Abstrak— Penelitian ini membahas masalah pengaturan keluaran frekuensi tegangan terbangkit pada sistem simulator pembangkit listrik generator set (genset) 1 phasa. Generator set (genset) direpresentasikan dengan model matematis yang diperoleh dari hasil identifikasi. Berdasarkan kenyataan bahwa selalu terjadi ketidakpastian parameter (uncertain parameter) dari plant, digunakan metode QFT (Quantitative Feedback
Theory) untuk mendapatkan desain kompensator yang dipasang
seri dengan plant agar keluaran frekuensi generator selalu berada di nilai tertentu pada beban yang berubah-ubah. Kestabilan dari keseluruhan sistem loop tertutup diselidiki menggunakan diagram bode, Rootlocus, dan diagram Nichols. Kompensator hasil desain diaplikasikan pada sistem simulator pembangkit. Hasil simulasi serta implementasi Kompensator pada generator set (genset) menunjukkan bahwa keluaran respon frekuensi mampu mengikuti respon yang diharapkan.
Kata Kunci—Genset, Frequency, Quantitative Feedback Theory, Uncertain parameter..
I. PENDAHULUAN
ADA pembangkitan tenaga listrik, gangguan pada sistem yang disebabkan oleh perubahan beban mengakibatkan fluktuasi pada nilai frekuensi. Apabila kenaikan frekuensi diluar batas yaitu sebesar 5% akan memicu terjadinya overheating yang berdampak pada kerusakan generator dan transformer[1]. Untuk itu diperlukan pengaturan frekuensi tegangan terbangkit dari generator yang bertujuan menjaga keseimbangan antara daya aktif yang dikonsumsi dan dihasilkan pada sistem daya seperti frekuensi yang tetap dalam batas yang dapat diterima di sekitar nilai nominal [2].
Persoalan klasik dalam sistem kontrol otomatis adalah mendesain sistem kontrol pada suatu plant agar dapat memenuhi performasi yang diinginkan. Kontroler didesain berdasarkan pada model dinamik dari objek (plant) yang hendak dikontrol. Parameter model diperoleh baik dengan perhitungan, pengukuran, ataupun melalui proses identifikasi sistem dan berbagai metode kontrol dikembangkan untuk memecahkan permasalahan yang ditemui pada plant.
Kontroler Proporsional-Integral-Diferential (PID) telah dikenal secara luas penggunaanya sebagai pengendali sistem penggerak dan memiliki tingkat kemantapan yang baik. Namun, perancangan kontroler PID dengan metode konvensional belum mampu mengatasi ketidakpastian parameter dengan sangat baik. Sehingga diperlukan suatu pendekatan perancangan desain kontrol yang mampu mengatasi ketidakpastian parameter plant dengan lebih baik.
Beberapa penelitian telah dilakukan untuk mengaplikasikan metode kontrol cerdas dalam kontrol frekuensi. Penerapan Fuzzy Logic Controller[3], Artificial Neural Network[4], hingga penerapan metode Genetic Algorithm[5] untuk menentukan parameter PID telah menunjukkan hasil yang cukup akurat dan respon yang baik terhadap gangguan dibandingkan dengan metode konvensional.
Salah satu metode perancangan sistem adalah dengan menggunakan metode Quantitative Feedback Theory (QFT) yang diperkenalkan oleh Profesor Horowitz. Quantitative Feedback Theory merupakan perkembangan lebih lanjut dari prinsip kontrol klasik yang menggunakan analisis dalam domain frekuensi. QFT mampu mengatasi ketidakpastian parameter model plant karena mengasumsikan ketidakpastian tersebut dalam sekumpulan template pada bidang kompleks. Tiap template membawa informasi tentang gain dan phase pada tiap frekuensi. Spesifikasi desain dinyatakan sebagai batasan-batasan yang diijinkan dalam domain frekuensi dan digambarkan dalam diagram nichols. Kelebihan dari diagram nichols adalah makin mudahnya proses trade off antara variasi dari open loop dengan closed loop sehingga akan memudahkan desain dalam domain frekuensi.
Pembahasan dalam tugas akhir ini diharapkan dapat memberikan gambaran dan contoh mengenai teknik perancangan Quantitative Feedback Theory dalam memenuhi spesifikasi yang diinginkan dari plant yang mengandung ketidakpastian atau variasi parameter didalamnya. Diharapkan tugas akhir ini dapat digunakan sebagai salah satu kajian dalam pengembangan teori kontrol pada plant secara luas dan lebih kompleks.
II. DASAR TEORI
A. Sistem Pengaturan Generator
Secara garis besar sistem pengaturan generator dibagi menjadi beberapa sub pokok bahasan diantaranya pengaturan prime mover dan eksitasi . Kontrol prime mover dikaitkan dengan pengaturan kecepatan dan variasi energy yang disuplai ke sistem Sedangkan kontrol eksitasi berhubungan dengan pengaturan tegangan generator dan output daya reaktif.
Namun yang akan dibahas pada penelitian tugas akhir ini adalah sistem pengaturan frekuensi.
B. Sistem Pengaturan Frekuensi
Sistem pengaturan frekuensi yaitu sistem pengaturan yang mengatur frekuensi tegangan terbangkit untuk sebagai
Perancangan dan Implementasi Kompensator dengan Metode
Quantitative Feedback Theory pada Motor Bakar 4-tak Kapasitas 1
KVA untuk Kendali Frekuensi Tegangan Terbangkit
Alfin Hidayat
1)Mochammad Rameli
2)Rusdhianto Effendie A.K.
