Alat Pengiris Jagung Dengan Kontrol P
Nanda Hardani1, Yulian Zetta Maulana2 dan Putri Madhona3 1,2,3
Teknik Elektronika, Politeknik Caltex Riau Jl. Umban Sari No.1 Rumbai Email: [email protected]
Abstrak
Alat pengiris jagung ini dirancang untuk membantu ibu rumah tangga dalam mengiris jagung untuk memenuhi kebutuhan sehari-hari. Dalam perancangan alat pengiris ini digunakan mikrokontroller ATMega 8535 yang berperan sebagai komponen kendali utama P(Proportional) sekaligus pengendali keseluruhan sistem. Pada alat ini terdapat 3 buah saklar selektor, dimana saklar selektor 1 untuk kecepatan rendah, saklar selektor 2 untuk kecepatan sedang, dan saklar selektor 3 untuk kecepatan tinggi. Pengendali P digunakan sebagai pengontrol kecepatan motor pengiris jagung untuk mempertahankan kecepatan yang tetap sesuai set point yang telah diberikan pada setiap saklar. Input sistem kendali P adalah sensor encoder yang menunjukkan nilai kecepatan putar motor pengiris. Sistem kerja alat ini yaitu membedakan nilai set point pada setiap saklar dan membuat nilai kecepatan mendekati set point dengan melakukan tuning parameter P yang tepat, dan nilai dari kecepatan motor tersebut akan ditampilkan ke LCD(Liquid Crystal Display. Hasil irisan jagung bagus dan tidak hancur, begitu juga dengan tongkol jagungnya. Pada sistem ini digunakan parameter Kp=0.3. Dan dari sistem ini di peroleh rise time sebesar 0.6s dan settling time sebesar 1.2s untuk set point 1, untuk set point 2 rise time sebesar 0.9s dan settling time sebesar 3.9s dan untuk set point 3 rise time sebesar 2.4s dan settling time sebesar 3s. Jadi dapat disimpulkan bahwa hasilnya bagus, tidak hancur, serta alat ini bisa berfungsi dengan baik.
Kata kunci : Alat Pengiris Jagung, P controller, Mikrokontroller ATMEGA 8535, sensor encoder. Abstract
The corn slicer tool was designed to help housewives. In this final project ATMega 8535 act as the P(Proportional) controller. There are 3 switches. The first for low speed, the second for medium speed, and the last for high speed. The P controller is used to keep the speed of the corn slicer motor in the condition same with set point that is given by selector switch. The input for the P controller is an encoder sensor that record the speed of the corn slicer. This system is used to differentiate input from selector switch and keep the speed of the corn slicer based on set point value by tuning the P parameter. Then the motor speed of the corn slicer is displayed on LCD(Liquid Crystal Display). The result of slicer is in a good condition as well as the corn’s cob. In this system, the Kp parameter’s value is 0.3. From the first mode, the rise time is 0.6s and the settling time is 1.2s for set point that is given from selector switch. The second mode, the rise time is 0.9s and the settling time is 3.9s and for the last mode, the rise time is 2.4s and the settling time is 3s. So we can conclude that the result is good, not destroyed, and this tool can function properly.
Keywords: The corn slicer, P controller, microcontroller ATMega 8535, encoder sensor. 1 Pendahuluan
Di Indonesia, jagung merupakan salah satu makanan pangan terpenting kedua setelah padi yang telah dikonsumsi oleh sebagian besar masyarakat. Berdasarkan urutan bahan makanan pokok di dunia, jagung menduduki urutan ke 3 setelah gandum dan padi (Aditya Chandra dan Wardiyanto,2011). Selain sebagai bahan makan pokok masyarakat, jagung juga dapat diolah menjadi makanan kecil, dan lain-lain.
Pengirisan jagung pada industri rumah tangga dan industri kecil sebagian besar dilakukan dengan tenaga manusia (manual) sehingga memerlukan proses yang lama dalam mengiris jagung tersebut. Pada proyek akhir ini penulis akan merancang sebuah alat tepat guna yaitu alat pengiris jagung yang mampu membantu masyarakat, khususnya ibu-ibu rumah tangga untuk menghemat waktu saat mengiris jagung.
