LAPORAN AKHIR
PRAKTIKUM MEKATRONIKA TAHUN 2014/2015
IMPLEMENTASI ILMU MEKATRONIKA PADA PROTOTYPE ROBOT
PENDETEKSI GAS METANA SKALA LABORATORIUM BERBASIS MIKROKONTROLER ARDUINO UNO R3
Oleh :
KELOMPOK : 14
ANGGOTA : 1. Arafi Adi Putra (1210912003)
2. Arief Mandra S (1210912007)
3. Erit Fernando (1210912056)
4. Fitrah Qalbina (1210913044) 5. Khoirul Ikhwan (1210913046) 6. Rudi Herawaldi (1210912047) 7. Yogi Kurnia Putra (1210913010)
JURUSAN TEKNIK MESIN FAKULTAS TEKNIK
UNIVERSITAS ANDALAS
ABSTRAK
Perkembangan teknologi saat ini memacu masyarakat ilmiah untuk meneliti dan menciptakan alat baru agar bisa lebih mengefesienkan pekerjaan manusia, penerapan-penerapan sensor dan robot otomatis juga semakin laku dipasaran. Maka timbul lah ide untuk membuat sebuah robot otomatis pendeteksi gas metana,gas metana merupakan gas beracun yang dapat menimbulkan kematian bagi makhluk hidup namun gas tersebut tidak bewarna. Sehingga dibuat sebuah alat yang bertujuan untuk memudahkan mendeteksi gas metana tersebut. Robot pendeteksi ini memanfaatkan sensor gas metana MQ-4 dan menggunakan aplikasi hp android yaitu SENA BTerm, penggunaan bluetooth MC-05 juga berperan penting pada robot pendeteksi ini.
Berdasarkan hasil implementasi robot otomatis pendeteksi gas metana ini menggunakan prinsip mekatronika secara baik dan kompitibel namun memiliki keterbatasan dalam jangkauan atau jarak deteksi yang hanya sekitar 30 m.
i
KATA PENGANTAR
Puji beserta syukur kami ucapkan atas kehadirat Allah SWT yang telah
memberikan segala rahmat serta karunia-Nya, sehingga kami dapat menyelesaikan
Laporan Akhir Praktikum Mekatronika di Laboratorium Mekatronika.
Laporan ini ditulis untuk memenuhi persyaratan dalam meyelesaikan mata
kuliah Mekatronika berserta praktikum Mekatronika dari awal hingga selesai.
Pelaksanaan dan penyusunan laporan ini tidak mungkin terlaksana tanpa bantuan
dan dukungan dari berbagai pihak. Oleh karena itu, penulis ingin menyampaikan
terima kasih kepada :
1. Bapak Zulkifli Amin Ph.D, Bapak Firman Ridwan Ph.D, dan Bapak
Dr.-Ing. Agus Sutanto, yang telah memberikan pengetahuan dasar mekatronika
pada mata kuliah Mekatronika.
2. Bapak Zulkifli Amin Ph.D sebagai Kepala Laboratorium Mekatronika.
3. Muhammad Adha selaku koordas Laboratorium Mekatronika dan KM
Abdul Rozak selaku koorprak Laboratorium Mekatronika.
4. Ahmad Affandi selaku asisten yang telah memberikan bimbingan selama
praktikum dan penyusunan laporan akhir ini.
5. Seluruh asisten Mekatronika.
6. Rekan-rekan kelompok 14 jurusan Teknik Mesin Angkatan 2012 yang
telah memberikan saran dan bantuannya, serta semua pihak yang
membantu kami baik secara langsung maupun tidak langsung.
Semoga dengan laporan akhir ini dapat diterima dan memberikan manfaat
bagi yang membaca, dan sangat kami harapkan kritik dan saran untuk
kesempurnaan laporan akhir yang lain untuk ke depannya.
Padang , November 2014
DAFTAR ISI
2.1. Teori Dasar Mekatronika ... 32.1.1. Mekatronika ... 3
2.2. Teori Dasar Komponen Elektronika ... 16
2.2.3. Kontroller (Microcontroller Arduino Uno)... 46
2.2.4. Aktuator ... 2.2.4.1. Motor DC ... 47
2.2.4.2. Buzzer ... 48
2.2.5. Interface (HP Arduino) ... 49
BAB III METODOLOGI 3.1 Flow Chart Penulisan Laporan ... 51
3.2 Prinsip Kerja Alat ... 52
3.3 Skema Rangkaian ... 55
BAB IV HASIL DAN PEMBAHASAN 4.1 Gambar Alat (Semua Tampak) ... 58
4.2 Analisa ... 60
4.2.1. Rangkaian ... 60
4.2.2. Program ... 62
4.2.3. Kelebihan dan Kekurangan Alat ... 63
BAB V PENUTUP 5.1 Kesimpulan ... 64
5.2 Saran ... 64
DAFTAR PUSTAKA
LAMPIRAN
Lampiran 1 : Lembar Asistensi
DAFTAR TABEL
DAFTAR GAMBAR
Gambar 2.1 Bentuk Bagan dari Ilmu Mekatronika ... 3
Gambar 2.2 Sistem Mekatronika ... 4
Gambar 2.3 Skema Sistem Kontrol Terbuka ... 5
Gambar 2.4 Skema Sistem Kontrol Tertutup ... 5
Gambar 2.5 Diagram Ketepatan dan Ketelitian... 6
Gambar 2.6 Grafik Sensitivitas ... 6
Gambar 2.13Metal Sensor Detector ... 9
Gambar 2.14. Potensiometer ... 9
Gambar 2.15 Termokopel ... 9