3)1) Jurusan Teknik Elektro ITS, Surabaya 60111, email: a l f i n _ 1 4 6 @ e l e c t - e n g . i t s . a c . i d 2) Jurusan Teknik Elektro ITS, Surabaya 60111, email: [email protected] 3) Jurusan Teknik Elektro ITS, Surabaya 60111, email: [email protected]
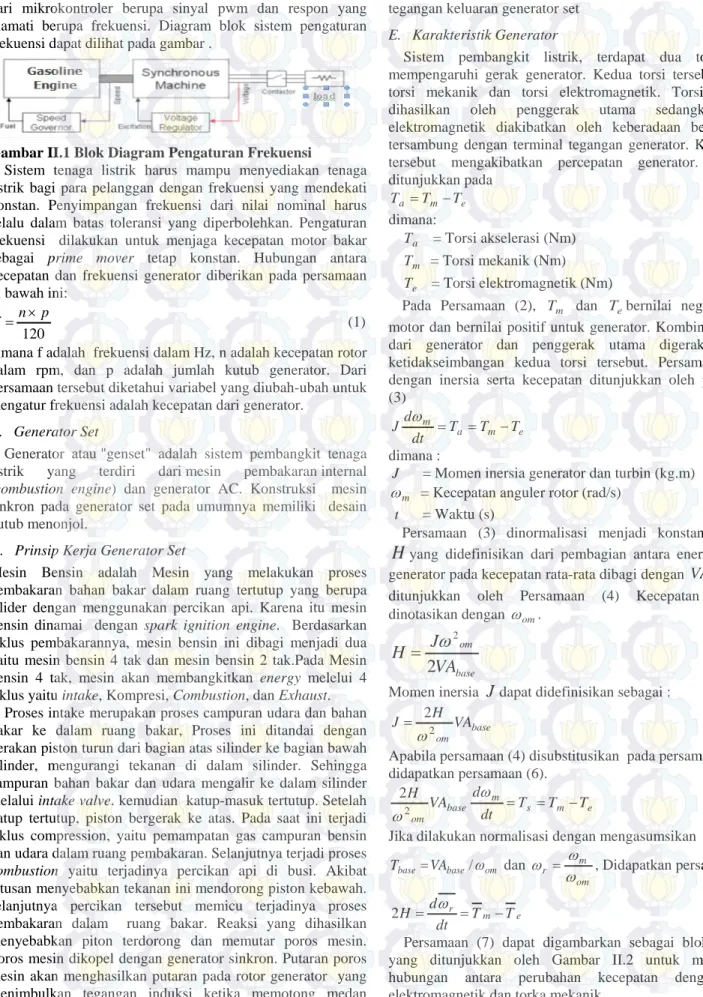
bahasan utamanya. Pada sistem ini masukkan sistem berasal dari mikrokontroler berupa sinyal pwm dan respon yang diamati berupa frekuensi. Diagram blok sistem pengaturan frekuensi dapat dilihat pada gambar .
Gambar II.1 Blok Diagram Pengaturan Frekuensi
Sistem tenaga listrik harus mampu menyediakan tenaga listrik bagi para pelanggan dengan frekuensi yang mendekati konstan. Penyimpangan frekuensi dari nilai nominal harus selalu dalam batas toleransi yang diperbolehkan. Pengaturan frekuensi dilakukan untuk menjaga kecepatan motor bakar sebagai prime mover tetap konstan. Hubungan antara kecepatan dan frekuensi generator diberikan pada persamaan di bawah ini:
120 p n
f = × (1) dimana f adalah frekuensi dalam Hz, n adalah kecepatan rotor dalam rpm, dan p adalah jumlah kutub generator. Dari persamaan tersebut diketahui variabel yang diubah-ubah untuk mengatur frekuensi adalah kecepatan dari generator.
C. Generator Set
Generator atau "genset" adalah sistem pembangkit tenaga listrik yang terdiri dari mesin pembakaran internal
(combustion engine) dan generator AC. Konstruksi mesin
sinkron pada generator set pada umumnya memiliki desain kutub menonjol.
D. Prinsip Kerja Generator Set
Mesin Bensin adalah Mesin yang melakukan proses pembakaran bahan bakar dalam ruang tertutup yang berupa silider dengan menggunakan percikan api. Karena itu mesin bensin dinamai dengan spark ignition engine. Berdasarkan siklus pembakarannya, mesin bensin ini dibagi menjadi dua yaitu mesin bensin 4 tak dan mesin bensin 2 tak.Pada Mesin bensin 4 tak, mesin akan membangkitkan energy melelui 4 siklus yaitu intake, Kompresi, Combustion, dan Exhaust.
Proses intake merupakan proses campuran udara dan bahan bakar ke dalam ruang bakar, Proses ini ditandai dengan gerakan piston turun dari bagian atas silinder ke bagian bawah silinder, mengurangi tekanan di dalam silinder. Sehingga campuran bahan bakar dan udara mengalir ke dalam silinder melalui intake valve. kemudian katup-masuk tertutup. Setelah katup tertutup, piston bergerak ke atas. Pada saat ini terjadi siklus compression, yaitu pemampatan gas campuran bensin dan udara dalam ruang pembakaran. Selanjutnya terjadi proses combustion yaitu terjadinya percikan api di busi. Akibat letusan menyebabkan tekanan ini mendorong piston kebawah. selanjutnya percikan tersebut memicu terjadinya proses pembakaran dalam ruang bakar. Reaksi yang dihasilkan menyebabkan piton terdorong dan memutar poros mesin. Poros mesin dikopel dengan generator sinkron. Putaran poros mesin akan menghasilkan putaran pada rotor generator yang menimbulkan tegangan induksi ketika memotong medan
magnet stator. Tegangan induksi inilah yang akan menjadi tegangan keluaran generator set
E. Karakteristik Generator