Pada penelitian ini digunakan 3 buah saklar selektor, dimana saklar selektor 1 untuk kecepatan rendah, saklar selektor 2 untuk kecepatan sedang, dan saklar selektor 3 untuk kecepatan tinggi. Sedangkan untuk pengendali P nya sendiri digunakan sebagai pengontrol kecepatan motor pengiris untuk menjaga kecepatan agar tetap sesuai dengan set point ketika diberi beban. Agar kecepatan motor yang diinginkan tercapai maka nilai Kp harus diatur. Input sistem kendali P adalah sensor encoder yang menunjukkan nilai kecepatan putar motor pengiris. Parameter pengendalian P pada pengujian ini dilakukan dengan menggunakan metode trial and
error. Sistem kerja alat ini yaitu membedakan nilai set point pada setiap saklar dan membuat
nilai kecepatan sesuai dengan set point dengan melakukan tuning parameter P yang tepat, dan nilai dari kecepatan motor tersebut akan ditampilkan ke LCD(Liquid Crystal Display).
2 Dasar Teori
2.1 Sistem Kontrol PID
Pengendali PID merupakan pengendali yang terdiri atas pengendali Proporsional, Integral dan Turunan (Derivative). Dalam pengaplikasian, masing masing pengendali dapat berdiri sendiri atau dapat melakukan pengkombinasian. Dalam perancangan sistem kontrol PID yang perlu dilakukan adalah mengatur parameter P, I atau D agar tanggapan sinyal keluaran sistem terhadap masukan tertentu sebagaimana yang diinginkan. (Raden,2011). Dalam waktu kontinyu, sinyal keluaran pengendali PID dapat dirumuskan sebagai berikut.
(1)
dimana:
u(t) = sinyal keluaran pengendali PID Kp = konstanta proporsional
Ki = konstanta integral Kd = konstanta turunan
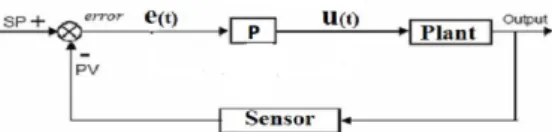
e(t) = sinyal kesalahan = referensi - output 2.1.1 Kontrol Proporsional
Kontrol proporsional adalah jenis kontrol yang digunakan untuk memperbaiki respon transien khususnya rise time dan settling time.
Berikut persamaan dari kontrol proporsional :
Gambar 1 Sistem kendali loop tertutup
(2) dimana, U(t) = nilai yang dihasilkan
Kp = konstanta proporsional e(t) = error
2.2 PWM(Pulse Width Modulation)
PWM merupakan sebuah mekanisma untuk membangkitkan sinyal keluaran yang periodenya berulang antara high dan low dimana kita dapat mengontrol durasi sinyal high dan low sesuai dengan yang kita inginkan. Duty cycle merupakan prosentase periode sinyal high dan periode sinyal, prosentase duty cycle akan bebanding lurus dengan tegangan rata-rata yang dihasilkan. Berikut ilustrasi sinyal PWM, misalkan kondisi high 5 V dan kondisi low 0 V. Pengaturan lebar pulsa modulasi atau PWM merupakan salah satu teknik yang “ampuh” yang digunakan dalam sistem kendali (control system) saat ini. Pengaturan lebar modulasi dipergunakan di berbagai bidang yang sangat luas, salah satu diantaranya adalah:speed control (kendali kecepatan), power control (kendali sistem tenaga), measurement and communication (pengukuran atau instrumentasi dantelekomunikasi).
2.2.1 Prinsip Dasar PWM
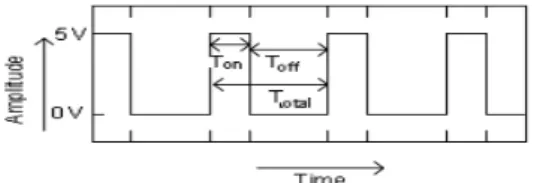
Modulasi lebar pulsa (PWM) dicapai/diperoleh dengan bantuan sebuah gelombang kotak yang mana siklus kerja (duty cycle) gelombang dapat diubah-ubah untuk mendapatkan sebuah tegangan keluaran yang bervariasi yang merupakan nilai ratarata dari gelombang tersebut.
