Robot Pengintai dengan Pengendalian Secara Otomatis Berbasis Arduino
Uno dan Menggunakan Jaringan Nirkabel Sebagai Pengendali Secara
Manual
NYOMAN PARWA DINAWAN
Jurusan Sistem Komputer, Fakultas Ilmu Komputer dan Teknologi Informasi, Universitas Gunadarma, Jl. KH. Noor Ali Kalimalang Bekasi Telp. (021) 88860117
Abstraksi: Kebutuhan manusia untuk menerapkan teknologi di kehidupan nyata semakin meningkat, terutama dalam hal membantu pekerjaan sehari-hari. Salah satu teknologi yang diterapkan di kehidupan nyata dan bisa meniru tingkah laku manusia adalah robot. Di Indonesia, saat ini para aparat kepolisian telah memanfaatkan teknologi robot untuk membantu menyelesaikan pekerjaannya dalam menjaga keamanan. Teror yang terjadi di Indonesia sangat meresahkan masyarakat, sehingga para aparat kepolisian harus menangkap dan melakukan pengintaian pelaku terror tersebut tanpa adanya resiko. Hal tersebut yang mendasari pembuatan “Robot Pengintai dengan Pengendalian Secara Otomatis Berbasis Arduino Uno dan Menggunakan Jaringan Nirkabel Sebagai Pengendali Secara Manual”.
Kata kunci: Arduino Uno, Sensor Ultrasonik, Jaringan Nirkabel, Motor DC
Tanggal Pembuatan: 21 September 2012 PENDAHULUAN
Di Indonesia, saat ini para aparat kepolisian telah memanfaatkan teknologi robot untuk membantu menyelesaikan pekerjaannya dalam menjaga keamanan kedaulatan republik Indonesia. Salah satu contoh robot yang telah digunakan adalah robot penjinak bom dengan kontrol manual. Teror yang terjadi di Indonesia sangat meresahkan masyarakat, sehingga para aparat kepolisian harus menangkap pelaku terror tersebut tanpa adanya resiko. Biasanya para pelaku terror bersembunyi di dalam rumah, yang mengharuskan para petugas untuk masuk dan mengecek ruangan dalam rumah tersebut. Tentunya hal tersebut sangat beresiko dan membahayakan para aparat kepolisian, oleh karena itu diperlukan suatu alat yang dapat menggantikan tugas memasuki ruangan dalam rumah tersebut.
Maka dibuatlah suatu prototipe robot yaitu Robot Pengintai Dengan
Pengendalian Secara Otomatis Berbasis Arduino Uno dan Menggunakan Jaringan Nirkabel Sebagai Pengendali Secara Manual yang dilengkapi dengan kamera wireless serta terdapat lampu yang dalam gelap akan menyala secara otomatis.
TINJAUAN PUSTAKA 1
Untuk membuat suatu Robot Pengintai Dengan Pengendalian Secara Otomatis Berbasis Arduino Uno dan Menggunakan Jaringan Nirkabel Sebagai Pengendali Secara Manual, maka diperlukan landasan teori dari komponen yang akan dipergunakan sehingga dapat diketahui karakteristik dan prinsip kerja dari rangkaian tersebut serta dapat menghasilkan keluaran yang diharapkan. Secara umum rangkaian ini terdiri dari sebagai berikut, yaitu :
3Mikrokontroller
4Mikrokontroller merupakan sebuah
processor yang digunakan untuk kepentingan kontrol. Meskipun mempunyai bentuk yang jauh lebih kecil dari suatu komputer pribadi dan komputer mainframe, mikrokontroller dibangun dari elemen–elemen dasar yang sama. Seperti umumnya komputer, mikrokontroller adalah alat yang mengerjakan instruksi– instruksi yang diberikan kepadanya. Artinya, bagian terpenting dan utama dari suatu sistem terkomputerisasi adalah program itu sendiri yang dibuat oleh seorang programmer. Program ini menginstruksikan komputer untuk melakukan tugas yang lebih kompleks yang diinginkan oleh programmer.
Beberapa fitur yang umumnya ada di dalam mikrokontroller adalah sebagai berikut :
• RAM ( Random Access Memory )
RAM digunakan oleh mikrokontroller untuk tempat penyimpanan variable. Memori ini bersifat volatile yang berarti akan kehilangan semua datanya jika tidak mendapatkan catu daya.
• ROM ( Read Only Memory )
ROM seringkali disebut sebagai kode memori karena berfungsi untuk tempat penyimpanan program yang akan diberikan oleh user
• Register
Merupakan tempat penyimpanan nilai – nilai yang akan digunakan dalam proses yang telah disediakan oleh mikrokontroller
• Special Function Register
Merupakan register khusus yang berfungsi untuk mengatur jalannya mikrokontroller. Register ini terletak pada RAM
• Input dan Output Pin
Pin input adalah bagian yang berfungsi sebagai penerima signal dari luar, pin ini dapat dihubungkan ke berbagai media inputan seperti keypad, sensor, dan sebagainya. Pin output adalah bagian yang berfungsi untuk mengeluarkan
signal dari hasil proses algoritma mikrokontroller.
• Interrupt
Interrupt bagian dari mikrokontroller yang berfungsi sebagai bagian yang dapat melakukan interupsi, sehingga ketika program utama sedang berjalan, program utama tersebut dapat diinterupsi dan menjalankan program interupsi terlebih dahulu.
Beberapa interrupt pada umumnya adalah sebagai berikut :
Interrupt Eksternal
Interrupt akan terjadi bila ada inputan dari pin interrupt.
Interrupt timer
Interrupt akan terjadi bila waktu tertentu telah tercapai.
Interrupt serial
Interupt yang terjadi ketika ada penerimaan data dari komunikasi serial.
Fitur AVR ATMega328
ATMega328 adalah
mikrokontroller keluaran dari atmel yang mempunyai arsitektur RISC (Reduce Instruction Set Computer) yang dimana setiap proses eksekusi data lebih cepat dari pada arsitektur CISC (Completed
Instruction Set Computer).
Mikrokontroller ini memiliki beberapa fitur antara lain :
• 130 macam instruksi yang
hampir semuanya
dieksekusi dalam satu siklus
clock.
• 32 x 8-bit register serba guna.
• Kecepatan mencapai 16 MIPS dengan clock 16 MHz. • 32 KB Flash memory dan pada
arduino memiliki bootloader yang menggunakan 2 KB dari flash memori sebagai
bootloader.
• Memiliki EEPROM (Electrically
Only Memory) sebesar 1KB
sebagai tempat
penyimpanan data semi permanent karena EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
• Memiliki SRAM (Static Random
Access Memory) sebesar 2KB. • Memiliki pin I/O digital
sebanyak 14 pin 6 diantaranya PWM (Pulse Width
Modulation) output.
• Master / Slave SPI Serial
interface.
Mikrokontroller ATmega 328 memiliki arsitektur Harvard, yaitu memisahkan memori untuk kode program dan memori untuk data sehingga dapat memaksimalkan kerja dan parallelism. Instruksi – instruksi dalam memori program dieksekusi dalam satu alur tunggal, dimana pada saat satu instruksi dikerjakan instruksi berikutnya sudah diambil dari memori program. Konsep inilah yang memungkinkan instruksi – instruksi dapat dieksekusi dalam setiap satu siklus clock.