Sistem pembangkit listrik, terdapat dua torsi yang mempengaruhi gerak generator. Kedua torsi tersebut adalah torsi mekanik dan torsi elektromagnetik. Torsi mekanik dihasilkan oleh penggerak utama sedangkan torsi elektromagnetik diakibatkan oleh keberadaan beban yang tersambung dengan terminal tegangan generator. Kedua torsi tersebut mengakibatkan percepatan generator. Hal ini ditunjukkan pada e m a T T T = − (2) dimana: a T = Torsi akselerasi (Nm) m T = Torsi mekanik (Nm) e T = Torsi elektromagnetik (Nm)
Pada Persamaan (2), Tm dan Tebernilai negatif untuk
motor dan bernilai positif untuk generator. Kombinasi inersia dari generator dan penggerak utama digerakkan oleh ketidakseimbangan kedua torsi tersebut. Persamaan gerak dengan inersia serta kecepatan ditunjukkan oleh persamaan (3) e m a m T T T dt d J ω = = − (3) dimana :
J = Momen inersia generator dan turbin (kg.m)
m
ω
= Kecepatan anguler rotor (rad/s)
t = Waktu (s)
Persamaan (3) dinormalisasi menjadi konstanta inersia
H
yang didefinisikan dari pembagian antara energy kinetik generator pada kecepatan rata-rata dibagi dengan VAbase yangditunjukkan oleh Persamaan (4) Kecepatan rata-rata dinotasikan dengan ω . om base om
VA
J
H
2
2ω
=
(4) Momen inersiaJ
dapat didefinisikan sebagai :base om VA H J 2 2 ω = (5) Apabila persamaan (4) disubstitusikan pada persamaan (5) didapatkan persamaan (6). e m s m base om T T T dt d VA H ω = = − ω2 2 (6) Jika dilakukan normalisasi dengan mengasumsikan
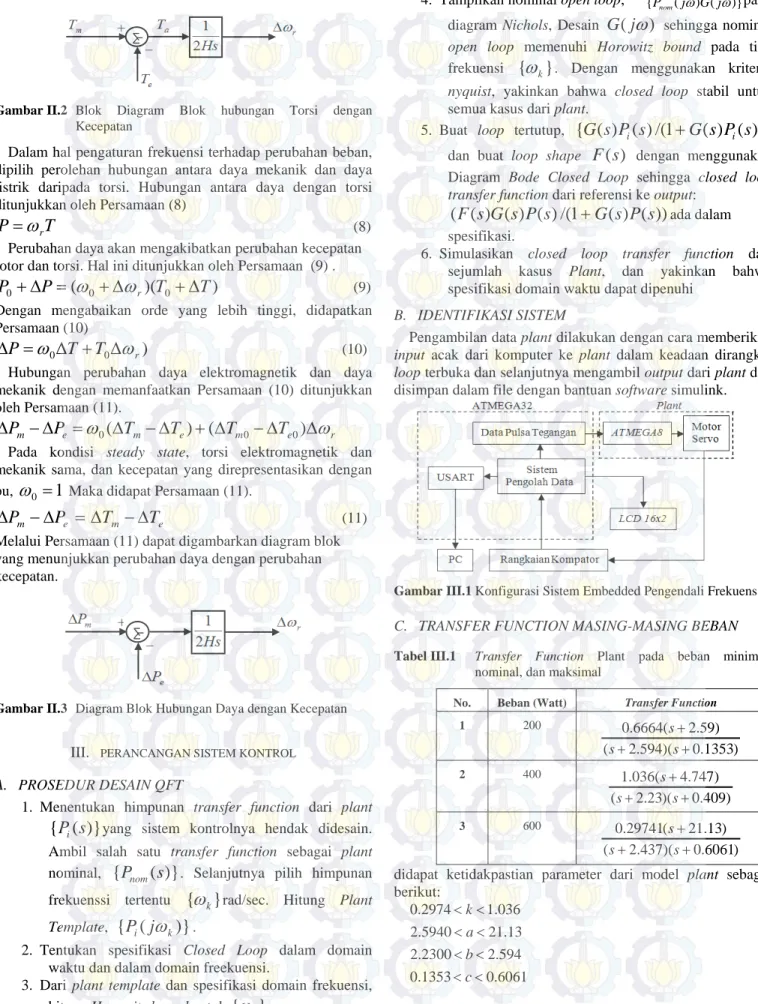
om base base VA T = /ω dan om m r ω ω ω = , Didapatkan persamaan e m r T T dt d H= ω = − 2 (7) Persamaan (7) dapat digambarkan sebagai blok diagram yang ditunjukkan oleh Gambar II.2 untuk menujukkan hubungan antara perubahan kecepatan dengan torka elektromagnetik dan torka mekanik
∑ ∑
Gambar II.2 Blok Diagram Blok hubungan Torsi dengan
Kecepatan
Dalam hal pengaturan frekuensi terhadap perubahan beban, dipilih perolehan hubungan antara daya mekanik dan daya listrik daripada torsi. Hubungan antara daya dengan torsi ditunjukkan oleh Persamaan (8)
T
P
=
ω
r (8) Perubahan daya akan mengakibatkan perubahan kecepatan rotor dan torsi. Hal ini ditunjukkan oleh Persamaan (9) .)
)(
(
0 00
P
T
T
P
+
∆
=
ω
+
∆
ω
r+
∆
(9) Dengan mengabaikan orde yang lebih tinggi, didapatkan Persamaan (10))
0 0T
T
rP
=
ω
∆
+
∆
ω
∆
(10)Hubungan perubahan daya elektromagnetik dan daya mekanik dengan memanfaatkan Persamaan (10) ditunjukkan oleh Persamaan (11). r e m e m e m
P
T
T
T
T
P
−
∆
=
ω
∆
−
∆
+
∆
−
∆
∆
ω
∆
0(
)
(
0 0)
Pada kondisi steady state, torsi elektromagnetik dan mekanik sama, dan kecepatan yang direpresentasikan dengan pu,ω
0=
1
Maka didapat Persamaan (11).e m e m
P
T
T
P
−
∆
=
∆
−
∆
∆
(11)Melalui Persamaan (11) dapat digambarkan diagram blok yang menunjukkan perubahan daya dengan perubahan kecepatan.
∑ ∑
Gambar II.3 Diagram Blok Hubungan Daya dengan Kecepatan
III. PERANCANGAN SISTEM KONTROL
A. PROSEDUR DESAIN QFT
1. Menentukan himpunan transfer function dari plant
)}
(
{
P
is
yang sistem kontrolnya hendak didesain.Ambil salah satu transfer function sebagai plant nominal,
{
P
nom(
s
)}
. Selanjutnya pilih himpunan frekuenssi tertentu{
ω
k}
rad/sec. Hitung Plant Template,{
P
i(
j
ω
k)}
.2. Tentukan spesifikasi Closed Loop dalam domain waktu dan dalam domain freekuensi.
