5
Pembawa Surat Kabar Di Lobby Kantor Berbasis AVR ATMega8535” ini antara lain secara garis besar yaitu IC Mikrokontroler ATMEGA8535, Sensor Proximity, dan Led. Berikut ini pembahasan dari komponen – komponen tersebut beserta fungsinya.
2.1 Sensor
Sensor adalah suatu peralatan yang berfungsi untuk mendeteksi gejala-gejala atau sinyal-sinyal yang berasal dari perubahan suatu energi seperti listrk, energi fisika, energi kima, energi biologi, energi mekanik dan sebaginya.
Suatu peralatan yang memberitahukan kepada sistem kontrol tentang apa yang sebenarnya terjadi dinamakan sensor atau juga di kenal tranduser.
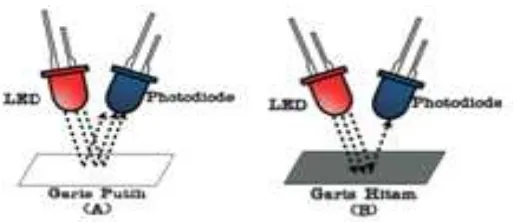
2.1.1 Sensor Proximity
Gambar 2.1 Prinsip Kerja Sensor Proximity
Sensor dari photodioda adalah jika semakin banyak cahaya yang diterima, maka nilai resistensinya semakin kesil. Dengan melakukan modifikasi maka besaran tersebut dapat diubah menjadi tegangan, sehingga jika sensor berada digaris hitam maka tegangan keluaran sensor akan kecil demikian pula sebaliknya.
2.2 Mikrokontroler ATMega 8535
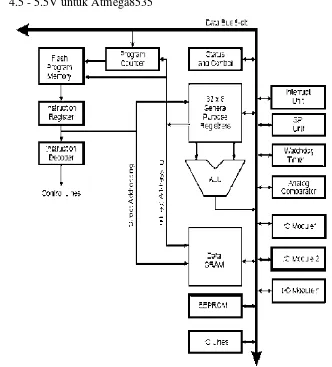
AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set Computer) yang ditingkatkan. Hampir semua instruksi dieksekusi dalam satu siklus clock. AVR mempunyai 32 register general-purpose, timer/counter fleksibel dengan mode compare, interrupt internal dan eksternal, serial UART, programmable Watchdog Timer, dan mode power saving. Mempunyai ADC dan PWM internal. AVR juga mempunyai In-System Programmable Flash on-chip yang mengijinkan memori program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI. ATmega8535 adalah mikrokontroler CMOS 8-bit daya-rendah berbasis arsitektur RISC yang ditingkatkan. Untuk lebih jelas tentang arsitektur dari ATmega8535 ditunjukan pada gambar.
ATMega8535 mempunyai throughput mendekati 1 MIPS per MHz membuat disainer sistem untuk mengoptimasi komsumsi daya versus kecepatan proses.