Gambar 2 Bentuk gelombang kotak(pulsa) dengan kondisi high 5V dan low 0V
Ton adalah waktu dimana tegangan keluaran berada pada posisi tinggi (baca: high atau 1) dan, Toff adalah waktu dimana tegangan keluaran berada pada posisi rendah (baca:low atau 0). Misal Ttotal adalah waktu satu siklus atau penjumlahan antara Ton dengan Toff , biasa dikenal dengan istilah “periode satu gelombang”.
) (3)
Siklus kerja atau duty cycle sebuah gelombang di definisikan sebagai,
= (4)
Tegangan keluaran dapat bervariasi dengan duty-cycle dan dapat dirumuskan sebagai berikut,
Vout = (5)
sehingga :
\ (6)
Dari rumus diatas dapat ditarik kesimpulan bahwa tegangan keluaran dapat diubah ubah secara langsung dengan mengubah nilai Ton. Apabila Ton adalah 0, Vout juga akan 0. Apabila Ton adalah Ttotal maka Vout adalah Vin atau katakanlah nilai maksimumnya.
PWM bekerja sebagai switching power suplai untuk mengontrol on dan off. Tegangan dc dikonvert menjadi sinyal kotak bolak balik, saat on mendekati tegangan puncak dan saat off menjadi nol (0) volt. Dengan mengatur duty cycle dari sinyal (modulasi lebar pulsa dari sinyal disebabkan oleh PWM). Terlihat pada gambar di bawah sinyal ref adalah sinyal tegangan dc yang dikonversi oleh sinyal gergaji dan menghasilkan sinyal kotak.
Gambar 3 Sinyal Referensi ( sinyal tegangan DC)
Informasi analog dapat dikirimkan dengan menggunakan pulsa-pulsa tegangan atau pulsa-pulsa arus. Dengan modulasi pulsa, pembawa informasi terdiri dari pulsa pulsa persegi yang berulang-ulang. Salah satu teknik modulasi yang sering digunakan adalah teknik modulasi durasi atu lebar dari waktu tunda positif ataupun waktu tunda negatif pulsa-pulsa persegi tersebut. Untuk membangkitkan sinyal PWM adalah dengan menggunakan fungsi timer/counter yang dibandingkan nilainya dengan sebuah register tertentu.
2.3 Mikrokontroller ATMega 8535
Mikrokontroler ATMega 8535 adalah mikrokontroler berjenis Reduced Instruction Set
Computing (RISC) 8 bit dengan delapan kilobyte flash memori, high performance dan low power. Piranti ini dapat diprogram secara In-System Programming (ISP) dan dapat diprogram
berulang-ulang selama 10.000 kali baca/tulis (read/write) di dalam sistem.
Mikrokontroler sendiri digunakan jika proses yang dikontrol melibatkan operasi yang lebih kompleks baik itu aritmatika, logika, pewaktuan, atau lainnya yang akan sangat rumit bila diimplementasikan dengan komponen-komponen diskrit karena dilakukan secara software (Hari Sasongko, 2012).