3. Dari plant template dan spesifikasi domain frekuensi, hitung Horowitz bound untuk
{
ω
k}
.4. Tampilkan nominal open loop, {Pnom(jω)G(jω)}pada
diagram Nichols, Desain
G
(
j
ω
)
sehingga nominal open loop memenuhi Horowitz bound pada tiap frekuensi{
ω
k}
. Dengan menggunakan kriteria nyquist, yakinkan bahwa closed loop stabil untuk semua kasus dari plant.5. Buat loop tertutup,
{
G
(
s
)
P
i(
s
)
/(
1
+
G
(
s
)
P
i(
s
)}
, dan buat loop shapeF
(s
)
dengan menggunakan Diagram Bode Closed Loop sehingga closed loop transfer function dari referensi ke output:))
(
)
(
1
/(
)
(
)
(
)
(
(
F
s
G
s
P
s
+
G
s
P
s
ada dalam spesifikasi.6. Simulasikan closed loop transfer function dari sejumlah kasus Plant, dan yakinkan bahwa spesifikasi domain waktu dapat dipenuhi
B. IDENTIFIKASI SISTEM
Pengambilan data plant dilakukan dengan cara memberikan input acak dari komputer ke plant dalam keadaan dirangkai loop terbuka dan selanjutnya mengambil output dari plant dan disimpan dalam file dengan bantuan software simulink.
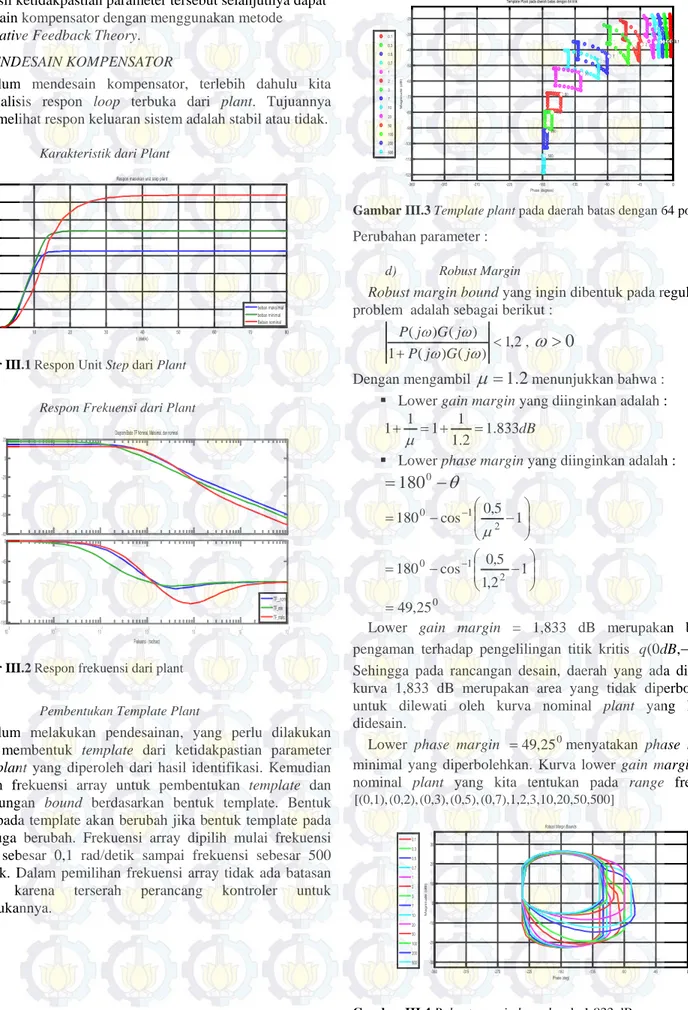
Gambar III.1 Konfigurasi Sistem Embedded Pengendali Frekuens C. TRANSFER FUNCTION MASING-MASING BEBAN Tabel III.1 Transfer Function Plant pada beban minimal,
nominal, dan maksimal
No. Beban (Watt) Transfer Function
1 200 ) 1353 . 0 )( 594 . 2 ( ) 59 . 2 ( 6664 . 0 + + + s s s 2 400 ) 409 . 0 )( 23 . 2 ( ) 747 . 4 ( 036 . 1 + + + s s s 3 600 ) 6061 . 0 )( 437 . 2 ( ) 13 . 21 ( 29741 . 0 + + + s s s
didapat ketidakpastian parameter dari model plant sebagai berikut: 6061 . 0 1353 . 0 594 . 2 2300 . 2 13 . 21 5940 . 2 036 . 1 2974 . 0 < < < < < < < < c b a k
Dari hasil ketidakpastian parameter tersebut selanjutnya dapat kita desain kompensator dengan menggunakan metode Quantitative Feedback Theory.
D. MENDESAIN KOMPENSATOR
Sebelum mendesain kompensator, terlebih dahulu kita menganalisis respon loop terbuka dari plant. Tujuannya adalah melihat respon keluaran sistem adalah stabil atau tidak.
a) Karakteristik dari Plant
0 10 20 30 40 50 60 70 80 0 1 2 3 4 5 6 7 8 t (detik) Respon masukan unit step plant
beban maksimal beban minimal Beban nominal
Gambar III.1 Respon Unit Step dari Plant
b) Respon Frekuensi dari Plant
-80 -60 -40 -20 0 20 M agni t ude ( dB ) 10-3 10-2 10-1 100 101 102 103 -180 -135 -90 -45 0 P has e ( deg)
Diagram Bode TF Nominal, Maksimal, dan nominal
Frekuensi (rad/sec)
TF__nom TF_min TF_maks
Gambar III.2 Respon frekuensi dari plant
c) Pembentukan Template Plant
Sebelum melakukan pendesainan, yang perlu dilakukan adalah membentuk template dari ketidakpastian parameter model plant yang diperoleh dari hasil identifikasi. Kemudian memilih frekuensi array untuk pembentukan template dan penghitungan bound berdasarkan bentuk template. Bentuk bound pada template akan berubah jika bentuk template pada plant juga berubah. Frekuensi array dipilih mulai frekuensi rendah sebesar 0,1 rad/detik sampai frekuensi sebesar 500 rad/detik. Dalam pemilihan frekuensi array tidak ada batasan khusus karena terserah perancang kontroler untuk menentukannya. -360 -315 -270 -225 -180 -135 -90 -45 0 -120 -110 -100 -90 -80 -70 -60 -50 -40 -30 -20 0.1 0.3 0.5 0.7 1 2 3 7 10 20 50 100 200 500 Phase (degrees) M agni tude ( dB )
Template Plant pada daerah batas dengan 64 titik
0.1 0.3 0.5 0.7 1 2 3 7 10 20 50 100 200 500
Gambar III.3 Template plant pada daerah batas dengan 64 point Perubahan parameter :
d) Robust Margin
Robust margin bound yang ingin dibentuk pada regulator problem adalah sebagai berikut :
2 , 1 ) ( ) ( 1 ) ( ) ( < + ω ω ω ω j G j P j G j P ,
ω
>
0
Dengan mengambil
µ
=
1
.