Beberapa keistimewaan dari AVR ATMega8535 antara lain :
1. Advanced RISC Architecture
32 x 8 General Purpose Fully Static Operation
Up to 16 MIPS Throughput at 16 MHz
On-chip 2-cycle Multiplier
2. Memori Data dan Memori Program
8K Bytes of In-System Self-Programmable Flash
Optional Boot Code Section with Independent Lock Bits
512 Bytes EEPROM
512 Bytes Internal SRAM
3. Peripheral Features
Two 8-bit Timer/Counters with Separate Prescalers and Compare Mode
Two 8-bit Timer/Counters with Separate Prescalers and Compare Modes
One 16-bit Timer/Counter with Separate Prescaler, Compare Mode, and
Capture Mode
Real Time Counter with Separate Oscillator
Four PWM Channels
8-channel, 10-bit ADC
Byte-oriented Two-wire Serial Interface
Programmable Serial USART 4. Special Microcontroller Features
Power-on Reset and Programmable Brown-out Detection
Internal Calibrated RC Oscillator
External and Internal Interrupt Sources
Six Sleep Modes: Idle, ADC Noise Reduction, Power-save, Power-down,
Standby and Extended Standby
5. I/O and Package
32 Programmable I/O Lines
40-pin PDIP, 44-lead TQFP, 44-lead PLCC, and 44-pad MLF
6. Operating Voltages
4.5 - 5.5V untuk Atmega8535
Gambar 2.2 Blok Diagram Arsitektur ATMega8535
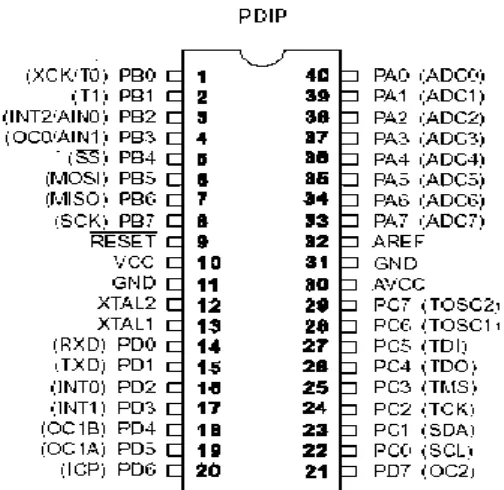
2.2.1 Konfigurasi Pin AVR ATMega 8535
Gambar 2.3 Pin-pin ATMega8535 kemasan 40-pin
Diskripsi dari pin-pin ATMega8535 adalah sebagai berikut : 1. VCC : masukan tegangan digital.
2. GND : Ground
3. Port A : Port A sebagai input analog ke A/D konverter. Port A juga sebagai 8-bit bi-directional port I/O, jika A/D konverter tidak digunakan. Pin-pin port dapat menyediakan resistor-resistor internal pull-up. Ketika port A digunakan sebagai input dan pull eksternal yang rendah akan menjadi sumber arus jika resistor-resistor pull-up diaktifkan. Pin-pin port A adalah tri-state ketika kondisi reset menjadi aktif sekalipun clock tidak aktif.
5. Port C : Port C adalah port I/O 8-bit bi-directional dengan resistor-resistor internal pull-up. Buffer output port C mempunyai karaketristik drive yang simetris dengan kemampuan keduanya sink dan source yang tinggi. Sebagai input, port C yang mempunyai pull eksternal yang rendah akan menjadi sumber arus jika resistor-resistor pull-up diaktifkan. Pin-pin port C adalah tri-state ketika kondisi reset menjadi aktif seklipun clock tidak aktif. Jika antarmuka JTAG enable, resistor-resistor pull-up pada pin-pin PC5(TDI), PC3(TMS), PC2(TCK) akan diktifkan sekalipun terjadi reset.
6. Port D : Port D adalah port I/O 8-bit bi-directional dengan resistor-resistor
internal pull-up. Buffer output port D mempunyai karaketristik drive yang simetris dengan kemampuan keduanya sink dan source yang tinggi. Sebagai input, port D yang mempunyai pull eksternal yang rendah akan menjadi sumber arus jika resistor-resistor pull-up diaktifkan. Pin-pin port D adalah tri-state ketika kondisi reset menjadi aktif seklipun clock tidak aktif.
7. Reset : Sebuah low level pulsa yang lebih lama daripada lebar pulsa minimum pada pin ini akan menghasilkan reset meskipun clock tidak berjalan.
8. XTAL1 : Input inverting penguat Oscilator dan input intenal clock operasi rangkaian.
9. XTAL2 : Output dari inverting penguat Oscilator.
10. AVCC : Pin supply tegangan untuk PortA dan A/D converter . Sebaiknya eksternalnya dihubungkan ke VCC meskipun ADC tidak digunakan. Jika ADC digunakan seharusnya dihubungkan ke VCC melalui low pass filter.