32 x 8-bit register serba
guna digunakan untuk
mendukung operasi pada ALU (
Arithmatic Logic unit ) yang dapat dilakukan dalam satu siklus. 6 dari register serbaguna ini dapat digunakan sebagai 3 buah register pointer 16-bit pada mode pengalamatan tak langsung untuk mengambil data pada ruang memori data. Ketiga register pointer 16-bit ini disebut dengan register X ( gabungan R26 dan R27 ), register Y ( gabungan R28 dan R29 ), dan register Z ( gabungan R30 dan R31 ).
Hampir semua instruksi AVR memiliki format 16-bit. Setiap alamat memori program terdiri
dari instruksi 16-bit atau 32-bit.Selain register serba guna di atas, terdapat register lain yang terpetakan dengan teknik memory
mapped I/O selebar 64 byte. Beberapa register ini digunakan untuk fungsi khusus antara lain sebagai register control Timer/ Counter, Interupsi, ADC, USART, SPI, EEPROM, dan fungsi I/O lainnya. Register – register ini menempati memori pada alamat 0x20h – 0x5Fh.
Berikut ini adalah tampilan architecture ATmega 328 :
Gambar 2.1. Architecture ATMega328
Arduino
Arduino adalah sebuah board mikrokontroller yang berbasis ATmega328. Arduino memiliki 14 pin input/output yang mana 6 pin dapat digunakan sebagai output PWM, 6 analog input, crystal osilator 16 MHz, koneksi USB, jack power, kepala ICSP, dan tombol reset. Arduino
mampu men-support
mikrokontroller; dapat
menggunakan kabel USB. ( http://www.arduino.cc )
Gambar 2.3. Board Arduino ATmega328 Berikut ini adalah konfigurasi dari arduino uno :
Mikronkontroler ATmega328 Beroperasi pada tegangan 5V Tegangan input (rekomendasi) 7 -
12V
Batas tegangan input 6 - 20V
Pin digital input/output 14 (6 mendukung output PWM)
Pin analog input 6
Arus pin per input/output 40 mA Arus untuk pin 3.3V adalah 50 mA Flash Memory 32 KB
(ATmega328) yang mana 2 KB digunakan oleh bootloader
SRAM 2 KB (ATmega328) EEPROM 1KB (ATmega328) Kecepatan clock 16 MHz
• Power
Arduino dapat diberikan power melalui koneksi USB atau power supply. Powernya diselek secara otomatis.
Power supply dapat menggunakan
adaptor DC atau baterai. Adaptor dapat dikoneksikan dengan mencolok jack adaptor pada koneksi port input supply.
Board arduino dapat dioperasikan
menggunakan supply dari luar sebesar 6 - 20 volt. Jika supply kurang dari 7V, kadangkala pin 5V akan menyuplai kurang dari 5 volt dan board bisa
menjadi tidak stabil. Jika menggunakan lebih dari 12 V, tegangan di regulator bisa menjadi sangat panas dan menyebabkan kerusakan pada board. Rekomendasi tegangan ada pada 7 sampai 12 volt. Penjelasan pada pin power adalah sebagai berikut :
Vin
Tegangan input ke board arduino ketika menggunakan tegangan dari luar (seperti yang disebutkan 5 volt dari koneksi USB atau tegangan yang diregulasikan). Pengguna dapat memberikan tegangan melalui pin ini, atau jika tegangan suplai menggunakan
power jack, aksesnya menggunakan pin ini.
5V
Regulasi power supply digunakan untuk power mikrokontroller dan komponen lainnya pada board. 5V dapat melalui Vin menggunakan regulator pada board, atau supply oleh USB atau supply regulasi 5V lainnya.
3V3.
Suplai 3.3 volt didapat oleh FTDI chip yang ada di board. Arus maximumnya adalah 50mA
Pin Ground
berfungsi sebagai jalur ground pada arduino
• Memori
ATmega328 memiliki 32 KB flash memori untuk menyimpan kode, juga 2 KB yang digunakan untuk bootloader. ATmega328 memiliki 2 KB untuk SRAM dan 1 KB untuk EEPROM.
• Input dan Output
Setiap 14 pin digital pada arduino dapat digunakan sebagai input atau output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(). Input/output dioperasikan pada 5 volt. Setiap pin dapat menghasilkan atau menerima maximum 40 mA dan memiliki internal pull-up resistor (disconnected
oleh default) 20-50 KOhms. Beberapa pin memiliki fungsi sebagai berikut : Serial : 0 (RX) dan 1 (TX).
Digunakan untuk menerima (RX) dan mengirim (TX) TTL data serial. Pin ini terhubung pada pin yang koresponding dari USB FTDI ke TTL chip serial.
Interupt eksternal : 2 dan 3. Pin ini dapat dikonfigurasikan untuk trigger sebuah interap pada low value, rising atau falling edge, atau perubahan nilai.
PWM : 3, 5, 6, 9, 10, dan 11. Mendukung 8-bit output PWM dengan fungsi analogWrite().
SPI : 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Pin ini mensuport komunikasi SPI, yang mana masih mendukung hardware, yang tidak termasuk pada bahasa arduino.
LED : 13. Ini adalah dibuat untuk koneksi LED ke digital pin 13. Ketika pin bernilai HIGH, LED hidup, ketika pin bernilai LOW maka LED akan mati.
Sensor Ping Ultrasonic
Dalam sistem otomatisasi perubahan informasi pada led matrix untuk mendeteksi adanya suatu objek digunakan sensor ping))) ultrasonic. Sensor PING
Ultrsonic yang digunakan adalah sensor
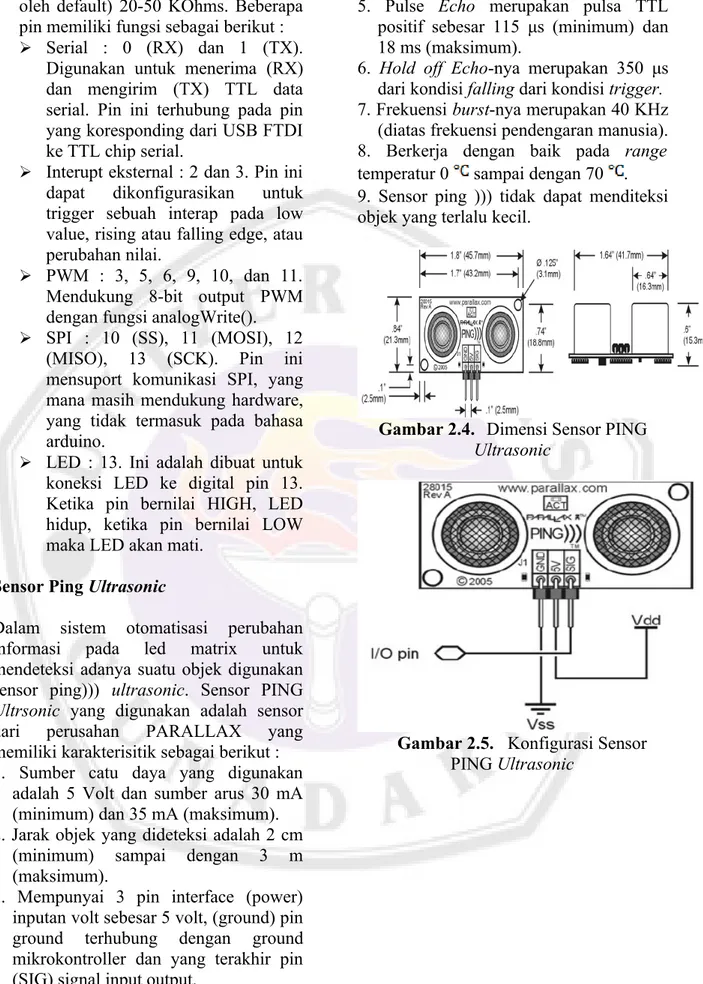
dari perusahan PARALLAX yang memiliki karakterisitik sebagai berikut : 1. Sumber catu daya yang digunakan
adalah 5 Volt dan sumber arus 30 mA (minimum) dan 35 mA (maksimum). 2. Jarak objek yang dideteksi adalah 2 cm
(minimum) sampai dengan 3 m (maksimum).
