LAPORAN PRAKTIKUM
SENSOR DAN ROBOTIKA 2
dibuat untuk memenuhi laporan mingguan praktikum Mata Kuliah Sensor dan Robotika
DISUSUN OLEH :
YOSEF RADITYA SENOAJI 213341024 REZA MALIKI AKBAR 214341097 YANA HANDRIYANA 213341023
3AEA
TEKNIK OTOMASI MANUFAKTUR DAN MEKATRONIKA POLITEKNIK MANUFAKTUR NEGERI BANDUNG
POLITEKNIK MANUFAKTUR NEGERI BANDUNG
Catatan Mingguan Praktik AE
Program : SNR2
Hari / Tanggal Kegiatan Waktu
Senin, 9 Mei 2016
Apel Pagi 06.55 – 07.00
Penjelasan praktikum sensor dan robotik 07.00 – 09.00
Istirahat 09.00 – 09.20
Mempelajari manual book robot KUKA 09.20 – 11.40
Istirahat 11.40 – 12.40
Mempelajari manual book robot KUKA 12.40 – 15.10
Apel Sore 15.10 – 15.20
Selasa, 10 Mei 2016
Apel Pagi 06.55 – 07.00
Mempelajari manual book robot KUKA 07.00 – 09.00
Istirahat 09.00 – 09.20
Mempelajari cara membuat program pergerakan robot 09.20 – 11.40
Istirahat 11.40 – 12.40
Mempelajari cara membuat program pergerakan robot 12.40 – 15.10
Apel Sore 15.10 – 15.20
Rabu, 11 Mei 2016
Apel Pagi 06.55 – 07.00
Mempelajari cara membuat program pergerakan robot berulang-ulang
07.00 – 09.00
Istirahat 09.00 – 09.20
Mempelajari cara membuat program pergerakan robot berulang-ulang
09.20 – 11.40
Istirahat 11.40 – 12.40
Mempelajari cara membuat program pergerakan robot berulang-ulang
Pembuatan program pergerakan robot 07.00 – 09.00
Istirahat 09.00 – 09.20
Pembuatan program pergerakan robot 09.20 – 11.40
Istirahat 11.40 – 12.40
Pengujian program teaching yang telah dibuat 12.40 – 15.10
Apel Sore 15.10 – 15.20
Jumat, 13 Mei 2016
Apel Pagi 06.55 – 07.00
Pembuatan laporan 07.00 – 09.00
PENDAHULUAN
1.1.Robot
Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program yang telah didefinisikan terlebih dulu (kecerdasan buatan). Istilah robot berawal
bahasa Cheko “robota” yang berarti pekerja atau kuli yang tidak mengenal lelah
atau bosan.
Adapun beberapa jenis robot berdasarkan fungsi dan wilayah kerjanya, diantaranya; a) Robot beroda