11. AREF : Pin referensi analog untuk A/D konverter.
2.2.2 Struktur Memori
Instruksi pada memori program dieksekusi dengan pipelining single level. Selagi sebuah instruksi sedang dikerjakan, instruksi berikutnya diambil dari memori program.
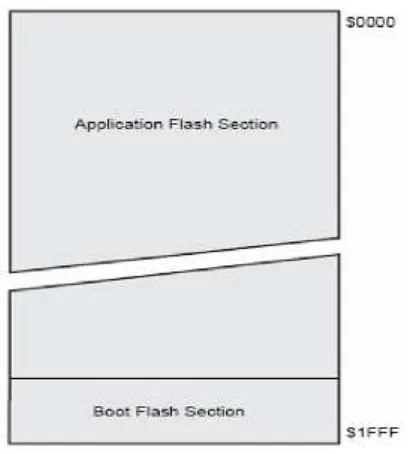
1. Flash Memori
ATMega8535 memiliki 16K byte flash memori dengan lebar 16 atau 32 bit. Kapasitas memori itu sendiri terbagi manjadi dua bagian yaitu bagian boot program dan bagian aplikasi program.
Gambar 2.4 Peta Memori Flash
Flash memori memiliki kemampuan mencapai 10.000 write dan erase.
2 .Memori SRAM
Penempatan memori data yang lebih rendah dari 1120 menunjukkan register, I/O memori, dan data internal SRAM. 96 alamat memori pertama untuk file register dan memori I/O, dan 1024 alamat memori berikutnya untuk data internal SRAM.
post-increament .Pada file register, mode indirect mulai dari register R26-R31. Pengalamatan mode direct mencapai keseuruhan kapasitas data. Pengalamatan mode indirect dis-placement mencapai 63 alamat memori dari register X atau Y. Ketika meggunakan mode pengalamatan indirect dengan pre-decrement dan post increment register X, Y, dan Z akan di-dicrement-kan atau di-increment-kan.
3. Memori EEPROM
Pada EEPROM ATmega8535 memiliki memori sebesar 512 byte dengan daya tahan 100.000 siklus write/read.
Register-register pada memori EEPROM : - Bit 15..9– Res:reserved bits
Bit ini sebagai bit-bit bank pada ATmega8 dan akan selalu membaca zero.
Gambar 2.5 Register alamat EEPROM Bit 15...8
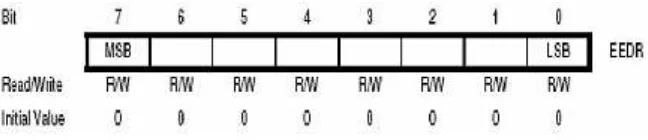
- Bit8..0– EEAR8..0:EEPROM address Bit-bit ini sebagai alamat EEPROM. - Bit 7..0– EEDR7..0:EEPROM data
Bit-bit ini sebagai data EEPROM.
Gambar 2.6 Register data EEPROM Bit Bit 7...0
Bit-bit ini terdapat pada register kontrol.
Bit ini sebagai Enable Interupt Ready pada EEPROM.
Gambar 2.7 Register kontrol EEPROM Bit Bit 7...0
- Bit 2
Bit ini sebagai Enable Interupt Master pada EEPROM. - Bit 1
Bit ini sebagai write enable pada EEPROM. - Bit 0
Bit ini sebagai read enable pada EEPROM.
2.2.3 Interupt
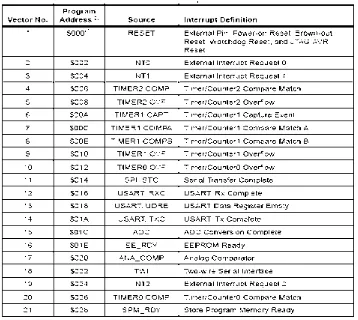
Interrupt merupakan suatu peristiwa yang menyebabkan mikrokontroller menghentikan program sejenak untuk mengerjakan proses interrupt tersebut. Setelah interrupt yang dikerjakan tersebut telah selesai maka mikrokontroller akan kembali ke rutin program yang telah dihentikan sejenak.