Gambar 2.16 IC (Intergrate Circut) ... 10
Gambar 2.17 MC (Micro Controller) ... 10
Gambar 2.18 PLC (Programabble Logic Control) ... 11
Gambar 2.19 MP (Micro Processor) ... 11
Gambar 2.20 PC (Personal Computer) ... 12
Gambar 2.21 Motor DC ... 12
Gambar 2.22 LED ... 12
Gambar 2.23 Pnuematic Slinder ... 13
Gambar 2.24 Dongkrak Hidrolik ... 13
Gambar 2.25 Grafik Sinyal Analog ... 14
Gambar 2.26 Grafik Sinyal Digital ... 14
Gambar 2.27 Resistor ... 17
Gambar 2.29 NIST Standard Resisitor ... 18
Gambar 2.30Wirewound High Power Resistor ... 19
Gambar 2.31Fuse Resistor ... 19
Gambar 2.32Carbon Film Resistor ... 20
Gambar 2.33 Struktur Penyusun Carbon Film Resistor ... 20
Gambar 2.34Metal Carbon Film Resistor ... 20
Gambar 2.35 Struktur Penyusun Metal Carbon Film Resistor ... 21
Gambar 2.36Foil Resistor ... 21
Gambar 2.37Power Film Resistor ... 22
Gambar 2.38 Potensiometer ... 22
Gambar 2.39 Simbol Potensiometer ... 22
Gambar 2.40 Trimpot ... 23
Gambar 2.41 Simbol Trimpot ... 23
Gambar 2.42 NTC dan PTC ... 24
Gambar 2.43Light Dependent Resistor (LDR) ... 24
Gambar 2.44 Simbol Light Dependent Resistor (LDR) ... 24
Gambar 2.45 VDR ... 25
Gambar 2.46Multitester Analog ... 25
Gambar 2.47 Skema Pembacaan Nilai Resistor ... 26
Gambar 2.48 Contoh Warna Resistor ... 27
Gambar 2.49 Rangkaian Seri Resistor ... 27
Gambar 2.50 Rangkaian Paralel Resistor ... 28
Gambar 2.51 Rangkaian Seri Paralel Resistor ... 28
Gambar 2.52 Simbol Kapasitor ... 29
Gambar 2.53 Kapasitor Tetap dan Simbolnya... 29
Gambar 2.54 Kapasitor Trimmer dan Simbolnya ... 30
Gambar 2.55 Kapasitor Varco dan Simbolnya ... 30
Gambar 2.56 Kapasitor Elektrolit ... 31
Gambar 2.57 Kapasitor Tantalun... 31
Gambar 2.59 Kapasitor Polyprolyene ... 32
Gambar 2.60 Kapasitor Kertas ... 32
Gambar 2.61 Kapasitor Mica... 32
Gambar 2.62 Kapasitor Keramik ... 32
Gambar 2.63 Kapasitor Epoxy ... 33
Gambar 2.64 Kapasitor Variabel ... 33
Gambar 2.65 Pengukuran pada Kapasitor ... 33
Gambar 2.66 Simbol Dioda ... 35
Gambar 2.67 Dioda dan Simbol Dioda Rectifier ... 35
Gambar 2.68 Dioda Zenner dan Simbolnya ... 35
Gambar 2.69 Gambar dan Simbol LED ... 36
Gambar 2.70 Warna Dioda ... 37
Gambar 2.71 Gambar dan Simbol Dioda Cahaya (Photodiode) ... 38
Gambar 2.72 Gambar dan Simbol Dioda Varco... 38
Gambar 2.73 Gambar dan Aliran Arus Dioda ... 39
Gambar 2.74 Penggunaan Multitester pada Dioda ... 40
Gambar 2.75 Rangkaian Minimum IC H Bridge L298 ... 41
Gambar 2.82Interface Microcontroller Arduino through HP ... 50
Gambar 3.7 Skema Rangkaian Arduino ... 56
Gambar 3.8 Skema Rangkaian Driver Motor ... 56
Gambar 3.9 Skema Rangkaian Buzzer LED Indikator ... 57
Gambar 3.10 Skema Rangkaian LED Penerangan ... 57
Gambar 4.1 Robot Keseluruhan ... 58
Gambar 4.2 Foto Alat dari Berbagai Posisi ... 59
Gambar 4.3 Ban, Gearbox, danMotor DC ... 59
Gambar 4.4 Rangkaian Sensor Gas Metana ... 61
Gambar 4.5 Rangkaian Arduino, LED Penerang Belakang, dan Terminal Catu Daya ... 61
DAFTAR LAMPIRAN
Lampiran 1 : Lembar Asistensi
Dalam kehidupan sehari-hari dapat kita rasakan perkembangan ilmu
mekatronika menjadi cukup pesat, baik dalam kesharian kita ataupun di dunia
industri. Hal ini dapat dilihat dari alat-alat ektronika yang sering digunakan seperti
hand phone, komputer, kamera digital, tablet, dan produk elektronika lainnya. Hal ini
juga dapat kita lihat pada sistem pintu otomatis yang ada di mall, hotel, perkantoran
dan tempat lainnya yang menggunakan sistem otomasi suatu alat dalam menjalankan
fungsinya.
Pada dunia industri, sudah banyak pabrik-pabrik meggunakan sistem kerja
alat secara otomasi.Peralatan yang digunakan untuk membuat atau merakit produk
dibuat sedemikian rupa untuk dapat bekerja 24 jam dalam sehari. Semua hal tersebut
tidak terlepas dari penggunaan komponen-komponen elektronika,
rangkaian-rangkaian elektronika, dan sistem mekatatronika. Kita sebagai calon sarjana teknik
perlu mengetahuinya karena berhubungan dengan dengan dunia keteknikan.