b) Robot manipulator c) Robot humanoid d) Robot berkaki e) Flying robot f) Under water robot
Robot yang dipakai pada praktikum robotik adalah jenis robot manipulator KUKA. Robot manipulator sendiri adalah robot yang berfungsi secara umum untuk memindahkan atau mengangkat benda kerja, seiring dengan perkembangan muncul pula robot manipulator yang berfungsi untuk proses pengelasan. Robot jenis ini banyak diaplikasikan pada berbagai bidang diantaranya;
a) Las titik pada karoseri badan mobil b) Las busur
1.2.KUKA KRC2sr
1.2.1.Hardware KUKA KRC2sr
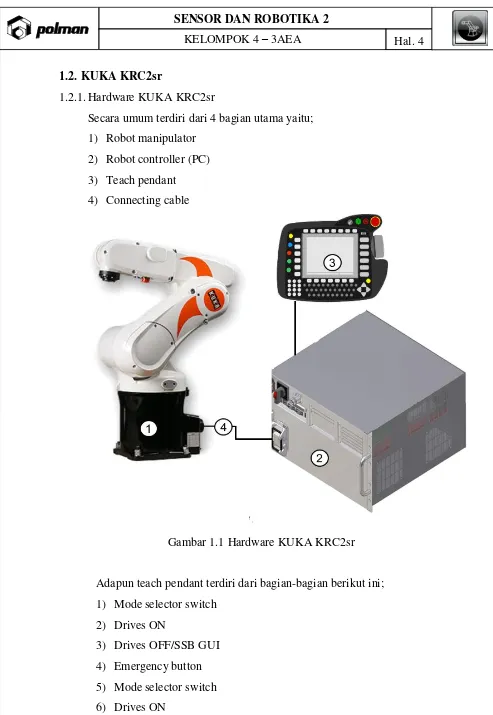
Secara umum terdiri dari 4 bagian utama yaitu; 1) Robot manipulator
2) Robot controller (PC) 3) Teach pendant
4) Connecting cable
Gambar 1.1 Hardware KUKA KRC2sr
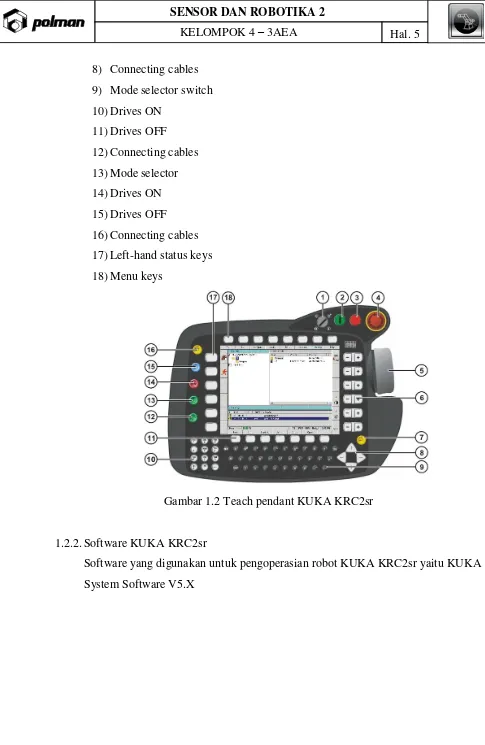
Adapun teach pendant terdiri dari bagian-bagian berikut ini; 1) Mode selector switch
2) Drives ON
3) Drives OFF/SSB GUI 4) Emergency button 5) Mode selector switch 6) Drives ON
8) Connecting cables 9) Mode selector switch 10)Drives ON
11)Drives OFF
12)Connecting cables 13)Mode selector 14)Drives ON 15)Drives OFF 16)Connecting cables 17)Left-hand status keys 18)Menu keys
Gambar 1.2 Teach pendant KUKA KRC2sr
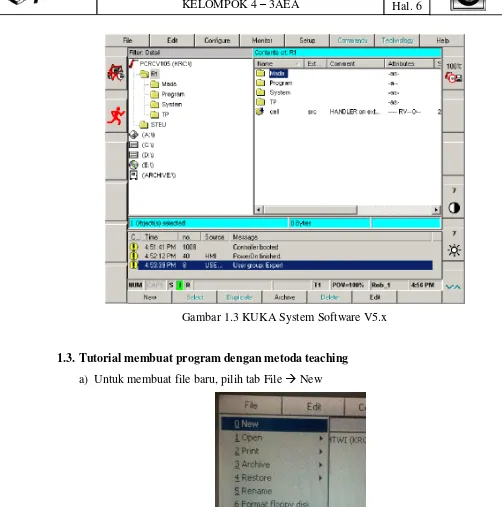
1.2.2.Software KUKA KRC2sr
Gambar 1.3 KUKA System Software V5.x
1.3.Tutorial membuat program dengan metoda teaching
b) Setelah itu akan muncul tampilan seperti di bawah ini.
c) Kemudian masukkan program diantara line DEFAULT dan line HOME, dengan cara menggerakkan robot ke titik yang diinginkan.
e) Untuk menambah gerakan gripper mencekam dan melepas, pilih tab Command
Logic Output. Untuk gripper open pilih alamat 9, sedangkan untuk gripper close pilih alamat 11.
1.4.Fungsi LOOP
Pada pemrograman robot KUKA terdapat fungsi LOOP, yaitu fungsi yang memungkinkan robot melakukan pengulangan gerakan. Fungsi LOOP akan memberikan perintah pada robot untuk melakukan pengulangan gerakan hingga syarat yang diinginkan terpenuhi, misalnya gerakan diulang hingga 10 kali.