Tabel 2.1. Prioritas Interrupt
2.2.4 Port sebagai input/output digital
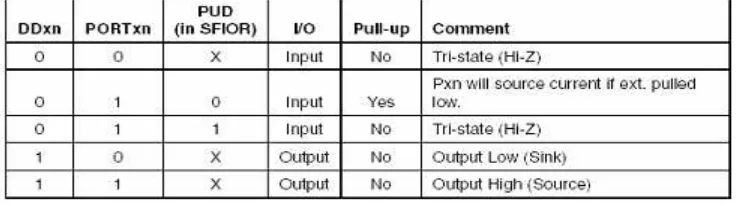
terkonfigurasi sebagai pin output maka pin port akan berlogika 1. Dan bila PORTxn diset 0 pada saat pin terkonfigurasi sebagai pin output maka pin port akan berlogika 0. Saat mengubah kondisi port dari kondisi tri-state (DDxn=0, PORTxn=0) ke kondisi output high (DDxn=1, PORTxn=1) maka harus ada kondisi peralihan apakah itu kondisi pull-up enabled (DDxn=0, PORTxn=1)atau kondisi output low (DDxn=1, PORTxn=0). Biasanya, kondisi pull-up enabled dapat diterima sepenuhnya, selama lingkungan impedansi tinggi tidak memperhatikan perbedaan antara sebuah strong high driver dengan sebuah pull-up. Jika ini bukan suatu masalah, maka bit PUD pada register SFIOR dapat diset 1 untuk mematikan semua pull-up dalam semua port. Peralihan dari kondisi input dengan pull-up ke kondisi output low juga menimbulkan masalah yang sama. Kita harus menggunakan kondisi tri-state (DDxn=0, PORTxn=0) atau kondisi output high (DDxn=1, PORTxn=0) sebagai kondisi transisi.
Tabel 2.2 Konfigurasi pin
2.3 Driver Motor
2.3.1 Pengertian Driver Motor
Gambar 2.8 IC L298N
Ada beberapa macam model rangkaian driver di antaranya yaitu Driver Motor Transistor, Driver motor Relay, Dan driver motor dengan IC, Khusus pada tulisan kali ini saya bahas tentang driver motor yang menggunakan IC L298.
Gambar 2.10 Pin conections Ic L298N
Berikut rangkaian umum untuk driver ini:
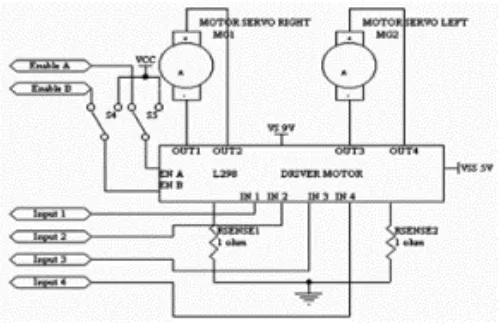
Gambar 2.11 Driver motor DC
penuh dan PWM (Pulse Width Modulation) untuk kecepatan rotasi yang bervariasi tergantung dari level highnya. Ilustrasinya sebagai berikut:
Gambar 2.12 Ilustrasi PWM untuk kendali kecepatan
Dari gambar 2.13 dapat dijelaskan jika dikehendaki kecepatan penuh maka diberikan 5 Volt konstan, jika dikehendaki kecepatan bervariasi maka diberikan pulsa yang lebar dengan level ‟1‟ dan level ‟0‟ bervariasi. Satu periode pulsa memiliki waktu yang sama sehingga dalam contoh, kecepatan motor akan berubah dari setengah kecepatan penuh menjadi mendekati kecepatan penuh. Jadi yang dirasakan oleh transistor pengendali di dalam chip adalah tegangan rata-ratanya, dimana semakin besar duty cyclenya maka akan menaikkan tegangan rata-rata sehingga arus yang mengalir ke beban motor juga semakin meningkat sehingga mempengaruhi kecepatan motor DC.