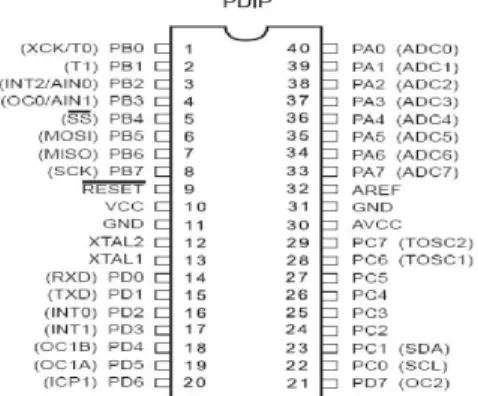
Gambar 4. Konfigurasi pin-pin ATMega 8535
Pin-pin pada ATMega 8535 memiliki beberapa fungsi, namun umumnya fungsi yang digunakan hanyalah fungsi sebagai Input dan Output. Beberapa konfigurasi pin ATMega 8535 dapat dijelaskan secara fungsional sebagai berikut:
1. VCC merupakan pin yang berfungsi sebagai pin masukan catu daya 2. GND merupakan pin ground
3. Port A (PA0..PA7) merupakan pin I/O dan pin masukan ADC
4. Port B (PB0..PB7) merupakan pin I/O dan pin fungsi khusus, yaitu Timer/Counter, komparator analog, dan SPI
5. Port C (PC0..PC7) merupakan pin I/O dan pin fungsi khusus, yaitu Two Wire Interface (TWI), komparator analog dan Timer Oscilator
6. Port D (PD0..PD7) merupakan pin I/O dan pin fungsi khusus, yaitu komparator analog, interupsi eksternal, dan komunikasi serial
7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler 8. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal
9. AVCC merupakan pin masukan tegangan untuk ADC 10. AREF merupakan pin masukan tegangan referensi ADC
2.4 Motor DC(Motor DC Planetary Gearhead with Encoder)
Motor DC berfungsi mengubah tenaga listrik menjadi tenaga mekanis dimana gerak tersebut berupa putaran dari motor. Prinsip dasar dari motor arus searah adalah kalau sebuah kawat berarus diletakkan antara kutub magnet (U-S), maka pada kawat itu akan bekerja suatu gaya yang menggerakan kawat itu. Arah gerakan kawat dapat ditentukan dengan mengguankan kaidah tangan kiri, yang berbunyi sebagai berikut : Apabila tangan kiri terbuka diletakkan diantara kutub U dan S, sehingga garis-garis gaya yang keluar dari kutub utara menembus telapak tangan kiri dan arus di dalam kawat mengalir searah dengan arah keempat jari, maka kawat itu akan mendapat gaya yang arahnya sesuai (Meri Wardana,2012).
Motor DC mempunyai dua bagian dasar yaitu : Bagian diam/tetap (stasioner) yang disebut stator. Stator ini menghasilkan medan magnet, baik yang dibangkitkan dari sebuah koil (elektromagnetik) atau magnet permanen. Bagian stator terdiri dari bodi motor yang memiliki magnet yang melekat padanya. Untuk motor kecil, magnet tersebut adalah magnet permanen sedangkan untuk motor besar menggunakan elektromagnetik. Kumparan yang dililitkan pada lempeng-lempeng magnet disebut kumparan medan. Bagian berputar (rotor).
Gambar 4 Motor DC Planetary Gearhead with Encoder 2.5 Optocoupler
Optocoupler adalah suatu piranti yang terdiri dari transmitter dan receiver, yaitu antara
bagian cahaya dengan bagian deteksi sumber cahaya terpisah. Biasanya optocoupler digunakan sebagai saklar elektrik, yang bekerja secara otomatis. Optocoupler sendiri terdiri dari 2 bagian, yaitu transmitter (pengirim) dan receiver (penerima).
Bagian transmitter merupakan bagian yang terhubung dengan rangkaian input atau rangkaian kontrol. Pada bagian ini terdapat sebuah LED infra merah (IR LED) yang berfungsi untuk mengirimkan sinyal kepada receiver.
Sedangkan receiver merupakan bagian yang terhubung dengan rangkaian output atau rangkaian beban, dan berisi komponen penerima cahaya yang dipancarkan oleh transmitter. Komponen penerima cahaya ini dapat berupa photodioda atau pun phototransistor. Pada bagian
receiver dibangun dengan dasar komponen phototransistor. Phototransistor merupakan suatu
transistor yang peka terhadap tenaga cahaya. Suatu sumber cahaya menghasilkan energi panas, begitu pula dengan spektrum infra merah. Karena spekrum infra mempunyai efek panas yang lebih besar dari cahaya tampak, maka phototransistor lebih peka untuk menangkap radiasi dari sinar inframerah.