1.5.Jenis jenis LOOP
LOOP sendiri terbagi menjadi beberapa jenis fungsi, diantaranya; - Endless loop
- Counting loop
Pada counting loop, robot akan melakukan pergerakan secara berulang terus menerus dan sambil menghitung jumlah pengulangan gerakan, robot akan berhenti bila syarat jumlah pengulangan gerakan telah mencapai nilai yang ditentukan.
- Conditional loop
BAB 2
PRAKTIKUM
1.2.Tujuan
a) Mahasiswa mampu mengoperasikan dan memprogram gerakan - gerakan sederhana pada robot KUKA KRC2SR.
b) Mahasiswa mampu melakukan metoda teaching untuk pergerakan robot melalui Teach Pendant
1.3.Alat
a) Robot KUKA KRC2sr...1 unit 1.4.Hasil praktikum
Pada program yang dibuat adalah program robot mengambil benda kerja (balok hitam) lalu menaruhnya kembali di atas tempat benda kerja. Terdapat dua tipe program yang dibuat yaitu program robot berulang kerjanya menuju kembali ke home position, lalu program robot berulang kerjanya menuju kembali ke tempat benda kerja.
a) Program Endless Loop Menuju Home
DEF Kel4_home_loop() INI
LOOP
PTP HOME Vel=100% DEFAULT WAIT TIME=1 sec
PULSE 9 ‘Gripper Open’ State=TRUE CONT Time=3 sec
PTP P2 Vel=100% PDAT15 Tool[1]:tcp1 Base[0] PTP P3 Vel=100% PDAT3 Tool[1]:tcp1 Base[0] PTP P10 Vel=100% PDAT11 Tool[1]:tcp1 Base[0] PTP P11 Vel=50% PDAT12 Tool[1]:tcp1 Base[0] PTP P15 Vel=20% PDAT17 Tool[1]:tcp1 Base[0] PTP P13 Vel=20% PDAT14 Tool[1]:tcp1 Base[0] WAIT TIME=1 sec
PULSE 11 ‘Gripper Close’ State=TRUE CONT Time=3 sec
PTP P18 Vel=80% PDAT20 Tool[1]:tcp1 Base[0] PTP P3 Vel=100% PDAT3 Tool[1]:tcp1 Base[0] PTP P10 Vel=50% PDAT11 Tool[1]:tcp1 Base[0] PTP P11 Vel=50% PDAT12 Tool[1]:tcp1 Base[0] PTP P15 Vel=20% PDAT14 Tool[1]:tcp1 Base[0] PTP P13 Vel=20% PDAT17 Tool[1]:tcp1 Base[0] WAIT TIME=1 sec
PULSE 11 ‘Gripper Close’ State=TRUE CONT Time=3 sec