Gambar 2.13 Ilustrasi pengendalian arah motor DC
Gambar 2.14 menunjukkan bahwa dengan mengganti polaritas sumber, maka arah putaran akan berlawanan dengan sebelumnya. Ini berlaku untuk motor DC.
Tabel 2.3 Pengendali Ic Driver Motor L298N
Tabel 2.3 berikut ini adalah cara pemasangan dan tabel kebenaran dari kendali motor DC.
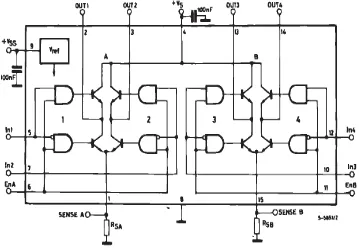
Gambar 2.14 Rangkaian didalam IC driver motor
Dengan chip L298, untuk mengendalikan arah putaran motor digunakan metode bridge-H dari kombinasi transistor. Dengan metode demikian arus yang mengalir ke motor polaritasnya dapat diatur dengan memberikan logika ke transistor Q1 sampai Q4. Pengaturannya seperti tabel kebenaran pada gambar 8. Kondisi high atau level ‟1‟ untuk semua input tidak diizinkan sebab akan mengakibatkan semua transistor aktif dan akan merusakkan transistor karena secara otomatis arus dari kolektor Q1 dan Q2 langsung mengalir ke Q2 dan Q3 sehingga arus sangat besar tanpa melalui beban motor DC. Fungsi Rsense 1 dan 2 adalah untuk mengindera arus untuk keperluan umpan balik kestabilan sistem. 2.4 Dioda LED
LED adalah singkatan dari Light Emiting Dioda, merupakan komponen yang dapat mengeluarkan emisi cahaya.LED merupakan produk temuan lain setelah dioda. Strukturnya juga sama dengan dioda, tetapi belakangan ditemukan bahwa elektron yang menerjang sambungan P-N juga melepaskan energi berupa energi panas dan energi cahaya. LED dibuat agar lebih efisien jika mengeluarkan cahaya. Untuk mendapatkna emisi cahaya pada semikonduktor, doping yang pakai adalah galium, arsenic dan phosporus. Jenis doping yang berbeda menghasilkan warna cahaya yang berbeda pula.
Gambar 2.15 Simbol Led
Pada saat ini warna-warna cahaya LED yang banyak ada adalah warna merah, kuning dan hijau.LED berwarna biru sangat langka. Pada dasarnya semua warna bisa dihasilkan, namun akan menjadi sangat mahal dan tidak efisien. Dalam memilih LED selain warna, perlu diperhatikan tegangan kerja, arus maksimum dan disipasi daya-nya. Rumah (chasing) LED dan bentuknya juga bermacam-macam, ada yang persegi empat, bulat dan lonjong.
2.4.2 Prinsip kerja LED
Di dalam LED terdapat sejumlah zat kimia yang akan mengeluarkan cahaya jika elektron-elektron melewatinya. Dengan mengganti zat kimia ini, kita dapat mengganti panjang gelombang cahaya yang dipancarkan, seperti infrared,hijau/biru/merah/ultraviolet.
Kita sudah tau bahwa LED adalah dioda, sehingga memiliki kutup ( polar ). Arah arus konvensional hanya dapat mengalir dari anoda ke katoda. Dan bagaimana kita dapat membedakan kutup-kutupnya ?? Perhatikan bahwa 2 kawat ( kaki ) pada LED memiliki panjang yang berbeda. Kawat yang panjang adalah anoda sedangkan yang pendek adalah katoda. Ada cara lain untuk melihat dari atas, kamu akan mengetahui ada sisi yang datar. Sisi yang datar itu adalah katoda. Jika kamu lihat ke dalamnya, kamu dapat membedakannya berdasarkan bentuk yang terlihat.