Di industri pertambangan sering terjadi kecelakaan yang diakibatkan karena
kebocoran gas akibat penggalian. Beberapa pengalian yang mengalami kebocoran
gas, menghasilkan gas yang dapat membahayakan kesehatan bahkan dapat
menyebabkan kematian. Beberapa diantaranya gas yang tidak berwarna dan tidak
berbau seperti gas metana, seperti yang pernah terjadi di industri tambang batu bara
di Sawah Lunto, Sumatera Barat. Hal ini menyebabkan terjadinya kesulitan dalam
mendeteksi gas metana yang tergolong gas berbahaya tersebut. Oleh sebab itu,
timbulnya ide untuk membuat robot yang mampu mendeteksi kebocoran gas metana
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 2
1.2 Tujuan
1. Mengetahui sistem mekatronika.
2. Mengetahui aplikasi sistem mekatronika
3. Mengetahui komponen dasar elektronika.
4. Mengetahui prinsip kerja alat
1.3Manfaat
Melalui praktikum ini kita mendapatkan ilmu pengetahuan tentang ilmu
mekatronika seperti sistem mekatronika, jenis-jenis dan prinsip kerja dari alat-alat
elektonika serta rangkaian elektronika. Kita juga dapat mengaplikasikan nya dalam
sistem yang sederhana serta membantu kita pada dunia kerja yang sudah banyak
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 3
BAB II
TINJAUAN PUSTAKA
2.1 Teori Dasar Mekatronika 2.1.1 Mekatronika
Mekatronika adalah integrasi yang sinergis antara disiplin ilmu
mekanika, elektronika dan sistem kontrol dalam peracangan suatu produk
secara otomasi untuk meringankan pekerjaan manusia.
Gambar 2.1 Bentuk Bagan Dari Ilmu Mekatronika
Bagan Mekatronika di atas adalah bentuk sedehana pembentukan
ilmu mekatronika. Terdiri atas dua lapisan fisika dan logika, dan tiga
dasar ilmu utama elektronika, informatika dan mekanika.
2.1.2 Sistem Mekatronika
Sistem merupakan setiap proses yang memiliki input dan output.
Sistem Mekatronika merupakan sistem sederhana yang membentuk suatu
fungsi yang cerdas, yang terdiri dari
Sensor
Kontroller
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 4
Gambar 2.2 Sistem mekatronika
Dari gambar sistem mekatronika diatas dapat dilihat bahwa sensor yang
mendeteksi dan memberikan sinyal kepada kontroler. Sinyal dari sensor diteruskan
ke kontroler untuk diolah. Kemudian diteruskan ke aktuator sebagai pengeksekusi
sinyal.
Sistem mekatronika sangat terkait erat dengan:
Otomasi dari produk dan proses
Otomasi adalah aspek mental, seperti mengawasi, mengendalikan aktivasi
dilakukan oleh sistem, sedangkan mekanisasi adalah aspek fisik yang digantikan
oleh mesin.
Misalnya pada mesin bubut adalah mekanisasi dari suatu proses
pemesinan, sedangkan mesin bubut CNC (pengendalian proses bubut dilakukan
oleh mesin) adalah otomasi suatu proses pemesinan.
Sistem Kontrol
Sistem kontrol adalah sistem yang menjaga suatu besaran keluaran
(temperatur, ketinggian air, putaran) relatif konstan. Defenisi sistem pada sistem
kontrol ditunjukkan pada suatu kotak hitam yang memiliki input dan output.
Misalnya motor dapat dipandang sebagai suatu sistem dengan input energi listrik
dan energi mekanik (gerak rotasi) sebagai output.
Sistem kontrol dibedakan menjadi dua, yaitu sistem kendali loop terbuka
dan sistem kendali loop tertutup, sebagai berikut:
1) Sistem kontrol terbuka
Sistem kontrol terbuka adalah proses pengendalian dimana variabel input
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 5
Input Output
Gambar 2.3 Skema Sistem Kontrol Terbuka
Dari gambar diatas dapat dipahami tidak ada informasi yang dibeikan oleh
peralatan output kepada bagian proses sehingga tidak diketahui apakah hasil
output sesuai dengan yang kita kehendaki.
2) Sistem kontrol loop tertutup
Sistem kontrol loop tertutup adalah suatu proses pengendalian dimana
variabel yang dikendalikan (output) disensor secara kontiniu, kemudian
dibandingkan dengan besaran acuan.
Misalnya pada pendingin ruangan AC (sistem slip dengan pengaturan
temperatur) temperatur diset 20 maka AC akan mati atau stand-by sendiri.
Input Output
Gambar 2.4 Skema Sistem Kontrol Tertutup
2.1.2.1 Sensor
Sensor adalah suatu komponen atau alat yang dapat mendeteksi
suatu besaran atau nilai dan dapat menghasilkan sinyal berdasarkan
kuantitas dan kualitas yang diukur.
A. Karakteristik Sensor : 1. Kecermatan
Ukuran terkecil (skala) yang dapat dirasakan oleh sensor.
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 6
2. Keterulangan/ketepatan
Variasi nilai yang hampir sama dari pengukuran yang berulang-ulang.
3. Ketelitian
Kesesuaian harga yang terukur dengan harga sebenarnya.
Gambar 2.5 Diagram Ketepatan Dan Ketelitian
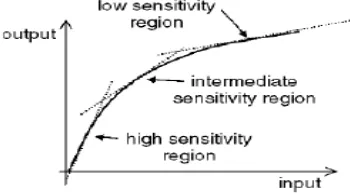
4. Sensitivitas
Kemampuan sensor merasakan suatu perubahan yang kecil.
Gambar 2.6 Grafik Sensitivitas
5. Histerisis
Kesalahan atau eror yang terjadi pada pengukuran secara kontinu dari 2 arah
yang berlawanan.
Output
Input
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 7
6. Non-linearity error
Kesalahan yang terjadi karena sensor tidak linier (walaupun secara teoritis
sensor dinyatakan linier)
Gambar 2.8 Grafik Non-Linearity Error
7. Range
Range merupakan batas minimum dan maksimum yang mampu ditangangkap
oleh sensor
B. Jenis-jenis Sensor
1) Berdasarkan kondisi kerja
Sensor Kontak
Antara sensor dan besaran atau nilai yang diukur saling berinteraksi dan
saling mempengaruhi.
Contoh : metal sensor detector, LVDT Load cell dan Strain gage.
Gambar 2.9 LVDT Load cell error output
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 8
Sensor Non Kontak
Antara sensor dan besaran atau nilai yang diukur tidak saling berinteraksi
dan besaran atau nilai yang diukur mempengaruhi sensor.