3. Mempunyai 3 pin interface (power) inputan volt sebesar 5 volt, (ground) pin ground terhubung dengan ground mikrokontroller dan yang terakhir pin (SIG) signal input output.
4. Input Triger-nya merupakan pulsa TTL positif sebesar 2 μs, typical 5 μs.
5. Pulse Echo merupakan pulsa TTL positif sebesar 115 μs (minimum) dan 18 ms (maksimum).
6. Hold off Echo-nya merupakan 350 μs dari kondisi falling dari kondisi trigger. 7. Frekuensi burst-nya merupakan 40 KHz
(diatas frekuensi pendengaran manusia). 8. Berkerja dengan baik pada range temperatur 0 sampai dengan 70 . 9. Sensor ping ))) tidak dapat menditeksi objek yang terlalu kecil.
Gambar 2.4. Dimensi Sensor PING
Ultrasonic
Gambar 2.5. Konfigurasi Sensor PING Ultrasonic
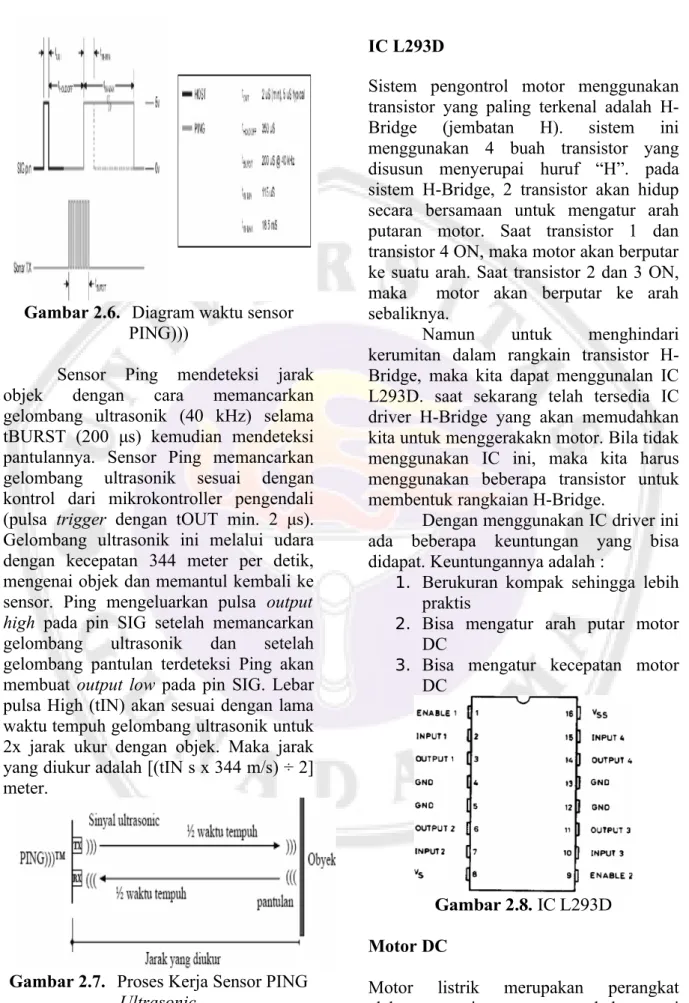
Gambar 2.6. Diagram waktu sensor PING)))
Sensor Ping mendeteksi jarak objek dengan cara memancarkan gelombang ultrasonik (40 kHz) selama tBURST (200 μs) kemudian mendeteksi pantulannya. Sensor Ping memancarkan gelombang ultrasonik sesuai dengan kontrol dari mikrokontroller pengendali (pulsa trigger dengan tOUT min. 2 μs). Gelombang ultrasonik ini melalui udara dengan kecepatan 344 meter per detik, mengenai objek dan memantul kembali ke sensor. Ping mengeluarkan pulsa output
high pada pin SIG setelah memancarkan
gelombang ultrasonik dan setelah gelombang pantulan terdeteksi Ping akan membuat output low pada pin SIG. Lebar pulsa High (tIN) akan sesuai dengan lama waktu tempuh gelombang ultrasonik untuk 2x jarak ukur dengan objek. Maka jarak yang diukur adalah [(tIN s x 344 m/s) ÷ 2] meter.
Gambar 2.7. Proses Kerja Sensor PING
Ultrasonic
IC L293D
Sistem pengontrol motor menggunakan transistor yang paling terkenal adalah H-Bridge (jembatan H). sistem ini menggunakan 4 buah transistor yang disusun menyerupai huruf “H”. pada sistem H-Bridge, 2 transistor akan hidup secara bersamaan untuk mengatur arah putaran motor. Saat transistor 1 dan transistor 4 ON, maka motor akan berputar ke suatu arah. Saat transistor 2 dan 3 ON, maka motor akan berputar ke arah sebaliknya.
Namun untuk menghindari kerumitan dalam rangkain transistor H-Bridge, maka kita dapat menggunalan IC L293D. saat sekarang telah tersedia IC driver H-Bridge yang akan memudahkan kita untuk menggerakakn motor. Bila tidak menggunakan IC ini, maka kita harus menggunakan beberapa transistor untuk membentuk rangkaian H-Bridge.
Dengan menggunakan IC driver ini ada beberapa keuntungan yang bisa didapat. Keuntungannya adalah :
1. Berukuran kompak sehingga lebih praktis
2. Bisa mengatur arah putar motor DC
3. Bisa mengatur kecepatan motor DC
Gambar 2.8. IC L293D Motor DC
Motor listrik merupakan perangkat elektromagnetis yang mengubah energi
listrik menjadi energi mekanik. Energi mekanik ini digunakan untuk, misalnya memutar impeller pompa, fan atau blower, menggerakan kompresor, mengangkat bahan,dll. Motor listrik digunakan juga di rumah (mixer, bor listrik, fan angin) dan di industri. Motor listrik kadangkala disebut “kuda kerja” nya industri sebab diperkirakan bahwa motor-motor menggunakan sekitar 70% beban listrik total di industri.