2
menunjukkan bahwa : Lower gain margin yang diinginkan adalah :dB 833 . 1 2 . 1 1 1 1 1+ = + = µ
Lower phase margin yang diinginkan adalah :
θ
−
=
0180
− − = − 1 5 , 0 cos 1800 1 2 µ − − = − 1 2 , 1 5 , 0 cos 180 2 1 0 0 25 , 49 =Lower gain margin = 1,833 dB merupakan batasan pengaman terhadap pengelilingan titik kritis q(0dB,−1800). Sehingga pada rancangan desain, daerah yang ada di dalam kurva 1,833 dB merupakan area yang tidak diperbolehkan untuk dilewati oleh kurva nominal plant yang hendak didesain.
Lower phase margin =49,250menyatakan phase margin minimal yang diperbolehkan. Kurva lower gain margin pada nominal plant yang kita tentukan pada range frekuensi
,500] 3,10,20,50 (0,7),1,2, (0,5), (0,3), (0,2), [(0,1), -360 -315 -270 -225 -180 -135 -90 -45 0 -30 -20 -10 0 10 20 30 Phase (deg) M agni t ude ( dB )
Robust Margin Bounds 0.1 0.3 0.5 0.7 1 2 3 7 10 20 50 100 200 500
Berdasarkan nominal plant yang dipilih pada template yang didesain, tiap kurva pada diagram tersebut mewakili 64 kurva lain yang identik yang mewakili adanya variasi model plant pada frekuensi yang sama.
e) Batasan tracking yang dibuat Desain tracking yang dibuat adalah
3306 . 12 1996 . 3 3306 . 12 ) ( ) ( 1 ) ( ) ( 2+ + ≤ +P j G j s s j G j P ω ω ω ω
Diharapkan desain mengikuti kriteria yang ditentukan, bound yang dibentuk dapat dilihat pada Gambar III.7
-360 -315 -270 -225 -180 -135 -90 -45 0 -100 -80 -60 -40 -20 0 20 40 60 80 Phase (deg) M agni tude ( dB )
Batasan tracking yang dibuat
0.1 0.2 0.3 0.5 0.7 1 2 3 200 500
Gambar III.5 Batasan tracking yang dibuat
f) Kumpulan dari seluruh batasan yang dibuat
-360 -315 -270 -225 -180 -135 -90 -45 0 -100 -80 -60 -40 -20 0 20 40 60 80 Phase (deg) M agni tude( dB )
Kumpulan dari seluruh batasan yang dibuat
0.1 0.2 0.3 0.5 0.7 1 2 3 7 10 20 50 100 200 500
Gambar III.6 Kumpulan dari seluruh batasan yang dibuat
g) Irisan dari semua batasan yang dibuat
-360 -315 -270 -225 -180 -135 -90 -45 0 -100 -80 -60 -40 -20 0 20 40 60 80 Phase (deg) M agni tude ( dB )
Irisan dari semua batasan yang dibuat
0.1 0.2 0.3 0.5 0.7 1 2 3 7 10 20 50 100 200 500
Gambar III.7 Irisan dari semua batasan yang dibuat
h) Hasil desain kompensator G(s) untuk plant P(s)
-360 -315 -270 -225 -180 -135 -90 -45 0 -100 -80 -60 -40 -20 0 20 40 60 80 Phase (deg) M agni t ude ( dB )
Desain Kompensator K(s) untuk Plant G(s)
0.1 0.2 0.3 0.5 0.7 1 2 3 7 10 20 50 100 200 500
Gambar III.8 Hasil desain kompensator G(s) untuk plant P(s)
Komponen-komponen yang ditambahkan untuk memperoleh hasil desain kompensator adalah sebagai berikut:
Gambar III.9 Elemen yang ditambahkan untuk kompensator
Desain kompensator G(s) yang ditambahkan ditentukan sebagai berikut : + + + = 1 759 , 3 1 459 , 0 1 807 , 2 08 , 32 ) ( s s s s s G
Sehingga diperoleh hasil akhir:
s s s s s G 759 , 3 38 , 55 6 , 141 93 , 45 ) ( 2 2 + + + =
IV. SIMULASIDANIMPLEMENTASI A. Uji Loop Tertutup untuk Plant
Dengan menggunakan hasil desain kompensator yang diperoleh dari sistem SISO plant genset, transfer function dari kompensator adalah sebagai berikut :
s s s s s G 759 , 3 38 , 55 6 , 141 93 , 45 ) ( 2 2 + + + =
Pengujian ini dilakukan untuk mengetahui apakah hasil desain kompensator sudah dapat mengendalikan respon plant terhadap masukan.
0 50 100 150 0 10 20 30 40 50 60 70 waktu (detik) F rek uens i ( H z )
Respon Plant dengan Kompensator
respon beban minimal respon beban nominal respon beban maksimal
Gambar IV.1 Respon Plant dengan Kompensator
Hasil uji loop tertutup dengan menggunakan kompensator K(s) dapat terlihat bahwa kontroler dapat bekerja untuk mempertahankan kondisi masukan pada plant P(s).
B. Uji Gangguan Terhadap Perubahan Beban
Uji ini dilakukan pada saat respon sistem dalam keadaan steady state, kemudian diberi gangguan dari luar yang dianggap sebagai perubahan parameter model dari plant, dalam hal ini adalah perubahan beban plant genset. Berikut ini adalah hasil perubahan respon plant dari beban nominal ke maksimal, beban nominal ke minimal, beban maksimal ke minimal, dan sebaliknya.