Contoh :LDR, Photocell, termokopel dan thermistor.
Gambar 2.10 Thermistor
2) Berdasarkan prinsip kerja
Sensor Mekanik
Sensor yang berpengaruh terhadap perubahan mekanik.
Contoh : Strain gage dan Piezo elektrik.
Gambar 2.11 Strain Gage
Sensor Optik
Sensor yang berpengaruh terhadap perubahan cahaya.
Contoh : Photocell dan LDR.
Gambar 2.12 LDR
Sensor Magnetik
Sensor yang berpengaruh terhadap perubahan secara magnetik.
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 9
Gambar 2.13 Metal Sensor Detector
Sensor Elektrik
Sensor yang berpengaruh terhadap perubahan secara elektrik(arus,
tegangan).
Contoh : potensiometer dan sensor kapasitif.
Gambar 2.14 Potensiometer
Sensor temperatur
Sensor yang berpengaruh terhadap perubahan temperatur.
Contoh : Thermistor dan termokopel.
Gambar 2.15 Termokopel
2.1.2.2 Kontroler
Kontroler adalah suatu komponen atau alat yang berfungsi
menerima sinyal dari sensor ,mengolah sinyal tersebut, dan
mengambil keputusan dari sinyal yang diterima, dan memberikan
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 10
Jenis-jenis kontroler 1) IC (Intergrate Circut)
IC (Integrated Circuit) merupakan suatu komponen semikonduktor
yang di dalamnya terdapat puluhan, ratusan atau ribuan, bahkan lebih
komponen dasar elektronik yang terdiri dari sejumlah komponen resistor,
transistor, diode, dan komponen semikonduktor lainnya. Komponen dalam
IC tersebut membentuk suatu rangkaian yang terintegrasi menjadi sebuah
rangkaian berbentuk chip kecil.
Gambar 2.16 IC (Intergrate Circut) 2) MC (Microcontroller)
Microcontroller adalah suatu alat elektronika digital yang
mempunyai masukan dan keluaran serta kendali dengan program yang bisa
ditulis dan dihapus dengan cara khusus. Sederhananya, cara kerja
mikrokontroler sebenarnya hanya membaca dan menulis data.
Gambar 2.17 MC (microcontroller)
3) PLC(Programabble Logic Control)
Definisi Programmable Logic Controller menurut Capiel (1982)
adalah sistem elektronik yang beroperasi secara dijital dan didisain untuk
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 11
yang dapat diprogram untuk penyimpanan secara internal
instruksi-instruksi yang mengimplementasikan fungsi-fungsi spesifik seperti logika,
urutan, perwaktuan, pencacahan dan operasi aritmatik untuk mengontrol
mesin atau proses melalui modul-modul I/O digital maupun analog.
Gambar 2.18 PLC (Programabble Logic Control) 4) MP (Microprocessor)
Microprocessor adalah sebuah central processing unit
(CPU) elektronik komputer yang terbuat dari transistor mini dan sirkuit
lainnya di atas sebuah sirkuit terintegrasi semikonduktor.
Gambar 2.19 MP (Microprocessor)
5) PC (Personal Computer)
Komputer adalah alat yang dipakai untuk mengolah data menurut
prosedur yang telah dirumuskan. Kata computer semula dipergunakan
untuk menggambarkan orang yang perkerjaannya melakukan perhitungan
aritmatika, dengan atau tanpa alat bantu, tetapi arti kata ini kemudian
dipindahkan kepada mesin itu sendiri. Asal mulanya, pengolahan informasi
hampir eksklusif berhubungan dengan masalah aritmatika, tetapi komputer
modern dipakai untuk banyak tugas yang tidak berhubungan dengan
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 12
Gambar 2.20 PC (Personal Computer)
2.1.2.3 Aktuator
Aktuator adalah suatu komponen atau alat sebagai
pengeksekusi sinyal yang diterima dari kontroller atau menghasilkan
sebuah perubahan secara fisik.
Jenis-jenis aktuator 1) Aktuator elektromekanik
Aktuator yang menggunakan energi listrik untuk mengasilkan perubahan
secara mekanik (gerak).
Contoh : motor DC
Gambar 2.21 Motor DC
2) Aktuator material aktif
Aktuator yang apabila dialiri arus listrik materialnya dapat mengeluarkan
cahaya.
Contoh : LED( (Light Emiting Dioda).
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 13
3) Aktuator tenaga fluida
Aktuator yang menggunakan tekanan fluida sebagai penyebab gerakan.
Aktuator tenaga fluida terbagi atas 2 yaitu :
Pnuematic
Aktuator yang menggunakan tekanan udara sebagai penyebab adanya
gerakan.
Contohnya : Pnuematic slinder.
Gambar 2.23 Pnuematic Silinder
Hidrolik
Aktuator yang menggunakan tekanan cairan sebagai penyebab adanya
gerakan.
Contohnya : dongkrak hidrolik.
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 14
1
0 2.1.3 Sinyal
Sinyal adalah besaran yang berubah dalam waktu dan atau dalam ruang,
dan membawa suatu informasi.
Sinyal ada 2 yaitu : 1) Sinyal Analog
Sinyalnya kontinu terhadap fungsi waktu.Misalnya: sinyal yang keluar
dari sensor analog atau sinyal radio.
Gambar 2.25 Grafik Sinyal Analog
2) Sinyal digital
Sinyal tidak kontinu (diskrit) terhadap fungsi waktu. Biasanya terdiri dari
hanya 2 level sinyal seperti hidup/mati, ya/tidak, true/false, open/closed.
Misalnya: sinyal yang keluar dari microprocessor.
Gambar 2.26 Grafik Sinyal Digital
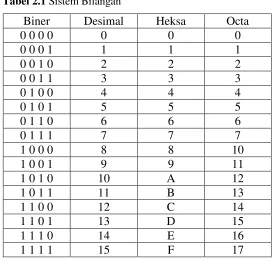
2.1.4 Sistem bilangan
Sistem bilangan adalah suatu cara penulisan angka menggunakan
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 15
Jenis-jenis bilangan : 1) Bilangan biner
Yaitu bilangan yang terdiri dari angka 1 dan 0.