Motor DC memerlukan suplai tegangan yang searah pada kumparan medan untuk diubah menjadi energi mekanik. Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Jika terjadi putaran pada kumparan jangkar dalam pada medan magnet, maka akan timbul tegangan (GGL) yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolak-balik. Prinsip kerja dari arus searah adalah membalik phasa tegangan dari gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen.
Gambar 2.9. Motor DC Sederhana Catu tegangan dc dari baterai menuju ke lilitan melalui sikat yang menyentuh komutator, dua segmen yang terhubung dengan dua ujung lilitan. Kumparan satu lilitan pada gambar di atas disebut angker dinamo. Angker dinamo
adalah sebutan untuk komponen yang berputar di antara medan magnet.
Kamera Wireless
Kamera kecil tanpa kabel ini menggunakan gelombang radio untuk berkomunikasi, kamera ini dapat menangkap gambar. Kamera ini sangat cocok digunakan untuk kegiatan mengamati suatu objek atau untuk alasan keamanan dan kegiatan memata-matai. Output analog bisa dihubungkan langsung ke komputer melalui port paralel. Pada perancangan robot pengintai ini, kamera merupakan media yang berfungsi menangkap gambar objek yang kemudian gambar tersebut akan telihat pada layar komputer dalam bentuk citra. Kamera yang digunakan alam menangkap gambar objek adalah kamera wireless.
Gambar 2.10. Kamera Wireless Berikut ini adalah spesifikasi kamera wireless yang di gunakan:
• Transmission distance 120 m (line of sight)
• Modulasi ; GFSK, FHSS.
• Image sensor : color CMOS image sensor.
• Operation Frequency 1,2 GHz.
• Focus: Manual adjustable from 30 mm to Infinity.
• Horizontal Viewing Angle: 50 Degree. • Voltage: 6V DC or 4 AAA
• Lensf : f3.0mm, F 2,4.
Spesifikasi dari Receiver yang digunakan :
• Operation Frequency: 1.2 GHz. • Antenna : dipole antenna • Power: USB port
Komunikasi Wireless Radio Kontrol Komunikasi wireless merupakan media transmisi antara pengiriman data (transmitter) dengan penerima data (receiver) tanpa perantara kabel. Data-data yang bergerak dari pemancar (transmitter) menuju penerima (receiver) merambat secara bebas di udara. Data-data tersebut berupa sinyal radio dengan frekuensi yang berbeda. Frekuensi tersebut memiliki hubungan berbanding terbalik dengan panjang gelombang yang merambat di udara. (Malvino,1995)
Tabel 2.5. Jenis-jenis transmisi (Malvino,1995)
Dalam sistem ini, sinyal radio tidak terus menerus dipancarkan tapi hanya dibangkitkan saat pengontrol mengirimkan perintah kanan/kiri atau maju/mundur, itupun hanya merupakan frekuensi radio yang terputus-putus, sehingga merupakan pengiriman pulsa-pulsa frekuensi gelombang radio. Jumlah pulsa yang dikirimkan mewakili perintah yang dikirim, perintah maju diwakili dengan 8 pulsa, kiri diwakili dengan 16 pulsa, kanan 32 pulsa dan mundur 64 pulsa. Perintah
yang dikirimkan bisa merupakan gabungan dari 2 perintah sekaligus, yaitu gabungan dari perintah maju/mundur dan kanan/kiri, sebagai contoh bisa dikirimkan perintah maju dan kiri sekaligus, dalam hal ini jumlah pulsa yang dikirim adalah 24, yaitu penjumlahan dari perintah maju sebanyak 8 pulsa dan perintah kiri sebanyak 16 pulsa.
Setelah sebuah perintah dikirim, sistem menghentikan pengiriman perintah dalam jeda waktu tertentu, jeda waktu ini diperlukan akan rangkaian penerima mempunyai waktu yang cukup untuk melaksakan perintah dengan baik. Pada tugas akhir ini, penulis menggunakan teknologi wireless. Rangkaian wireless yang digunakan adalah rangkaian radio kontrol dengan frekuensi 27 MHz. Pada bagian pemancar (transmitter) berfungsi memberi sinyal perintah dan kemudian perintah tersebut akan diterima oleh receiver. Dalam hal ini bagian pemancar dikendalikan secara manual, sedangkan bagian penerima dihubungkan pada IC L293D untuk pergerakan motornya.
LDR ( Light Dependent Resistor )
LDR adalah singkatan dari Light Dependent Resistor adalah resistor yang nilai resistansinya berubah – ubah karena adanya intensitas cahaya yang diserap. LDR juga merupakan resistor yang mempunyai koefisien temperatur negative, dimana resistansinya dipengaruhi intensitas cahaya. LDR dibentuk dari Cadium Sulviet ( CDS ) yang mana CDS dihasilkan dari serbuk keramik. Secara umum, CDS disebut juga peralatan photo conductive, selama konduktivitas atau resistansi dari CDS berpariasi terhadap intensitas cahaya. Jika intensitas cahaya yang diterima tinggi maka hambatan yang diterima juga akan tinggi yang mengakibatkan tegangan yang keluar juga akan tinggi begitu juga sebaliknya disinilah mekanisme proses perubahan cahaya menjadi listrik terjadi.
Gambar 2.11. : ( a ). Karakteristik LDR ( b ). Simbol LDR
LED ( Light Emitting Diode)
Light Emitting Diode ( dioda pemancar cahaya ), yang lebih dikenal dengankependekannya yaitu LED, menghasilkan cahaya ketika arus mengalir melewatinya. Pada awalnya LED hanya dibuat dengan warna merah, namun sekarang warna-warna jingga,kuning, hijau, biru dan putih juga tersedia di pasaran. Terdapat pula LED inframerah,yang menghasilkan cahaya inframerah, alih-alih cahaya tampak. Sebuah LED yangtipikal memiliki kemasan berbentuk kubah yang terbuat dari bahan plastik, denganpinggiran yang menonjol ( rim ) pada bagian bawah kubah, terdapat dua kubah kakiterminal dibagian bawah kubah. Biasanya, meskipun tidak selalu demikian, kaki katoda lebih pendek dari kaki anoda. Cara lain untuk membedakan kaki katoda dengan kaki anoda adalah dengan memperhatikan bagian rim ( apabila LED yang bersangkutan memang memilikinya ). Rim dibuat berbentuk datar pada sisi yang berdekatan dengan kaki katoda.
Gambar 2.12. Simbol LED
PERANCANGAN DAN IMPLEMENTASI Gambaran Umum
Robot Pengintai Dengan Pengendalian Secara Otomatis Berbasis Arduino Uno dan Menggunakan Jaringan Nirkabel Sebagai Pengendali Secara Manual merupakan robot yang dikendalikan dengan dua pengendali yaitu kendali otomatis dan kendali secara manual, dimana robot ini bisa bergerak secara otomatis dan dapat menghindari halangan yang ada di depannya dengan memanfaatkan sensor ping yang dapat mengukur jarak suatu objek, tentunya pergerakan motor pada robot ini diatur di dalam program yang telah tertanam pada arduino.