PTP P14 Vel=10% PDAT16 Tool[1]:tcp1 Base[0] PTP P16 Vel=100% PDAT18 Tool[1]:tcp1 Base[0] PTP P21 Vel=80% PDAT23 Tool[1]:tcp1 Base[0] PTP P17 Vel=100% PDAT19 Tool[1]:tcp1 Base[0] PTP P18 Vel=60% PDAT20 Tool[1]:tcp1 Base[0] PTP P19 Vel=10% PDAT21 Tool[1]:tcp1 Base[0] WAIT TIME=1 sec
PULSE 9 ‘Gripper Open’ State=TRUE CONT Time=3 sec PTP P20 Vel=100% PDAT22 Tool[1]:tcp1 Base[0]
PTP HOME Vel=100% DEFAULT ENDLOOP
END
b) Program Endless Loop Menuju Tempat Benda Kerja
DEF Kel4_tmpbndkrj_loop() INI
PTP HOME Vel=100% DEFAULT WAIT TIME=1 sec
PULSE 9 ‘Gripper Open’ State=TRUE CONT Time=3 sec
PTP P2 Vel=100% PDAT15 Tool[1]:tcp1 Base[0] PTP P3 Vel=100% PDAT3 Tool[1]:tcp1 Base[0] LOOP
PTP P15 Vel=20% PDAT17 Tool[1]:tcp1 Base[0] PTP P13 Vel=20% PDAT14 Tool[1]:tcp1 Base[0] WAIT TIME=1 sec
PULSE 11 ‘Gripper Close’ State=TRUE CONT Time=3 sec
PTP P14 Vel=10% PDAT16 Tool[1]:tcp1 Base[0] PTP P16 Vel=100% PDAT18 Tool[1]:tcp1 Base[0] PTP P21 Vel=80% PDAT23 Tool[1]:tcp1 Base[0] PTP P17 Vel=100% PDAT19 Tool[1]:tcp1 Base[0] PTP P18 Vel=80% PDAT20 Tool[1]:tcp1 Base[0] PTP P19 Vel=10% PDAT21 Tool[1]:tcp1 Base[0] WAIT TIME=1 sec
PULSE 9 ‘Gripper Open’ State=TRUE CONT Time=3 sec
PTP P20 Vel=100% PDAT22 Tool[1]:tcp1 Base[0] PTP P22 Vel=100% PDAT24 Tool[1]:tcp1 Base[0] PTP P23 Vel=100% PDAT25 Tool[1]:tcp1 Base[0] ENDLOOP
PTP P27 Vel=100% PDAT29 Tool[1]:tcp1 Base[0] PTP HOME Vel=100% DEFAULT
Gambar Pergerakan Program Endless Loop Menuju Home
Gambar 2.1 Home Position awal
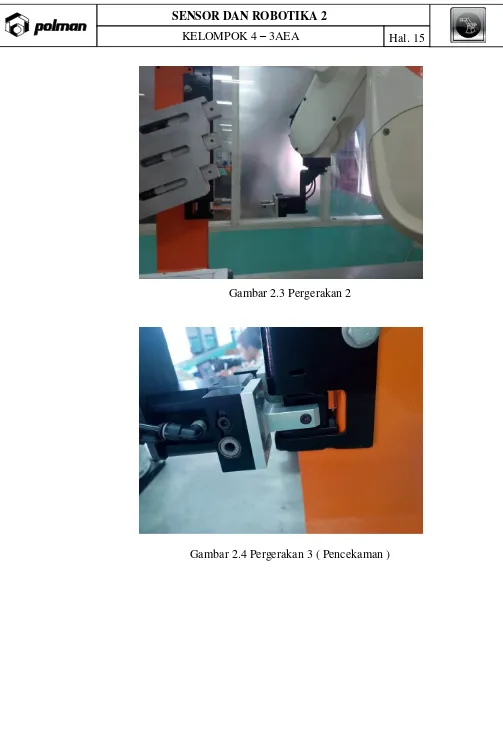
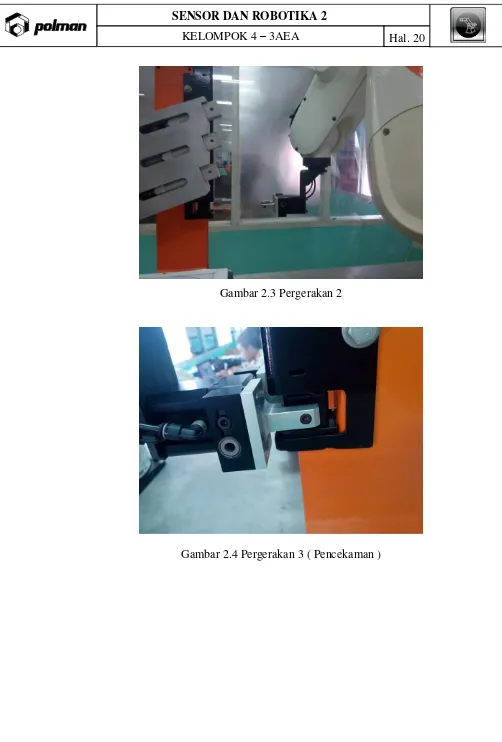
Gambar 2.3 Pergerakan 2
Gambar 2.5 Pergerakan 4
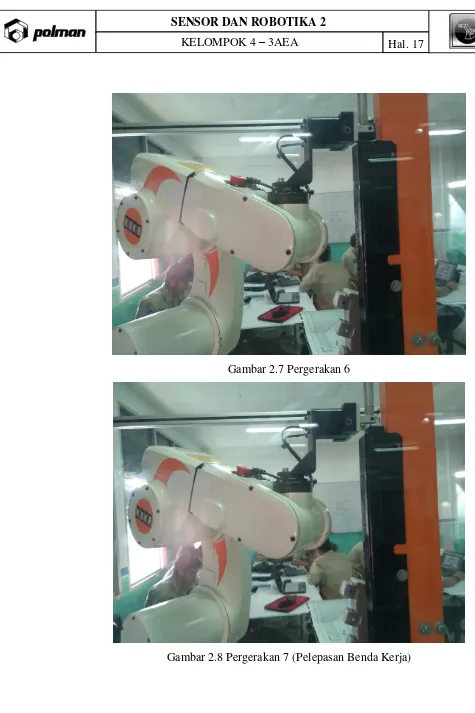
Gambar 2.7 Pergerakan 6
Gambar Pergerakana Program Endless Loop Menuju Tempat Benda
Kerja
Gambar 2.1 Home Position awal
Gambar 2.3 Pergerakan 2
Gambar 2.5 Pergerakan 4
Gambar 2.7 Pergerakan 6
Gambar 2.9 Pergerakan 8
1.5.Analisis
a. Program Endless Loop Menuju Home
Pergerakan 1
Diawali dengan bergeraknya gripper 180 derajat bersamaan dengan bergeraknya axis 2 arah negatif dan axis 3 arah positif.
