LEMBAR LAMPIRAN A
53 PERCOBAAN I
Peragaan Pembangkit Motor Brushless
I. Tujuan
mengenal dan memahami prinsip kerja pembangkit motor dc tiga fase(motor brushless/BLDC)
II. Dasar teori
Motor brushless atau motor dc 3 fase memiliki komponen utama rotor sebagai permanen magnet yang berputar dan stator sebagai medan magnet yang menyebabkan rotor berputar. Motor brushless terdiri dari 6 kaki yaitu: 3 kaki sensor hall effect dan 3 kaki input 3 fase. Motor brushless termasuk motor sinkron dikarenakan stator dan rotor motor ini dibangkitkan pada frekuensi yang sama.
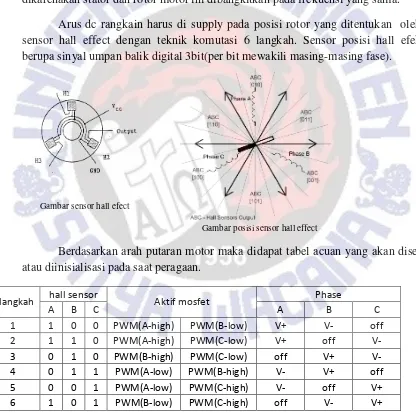
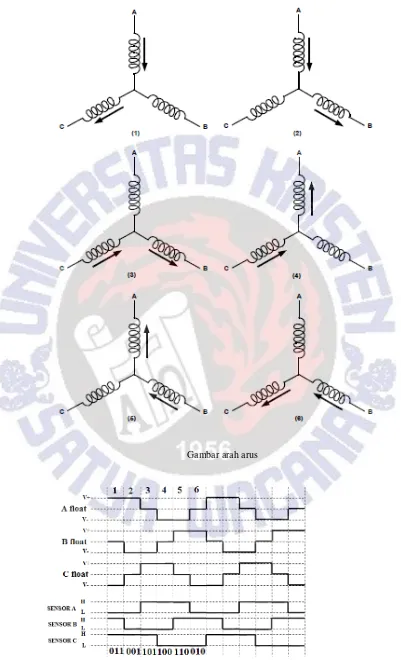
Arus dc rangkain harus di supply pada posisi rotor yang ditentukan oleh sensor hall effect dengan teknik komutasi 6 langkah. Sensor posisi hall efek berupa sinyal umpan balik digital 3bit(per bit mewakili masing-masing fase).
Gambar sensor hall efect
Gambar posisi sensor hall effect
Berdasarkan arah putaran motor maka didapat tabel acuan yang akan diset atau diinisialisasi pada saat peragaan.
6 langkah hall sensor Aktif mosfet Phase
A B C A B C
1 1 0 0 PWM(A-high) PWM(B-low) V+ V- off 2 1 1 0 PWM(A-high) PWM(C-low) V+ off V-
3 0 1 0 PWM(B-high) PWM(C-low) off V+ V- 4 0 1 1 PWM(A-low) PWM(B-high) V- V+ off 5 0 0 1 PWM(A-low) PWM(C-high) V- off V+ 6 1 0 1 PWM(B-low) PWM(C-high) off V- V+
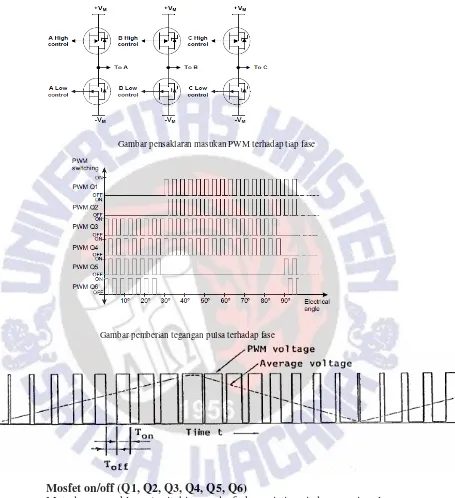
54 Kecepatan motor BLDC di kontrol oleh pemberian tegangan motor yang berurutan(pulsa). Dengan PWM, maka variasi tegangan motor dapat dicapai dengan mengubah duty cycle dari modulasi lebar pulsa.
