PERENCANAAN KONTROL PID PADA MOTOR INDUKSI
BERBASIS MATLAB SIMULINK
Andi Kurniawan N1, Hery Hariyanto2 1
Jurusan Teknik Elektro, Fakultas Teknik, Universitas Semarang Jl. Sukarno-Hatta, Tlogosari, Semarang, Indonesia
Email: andikn76@gmail.com 2
Jurusan Teknik Elektro, Fakultas Teknik, Universitas Semarang Jl. Sukarno-Hatta, Tlogosari, Semarang, Indonesia
Abstract
Motor induction’s speed tends to decrease if load given to them. Therefore we need a controller that could maintenance the speed. Furthermore, the controller is also used to handle the speed changes when the load is removed or loaded.
The speed controller is guarded with adjust the frequency proportional voltage input, integral and derivative. As a result is good and reliable controller for those methods and reduce the drawback. The PID controller is suitable for a motor with inconsistent load that sudden load changes.
Keywords: Controller Proportional Integral Derivative (PID), induction motor speed, load
Abstrak
Kecepatan motor induksi cenderung turun jika diberi beban sehingga diperlukan suatu pengendali untuk mempertahankan kecepatan yang diinginkan. Pengendali juga diperlukan untuk mengatasi perubahan kecepatan saat beban dilepas atau diberikan.
Pengaturan kecepatan diatur dengan mengatur frekuensi tegangan masukan proporsional, integral, dan derivatif menghasilkan pengendali yang bagus dan handal karena ketiga mode tersebut dapat saling melengkapi kekurangan masing-masing. Pengendali PID cocok untuk mengatasi perubahan beban yang mendadak.
Kata Kunci: Pengendali Proposional Integral Derivatif (PID), kecepatan motor induksi, beban
1. PENDAHULUAN
Motor AC lebih banyak digunakan dari pada motor DC karena arus AC dapat dibangkitkan dan didistribusikan dengan biaya yang lebih murah dari pada arus DC. Selain itu, motor AC memiliki keunggulan dalam hal biaya, ukuran, berat, dan membutuhkan lebih sedikit perawatan dibanding motor DC.
Motor induksi sangkar tupai adalah jenis motor AC yang paling banyak digunakan dalam industri. Motor ini dapat dioperasikan di tempat di mana banyak terdapat gas dan debu atau pada kondisi yang sangat lembab dan akan beroperasi dengan sangat baik dengan sedikit perhatian. Motor ini tidak memiliki sikat dan komutator, dan konstruksinya kuat, sehingga mampu menahan lonjakan arus yang besar, dan mudah untuk perbaikan dan perawatan.
Kecepatan sinkron motor induksi (ns) dirumuskan dengan ns = 120 f/p sehingga pengaturan kecepatan dapat dilakukan dengan mengatur frekuensi tegangan masukan (f) atau dengan mengubah jumlah kutub (p). Pengaturan kecepatan dengan mengubah jumlah kutub dilakukan dengan merancang lilitan stator sedemikian rupa sehingga dengan pengubahan sederhana pada hubungan kumparan, jumlah kutub dapat diubah dengan perbandingan 2:1. Cara ini tidak praktis dan hanya dapat menghasilkan variasi kecepatan yang sedikit. Sedangkan pengaturan kecepatan dengan pengaturan frekuensi, dilakukan dengan inverter, dapat menghasilkan perubahan kecepatan yang diskret maupun kontinyu dengan rentang pengaturan yang lebar, perubahan kecepatan yang halus, dan tanggapan pengaturan yang cepat.
Techno Science Vol.6 No.1 Mei 2012
732
732
Dahulu motor DC lebih disukai untuk dioperasikan pada kecepatan yang bervariasi karena pengendaliannya mudah dan tanggapannya cepat. Namun setelahdikembangkannya inverter penggunaan motor AC untuk kecepatan yang bervariasi pun menjadi populer. Beberapa aplikasi yang penting dari pengendalian kecepatan motor induksi adalah pada pengendalian kecepatan kipas angin, kompresor, pompa, dan blower.
