5
BAB II
SISTEM
MESIN PEMOTONG AKRILIK
2.1. Gambaran Mesin Pemotong Akrilik
Mesin pemotong akrilik termasuk dalam jenis mesin CNC (Computer Numerical Control). Mesin CNC adalah sebuah mesin perkakas yang dioperasikan dan dikontrol oleh sebuah komputer berdasarkan data dari program CAD. CAD (Computer Aided Design) adalah suatu program komputer untuk menggambar suatu produk atau bagian dari suatu produk. Produk yang ingin digambarkan bisa diwakili oleh garis-garis maupun simbol-simbol yang memiliki makna tertentu. Contoh program CAD yang banyak digunakan adalah Corel, Autocad, Solid Work dan masih banyak lainnya.
Gambar 2.1. Mesin CNC cuting
Program CAD mempunyai bermacam-macam format data file. Sebagai contoh adalah CDR, SVG, PLT, DXF dan lain-lain. Salah satu format file data yang digunakan adalah PLT. File dengan ekstensi plt disebut juga HPGL (Hewlett Packard Graphich Language) adalah standar bahasa untuk mencetak gambar berupa garis [2]. Bahasa ini dibuat khusus untuk gambar 2 dimensi pada mesin plotter Hewlett Packard.
6
yang diinginkan. File plt menggunakan dua huruf sebagai instruksi untuk menggambar garis, lingkaran, huruf dan simbol.
Tabel 2.1 Kode perintah HPGL
IN; initialize, start a plotting job
SP1; select pen 1
PU0,0; lift Pen Up and move to starting point for next action
PD100,0; put Pen Down and move to the following locations
2.2 Sistem Kerja Mesin Pemotong Akrilik
Mesin pemotong akrilik bekerja berdasarkan data yang diplot dalam sumbu koordinat kartesian 3 dimensi. Setiap data mempunyai nilai dari masing-masing sumbu. Sumbu X dan Y merupakan nilai posisi koordinat sedangkan sumbu Z merupakan nilai kedalaman atau ketinggian.
Gambar 2.2. Sumbu kartesian 3 dimensi
7
motor Y
motor X
penggerak Y
penggerak X
penggerak Z motor Z
Gambar 2.3. Mekanik penggerak 3 Axis
8
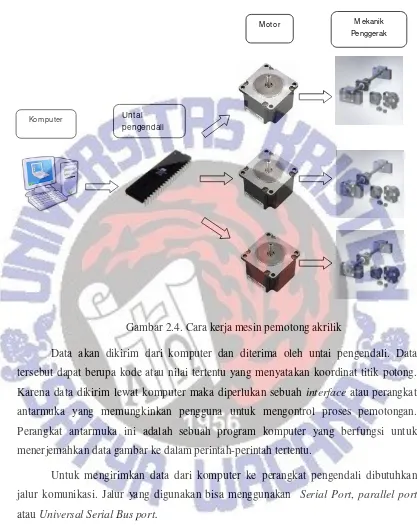
Gambar 2.4. Cara kerja mesin pemotong akrilik
Data akan dikirim dari komputer dan diterima oleh untai pengendali. Data tersebut dapat berupa kode atau nilai tertentu yang menyatakan koordinat titik potong. Karena data dikirim lewat komputer maka diperlukan sebuah interface atau perangkat antarmuka yang memungkinkan pengguna untuk mengontrol proses pemotongan. Perangkat antarmuka ini adalah sebuah program komputer yang berfungsi untuk menerjemahkan data gambar ke dalam perintah-perintah tertentu.
Untuk mengirimkan data dari komputer ke perangkat pengendali dibutuhkan jalur komunikasi. Jalur yang digunakan bisa menggunakan Serial Port, parallel port atau Universal Serial Busport.
Data yang dikirim dari komputer akan diterima dan diolah oleh untai pengendali. Data tersebut diubah dalam bentuk pulsa tegangan dengan frekuensi tertentu dan dalam waktu tertentu. Untai pengendali ini berupa untai mikrokontroler yang berfungsi untuk mengolah data dan mengontrol gerakan motor.