Gambar pensaklaran masukan PWM terhadap tiap fase
Gambar pemberian tegangan pulsa terhadap fase
Mosfet on/off (Q1, Q2, Q3, Q4, Q5, Q6)
Metode pengsaklaran/switching pada frekuensi tinggi dengan sinyal yang dibangkitkan oleh mikrokontroler. Potensial rata-rata yang digunakan pada rotor proporsional dengan rasio waktu yaitu:
Kecepatan motor dapat dikontrol dengan mengatur rasio waktu bertambah atau berkurang sehingga kecepatan dapat bertambah atau berkurang.
III. Langkah Peragaan Modul Alat Peragaan 1
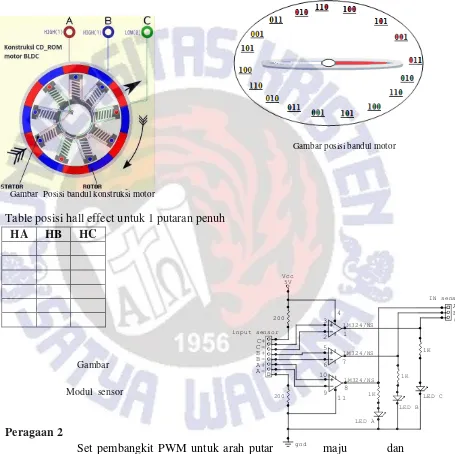
55 bandul pada LED hall
2. Putar manual motor dengan tangan untuk mengecek posisi sensor 3. Mencocokan posisi bandul dengan 3 led sensor yang menyala hasil
keluaran motor brushless.
Gambar posisi bandul motor
Gambar Posisi bandul konstruksi motor
Table posisi hall effect untuk 1 putaran penuh
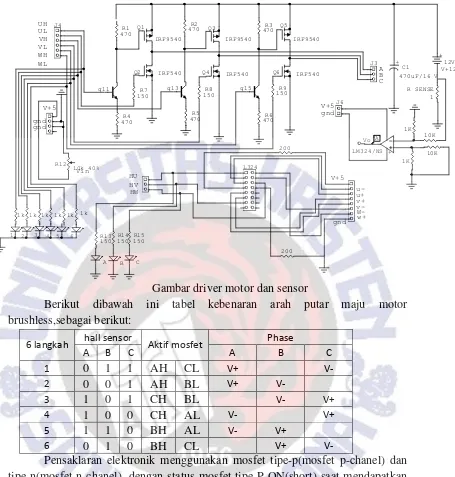
56 Gambar driver motor dan sensor
Berikut dibawah ini tabel kebenaran arah putar maju motor brushless,sebagai berikut:
6 langkah hall sensor Aktif mosfet Phase
A B C A B C
Pensaklaran elektronik menggunakan mosfet tipe-p(mosfet p-chanel) dan tipe-n(mosfet n-chanel), dengan status mosfet tipe P ON(short) saat mendapatkan input logic 0 (low) dan status mosfet tipe N on(short) saat mendapatkan input logic 1(high). Untuk mendapatkan status aktif high pada tipe p digunakan transistor switching tipe npn untuk mengaktifkan mosfet tipe P menjadi ON. Karateristik mosfet dengan arus yang mengalir dari drain ke source memiliki hambatan yang disebut Rds on. Hal ini sangat berpengaruh pada saat arus mengalir pada piranti mosfet. Rds on adalah hambatan dalam mosfet saat arus mengalir pada saat mosfet aktif(ON) sehingga terjadi desipasi daya yang mengakibatkan panas pada mosfet. Hal mempengaruhi kecepatan switching(pensaklaran), Ion(arus yang mengalir saat mosfet aktif), Ton(waktu aktif/ mosdfet short), Toff(waktu tidak aktif/mosfet open), Pon(desipasi daya), Psw(daya waktu pensaklaran), hubungannya:
Pon = Ton/Toff(Ion2 . Rds)
Q2 IRF540 Q4 IRF540
57 Psw = ½ Vd. Io. Fs. (Ton + Toff)
Untuk tipe P dapat dilihat persamaannya sebagai berikut:
Vth = -4volt, Vg – Vs = -4volt. Vg = Vs – 4 = 8 volt, maka mosfet tipe P akan ON/ aktif saat Vg < 8 volt dan Off saat Vg > 8volt.
Vg = Re/(Re+470)*12volt, sehingga dapat ditentukan nilai Re. nilai Rg dan Re akan berpengaruh pada waktu Ton dan Toff, dikarenakan di dalam mosfet terdapat kapasitor sehingga Rg akan berpengaruh pada waktu pengisian kapasitor dalam mosfet dan Re berpengaruh pada waktu pengosongan kapasitor, semakin kecil hambatan semakin cepat waktu yang diperlukan dalm pengisian dan pengosongan kapasitor.