Contoh:
101101 artinya 1 x 25 + 0 x 24 + 1 x 23 + 1 x 22 + 0 x 21 + 1 x 20
50 desimal = 1 x 25 + 1 x 24 + 0 x 23 + 0 x 22 + 1 x 21 + 0 x 20
= 110010 biner
2) Bilangan desimal
Yaitu bilangan yang terdiri dari angka 0,1,2,3,4,5,6,7,8 dan 9.
Contoh :
Yaitu bilangan berbasis 8 yang terdiri dari angka 0,1,2,3,4,5,6 dan 7.
Contoh :
15 artinya 1 x 81 + 5 x 80
50 desimal = 6 x 81 + 2 x 80
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
2.2 Teori Dasar Komponen (Implementasi Ilmu Mekatronika Pada Prototype Pendeteksi Gas Metana Skala Laboratorium Berbasis Mikrokontroler Arduino)
2.2.1 Komponen Elektronika
Dari mata kuliah mekatronika kita ketahui bahwa mekatronika itu
didefinisikan sebagai ilmu yang mempelajari sistem yang berintegrasi
antara elektonik dan mekanika. Dari definisi itu kita ketahui adanya
perpaduan elektronik dengan mekanik yang akan membentuk suatu produk
yang memiliki banyak kelebihan seperti prototype pendeteksi gas metana
skala laboratorium berbasis mikrokontrol dan produk– produk lainnya.
Untuk mempelajari ilmu mekatronika ini kita harus mengetahui
komponen komponen mekanik dan elektronik, untuk proses mekanikanya
kita bisa mengetahui dari mata kuliah lainnya. Dan disini kita akan
membahas komponen – komponen elektronikanya. Diantara komponen–
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 17
2.2.1.1 Resistor
Resistor adalah komponen dasar elektronika yang digunakan
untuk membatasi jumlah arus yang mengalir dalam satu rangkaian.
Sesuai dengan namanya resistor bersifat resistif dan umumnya
terbuat dari bahan karbon.
C. Jenis – Jenis Resistor Berdasarkan Nilai Tahanan 1) Resistor tetap
a. Precision Wire Wound Resistor
Resistor tetap adalah resistor yang mempunyai nilai tahanan
yang tetap. Merupakan tipe resistor yang mempunyai tingkat
keakuratan sangat tinggi yaitu sampai 0,005% dan TCR
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 18
sangat cocok untuk digunakan sebagai aplikasi DC yang
membutuhkan tingkat keakuratan sangat tinggi. Namun jangan
menggunakan tipe ini untuk aplikasi rf (radio frequency) karena
resistor jenis ini mempunyai Q resonant frequency yang rendah.
Contoh aplikasi yang menggunakan resistor ini adalah DC
Measuring Equipment dan Reference Resistor untuk Voltage
Regulators dan Decoding Network.
Gambar 2.28 Precision Wirewound Resistor b. NIST Standard Resistor
NIST (Nasional Institute Standard of Technology) merupakan tipe
resistor dengan keakuratan paling tinggi yaitu 0,001%, TCR yang
rendah dan sangat stabil dibandingkan dengan Precision Wirewound
Resistor. Komponen ini biasanya digunakan sebagai setandar
didalam verifikasi keakuratan dari suatu alat ukur resistive.
Gambar 2.29 NIST Standard Resistor c. Power Wirewound Resistor
Biasanya resistor ini digunakan untuk aplikasi yang
membutuhkan daya yang sangat besar. Resistor jenis ini dapat
mengatasi daya yang sangat besar dibandingkan jenis lain. Karena
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 19
dengan bahan seperti ceramic tube, ceramic rods, anodized
aluminium, fiberglass mandels, dll.
Gambar 2.30 Wire Wound High Power Resistor d. Fuse Resistor
Resistor jenis ini selain berfungsi sebagai penghambat arus juga
sebagai sekering. Resistor jenis ini didesain sedemikian rupa
sehingga bila ada arus yang sangat besar melaluinya, maka
hambatanya menjadi tak terhingga.
Gambar 2.31 Fuse Resistor
e. Carbon FilmResistor
Resistor jenis ini mempunyai karakteristik yang hampir saman
dengan resistor carbon composition, tetapi noise, koefisien
tegangan, koefisien temperatur nilainya lebih rendah. Carbon Film
Resistor dibuat dengan memotong batangan keramik yang panjang
kemudian dicampur dengan material karbon. Frekuensi respon
resistor ini jauh lebih bagus di bandingkan dengan wirewound dan
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 20
Dimana wirewound akan menjadi suatu induktansi ketika
frekuensinya rendah dan akan menjadi kapasitansi apabila
frekuensinya tinggi. Dan untuk carbon composition hanya menjadi
kapasitansi apabila dilalui oleh frekuensi tinggi dan rendah.
Gambar 2.32 Carbon Film Resistor
Gambar 2.33 Struktur Penyusun Carbon Film Resistor
f. Metal Film Resistor
Metal film resistor merupakan pilihan terbaik dari jenis carbon
composition dan carbon film. Karena resistor ini lebih akurat dan
tidak mempunyai koefisien tegangan, noise, dan koefisien temperatur
yang lebih rendah. Tetapi resistor ini tidak sebagus jenis precision
wirewound. Bahan dasar pembuat resistor ini adalah metal dan
keramik, bahan ini mirip dengan bahan untuk membuat carbon film
resistor.
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 21
Gambar 2.35 Struktur Penyusun Metal Carbon Film Resistor g. Foil Resistor
Resistor ini mempunyai karakteristik yang sama dengan resistor
film. Kelebihan utamanya adalah pada tingkat kestabilan yang tinggi,
TCR paling kecil, dan frekuensi respon yang tinggi. Selain kelebihan
terdapat pula kelemahan yaitu nilai resistansi maksimum dari resistor
ini lebih kecil dari pada resistor film. Resistor ini biasanya dipakai
dalam strain gauge, dimana nilai strain dapat diukur berdasarkan
perbahan resistansinya.