Pergerakan 2
Axis 1 bergerak arah positif dan axis 6 bergerak arah negatif untuk mempertahankan posisi agar sejajar dengan tiang benda kerja.
Pergerakan 3
Axis 2 dan axis 3 bergerak secara kombinasi supaya gripper bergerak maju lurus dengan tiang benda kerja. Setelah mencapai posisi untuk mencekam gripper maka gripper akan mencekam benda kerja.
Pergerakan 4
Benda kerja ditarik menjauhi tiang benda kerja dengan pergerakan kombinasi axis 2 dan axis 3 serta axis 6. Yang perlu di perhatikan adalah pergerakan ini memerlukan pergerakan yang lurus sehingga terhindar dari benturan antara gripper dan tiang. Pergerakan 5
Benda kerja diangkat keatas dengan axis 2 dan 3, posisi gripper dalam keadaan menganga ke atas.
Pergerakan 6
Benda kerja menuju tempat penyimpanan atas. Pergerakan 7
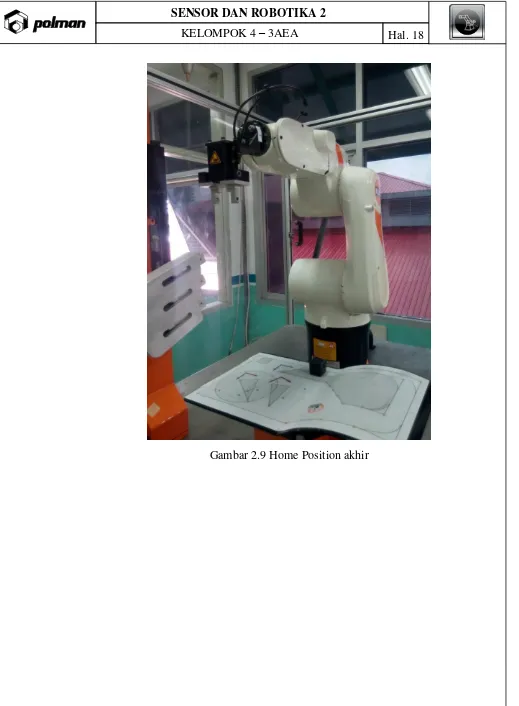
Pergerakan Akhir
Menuju ke posisi home seperti semula, lalu mengulang proses ke pergerakan 1, prosesnya tak terhingga hingga dihentikan oleh operator.
Gripper lalu membuka dan benda tersimpan di atas. b. Program Endless Loop Menuju Tempat Benda Kerja
Pergerakan 1-7
Pergerakan 1 dan 4 sama dengan program sebelumnya. Pergerakan 8 dan 9
BAB 3
PENUTUP
3.1.Kesimpulan
Pada praktikum sensor dan robotik minggu ke 1, dalam mengoperasikan robot untuk pergerakan sederhana dapat dilakukan dengan Teach Pendant yang telah tersedia. Metoda pemrograman nya dapat dilakukan dengan metoda Teaching, yaitu metoda dengan menggerakan axis pada robot, sehingga pergerakan yang dilakukan oleh robot adalah point to point.
3.2.Saran