Untuk mosfet tipe N akan aktif saat Vg > Vth dan tidak aktif saat Vg < Vth.
Berikut contoh pewaktu 6 langkah fase terhadap sensor hall effect dari microchip dan arah arusnya
S D
G S
D G
RL +V
12V
J1 Rb
1k
Re 470
Q3 2N3904
R 470
R1 150
IRF540 IRF9540
Vg +V
12V
58
Gambar arah arus
59 1. Set input tipe komutasi pada alat untuk putar searah jarum jam(maju) atau
sebaliknya(mundur)
2. Amati putaran motor, dan led status aktif mosfet
Tabel hasil peragaan maju dan mundur untuk 1 putaran penuh langkah Aktif mosfet
1 2 3 4 5 6 Peragaan 3
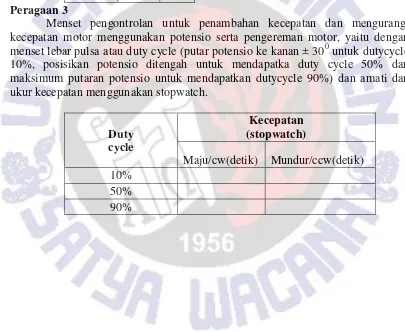
Menset pengontrolan untuk penambahan kecepatan dan mengurangi kecepatan motor menggunakan potensio serta pengereman motor, yaitu dengan menset lebar pulsa atau duty cycle (putar potensio ke kanan ± 300 untuk dutycycle 10%, posisikan potensio ditengah untuk mendapatka duty cycle 50% dan maksimum putaran potensio untuk mendapatkan dutycycle 90%) dan amati dan ukur kecepatan menggunakan stopwatch.
Duty cycle
Kecepatan (stopwatch)
Maju/cw(detik) Mundur/ccw(detik) 10%
60 MODUL PRAKTIKUM
PERCOBAAN II Karateristik Motor Brushless
I. Tujuan
memahami karateristik motor dc tiga fase(motor brushless/BLDC) II. Dasar teori
Motor brushless merupakan motor sinkron yang memiliki spesifikasi penggabungan antara motor dc dan motor induksi 3 fase. Dengan persamaan memiliki belitan stator yang menghasilkan medan putar dan perbedaannya yaitu motor sinkron menggunakan sumber DC sebagai pembangkit, namun motor brushless tidak dapat dibangkitkan hanya dengan pemberian sumber DC. Disamping itu kecepatan motor brushless memiliki presisi kecepatan yang ditentukan oleh jumlah kutub, dengan persamaan sebagai berikut:
Presisi kecepatan motor N, frekuensi sumber F, jumlah kutub P
N = 120(F/P)
Adapun motor brushless memiliki 2 komponen utama yaitu
Rotor– Arus rangkaian stator harus dipasok dengan encoder komutasi pada rotor saat merespon sinyal posisi yang ditentukan dimana Rotor memiliki magnet permanen, yang dipaksa untuk mengunci pada posisi tertentu bila dihadapkan pada medan magnet lainnya. Hal ini bertujuan menghilangkan kerugian gesek sikat dan komutator.
Stator – kumparan medan stator menghasilkan medan magnet berputar dengan pemberian tegangan berurutan yang sebanding dengan frekuensi yang dipasok. Motor ini berputar pada kecepatan sinkron, yang diberikan oleh persamaan diatas.
BLDC(Brushless Motor) mempunyai banyak keuntungan dibandingkan dengan tipe motor yang biasa (brushed) :
Motor dc tiga fase atau BLDC(brushless motor) mempunyai rangkaian driver yang mengontrol perpindahan arus, maka arus tersebut akan bisa lebih akurat (presisi). Mikrokontroler (simple computer system) juga dapat mengatur kecepatan motor lebih baik sehingga membuat "brushless motor" lebih efisien. Tidak adanya storing/electrical noise.
Tidak menggunakan "brushes" yang dapat rusak setelah lamanya pemakaian. Dengan posisi "electromagnets" di bagian "stator", maka pendinginan motor
menjadi lebih mudah.
Jumlah "electromagnets" di stator dapat sebanyak mungkin untuk mendapatkan kontrol yang lebih akurat.