Tujuan utama dari digunakan sensor cahaya dan piringan sensor adalah untuk mendapatkan data kecepatan putaran dari setiap roda. Piringan sensor yang digunakan dibuat dari negatif-film yang dijepit oleh dua buah acrylic transparan agar semakin presisi pembacaan datanya. Sedangkan sensor cahaya yang digunakan adalah optocoupler yang prinsip kerjanya adalah ketika ada benda yang berada di antara celah sensornya, maka cahaya yang dikirimkan tidak bisa diterima oleh bagian penerimanya, sehingga menghasilkan tegangan keluaran yang nilainya mendekati VCC, begitu juga sebaliknya, jika tidak ada benda diantara celah sensornya maka akan menghasilkan tegangan keluaran yang nilainya mendekati 0 Volt.
Gambar 5 Optocoupler 2.6 Rotary Encoder
Pada umumnya, rotary encoder digunakan sebagai sensor pengukur kecepatan pada sebuah motor. Berikut adalah gambar desain mekanik dari sebuah rotary encoder.
Gambar 6 Desain Umum Rotary Encoder
Prinsip kerja dari rangkaian optocoupler adalah, Jika antara phototransistor dan LED terhalang maka phototransistor tersebut akan off sehingga output dari kolektor akan berlogika high. Sebaliknya, jika antara phototransistor dan LED tidak terhalang maka phototransistor tersebut akan on sehingga output-nya akan berlogika low.
3 Perancangan Sistem
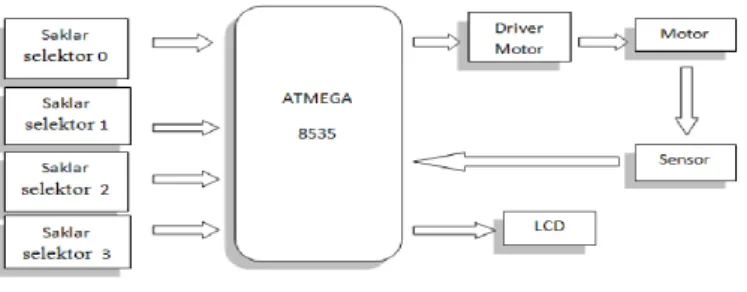
Gambar 7 Blok Diagram
Ketika saklar selektor 1 dipilih untuk kecepatan motor yang rendah, saklar selektor 2 untuk kecepatan sedang,dan saklar selektor 3 untuk kecepatan tinggi maka mikrokontroler akan mengolah data set point yang telah diberikan dengan kontrol P. Sedangkan saklar selektor 0 berfungsi untuk mematikan motor yang sedang menyala . Keluaran mikro berupa PWM yang akan diberikan ke driver motor, setelah itu motor akan berputar berdasarkan PWM yang diberikan. Kecepatan motor akan dibaca oleh optocoupler dan datanya akan dikirim ke mikro untuk diproses dengan kontrol P. Output dari mikro tersebut akan ditampilkan ke LCD.
4 Pengujian dan Analisa
4.1 Pengujian Kecepatan Motor dengan Sistem Open Loop dan Closed Loop
Pengujian Sensor bertujuan untuk mengetahui tingkat akurasi pengambilan data pada sensor optocopler, dimana data yang diambil dalam satuan RPM dan untuk pengaturan kecepatannya dengan mengatur duty cycle PWM(Pulse Width Modulation).
Pengujian dilakukan dengan cara membandingkan antara kecepatan motor DC tanpa beban dan dengan beban menggunakan kontrol P.
4.1.1 Pengujian Open Loop
Tabel 1 Hasil Pengujian Open Loop PWM Motor (%) Pengukuran Tanpa Beban (RPM) Pengukuran Dengan Beban (RPM)
23 285 Motor Tidak Berputar
39 435 405
59 480 465
78 495 450
100 510 480
Dari hasil pengujian dan analisa yang telah dilakukan didapatkan hasil pengukuran kecepatan motor, dimana motor dapat berputar saat PWM yang diberikan yaitu diatas 50 (Duty Cycle 20%). Pengukuran tanpa beban memiliki kecepatan yang lebih besar dibandingkan dengan beban. Pada saat PWM bernilai 60(Duty Cycle 23%), pengukuran kecepatan dengan beban tidak berhasil karena tekanan beban menyebabkan motor tidak mampu berputar.