Ketika motor induksi dioperasikan secara langsung dari tegangan jala-jala (pada frekuensi 50 Hz dan besar tegangan tetap), motor induksi berputar dengan kecepatan yang relatif konstan. Namun demikian, kecepatan motor dipengaruhi oleh beban. Saat beban motor bertambah maka kecepatannya akan turun, dan sebaliknya. Jika motor ingin dioperasikan pada kecepatan konstan saat bebannya berubah, diperlukan suatu pengendali untuk mengatur frekuensi tegangan masukan. Permasalahannya bagaimana pengendali PID dapat diatur agar kecepatan motor mencapai set point dengan cepat dan stabil.
2. METODE PENELITIAN
2.1 PERANGKAT KERAS (HARDWARE)
Pada analisa pemodelan simulasi kendali PID tersebut menggunakan komputer dengan spesifikasi sebagai berikut :
1. Intel pentium 3 2. CPU 1.8 GHz 3. RAM 248 MB
2.2 PERANGKAT LUNAK (SOFTWARE)
Perancangan perangkat lunak pada analisa pemodelan simlasi kendali proporsianal
integral derivatif ini meliputi program microsoft windows XP profesional versi 2002, sedangkan sofware pendukung dengan menggunakan bahasa pemrograman matlab dengan menggunakan simulink yang disimpan di dalam komputer.
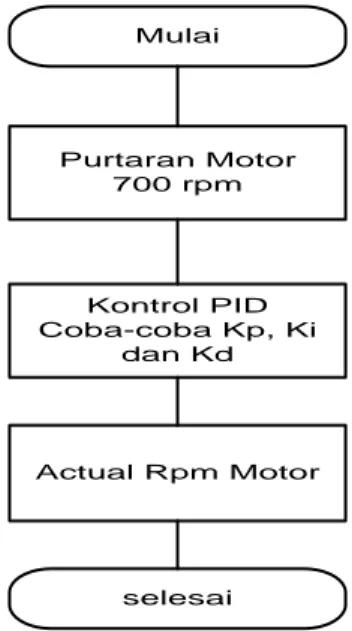
2.3 Diagram Alir kontrol PID pada Motor 3 fase
Untuk mengatur kecepatan putaran motor, digunakan kendali PID controller dan diagram alirnya dapat dilihat pada Gambar 3.
Mulai Kontrol PID Coba-coba Kp, Ki dan Kd Actual Rpm Motor selesai Purtaran Motor 700 rpm
Gambar 3 Diagram alir kendali PID motor 3 fase
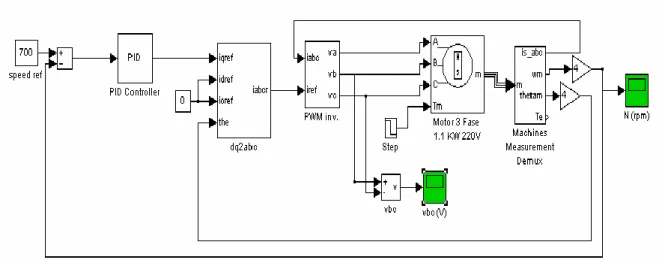
2.4 Kendali PID Motor 3 Fase
Kendali PID yang dirancang adalah sebagai berikut, yang terdiri dari block parameter
Gambar. 4 Simulink control PID pada motor 3 fase
3. HASIL DAN PEMBAHASAN
Simulasi dilakukan untuk mengetahui kinerja sistem PID dengan parameter PID yang ditentukan yaitu dengan mengubah nilai-nilai Kp, Ki dan Kd. Dengan perubahan konstanta
proporsional, integral dan derivative kita dapat menganalisa putaran motor yang dihasilkan.