Pergerakan secara manual robot ini mengggunakan remote pengendali jaringan nirkabel melalui modul transmitter dengan frekuensi 27MHz, dimana pada robot telah terpasang modul receiver yang digunakan untuk menerima sinyal yang dikirim dari
remote pengendali tersebut, sehingga robot
ini bisa juga dikendalikan dari jarak jauh. Robot ini dapat melakukan pengintaian ke dalam ruangan karena telah dilengkapi dengan kamera wireless yang akan memantau kondisi yang ada pada ruangan dan dilengkapi juga dengan dua buah LED yang akan memberikan penerangan ketika robot berada pada tempat yang gelap.
Robot dapat menyalakan LED ketika berada pada ruangan yang gelap disebabkan karena pada robot telah dilengkapi dengan sensor LDR yang bekerja berdasarkan banyak atau sedikitnya cahaya yang diterima oleh sensor LDR tersebut. Semakin banyak cahaya yang diterima oleh sensor LDR maka nilai resistansinya semakin kecil sehingga LED akan mati, sedangkan semakin sedikit cahaya yang diterima maka nilai resistansinya akan besar sehingga LED akan menyala.
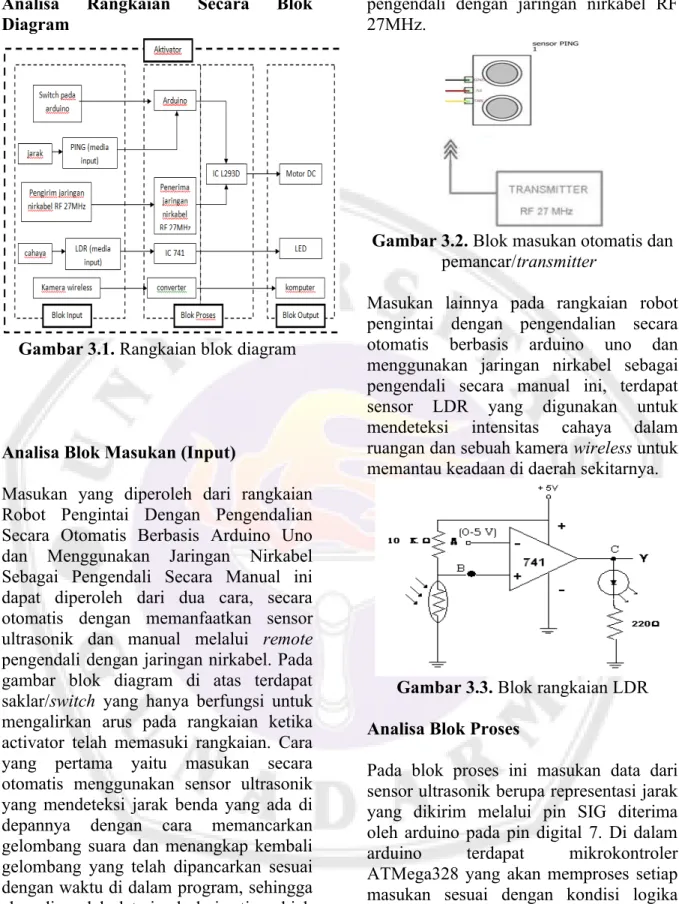
Analisa Rangkaian Secara Blok Diagram
Gambar 3.1. Rangkaian blok diagram
Analisa Blok Masukan (Input)
Masukan yang diperoleh dari rangkaian Robot Pengintai Dengan Pengendalian Secara Otomatis Berbasis Arduino Uno dan Menggunakan Jaringan Nirkabel Sebagai Pengendali Secara Manual ini dapat diperoleh dari dua cara, secara otomatis dengan memanfaatkan sensor ultrasonik dan manual melalui remote pengendali dengan jaringan nirkabel. Pada gambar blok diagram di atas terdapat saklar/switch yang hanya berfungsi untuk mengalirkan arus pada rangkaian ketika activator telah memasuki rangkaian. Cara yang pertama yaitu masukan secara otomatis menggunakan sensor ultrasonik yang mendeteksi jarak benda yang ada di depannya dengan cara memancarkan gelombang suara dan menangkap kembali gelombang yang telah dipancarkan sesuai dengan waktu di dalam program, sehingga akan diperoleh data jarak dari setiap objek yang dideteksi. Jarak tersebut dijadikan acuan untuk memberikan input pada arduino. Masukan secara manual adalah dengan mengirimkan data melalui remote
pengendali dengan jaringan nirkabel RF 27MHz.
Gambar 3.2. Blok masukan otomatis dan pemancar/transmitter
Masukan lainnya pada rangkaian robot pengintai dengan pengendalian secara otomatis berbasis arduino uno dan menggunakan jaringan nirkabel sebagai pengendali secara manual ini, terdapat sensor LDR yang digunakan untuk mendeteksi intensitas cahaya dalam ruangan dan sebuah kamera wireless untuk memantau keadaan di daerah sekitarnya.
Gambar 3.3. Blok rangkaian LDR Analisa Blok Proses
Pada blok proses ini masukan data dari sensor ultrasonik berupa representasi jarak yang dikirim melalui pin SIG diterima oleh arduino pada pin digital 7. Di dalam arduino terdapat mikrokontroler ATMega328 yang akan memproses setiap masukan sesuai dengan kondisi logika pemrograman yang telah di
flash/download sebelumnya. Bisa kita lihat
pada blok diagram di atas, setelah mikrokontroler pada arduino memproses setiap masukan dari sensor ultrasonik, maka hasil akan keluar melalui pin digital
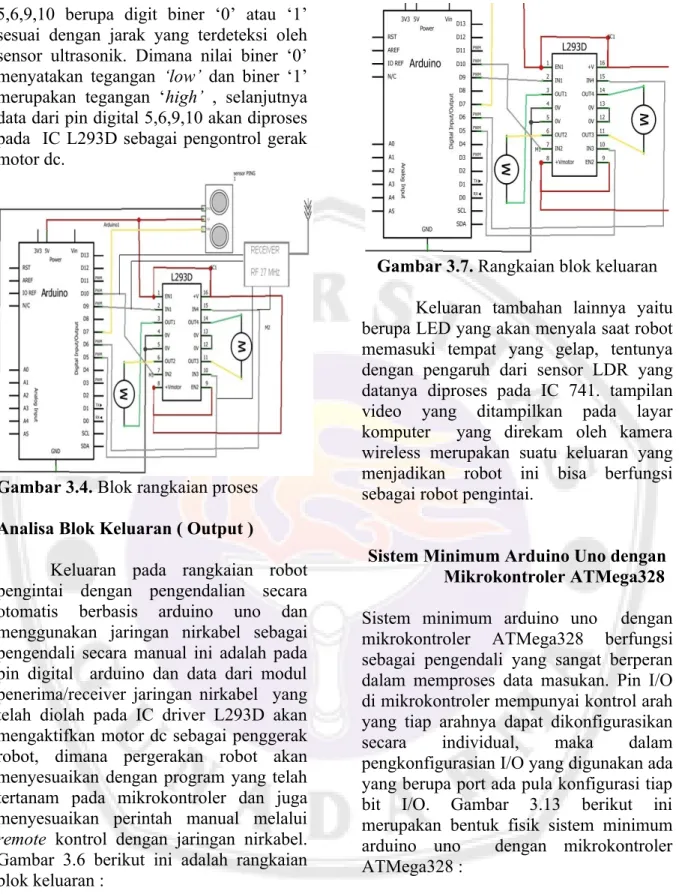
5,6,9,10 berupa digit biner ‘0’ atau ‘1’ sesuai dengan jarak yang terdeteksi oleh sensor ultrasonik. Dimana nilai biner ‘0’ menyatakan tegangan ‘low’ dan biner ‘1’ merupakan tegangan ‘high’ , selanjutnya data dari pin digital 5,6,9,10 akan diproses pada IC L293D sebagai pengontrol gerak motor dc.