Gambar 2.36 Foil Resistor h. Power Film Resistor
Material yang digunakan untuk membuat resistor ini sama dengan
jenis metal film dan carbon film. Namun dengan karakteristik daya
yang tinggi. Power film resistor mempunyai nilai yang lebih tinggi
dan frekuensi respon yang lebih baik dibandingkan power wirewound
resistor, dan biasanya resistor ini mempunyai nilai toleransi yang
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 22
Gambar 2.37 Power Film Resistor 2) Resistor variabel
Resistor variabel adalah resistor yang mempunyai nilai tahanan yang
bisa dirubah-rubah. Resistor jenis ini terbagi atas dua macam yaitu:
a. Potensiometer
Resistor tiga terminal dengan sambungan geser yang membentuk
pembagi tegangan dapat disetel. Jika hanya dua terminal yang
digunakan (salah satu terminal tetap dan terminal geser), potensiometer
berperan sebagai resistor variabel atau Rheostat. Potensiometer biasanya
digunakan untuk mengendalikan peranti elektronik seperti pengendali
suara pada penguat. Potensiometer yang dioperasikan oleh suatu
mekanisme dapat digunakan sebagai transduser, misalnya sebagai
sensor joystick.
Gambar 2.38 Potensiometer Gambar 2.39 Simbol Potensiometer
Beberapa jenis potensiometer :
Potensiometer liniar
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 23
Potensiometer digital b. Trimpot
Resistor yang nilai hambatannya dapat diubah-ubah dengan cara
memutar porosnya dengan menggunakan obeng. Untuk mengetahui nilai
hambatan dari suatu trimpot dapat dilihat dari angka yang tercantum
pada badan trimpot tersebut.
Gambar 2.40 Trimpot Gambar 2.41 Simbol Trimpot
c. NTC dan PTC
NTC merupakan kependekan dari Negative Temperature Coefficient,
yaitu resistor yang nilai resistansinya dapat berubah-ubah sesuai dengan
perubahan temperatur terhadapnya. Jika temperaturnya makin tinggi
maka nilai resistansinya kecil dan sebaliknya bila temperaturnya makin
rendah maka nilai resistansinya makin besar.
PTC merupakan kependekan dari Positive Temperature Coefficient,
yaitu resistor yang nilai resistansinya dapat berubah-ubah sesuai dengan
perubahan temperatur terhadapnya. Jika temperaturnya makin tinggi
maka nilai resistansinya besar dan sebaliknya bila temperaturnya makin
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 24
Gambar 2.42 NTC dan PTC
d. Light Dependent Resistor (LDR)
LDR (Light Dependent Resistor), ialah jenis Resistor yang berubah
hambatannya karena pengaruh cahaya. Bila cahaya gelap nilai
tahanannya semakin besar, sedangkan cahayanya terang nilainya
menjadi semakin kecil.
Gambar 2.43 Light Dependent Resistor (LDR)
Gambar 2.44 Simbol Light Dependent Resistor (LDR)
e. VDR
VDR adalah singkatan dari Voltage Dependent Resistor, yaitu sebuah
resistor tidak tetap yang nilai resistansinya akan berubah tergantung dari
tegangan yang diterimanya. Sifat dari VDR adalah semakin besar
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 25
mengecil, sehingga arus yang melaluinya akan semakin besar. Dengan
adanya sifat tersebut maka VDR akan sangat cocok digunakan sebagai
stabilizer bagi komponen transistor.
Gambar 2.45 VDR D. Cara Menghitung Nilai Hambatan Resistor
1) Multimeter
Gambar 2.46 Multitester Analog
a. Mengukur Nilai Hambatan Sebuah Resistor Tetap
1. Atur Selektor pada posisi Ohmmeter.
2. Pilih skala batas ukur berdasarkan nilai resistor yang akan
diukur.
3. Batas ukur ohmmeter biasanya diawali dengan X (kali). Hasil
penunjukkan jarum nantinya dikalikan dengan angka pengali
sesuai batas ukur
4. Hubungkan kedua probe multimeter pada kedua ujung resistor
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 26
5. Baca hasil ukur pada multimeter, pastikan nilai penunjukan
multimeter sama dengan nilai yang ditunjukkan oleh gelang
warna resistor.
b. Mengukur nilai hambatan sebuah variabel resistor (VR)
1. Atur Selektor pada posisi Ohmmeter.
2. Pilih skala batas ukur berdasarkan nilai (VR) yang akan diukur.
3. Batas ukur ohmmeter biasanya diawali dengan X (kali). Hasil
penunjukkan jarum nantinya dikalikan dengan angka pengali
sesuai batas ukur.
4. Hubungkan kedua probe multimeter pada kedua ujung resistor
boleh terbalik.
5. Sambil membaca hasil ukur pada multimeter, putar/geser posisi
variabel resistor dan pastikan penunjukan jarum multimeter
berubah sesuai dengan putaran VR.
2) pembacaan nilai resistansi berdasarkan warna gelang pada resistor
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 27
Gambar 2.48 Contoh Warna Resistor
Berarti nilai resistor tersebut adalah = 1.000.000 Ohm, toleransi sebesar 5%.
Range hambaran resistor tersebut adalah
R = 10 x 105 ± 5 %
R = 1.000.000 – 50.000 sampai 1.000.000 + 50.000
R = 950.000 sampai 1.050.000 Ohm
E. Jenis – Jenis Resistor Berdasarkan Bentuk Rangkaian
Rangkaian tahanan resistor terbagi atas 2 jenis, yaitu Rangkaian
Tahanan Seri dan Rangkaian Tahanan Paralel.