4500 5000 5500 6000 6500 7000 49.93 49.94 49.95 49.96 49.97 49.98 49.99 50 50.01
Respon perubahan beban dari nominal ke maksimal
Iterasi (Ts=0.01) F rr ek uens i ( H z )
Gambar IV.2 Respon perubahan dari beban nominal ke beban
maksimal 4500 5000 5500 6000 6500 7000 50 50.01 50.02 50.03 50.04 50.05 50.06 50.07
Respon perubahan beban dari maksimal ke nominal
Iterasi (Ts=0.01s) F rek uens i ( H z )
Gambar IV.3 Respon perubahan dari beban masksimal ke nominal
4500 5000 5500 6000 6500 7000 50 50.01 50.02 50.03 50.04 50.05 50.06 50.07
Respon perubahan dari beban nominal ke minimal
Iterassi (Ts=0.01s) fr ek uens i ( H z )
Gambar IV.4 Respon perubahan dari beban nominal ke minimal
4500 5000 5500 6000 6500 7000 49.94 49.95 49.96 49.97 49.98 49.99 50 50.01 50.02 Iterasi (Ts=0.01s) F rek uens i ( H z )
Respon perubahan beban minimal ke nominal
Gambar IV.5 Respon perubahan dari beban minimal ke nominal
4500 5000 5500 6000 6500 7000 50 50.02 50.04 50.06 50.08 50.1 50.12 Iterasi (Ts=0.01s) fr ek uens i ( H z )
Respon perubahan dari beban maksimal ke minimal
Gambar IV.6 Respon perubahan dari beban maksimal ke minimal
4500 5000 5500 6000 6500 7000 49.86 49.88 49.9 49.92 49.94 49.96 49.98 50 50.02 Iterasi (Ts=0.01s) Respon perubahan dari beban minimal ke maksimal
Gambar IV.7 Respon perubahan dari beban minimal ke maksimal
C. Implementasi Kompensator
Kompensator yang di desain diimplementasikan melalui program di Mikrokontroler ATMEGA32. Terlebih dahulu, hasil desain kompensator didiskritkan dalam program agar bisa terhubung dengan PC.
s s s s s G 759 , 3 38 , 55 6 , 141 93 , 45 ) ( 2 2 + + + =
Dengan menggunakan pendekatan diskrit bilinear dengan waktu saampling (Ts = 0.2 s), didapatkan Transfer Function diskrit dari kompensator sebagai berikut:
4536 , 0 454 , 1 49 , 23 96 , 65 08 , 44 ) ( 2 2 + − + − = z z z z z G
Dari TF diskrit diatas, dibuat persamaan beda dari kompensator, didapatkan persamaan sebagai berikut:
) 2 ( 49 . 23 ) 1 ( 96 . 65 ) ( 08 . 44 ) 2 ( 4536 . 0 ) 1 ( 454 . 1 ) ( − + − − + − − − = k e k e k e k u k u k u
dalam implementasinya, kompensator merupakan suatu persamaan beda yang terdiri atas beberapa suku. Algoritma kompensator terdiri dari operasi aritmatika dasar (perkalian, pembagian, penambahan, dan pengurangan) sehingga bisa diimplemetasikan dengan PC. Pada kasus ini, kompensator di implementasikan pada program di mikrokontroler ATmega32.
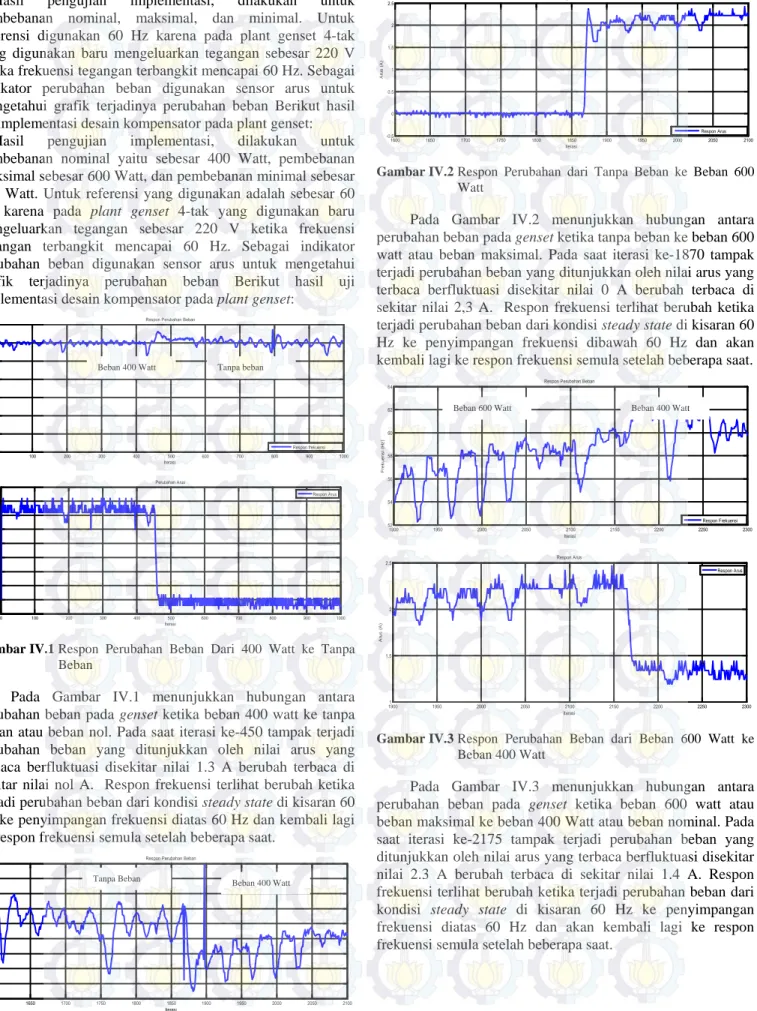
Hasil pengujian implementasi, dilakukan untuk pembebanan nominal, maksimal, dan minimal. Untuk referensi digunakan 60 Hz karena pada plant genset 4-tak yang digunakan baru mengeluarkan tegangan sebesar 220 V ketika frekuensi tegangan terbangkit mencapai 60 Hz. Sebagai indikator perubahan beban digunakan sensor arus untuk mengetahui grafik terjadinya perubahan beban Berikut hasil uji implementasi desain kompensator pada plant genset:
Hasil pengujian implementasi, dilakukan untuk pembebanan nominal yaitu sebesar 400 Watt, pembebanan maksimal sebesar 600 Watt, dan pembebanan minimal sebesar 200 Watt. Untuk referensi yang digunakan adalah sebesar 60 Hz karena pada plant genset 4-tak yang digunakan baru mengeluarkan tegangan sebesar 220 V ketika frekuensi tegangan terbangkit mencapai 60 Hz. Sebagai indikator perubahan beban digunakan sensor arus untuk mengetahui grafik terjadinya perubahan beban Berikut hasil uji implementasi desain kompensator pada plant genset:
0 100 200 300 400 500 600 700 800 900 1000 0 10 20 30 40 50 60 70 Iterasi F rek uens i ( H z )
Respon Perubahan Beban
Respon frekuensi 0 100 200 300 400 500 600 700 800 900 1000 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 Perubahan Arus Iterasi A ru s (A ) Respon Arus
Gambar IV.1 Respon Perubahan Beban Dari 400 Watt ke Tanpa
Beban
Pada Gambar IV.1 menunjukkan hubungan antara perubahan beban pada genset ketika beban 400 watt ke tanpa beban atau beban nol. Pada saat iterasi ke-450 tampak terjadi perubahan beban yang ditunjukkan oleh nilai arus yang terbaca berfluktuasi disekitar nilai 1.3 A berubah terbaca di sekitar nilai nol A. Respon frekuensi terlihat berubah ketika terjadi perubahan beban dari kondisi steady state di kisaran 60 Hz ke penyimpangan frekuensi diatas 60 Hz dan kembali lagi ke respon frekuensi semula setelah beberapa saat.