Gambar 3.4. Blok rangkaian proses Analisa Blok Keluaran ( Output )
Keluaran pada rangkaian robot pengintai dengan pengendalian secara otomatis berbasis arduino uno dan menggunakan jaringan nirkabel sebagai pengendali secara manual ini adalah pada pin digital arduino dan data dari modul penerima/receiver jaringan nirkabel yang telah diolah pada IC driver L293D akan mengaktifkan motor dc sebagai penggerak robot, dimana pergerakan robot akan menyesuaikan dengan program yang telah tertanam pada mikrokontroler dan juga menyesuaikan perintah manual melalui
remote kontrol dengan jaringan nirkabel.
Gambar 3.6 berikut ini adalah rangkaian blok keluaran :
Gambar 3.7. Rangkaian blok keluaran Keluaran tambahan lainnya yaitu berupa LED yang akan menyala saat robot memasuki tempat yang gelap, tentunya dengan pengaruh dari sensor LDR yang datanya diproses pada IC 741. tampilan video yang ditampilkan pada layar komputer yang direkam oleh kamera wireless merupakan suatu keluaran yang menjadikan robot ini bisa berfungsi sebagai robot pengintai.
Sistem Minimum Arduino Uno dengan Mikrokontroler ATMega328 Sistem minimum arduino uno dengan mikrokontroler ATMega328 berfungsi sebagai pengendali yang sangat berperan dalam memproses data masukan. Pin I/O di mikrokontroler mempunyai kontrol arah yang tiap arahnya dapat dikonfigurasikan secara individual, maka dalam pengkonfigurasian I/O yang digunakan ada yang berupa port ada pula konfigurasi tiap bit I/O. Gambar 3.13 berikut ini merupakan bentuk fisik sistem minimum arduino uno dengan mikrokontroler ATMega328 :
Gambar 3.13. bentuk fisik sistem minimum arduino uno dengan mikrokontroler ATMega328
Berikut ini merupakan konfigurasi pin yang digunakan dalam sistem minimum arduino uno pada pembuatan robot pengintai :
• Pin digital 7 digunakan sebagai penerima masukan dari pin SIG dari sensor ultrasonik.
• Pin digital 5 digunakan sebagai output yang akan dihubungkan dengan pin 10 (input 3) pada IC L293D.
• Pin digital 6 digunakan sebagai output yang akan dihubungkan dengan pin 15 (input 4) pada IC L293D.
• Pin digital 9 digunakan sebagai output yang akan dihubungkan dengan pin 2 (input 1) pada IC L293D.
• Pin digital 10 digunakan sebagai output yang akan dihubungkan dengan pin 7 (input 2) pada IC L293D.
Pin digital yang dihubungkan pada IC L293D digunakan untuk pengiriman data berupa bit-bit biner yang akan diproses oleh IC L293D untuk menggerakan motor dc pada robot.
Perancangan Perangkat Lunak (Software)
Perancangan software ini akan membahas mengenai logika proses Robot Pengintai Dengan Pengendalian Secara Otomatis Berbasis Arduino Uno dan Menggunakan
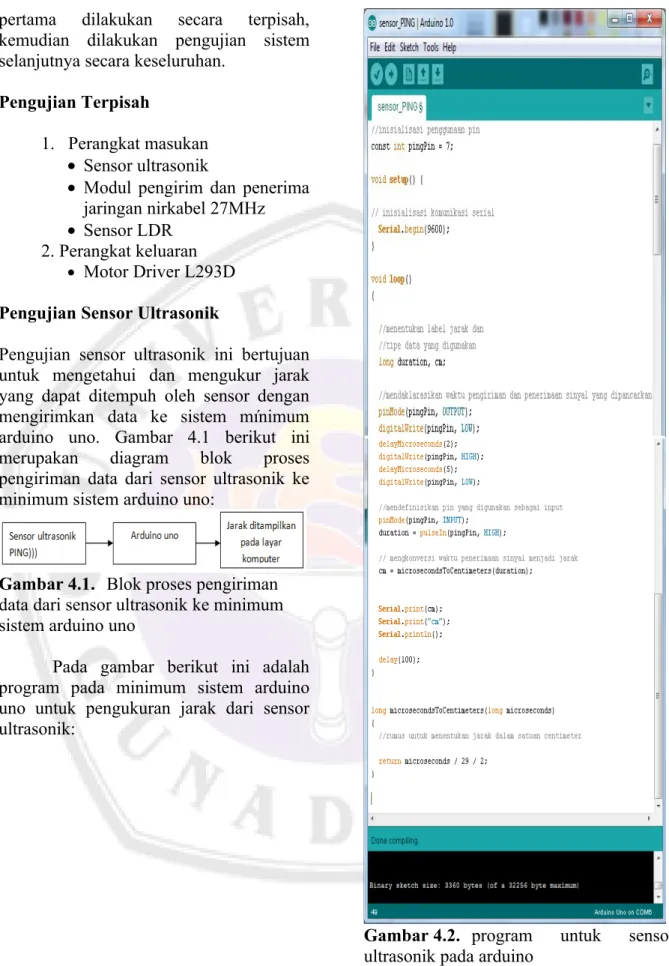
Jaringan Nirkabel Sebagai Pengendali Secara Manual. Untuk mempermudah pembuatan program, penulis terlebih dahulu membuat diagram alur atau biasa juga disebut dengan flowchart. Flowchart ini dimaksudkan sebagai pemandu Penulis dalam membuat program agar kesalahan dapat diminimalisir, juga bertujuan agar program yang dibuat merupakan suatu algoritma yang tepat. Diagram alur program Robot Pengintai Dengan Pengendalian Secara Otomatis dan Manual Berbasis Arduino Uno ditunjukkan dalam Gambar 3.14, berikut ini :
Gambar 3.14. Diagram alur program
HASIL UJI COBA ALAT
Pengujian alat Robot Pengintai Dengan Pengendalian Secara Otomatis Berbasis Arduino Uno dan Menggunakan Jaringan Nirkabel Sebagai Pengendali Secara Manual ini dilaksanakan untuk mengetahui apakah sistem sudah sesuai dengan perencanaan atau belum. Pengujian
pertama dilakukan secara terpisah, kemudian dilakukan pengujian sistem selanjutnya secara keseluruhan.