Gambar 2.16. Bentuk dalam LED
Sedangkan LED bertipe surface mount ( SMD ) Prinsip kerjanya masih sama, hanya bentuknya saja yang berbeda. Ada beberapa cara yang berbeda untuk menandai kutup dari LED SMD, Jadi cara yang terbaik adalah mengecek pada datasheet.
Gambar 2.17. kutup dari LED SMD
maksimum dan juga tegangan breakdwon-nya. Zener banyak digunakan untuk aplikasi regulator tegangan (voltage regulator). Zener yang ada dipasaran tentu saja banyak jenisnya tergantung dari tegangan breakdwon-nya. Di dalam datasheet biasanya spesifikasi ini disebut Vz (zener voltage) lengkap dengan toleransinya, dan juga kemampuan dissipasi daya.
2.5 Motor DC
Suatu mesin listrik yang berfungsi sebagai motor listrik apabila terjadi proses konversi energi listrik menjadi energi mekanik di dalamnya. Motor DC adalah motor yang memerlukan suplai tegangan searah pada kumparan jangkar dan kumparan medan untuk diubah menjadi energi mekanik. Berdasarkan karakteristiknya, motor arus searah ini mempunyai daerah pengaturan putaran yang luas dibandingkan dengan motor arus bolak-balik, sehingga sampai sekarang masih banyak digunakan pada pabrik-pabrik yang mesin produksinya memerlukan pengaturan putaran yang luas.
2.5.1 Prinsip kerja motor Dc
Pada motor DC, kumparan medan yang dialiri arus listrik akan menghasilkan medan magnet yang melingkupi kumparan jangkar dengan arah tertentu. Konverter energi baik energi listrik menjadi energi mekanik (motor) maupun sebaliknya dari energi mekanik menjadi energi listrik (generator) berlangsung melalui medium medan magnet. Energi yang akan diubah dari suatu sistem ke sistem yang lain, sementara akan tersimpan pad medium medan magnet untuk kemudian dilepaskan menjadi energi system lainya.
Gambar 2.19 Kerangka Motor Dc
Gerak atau putaran yang dihasilkan oleh motor arus searah diperoleh dari interaksi dua buah medan yang dihasilkan oleh bagian „jangkar„ (armature) dan bagian „medan„ (field) dari motor arus searah. Pada gambar ilustrasi diatas, bagian medan berbentuk suatu kumparan yang terhubung ke sumber arus searah. Sedangkan bagian jangkar ditunjukkan sebagai magnet permanen (U-S), bagian jangkar ini tidak harusberbentuk magnet permanen, bisa juga berbentuk belitan yang akan menjadi elektro-magnet apabila mendapatkan sumber arus searah. Sehingga apabila motor arus searah kita berjenis jangkar belitan, maka kita harus menyediakan dua sumber arus searah, satu untuk bagian jangkarnya, satu lagi untuk bagian medannya. Bagian lain yang tidak kalah penting pada motor arus searah adalah adanya „komutator‟ (comutator). Komutator merupakan suatu konverter mekanik yang membuat arus dari sumber mengalir pada arah yang tetap walaupun belitan medan berputar. Komutator berpasangan dengan „cincin belah„ (slip-rings) untuk menjalankan tugas yang saya sebut baru saja. Pada gambar ilustrasi diatas, gambar lingkaran yang dibagi menjadi dua buah dan terhubung ke bagian belitan medan merupakan cincin belah yang saya maksud. Bagian yang digambarkan berbentuk kotak menempel pada cincin belah tersebut yang dinamakan komutator. Tentu saja pada aplikasi yang sebenarnya, jumlah cincin belah tidak hanya dua dan terhubung ke sejumlah banyak belitan medan.
Gambar 2.20 Aturan tangan kanan