Kom put er Unt ai
pengendali
M ot or M ekanik
9
Karena arus dan tegangan keluaran dari mikrokontroler sangat terbatas, sedangkan arus dan tegangan yang dibutuhkan untuk menggerakkan motor cukup besar maka dibutuhkan untai driver motor. Untai ini menggunakan transistor dan MOSFET sebagai komponen utamanya.
Motor yang digunakan adalah motor stepper. Motor stepper bekerja dengan mengubah pulsa listrik menjadi gerakan mekanik diskrit. Karena mempunyai gerakan mekanik diskrit, maka putaran motor dapat dengan mudah diatur sesuai kebutuhan. Putaran motor stepper tergantung dari jumlah pulsa yang diberikan, sedangkan kecepatannya tergantung frekuensi pulsa yang diberikan. Langkah motor stepper dinyatakan dalam sudut. Sudut tersebut disebut sudut langkah atau step angle. Step angle adalah sudut yang dihasilkan dalam 1 kali pergerakan motor stepper. Misalkan sebuah motor stepper mempunyai step angle 1.8° maka dalam 1 putaran mempunyai 200 step.
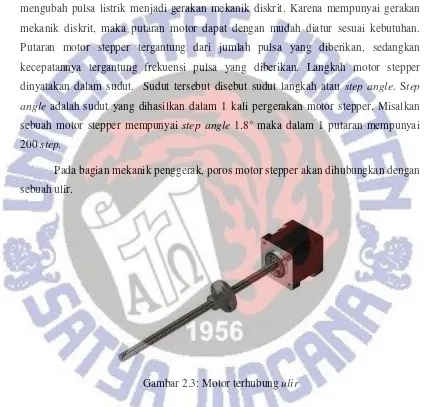
Pada bagian mekanik penggerak, poros motor stepper akan dihubungkan dengan sebuah ulir.
Gambar 2.3: Motor terhubung ulir
10
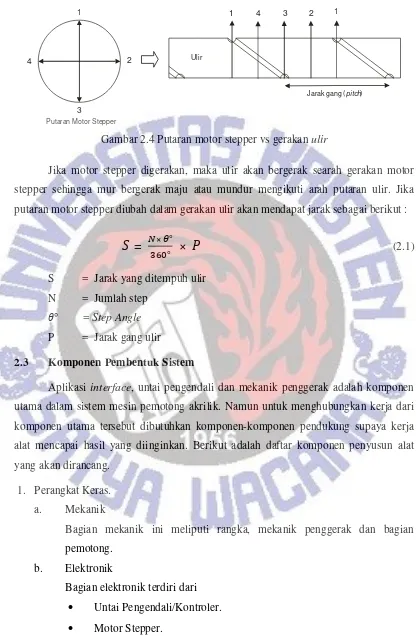
Gambar 2.4 Putaran motor stepper vs gerakan ulir
Jika motor stepper digerakan, maka ulir akan bergerak searah gerakan motor stepper sehingga mur bergerak maju atau mundur mengikuti arah putaran ulir. Jika putaran motor stepper diubah dalam gerakan ulir akan mendapat jarak sebagai berikut :
=
× ° 2.3 Komponen Pembentuk SistemAplikasi interface, untai pengendali dan mekanik penggerak adalah komponen utama dalam sistem mesin pemotong akrilik. Namun untuk menghubungkan kerja dari komponen utama tersebut dibutuhkan komponen-komponen pendukung supaya kerja alat mencapai hasil yang diinginkan. Berikut adalah daftar komponen penyusun alat yang akan dirancang.
1. Perangkat Keras. a. Mekanik
Bagian mekanik ini meliputi rangka, mekanik penggerak dan bagian pemotong.
b. Elektronik
Bagian elektronik terdiri dari
Untai Pengendali/Kontroler.
11
Motor Driver.
Sensor photo interrupter.
Catu daya. 2. Perangkat Lunak
a. Aplikasi Desktop
Aplikasi desktop berisi program sebagai berikut :
Program pengubah resolusi.
Program penampilkan gambar.
Program untuk menset kedalaman.
Program untuk mengirim dan menerima data ke untai pengendali. b. Program Pengendali
Program penerima dan pengirim data ke aplikasi desktop.