Pengujian Terpisah
1. Perangkat masukan
• Sensor ultrasonik
• Modul pengirim dan penerima jaringan nirkabel 27MHz
• Sensor LDR 2. Perangkat keluaran
• Motor Driver L293D Pengujian Sensor Ultrasonik
Pengujian sensor ultrasonik ini bertujuan untuk mengetahui dan mengukur jarak yang dapat ditempuh oleh sensor dengan mengirimkan data ke sistem mínimum arduino uno. Gambar 4.1 berikut ini merupakan diagram blok proses pengiriman data dari sensor ultrasonik ke minimum sistem arduino uno:
Gambar 4.1. Blok proses pengiriman data dari sensor ultrasonik ke minimum sistem arduino uno
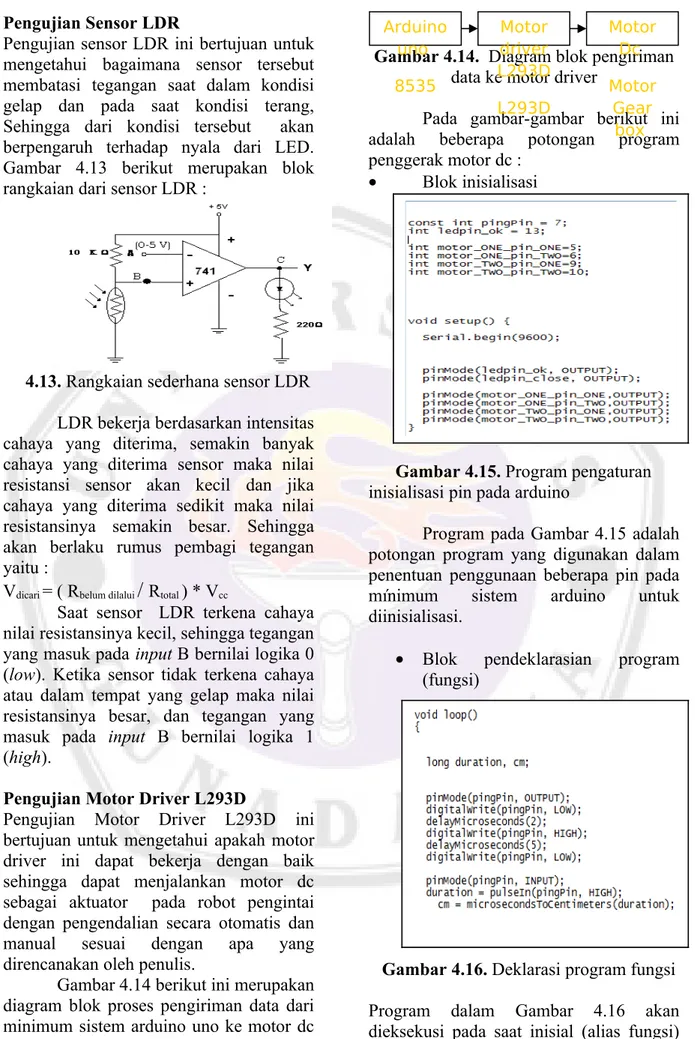
Pada gambar berikut ini adalah program pada minimum sistem arduino uno untuk pengukuran jarak dari sensor ultrasonik:
Gambar 4.2. program untuk sensor ultrasonik pada arduino
Pengujian dilakukan dengan cara menguhubungkan pin SIG pada sensor ultrasonik dengan pin digital 7 pada
mínimum sistem arduino uno, dimana tampilan jarak yang terdeteksi sensor dapat dilihat pada layar komputer dengan menghubungkan kabel USB arduino ke komputer itu sendiri. Jarak dapat ditampilkan dengan bantuan software arduino, sehingga dapat diamati dengan jelas. Berikut beberapa gambar yang menampilkan jarak tempuh sensor ultrasonik sesuai dengan kondisi saat robot melakukan tugasnya :
Gambar 4.3. Tampilan sensor ultrasonik mendeteksi jarak 25 cm pada komputer
Dari hasil uji coba terhadap sensor ultrasonik untuk mengukur jarak suatu objek, ternyata setelah dilakukan pengujian dengan membandingkan jarak yang diukur secara manual mendapatkan hasil yang berbeda.
Pengujian Modul Pengirim dan Penerima Jaringan Nirkabel 27MHz Pengujian modul pengirim dan penerima jaringan nirkabel 27MHz ini bertujuan ntuk mengetahui dan mengukur jarak remote pengendali (modul pengirim) dengan modul penerima yang akan dijadikan data input ke motor driver L293D.
Gambar 4.4 berikut ini merupakan diagram blok proses pengiriman data melalui jaringan nirkabel ke motor driver L293D:
Gambar 4.4 Diagram blok pengiriman data ke motor driver L293D
Pengujian jaringan nirkabel dilakukan dengan melakukan pengamatan di oscilloscope frekuensi yang dipancarkan oleh modul frekuensi. Pengujian dilakukan dengan menggunakan digital trainer dimana pin-pin dari modul penerima dihubungkan langsung ke pin oscilloscope secara bergantian. Time/div yang digunakan adalah 0,05 µs dan volt/div nya 2 V.
Gambar 4.5 dan 4.6 berikut ini menampilkan bentuk gelombang sinyal di layar oscilloscope saat pengujian dengan arah tombol kiri dari jaringan nirkabel 27MHz:
Gambar 4.5. Frekuensi yang dihasilkan
untuk arah tombol kiri
Gambar 4.6. Sinyal data biner dengan frekuensi yang dihasilkan
Gambar 4.7 dan 4.8 berikut ini menampilkan bentuk gelombang sinyal di layar oscilloscope saat pengujian dengan arah tombol kanan dari jaringan nirkabel 27MHz: Modul Pengiri m (Trans mitter) Modul Peneri ma (Receiv er) Motor driver L293D ATMeg a 8535
Gambar 4.7. Frekuensi yang dihasilkan untuk untuk arah tombol kanan
Gambar 4.8. Sinyal data biner dengan frekuensi yang dihasilkan
Gambar 4.9 dan 4.10 berikut ini menampilkan bentuk gelombang sinyal di layar oscilloscope saat pengujian dengan arah tombol bawah dari jaringan nirkabel 27MHz :
Gambar 4.9. Frekuensi yang dihasilkan untuk arah tombol bawah
Gambar 4.10 Sinyal data biner dengan frekuensi yang dihasilkan
Gambar 4.11 dan 4.12 berikut ini menampilkan bentuk gelombang sinyal di layar oscilloscope saat pengujian dengan arah tombol atas dari jaringan nirkabel 27MHz:
Gambar 4.11. Frekuensi yang dihasilkan untuk arah tombol atas
Gambar 4.12. Sinyal data biner dengan frekuensi yang dihasilkan
Dari hasil pengujian didapat periode gelombang rapat adalah sekitar 0,035 µs (T1) dan periode untuk gelombang renggang adalah 0,08 µs (T2) sehingga frekuensi yang dihasilkan adalah : MHz S f T f 57 , 28 035 , 0 1 1 1 1 = = = µ Untuk gelombang rapat MHz S f T f 5 , 12 08 , 0 1 1 2 2 = = = µ Untuk gelombang renggang
Frekuensi-frekuensi ini yang dihasilkan oleh modul jaringan nirkabel 27 MHz dengan teknik modulasi yang digunakan yaitu FSK (Frequency Shift Keying).