1) Tahanan seri
Bentuk rangkaian seri:
Gambar 2.49 Rangkaian Seri Resistor
Rumus
𝑅
𝑡𝑜𝑡= 𝑅
1+ 𝑅
22) Tahanan paralel
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 28
Gambar 2.50 Rangkaian Paralel Resistor
Rumus
𝑅
𝑡𝑜𝑡=
𝑅
1𝑅
+ 𝑅
21
𝑅
2Dalam perhitungan tahanan listrik, bentuk rangkaian dapat
digabungkan menjadi tahanan seri – paralel dan dapat juga diilustrasikan
seperti gambar dibawah ini :
Gambar 2.51 Rangkaian Seri Paralel Resistor
Rumus
𝑅
𝑡𝑜𝑡= 𝑅
𝑠𝑒𝑟𝑖+ 𝑅
𝑝𝑎𝑟𝑎𝑙𝑒𝑙𝑅
𝑡𝑜𝑡= 𝑅
1+ 𝑅
2+ [
𝑅
𝑅
3+ 𝑅
4PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 29
2.2.1.2 Kapasitor
Kapasitor adalah alat yang mampu menyimpan
elektron-elektron atau atau tenaga listrik. Kapasitor terdiri dari dua plat
dimana diantara terdapat larutan di elektrik. Kemampuan menyimpan
muatan listrik pada kapasitor disebut dengan kapasitansi atau
kapasitas.
A. Satuan
Satuan dari nilai kapasitansi adalah Farad (F), sesuai dengan
Hukum Ohm:
B. Simbol
Gambar 2.52 Simbol Kapasitor
C. Jenis – Jenis Kapasitor Berdasarkan Nilai Kapasitansi 1) Kapasitor tetap
Kapasitor tetap adalah kapasitor dengan nilai kapasitansi tetap.
Gambar 2.53 Kapasitor Tetap dan Simbolnya
Pada kapasitor umumnya terdapat 3 angka untuk
menyatakan nilai kapasitansi kapasitor. Angka satu dan dua
menunjukkan nilai dan angka ke-3 adalah pengali dengan satuan
piko farad(ρf).
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 30
Contoh : Kapasitor dengan nilai 143
Maka 14.103 ρF = 14.1000ρF = 14ŋF = 0,014µF. Bila kapasitansi
≥ 1µf = kapsitor elektrolit (elco). Kapasitor memiliki polaritas (+,
2-) dan biasa disebut dengan tegangan kerjanya.
2) Kapasitor tidak tetap
Kapasitor tidak tetap adalah kapasitor dengan nilai kapasitansi
yang dapat diubah-ubah. Jenis kapasitor ini terdiri dari :
a. Kapasitor trimmer
Nilai kapasitansi di ubah dengan memutar poros dengan
obeng.
Gambar 2.54 Kapasitor trimmer dan simbolnya
b. Variable capasitor (varco)
Nilai kapsitansi yang di ubah dengan memutar poros yang
tersedia.
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 31
D.Jenis - Jenis Kapasitor Berdasarkan Bahan Dielektriknya
Kapasitor juga dapat dibedakan berdasarkan bahan yang
digunakan sebagai lapisan diantara lempeng-lempeng logam yang
disebut dielektrium. Dielektrium tersebut dapat berupa keramik,
mika, milar, kertas, polyester ataupun film. Pada umumnya kapasitor
yang terbuat dari bahan diatas nilainya kurang dari 1mikrofarad
(1mF).
1) Kapasitor Elektrolit merupakan kapasitor yang bahan
dielekriknya dari elektrolit.
Gambar 2.56 Kapasitor Elektrolit
2) Kapasitor Tantalun merupakan kapasitor yang bahan dielekriknya
dari tantanun.
Gambar 2.57 Kapasitor Tantalun
3) Kapasitor Polister film merupakan kapasitor yang bahan
dielekriknya dari polister film.
Gambar 2.58 Kapasitor Polyester Film
4) Kapasitor Poliprolyene merupakan kapasitor yang bahan
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 32
Gambar 2.59 Kapasitor Poliprolyene
5) Kapasitor Kertas merupakan kapasitor yang bahan dielekriknya dari
kertas.
Gambar 2.60 Kapasitor Kertas
6)Kapasitor Mica merupakan kapasitor yang bahan dielekriknya dari
mica.
Gambar 2.61 Kapasaitor Mica
7)Kapasitor Keramik merupakan kapasitor yang bahan dielekriknya
dari keramik.
Gambar 2.62 Kapasitor Keramik
8)Kapasitor Epoxy merupakan kapasitor yang bahan dielekriknya dari
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 33
Gambar 2.63 Kapasitor Epoxy
9)Kapasitor Variable merupakan kapasitor yang bahan dielekriknya
dari variabel tertentu.
Gambar 2.64 Kapasitor Variable
D. Penggunaan Alat Ukur Pada Kapasitor
1) Mengukur Kapasitor Non Polar Dengan Multitester
Sebenarnya cara ini kurang pas untuk cek elco, dan cara yg tepat
mengukur elco adalah dengan Capacitance Meter, dan dia akan
menunjukkan kapasitas sebenarnya. Tapi cara ini juga lumayan cukup
membantu, berikut caranya :
Putar batas ukur pada Ohmmeter X1/X10 untul elco yang
ukurannya besar dan X100 / X1K untuk elco yang ukurannya kecil.
Hubungkan probe ke masing – masing kaki elco (bolak balik sama
saja). Lihat penunjukan jarum pada papan skala.
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 34
Kesimpulan Hasil Pengukuran:
1. Jarum menunjuk angka dan kembali ke tempat semula : elco balik
2. Jarum angka menunjuk angka dan tidak kembali ke tempat semula :
elco bocor
3. Jarum tidak bergerak sama sekali : elco putus
4. Jarum menunjuk angka nol : elco short
2) Mengukur Kapasitor Non Polar Dengan Multitester
Sebenarnya cara ini juga kurang pas untuk cek kapasitor, dan
cara yg tepat mengukur elco adalah dengan Capacitance Meter.