3.1 Simulasi Dengan Perubahan Konstanta Proporsional 3.1.1 Konstanta proporsional 0
Pada simulasi dengan menggunakan konstanta proporsional sebesar 0, konstanta integral sebesar 2.5 dan konstanta derivative sebesar 0.1. Dalam simulasi tersebut dapat kita lihat hasilnya pada grafik tersebut dibawah :
Gambar 5 Grafik putaran motor dengan menggunakan Kp 0, Ki 2.5 dan Kd 0.1 3.1.2 Konstanta proporsional 2.5
Simulasi dengan menggunakan konstanta proporsional sebesar 2.5, konstanta integral sebesar 2.5 dan konstanta derivative sebesar 0.1. dalam simulasi tersebut dapat kita lihat hasilnya pada grafik tersebut dibawah :
Techno Science Vol.6 No.1 Mei 2012
734
734
Gambar. 6 Grafik putaran motor dengan menggunakan Kp 2.5, Ki 2,5 dan Kd 0,1Pada gambar 6 mencoba dengan konstanta proporsional sebesar 2.5 didapat hasil pada grafik menunjukkan respon yang kurang cepat untuk mencapai putaran 700 rpm. Respon tersebut diimbangi dengan putaran yang stabil.
3.1.3 Konstanta proporsional 4.5
Simulasi dengan menggunakan konstanta proporsional sebesar 4.5, konstanta integral sebesar 2.5 dan konstanta derivative sebesar 0.1. dalam simulasi tersebut dapat dilihat hasilnya pada grafik tersebut dibawah :
Gambar 7 Grafik putaran motor dengan menggunakan Kp 4.5, Ki 2,5 dan Kd 0,1
Pada gambar.7 mencoba dengan konstanta proporsional sebesar 4.5 didapat hasil pada grafik menunjukkan respon yang kurang cepat untuk mencapai putaran 700 rpm. Respon tersebut diimbangi dengan putaran yang stabil pada putaran motor.
3.2 Simulasi Dengan Perubahan Konstanta Integral 3.2.1 Konstanta Integral 0
Pada simulasi perubahan nilai konstanta integral kita mencoba dengan konstanta
proporsional sebesar 1, sedangkan nilai konstanta integral kita lakukan trial and error
menggunakan nilai konstanta dimulai dari 0 sampai dengan 5 dan konstanta derivative sebesar 0.1. Simulasi tersebut dapat kita lihat pada grafik dibawah ini :
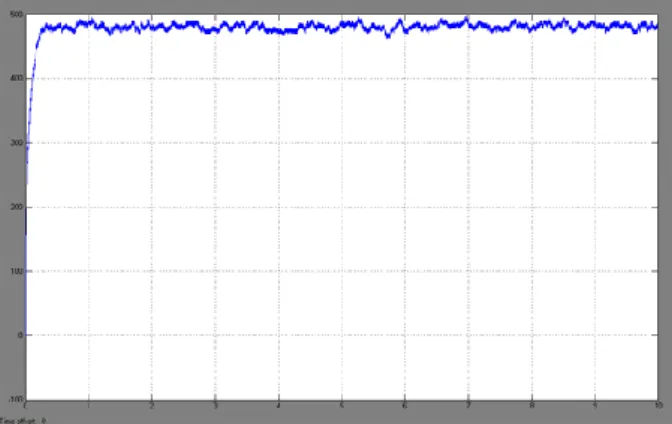
Gambar 8. Grafik putaran motor dengan menggunakan Kp.1, Ki 0 dan Kd 0,1
Pada gambar.8 mencoba dengan konstanta integral sebesar 0 didapat hasil pada grafik menunjukkan respon yang tidak baik, putaran out put mendekati 500 rpm. Respon tersebut diimbangi dengan putaran yang kurang stabil pada putaran motor.
3.2.2 Konstanta Integral 2.5
Simulasi dengan menggunakan konstanta proporsional sebesar 1, konstanta integral sebesar 2.5 dan konstanta derivative sebesar 0.1. dalam simulasi tersebut dapat kita lihat hasilnya pada grafik tersebut dibawah :
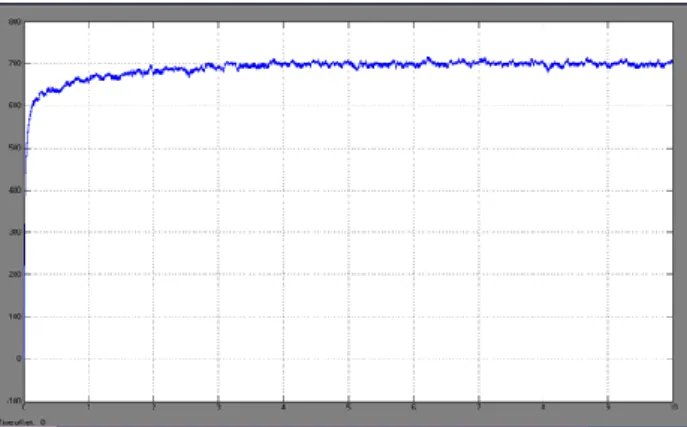
Gambar 9 Grafik putaran motor dengan menggunakan Kp.1, Ki 2.5 dan Kd 0,1
Pada gambar. 9 mencoba dengan konstanta integral sebesar 2.5 didapat hasil pada grafik menunjukkan respon yang baik, putaran out put cepat medekati putaran sebesar 700 rpm. Respon tersebut diimbangi dengan putaran yang kurang stabil.