Pengujian Sensor LDR
Pengujian sensor LDR ini bertujuan untuk mengetahui bagaimana sensor tersebut membatasi tegangan saat dalam kondisi gelap dan pada saat kondisi terang, Sehingga dari kondisi tersebut akan berpengaruh terhadap nyala dari LED. Gambar 4.13 berikut merupakan blok rangkaian dari sensor LDR :
4.13. Rangkaian sederhana sensor LDR LDR bekerja berdasarkan intensitas cahaya yang diterima, semakin banyak cahaya yang diterima sensor maka nilai resistansi sensor akan kecil dan jika cahaya yang diterima sedikit maka nilai resistansinya semakin besar. Sehingga akan berlaku rumus pembagi tegangan yaitu :
Vdicari = ( Rbelum dilalui
/
Rtotal ) * VccSaat sensor LDR terkena cahaya nilai resistansinya kecil, sehingga tegangan yang masuk pada input B bernilai logika 0 (low). Ketika sensor tidak terkena cahaya atau dalam tempat yang gelap maka nilai resistansinya besar, dan tegangan yang masuk pada input B bernilai logika 1 (high).
Pengujian Motor Driver L293D
Pengujian Motor Driver L293D ini bertujuan untuk mengetahui apakah motor driver ini dapat bekerja dengan baik sehingga dapat menjalankan motor dc sebagai aktuator pada robot pengintai dengan pengendalian secara otomatis dan manual sesuai dengan apa yang direncanakan oleh penulis.
Gambar 4.14 berikut ini merupakan diagram blok proses pengiriman data dari minimum sistem arduino uno ke motor dc melalui pengendali motor IC L293D :
Gambar 4.14. Diagram blok pengiriman data ke motor driver
Pada gambar-gambar berikut ini adalah beberapa potongan program penggerak motor dc :
• Blok inisialisasi
Gambar 4.15. Program pengaturan inisialisasi pin pada arduino
Program pada Gambar 4.15 adalah potongan program yang digunakan dalam penentuan penggunaan beberapa pin pada mínimum sistem arduino untuk diinisialisasi.
• Blok pendeklarasian program (fungsi)
Gambar 4.16. Deklarasi program fungsi Program dalam Gambar 4.16 akan dieksekusi pada saat inisial (alias fungsi)
Arduino uno 8535 Motor driver L293D L293D Motor Dc Motor Gear box
dipanggil pada sub program selanjutnya, drive_belok_kiri( ) merupakan nama samaran/inisial untuk sebuah fungsi yang dipanggil, dimana terjadi bit-bit tertentu yang akan terhubung dengan IC L293D yang akan mengirimkan nilai-nilai bit biner sehingga pergerakan motor dapat diatur dengan mudah.
Berikut ini adalah gambar program fungsi yang akan dipanggil pada program utama :
• Blok fungsi yang dipanggil
Gambar 4.17. Program fungsi yang dipanggil
PENUTUP
KesimpulanSetelah melakukan perencanaan dan pembuatan sistem, pengujian dan analisanya, maka dapat diambil beberapa kesimpulan tentang sistem kerja dari Robot Pengintai Dengan Pengendalian Secara Otomatis Berbasis Arduino Uno dan Menggunakan Jaringan Nirkabel Sebagai Pengendali Secara Manual yang dibuat oleh Penulis, antara lain:
1. Jarak yang terdeteksi oleh sensor ultrasonik berbeda dengan jarak sesungguhnya. Hasil rata-rata kesalahan jarak yang dideteksi oleh sensor ultrasonik mencapai 0,47 cm, dan sensor ultrasonik mulai kurang presisi mendeteksi objek ketika robot dalam posisi miring dengan sudut elevasi ≥ 25o. sensor ultrasonik pada robot juga tidak mampu mendeteksi objek dengan ketinggian ≤ 3 cm.
2. Penggunaan dua buah motor dc dapat mengoptimalkan pergerakkan sebuah robot. Tegangan masukan ke motor dc yang diberikan oleh motor driver L293D tidak selalu sama, saat dilakukan pengujian setiap pergerakan seperti maju, mundur ataupun berbelok membutuhkan daya yang berbeda-beda.
3. Proses dan desain mekanik dari robot pengintai ini dapat berfungsi dengan baik, pergerakan seperti maju, mundur, berbelok telah bekerja sesuai program, dan robot telah mampu mengintai secara otomatis, serta robot juga telah bisa dikendalikan secara manual dengan menggunakan jaringan nirkabel RF 27MHz.
Saran
Berdasarkan pembuatan, pengoperasian, dan hasil dari pengujian Robot Pengintai Dengan Pengendalian Secara Otomatis
Berbasis Arduino Uno dan Menggunakan Jaringan Nirkabel Sebagai Pengendali Secara Manual, maka penulis memiliki beberapa saran untuk penyempurnaan alat ini, yaitu:
1.Untuk mendapatkan performa yang lebih baik pada sistem dan cara kerja robot pengintai dapat menambahkan lebih dari satu sensor ultrasonik pada badan robot agar pendeteksian jarak bisa lebih akurat, sehingga halangan yang ada di depan robot dapat dihindari dengan baik meskipun robot dalam keadaan miring.
2.Sistem kelistrikan pada robot cenderung memakan daya baterai yang banyak, sehingga daya baterai akan cepat habis. Untuk pengembangan selanjutnya gunakan baterai yang memiliki daya tahan lama dan tentunya ringan, agar beban robot akan sedikit berkurang. 3.Usulan untuk pengembangan alat
berikutnya yaitu pada bagian roda bisa diganti dengan roda jenis tank, sehingga robot dapat berjalan di segala medan.
4.Penggunaan kamera wireless yang memiliki jangkauan yang lebih luas sangat membantu keakuratan robot dalam melakukan pengintaian dari jarak jauh.
5.Dalam perancangan software, untuk mendapatkan program sebaik mungkin harus mengadakan percobaan berkali- kali karena untuk mensinkronkan perangkat lunak dengan sensor ultrasonik dan motor penggerak robot kadang mengalami ketidaksesuaian.
DAFTAR PUSTAKA
[1] Anonim, Modul Panduan Praktikum Sistem Tertanam, Laboraturium Menengah
Elektronika Komputer Universitas Gunadarma, Depok, 2009.
[2] Anonim, Tutorial Dasar Praktikum Sistem Tertanam, Laboraturium Menengah Elektronika Komputer Universitas Gunadarma, Depok, 2009. [3] Anonim, www.alldatasheet.com/datasheetpd f//SILAN/RX2B.html [4] Anonim, www.innovativeelectronics.com. [5] Anonim, www.arduino.cc. [6] Anonim, www.parallax.com. [7] Anonim, www.saung.igoscenter.org/Kupas_t untas_arduino#Pengertian.
[7] Budiharto, Widodo, Perancangan
Sistem dan Aplikasi
Mikrokontroler, Elex Media Komputindo, Jakarta, 2005.
[8] Chandra, Franky, dan Arifianto, Deni, Jago Elektronika Rangkaian Sistem Otomatis, PT. Kawan Pustaka, 2010.
[9] Nugroho Adi, Agung,
Mekatronika, Graha Ilmu, Yogyakarta, 2010.
[10] Wiyono, Didik, S.T., Panduan Praktis Mikrokontroler Keluarga AVR, Innovative Electronics, Surabaya, 2007.