Adapun pendekatan teorinya sebagai berikut:
Untuk torsi T dikaitkan dengan fluks фf kuat medan magnet dan Ia arus permanen
magnet(rotor) sesuai dengan persamaan berikut:
T=K. Ia. Фf
Hubunga antara kecepatan flux medan dan tegangan motor
61 Dimana:
E = gaya electromagnet yang dikembangkan pada terminal motor(volt)
Ф = flux medan magnet yang berbanding lurus dengan arus medan
N = kecepatan sinkron dalam rpm(putaran per menit) T= torsi
Ia = arus
K = konstanta persamaan
Va = tegangan masukan per fase E = tegangan motor
Ra = resistansi stator Xs = reaktansi sinkronisasi
Ia = arus permanen magnet pada rotor
Hubungan daya dengan torsi pada motor system 3 fase
P= T. 2π. Rpm
Power (kW) = torsi (Nm) x 2 phi x rotational speed (RPM) / 60000 P= daya (KW)
T= torsi
6000 dapat diartikan 1 menit= 60 detik, dan untuk mendapatkan KW = 1000 watt
Dimana efisiensi η adalah perbandingan dalam persen antara daya masukan dan
daya keluaran, serta perhitungan beban motor dengan HP adalah spesifikasi
bawaan motor, Beban = Pη/HP*0,7457
III. Langkah Percobaan Peragaan 1
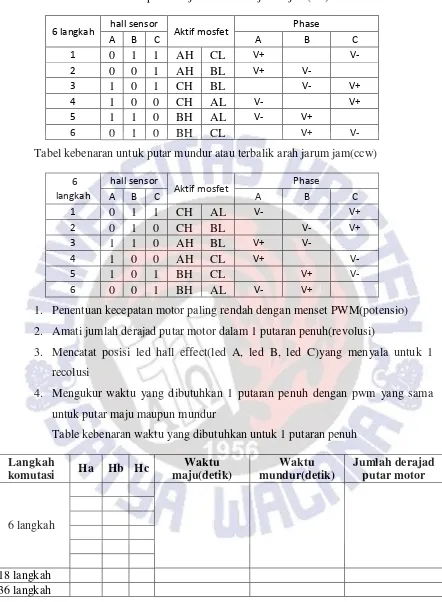
62 Tabel kebenaran untuk putar maju atau searah jarum jam(cw)
6 langkah hall sensor Aktif mosfet Phase
A B C A B C
Tabel kebenaran untuk putar mundur atau terbalik arah jarum jam(ccw) 6
langkah
hall sensor
Aktif mosfet Phase
A B C A B C
1. Penentuan kecepatan motor paling rendah dengan menset PWM(potensio) 2. Amati jumlah derajad putar motor dalam 1 putaran penuh(revolusi)
3. Mencatat posisi led hall effect(led A, led B, led C)yang menyala untuk 1 recolusi
4. Mengukur waktu yang dibutuhkan 1 putaran penuh dengan pwm yang sama untuk putar maju maupun mundur
Table kebenaran waktu yang dibutuhkan untuk 1 putaran penuh Langkah
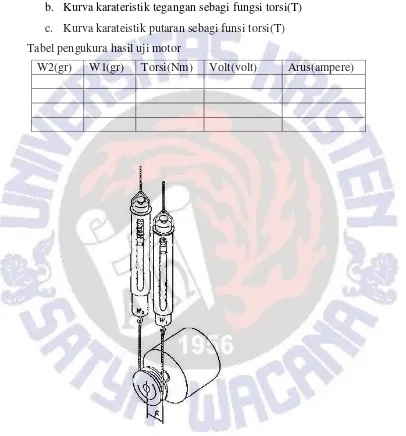
63 torsi dapat dilakukan dengan menggunakan prony brake dan untuk menentukan harga torsi dari pengujian adalah
T = 9,8(W2-W1)R (Nm)
Dimana W2 dan W1 adalah skala yang dinyatakan dalam Kg, sedangkan R adalah jari-jari perputaran motor yang dinyatakan dalam meter atau cm .adapun kurva karateristik yang dapat dicapai yaitu:
a. Kurva karateristik arus beban(Ia) sebagai fungsi torsi(T) b. Kurva karateristik tegangan sebagi fungsi torsi(T) c. Kurva karateistik putaran sebagi funsi torsi(T) Tabel pengukura hasil uji motor
Gambar pengujian pengukuran torsi
64
LEMBAR LAMPIRAN B
65
Tampak atas Tampak Depan