Data pengukuran dengan beban merupakan data kecepatan motor pada saat awal beban dimasukkan. Pada saat PWM bernilai 100((Duty Cycle 39%), 150(Duty Cycle 59%), 200(Duty Cycle 78%) dan 255(Duty Cycle 100%) kecepatan motor perlahan menurun saat beban
diberikan. Data kecepatan motor ini diperoleh dari sensor rotary encoder yang di couple dengan as motor.
4.1.2 Pengujian Closed Loop
Pada saat pengujian closed loop, parameter P yang digunakan untuk membandingkan hasil yang diinginkan yaitu Kp=0.3, Kp=0.2 dan Kp=0.6. Set point ditentukan berdasarkan pengukuran kecepatan motor yang diinginkan. Pada pengujian ini, set point yang digunakan yaitu 420, 450 dan 480 RPM(Rotation Per Minute).
Tabel 2 Hasil Pengujian Closed Loop Set Point Rpm Kp Rise Time (Tr) Settling Time (Ts)
Error steady state (%) 1 420 0.6s 1.2s 0% 2 450 0.3 0.9s 3.9s 0% 3 480 2.4s 3s 0% 1 420 0.9s 8.4s 0% 2 450 0.2 3s 9.3s 0% 3 480 3.3s 5.1s 0% 1 420 0.9s - 3.6% 2 450 0.6 0,9s - 0% 3 480 7.2s 7.8s 0%
Dari hasil pengujian dan analisa yang telah dilakukan dapat dilihat nilai rise time dan settling time dari masing-masing set point untuk setiap nilai Kp yang berbeda. Pada saat Kp=0.3 nilai rise time dan settling time yang didapat untuk setiap set pointnya lebih baik dibandingkan Kp=0.2 dan Kp=0.6.
Rumus yang digunakan untuk mendapatkan nilai rise time dan settling time:
Keterangan: Tc = waktu pengambilan data dari sensor
Pada pengujian yang dilakukan, nilai Tc yang digunakan yaitu 0.3s. Untuk mendapatkan nilai settling time digunakan rumus yang sama dengan rise time. Sedangkan rumus yang digunakan untuk mendapatkan nilai error steady state:
(a)
(b)
(c)
Gambar 8 Respon saat set point1 (a) Kp=0.3; (b) Kp=0.2; (c) Kp=0.6
Dari Gambar 8 dapat dilihat respon dari masing-masing nilai Kp untuk set point 1 yaitu 420 Rpm. Dimana untuk Kp=0.3 didapatkan nilai rise time sebesar 0.6s, settling time sebesar 1.2s dan error steady state 0%, untuk Kp=0.2 nilai rise time sebesar 0.9s, settling time sebesar 8.4s dan error steady state 0% dan untuk Kp=0.6 nilai rise time sebesar 0.9s dan tidak memiliki settling time dengan error steady state sebesar 3.6%.
Respon Saat Set Point 2 = 450 Rpm
(a)
(b)
(c)
Gambar 9 Respon saat set point2 (a) Kp=0.3; (b) Kp=0.2; (c) Kp=0.6
Dari Gambar 9 dapat dilihat respon dari masing-masing nilai Kp untuk set point 2 yaitu 450 Rpm. Dimana untuk Kp=0.3 didapatkan nilai rise time sebesar 0.9s, settling time sebesar 3.9s dan error steady state 0%, untuk Kp=0.2 nilai rise time sebesar 3s, settling time sebesar 9.3s dan error steady state 0% dan untuk Kp=0.6 rise time sebesar 0.9s dan tidak memiliki settling time dengan error steady state sebesar 0%.