1600 1650 1700 1750 1800 1850 1900 1950 2000 2050 2100 50 52 54 56 58 60 62 64 66 68
Respon Perubahan Beban
Iterasi F rek uens i ( H z ) 1600 1650 1700 1750 1800 1850 1900 1950 2000 2050 2100 -0.5 0 0.5 1 1.5 2 2.5 Respon Arus Iterasi A ru s (A ) Respon Arus
Gambar IV.2 Respon Perubahan dari Tanpa Beban ke Beban 600
Watt
Pada Gambar IV.2 menunjukkan hubungan antara perubahan beban pada genset ketika tanpa beban ke beban 600 watt atau beban maksimal. Pada saat iterasi ke-1870 tampak terjadi perubahan beban yang ditunjukkan oleh nilai arus yang terbaca berfluktuasi disekitar nilai 0 A berubah terbaca di sekitar nilai 2,3 A. Respon frekuensi terlihat berubah ketika terjadi perubahan beban dari kondisi steady state di kisaran 60 Hz ke penyimpangan frekuensi dibawah 60 Hz dan akan kembali lagi ke respon frekuensi semula setelah beberapa saat.
1900 1950 2000 2050 2100 2150 2200 2250 2300 52 54 56 58 60 62 64 Iterasi F rek uens i ( H z )
Respon Perubahan Beban
Respon Frekuensi 19001 1950 2000 2050 2100 2150 2200 2250 2300 1.5 2 2.5 Iterasi A ru s (A ) Respon Arus Respon Arus
Gambar IV.3 Respon Perubahan Beban dari Beban 600 Watt ke
Beban 400 Watt
Pada Gambar IV.3 menunjukkan hubungan antara perubahan beban pada genset ketika beban 600 watt atau beban maksimal ke beban 400 Watt atau beban nominal. Pada saat iterasi ke-2175 tampak terjadi perubahan beban yang ditunjukkan oleh nilai arus yang terbaca berfluktuasi disekitar nilai 2.3 A berubah terbaca di sekitar nilai 1.4 A. Respon frekuensi terlihat berubah ketika terjadi perubahan beban dari kondisi steady state di kisaran 60 Hz ke penyimpangan frekuensi diatas 60 Hz dan akan kembali lagi ke respon frekuensi semula setelah beberapa saat.
Beban 400 Watt Tanpa beban
Tanpa Beban Beban 400 Watt
3900 4000 4100 4200 4300 4400 4500 54 56 58 60 62 64 66 68 Iterasi F rek uens i ( H z )
Respon Perubahan Beban
Respon Frekuensi 39000 4000 4100 4200 4300 4400 4500 0.5 1 1.5 2 2.5 Iterasi A ru s (A ) Respon Arus Respon Arus
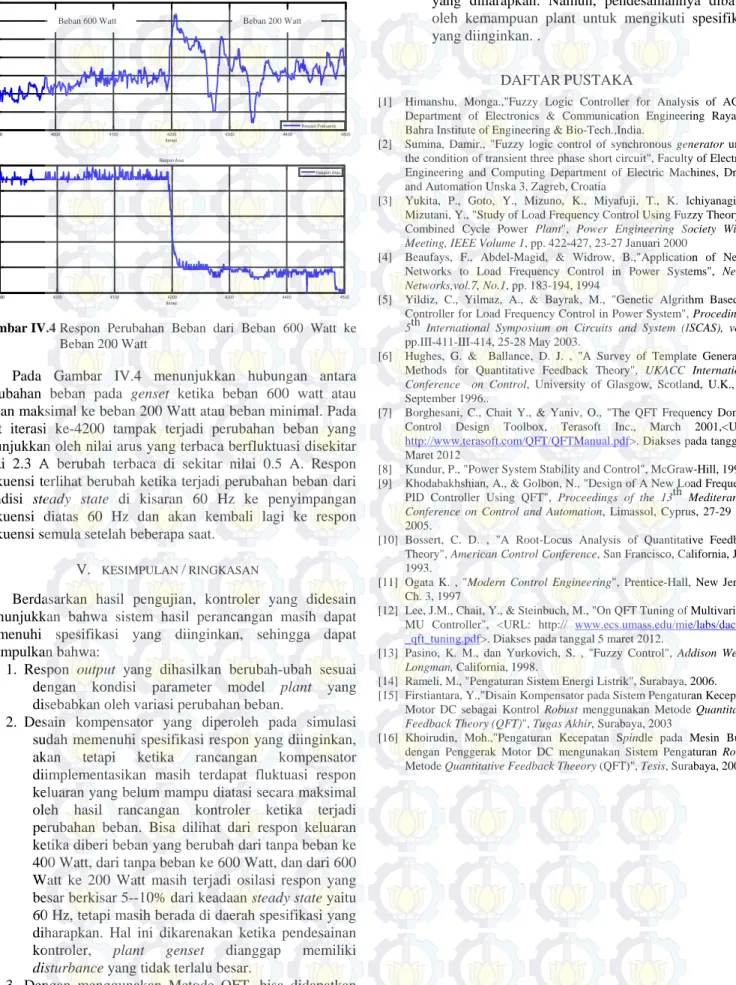
Gambar IV.4 Respon Perubahan Beban dari Beban 600 Watt ke
Beban 200 Watt
Pada Gambar IV.4 menunjukkan hubungan antara perubahan beban pada genset ketika beban 600 watt atau beban maksimal ke beban 200 Watt atau beban minimal. Pada saat iterasi ke-4200 tampak terjadi perubahan beban yang ditunjukkan oleh nilai arus yang terbaca berfluktuasi disekitar nilai 2.3 A berubah terbaca di sekitar nilai 0.5 A. Respon frekuensi terlihat berubah ketika terjadi perubahan beban dari kondisi steady state di kisaran 60 Hz ke penyimpangan frekuensi diatas 60 Hz dan akan kembali lagi ke respon frekuensi semula setelah beberapa saat.
