash sebesar 32 KB dengan kemampuan read while write. Unit interupsi internal dan external.
Port antarmuka SPI.
EEPROM sebesar 1KB yang dapat diprogram saat operasi. Port USART untuk komunikasi serial
Berikut adalah konfigurasi pin ATMega32.
21
Tabel 2.2. Tabel deskripsi masing-masing pin ATMega32 [7].
Nama pin Keterangan
VCC Supply tegangan digital GND Ground
Port A(PA7…PA0) Melayani ADC, selain itu juga bisa digunakan sebagai port I/O 8 bit dua arah dengan internal pull-up
Port B(PB7…PB0)
Port ini digunakan sebagai port I/O 8 bit du arah dengan internal pull-up. Port B juga bisa difungsikan secara individu sebagai:
PB7 : SCK (SPI Bus Serial Clock)
PB6 : MISO (SPI Bus Master Input/Slave Output) PB5 : MOSI (SPI Bus Master Output/Slave Inout) PB4 : /SS (SPI Slave Select Input)
PB3 : AIN1 (Analog Comparator Negative Input) OC0 (Output Compare Timer/Counter 0) PB2 : AIN0 (Analog Comparator Positive Input)
INT2 (External Interrupt 2 Input)
PB1 : T1 (Timer/Counter 1 External Counter Input) PB0 : T0 (Timer/Counter 0 External Counter Input) XCK (USART External Clock Input, Output)
Port C(PC7…PC0)
Port ini digunakan sebagai port I/O 8 bit du arah dengan internal pull-up. Port B juga bisa difungsikan secara individu sebagai:
PC7 : TOSC2 (Timer Oscilator 2) PC6 : TOSC1 (Timer Oscilator 1)
22 Lanjutan Tabel 2.2
Nama pin Keterangan
Port D(PD7…PD0)
Port ini digunakan sebagai port I/O 8 bit du arah dengan internal pull-up. Port B juga bisa difungsikan secara individu sebagai:
PD7 : OC2 (Output Compare Timer/Counter 2) PD6 : ICP1 (Timer Counter Input Capture)
PD5 : OC1A (Output Compare A Timer/Counter 1) PD4 : OC1B (Output Compare B Timer/Counter 1) PD3 : INT1 (External Interrupt 1 Input)
PD2 : INT2 (External Interrupt 2 Input) PD1 : TXD (USART Transmit)
PD0 : RXD (USART Receive)
/RESET Bekerja bila mendapatkan input pulsa low (active low) selama minimal 1,5 us.
XTAL1 Input untuk penguat osilator membalik XTAL2 Output dari penguat osilator membalik



![Gambar 2.4. Perbandingan tegangan keluaran dengan arus input [5].](https://thumb-ap.123doks.com/thumbv2/123dok/899562.597708/12.595.100.510.205.708/gambar-perbandingan-tegangan-keluaran-arus-input.webp)
![Gambar 2.5. Konfigurasi pin sensor arus ACS712 [5]](https://thumb-ap.123doks.com/thumbv2/123dok/899562.597708/13.595.103.519.107.568/gambar-konfigurasi-pin-sensor-arus-acs.webp)