Respon Saat Set Point 3 = 480 Rpm
(a)
(b)
(c)
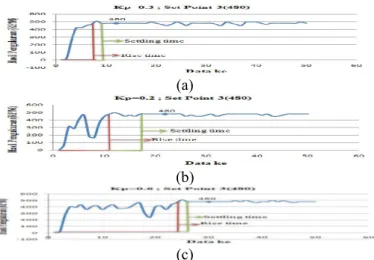
Gambar 10 Respon saat set point3 (a) Kp=0.3; (b) Kp=0.2; (c) Kp=0.6
Dari Gambar 10 dapat dilihat respon dari masing-masing nilai Kp untuk set point 3 yaitu 480 Rpm. Dimana untuk Kp=0.3 didapatkan nilai rise time sebesar 2.4s, settling time sebesar 3s dan error steady state 0%, untuk Kp=0.2 nilai rise time sebesar 3.3s, settling time sebesar 5.1s dan error steady state 0% dan untuk Kp=0.6 rise time sebesar 7.2s, settling time sebesar 7.8s dan error steady state 0%.
4.1.3 Pengujian Closed Loop Dengan Beban(Kp 0.3)
Set Point 1 = 420 Rpm; Set Point 2 = 450 Rpm; Set Point 3 = 480 Rpm
(a)
(b)
(c)
Gambar 11 Respon saat diberi beban (a) SP1; (b) SP2; (c) SP3
Dari Gambar 11 dapat dilihat respon dari masing-masing set point pada saat diberi beban jagung dengan nilai Kp=0.3. Pada saat kecepatan sudah mulai stabil, beban jagung
diberikan dan dapat dilihat kecepatan perlahan mulai menurun, lalu berusaha untuk naik kembali. Dimana untuk Set point 1 error steady state sebesar 0%, untuk set point 2 error steady state sebesar 0% dan untuk set point 3 error steady state sebesar 0%.
4.2 Pengujian Alat Pengiris Jagung
Alat pengiris terbuat dari steinlisstel yang berukuran 50.8 mili, karena diameter yang terlalu besar maka ujung pengiris jagungnya diperkecil sehingga membentuk lingkaran 30 mili sesuai ukuran tongkol jagung.
Gambar 12 Pisau Pengiris Jagung
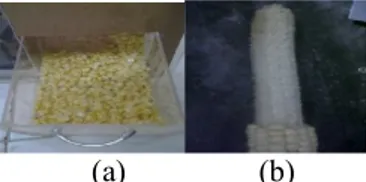
Alat pengiris jagung dapat bekerja dengan baik, hasil irisannya bagus dan tidak hancur, begitu juga dengan tongkol jagungnya seperti yang terlihat pada Gambar 13.
(a) (b)
Gambar 13 (a)Hasil Irisan Jagung; (b) Tongkol Jagung 5 Kesimpulan
Setelah melakukan pengujian dan analisa pada proyek akhir ini maka dapat disimpulkan bahwa:
1. PWM dapat bekerja dengan baik. Dimana PWM sudah dapat mengontrol kecepatan motor. Dan agar motor dapat berputar PWM nya harus bernilai diatas 50 PWM.
2. Pemberian nilai Kp yang tidak sesuai sangat berpengaruh pada keberhasilan sistem. Dengan menggunakan metode trial and error, diperoleh nilai parameter Kp=0.3.
3. Alat pengiris jagung harus dibuat sesuai dengan ukuran tongkol jagung agar semua ukuran jagung dapat di iris dan mendapatkan hasil irisan yang bagus.
6 Daftar Pustaka
[1] Sasongko, Bagus Hari, “Pemrograman Mikrokontroler dengan Bahasa C”, Penerbit Andi, 2012.
[2] Planetary Gearhead Motor 12V 13.7:1 with Encoder. Diambil 20 Agustus 2012 dari: http://www.robot-r-us.com/vmchk/motor-brushed/planetary-gearhead-motor-12v-13.71 with-encoder.html
[3] Teori Dasar LCD. (2012). Diambil 19 Agustus 2012 dari: www.scribd.com/doc/81901544/29/Teori-Dasar-LCD
[4] Chandra, Aditya dan Wardiyanto. Rancang Bangun Mesin Pemipil Jagung, Laporan Tugas Akhir, ITS, Surabaya, 2011