3.2.3 Konstanta Integral 5
Simulasi dengan menggunakan konstanta proporsional sebesar 1, konstanta integral sebesar 5 dan konstanta derivative sebesar 0.1. dalam simulasi tersebut dapat kita lihat hasilnya pada grafik tersebut dibawah :
Techno Science Vol.6 No.1 Mei 2012
736
736
Pada gambar.10 mencoba dengan konstanta integral sebesar 5. didapat hasil pada grafik menunjukkan respon yang baik, putaran out put sangat cepat medekati putaran sebesar 700 rpm. Respon tersebut diimbangi dengan putaran yang kurang stabil.3.3 Simulasi Dengan Perubahan Konstanta Derivatif
Pada simulasi dengan perubahan nilai konstanta derivative mencoba dengan konstanta proporsional sebesar 1, sedangkan nilai konstanta integral sebesar 2.5 sedangkan konstanta derivative dilakukan trial and error dengan range 0 sampai dengan 0.3.
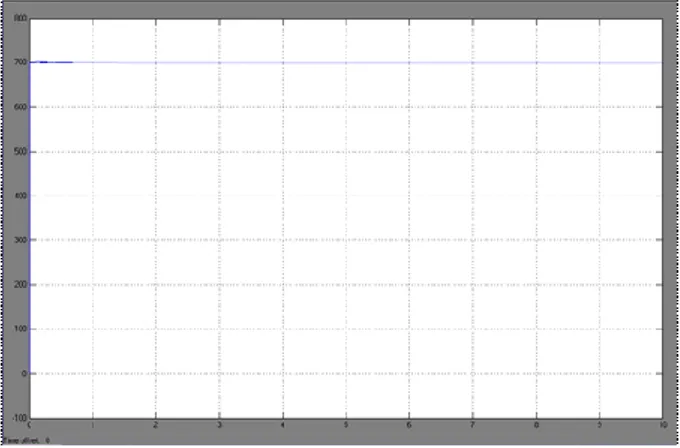
3.3.1 Konstanta Derivatif 0
Pada simulasi ini dicoba dengan menggunakan konstanta derivative sebesar 0, Simulasi tersebut dapat kita lihat hasilnya pada grafik dibawah ini :
Gambar.11 Grafik putaran motor dengan menggunakan Kp.1, Ki 2.5 dan Kd 0
Pada gambar.11 mencoba dengan konstanta derivatifl sebesar 0. didapat hasil pada grafik menunjukkan respon yang sangat baik, putaran out put sangat cepat mencapai putaran yang diinginkan sebesar 700 rpm. Respon tersebut diimbangi dengan putaran yang sangat stabil.
3.3.2 Konstanta Derivatif 0.1
Simulasi dengan menggunakan konstanta proporsional sebesar 1, konstanta integral sebesar 5 dan konstanta derivative sebesar 0.1. dalam simulasi tersebut dapat kita lihat hasilnya pada grafik tersebut dibawah :
Gambar .12 Grafik putaran motor dengan menggunakan Kp.1, Ki 2.5 dan Kd 0.1
Pada gambar.12 mencoba dengan konstanta derivatifl sebesar 0.1 didapat hasil pada grafik menunjukkan respon yang baik, putaran out put yang naik dengan perlahan mencapai putaran yang diinginkan sebesar 700 rpm. Respon tersebut diimbangi dengan putaran yang stabil.