V. KESIMPULAN / RINGKASAN
Berdasarkan hasil pengujian, kontroler yang didesain menunjukkan bahwa sistem hasil perancangan masih dapat memenuhi spesifikasi yang diinginkan, sehingga dapat disimpulkan bahwa:
1. Respon output yang dihasilkan berubah-ubah sesuai dengan kondisi parameter model plant yang disebabkan oleh variasi perubahan beban.
2. Desain kompensator yang diperoleh pada simulasi sudah memenuhi spesifikasi respon yang diinginkan, akan tetapi ketika rancangan kompensator diimplementasikan masih terdapat fluktuasi respon keluaran yang belum mampu diatasi secara maksimal oleh hasil rancangan kontroler ketika terjadi perubahan beban. Bisa dilihat dari respon keluaran ketika diberi beban yang berubah dari tanpa beban ke 400 Watt, dari tanpa beban ke 600 Watt, dan dari 600 Watt ke 200 Watt masih terjadi osilasi respon yang besar berkisar 5--10% dari keadaan steady state yaitu 60 Hz, tetapi masih berada di daerah spesifikasi yang diharapkan. Hal ini dikarenakan ketika pendesainan kontroler, plant genset dianggap memiliki disturbance yang tidak terlalu besar.
3. Dengan menggunakan Metode QFT, bisa didapatkan rancangan kontroler yang sesuai dengan spesifikasi
yang diharapkan. Namun, pendesainannya dibatasi oleh kemampuan plant untuk mengikuti spesifikasi yang diinginkan. .
DAFTARPUSTAKA
[1] Himanshu, Monga.,"Fuzzy Logic Controller for Analysis of AGC", Department of Electronics & Communication Engineering Rayat & Bahra Institute of Engineering & Bio-Tech.,India.
[2] Sumina, Damir., "Fuzzy logic control of synchronous generator under the condition of transient three phase short circuit", Faculty of Electrical Engineering and Computing Department of Electric Machines, Drives and Automation Unska 3, Zagreb, Croatia
[3] Yukita, P., Goto, Y., Mizuno, K., Miyafuji, T., K. Ichiyanagi, & Mizutani, Y., "Study of Load Frequency Control Using Fuzzy Theory by Combined Cycle Power Plant", Power Engineering Society Winter
Meeting, IEEE Volume 1, pp. 422-427, 23-27 Januari 2000
[4] Beaufays, F., Abdel-Magid, & Widrow, B.,"Application of Neural Networks to Load Frequency Control in Power Systems", Neural
Networks,vol.7, No.1, pp. 183-194, 1994
[5] Yildiz, C., Yilmaz, A., & Bayrak, M., "Genetic Algrithm Based PI Controller for Load Frequency Control in Power System", Proceding of
5th International Symposium on Circuits and System (ISCAS), vol.3,
pp.III-411-III-414, 25-28 May 2003.
[6] Hughes, G. & Ballance, D. J. , "A Survey of Template Generation Methods for Quantitative Feedback Theory", UKACC International
Conference on Control, University of Glasgow, Scotland, U.K., 2-5
September 1996..
[7] Borghesani, C., Chait Y., & Yaniv, O., "The QFT Frequency Domain Control Design Toolbox, Terasoft Inc., March 2001,<URL:
http://www.terasoft.com/QFT/QFTManual.pdf>. Diakses pada tanggal 5 Maret 2012
[8] Kundur, P., "Power System Stability and Control", McGraw-Hill, 1994. [9] Khodabakhshian, A., & Golbon, N., "Design of A New Load Frequency
PID Controller Using QFT", Proceedings of the 13th Mediteranean
Conference on Control and Automation, Limassol, Cyprus, 27-29 Juni
2005.
[10] Bossert, C. D. , "A Root-Locus Analysis of Quantitative Feedback Theory", American Control Conference, San Francisco, California, Juni, 1993.
[11] Ogata K. , "Modern Control Engineering", Prentice-Hall, New Jersey, Ch. 3, 1997
[12] Lee, J.M., Chait, Y., & Steinbuch, M., "On QFT Tuning of Multivariable
MU Controller", <URL: http:// www.ecs.umass.edu/mie/labs/dacs/on
_qft_tuning.pdf>. Diakses pada tanggal 5 maret 2012.
[13] Pasino, K. M., dan Yurkovich, S. , "Fuzzy Control", Addison Wesley
Longman, California, 1998.
[14] Rameli, M., "Pengaturan Sistem Energi Listrik", Surabaya, 2006. [15] Firstiantara, Y.,"Disain Kompensator pada Sistem Pengaturan Kecepatan
Motor DC sebagai Kontrol Robust menggunakan Metode Quantitative
Feedback Theory (QFT)", Tugas Akhir, Surabaya, 2003
[16] Khoirudin, Moh.,"Pengaturan Kecepatan Spindle pada Mesin Bubut dengan Penggerak Motor DC mengunakan Sistem Pengaturan Robust Metode Quantitative Feedback Theeory (QFT)", Tesis, Surabaya, 2006.