3.3.3 Konstanta Derivatif 0.2
Simulasi dengan menggunakan konstanta proporsional sebesar 1, konstanta integral sebesar 5 dan konstanta derivative sebesar 0.2. dalam simulasi tersebut dapat kita lihat hasilnya pada grafik tersebut dibawah :
Gambar.13 Grafik putaran motor dengan menggunakan Kp.1, Ki 2.5 dan Kd 0.2
Pada gambar.13 mencoba dengan konstanta derivatifl sebesar 0.2 didapat hasil pada grafik menunjukkan respon yang baik, putaran out put yang naik dengan perlahan mencapai putaran yang diinginkan sebesar 700 rpm. Respon kurang bagus kerena responnya lambat. 3.3.4 Konstanta Derivatif 0.3
Simulasi dengan menggunakan konstanta proporsional sebesar 1, konstanta integral sebesar 5 dan konstanta derivative sebesar 0.3. dalam simulasi tersebut dapat kita lihat hasilnya pada grafik tersebut dibawah :
Gambar.14 Grafik putaran motor dengan menggunakan Kp.1, Ki 2.5 dan Kd 0.3
Pada gambar.14 mencoba dengan konstanta derivatifl sebesar 0.3 didapat hasil pada grafik menunjukkan respon yang baik, putaran out put yang naik dengan perlahan mencapai putaran yang diinginkan sebesar 700 rpm. Respon sangat lambat dibandingkan dengan memakai konstanta derivative sebesar 0.2.
4. KESIMPULAN
Berdasarkan hasil simulasi dan analisa yang dilakukan didapatkan hal-hal penting sebagai berikut:
a. Pada simulasi dengan melakukan pengubahan konstanta proporsional dimulai dari 0 sampai dengan 5, pengubahan tersebut dengan interval 0.5. Sedangkan konstanta
integral sebesar 2.5 dan konstanta derivatif sebesar 0.1 diperoleh grafik yang hampir
sama tidak terjadi perubahan yang sangat significant. Hasil simulasi tersebut menunjukkan kenaikan putaran motor yang baik tetapi tidak terjadi putaran yang
Techno Science Vol.6 No.1 Mei 2012
738
738
b. Pada simulasi dengan melakukan pengubahan konstanta integral dimulai dari 0 sampai dengan 5, pengubahan tersebut dengan interval 0.5. Sedangkan konstantaproporsional sebesar 1 dan konstanta derivatif sebesar 0.1 diperoleh grafik putaran
yang tidak baik karena untuk mencapai putaran yang diinginkan sangat lama dan setelah mencapai putaran yang diinginkan putarannya berubah-ubah. Dengan melakukan pengubahan nilai konstanta integral hasilnya lebih buruk dibandingan dengan melakukan pengubahan konstanta proporsional.
c. Pada simulasi dengan melakukan pengubahan konstanta derivatif dimulai dari 0 sampai dengan 0.3, pengubahan tersebut dengan interval 0.1. Sedangkan konstanta
proporsional sebesar 1 dan konstanta integral sebesar 2.5 diperoleh grafik putaran
yang sangat baik pada saat konstanta derivatifnya sama dengan 0, yaitu putaran dapat mencapai putaran yang diinginkan sangat cepat dan setelah mencapai putaran yang dinginkan yaitu sebesar 700 rpm putaran motor tersebut tetap konstan.
d. Pada simulasi kendali putaran dengan menggunakan kontrol proporsional, integral dan
derivatif tersebut sebenarnya cukup menggunakan kontrol proporsional integral saja
pada saat dilakukan pengubahan nilai konstanta derivatif pada hasil simulasi menunjukkan respon yang tidak bagus.
DAFTAR PUSTAKA
[1] Bambang Sarjono , Haris Santosa , Mesin Listrik II (Mesin AC), Politeknik Negeri Semarang.
[2] Dwi Haryanto, Thomas wahyu, Analisis dan Desain system Kontrol dengan Matlab, Andi , Yogyakarta, 2001
[3] Fitzgerald., Mesin-Mesin Listrik, Erlangga , Jakarta, 1990.
[4] Soelaiman TS, Mabuchi Magarisawa , Mesin Tak Serempak Dalam Praktek, PT. Pradnya Paramitha 1984