Putar batas ukur pada Ohmmeter X1K / X10K
Hubungkan probe ke masing-masing kaki kapasitor (bolak balik sama
saja) Lihat penunjukan jarum pada papan skala.
Kesimpulan Hasil Pengukuran
1. Jarum menunjuk angka dan kembali ke tempat semula : kapasitor baik
2. Jarum menunjuk angka dan tidak kembali ke tempat semula : kapasitor
bocor
3. Jarum tidak bergerak sama sekali : kapasitor putus
4. Jarum menunjuk angka nol : kapasitor short
2.2.1.3 Dioda
Dioda adalah piranti semikonduktor dengan bahan tipe-n yang
menyediakan elektron-elektron bebas dan bahan tipe-p yang disatukan
(P-N junction). Dioda merupakan suatu piranti dua elektroda dengan
arah arus yang tertentu, dapat juga dikatakan dioda bekerja sebagai
penghantar bila tegangan listrik diberikan dalam arah tertentu tetapi
dioda akan bekerja sebagai isolator bila tegangan yang diberikan
dalam arah berlawanan dari pergerakan elektron pembentuknya.
Kristal P-N sebagai penyusun dioda akan bekerja jika arus
didalamnya hanya dapat mengalir dalam satu arah dan tidak
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 35
(forward bias). Pada dioda, kita mengenal potensial barrier yaitu beda
potensial pada persambungan. Beda potensial ini menjadi cukup besar
untuk menghalangi proses penyebaran difusi selanjutnya dari
elektron-elektron bebas. Pada suhu ruangan potensial barrier bekerja sekitar 0,7
Volt untuk Silikon dan 0,3 Volt untuk Germanium.
A. Simbol
Gambar 2.66 Simbol Dioda
B. Jenis – Jenis Dioda
1) Dioda Penyearah/Hubungan ( Rectifier)
Dioda penyearah adalah jenis dioda yang terbuat dari bahan
Silikon yang berfungsi sebagai penyearah tegangan / arus dari arus
bolak-balik (ac) ke arus searah (dc) atau mengubah arus ac
menjadi dc. Secara umum dioda ini disimbolnya.
Gambar 2.67 Dioda dan Simbol Dioda Rectifier 2) Dioda zener
Dioda Zener merupakan dioda junction P dan N yang terbuat
dari bahan dasar silikon. Dioda ini dikenal juga sebagai Voltage
Regulation Diode yang bekerja pada daerah reverse (kuadran III).
Potensial dioda zener berkisar mulai 2,4 sampai 200 volt dengan
disipasi daya dari ¼ hingga 50 watt
.
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 36
3) Dioda Emisi Cahaya (Light Emiting Diode)
Dioda emisi cahaya atau dikenal dengan singkatan LED
merupakan Solid State Lamp yang merupakan piranti elektronik
gabungan antara elektronik dengan optik, sehingga dikategorikan
pada keluarga Optoelectronic. Sedangkan elektroda-elektrodanya
sama seperti dioda lainnya, yaitu anoda (+) dan Katoda (-). Ada
tiga kategori umum penggunaan LED, yaitu : - Sebagai lampu
indikator, - Untuk transmisi sinyal cahaya yang dimodulasikan
dalam suatu jarak tertentu, - Sebagai penggandeng rangkaian
elektronik yang terisolir secara total. Simbol, bangun fisiknya dan
konstruksinya diperlihatkan pada gambar berikut.
Gambar 2.69 Gambar dan Simbol LED
Bahan dasar yang digunakan dalam pembuatan LED
adalah bahan Galium Arsenida (GaAs) atau Galium Arsenida
Phospida (GaAsP) atau juga Galium Phospida (GaP),
bahan-bahan ini memancarkan cahaya dengan warna yang berbeda-beda.
Bahan GaAs memancarkan cahaya infra-merah, Bahan GaAsP
memancarkan cahaya merah atau kuning, sedangkan bahan GaP
memancarkan cahaya merah atau hijau.
Seperti halnya piranti elektronik lainnya, LED mempunyai
nilai besaran terbatas dimana tegangan majunya dibedakan atas
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 37
Gambar 2.70 Warna Dioda Tabel 2.2 Warna Led Dan Tegangannya
Warna Tegangan Maju
pengujian LED ini mudah, cukup dengan menggabungkan dengan
sumber tegangan dc kecil saja atau dengan ohmmeter dengan
polaritas yang sesuai dengan elektrodanya.
4) Dioda Cahaya (Photo-Diode)
Secara umum dioda-cahaya ini mirip dengan PN-Junction,
perbedaannya terletak pada persambungan yang diberi celah agar
cahaya dapat masuk padanya.
Dioda cahaya ini bekerja pada daerah reverse, jadi hanya
arus bocor saja yang melewatinya. Dalam keadaan gelap, arus
yang mengalir sekitar 10 A untuk dioda cahaya dengan bahan
dasar germanium dan 1A untuk bahan silikon. Kuat cahaya dan
temperature keliling dapat menaikkan arus bocor tersebut karena
dapat mengubah nilai resistansinya dimana semakin kuat cahaya
yang menyinari semakin kecil nilai resistansi dioda cahaya
tersebut.
Penggunaan dioda cahaya diantaranya adalah sebagai
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 38
dimana pita berlubang tersebut terletak diantara sumber cahaya
dan dioda cahaya. Jika setiap lubang pita itu melewati antara tadi,
maka cahaya yang memasuki lubang tersebut akan diterima oleh
dioda cahaya dan diubah dalam bentuk signal listrik. Sedangkan
penggunaan lainnya adalah dalam alat pengukur kuat cahaya (Lux
-Meter), dimana dalam keadaan gelap resistansi dioda cahaya ini
tinggi sedangkan jika disinari cahaya akan berubah rendah. Selain
itu banyak juga dioda cahaya ini digunakan sebagai sensor sistem
pengaman (security) misal dalam penggunaan alarm.
Gambar 2.71 Gambar dan Simbol Dioda Cahaya (Photodiode)
5) Dioda Varactor
Dioda Varactor disebut juga sebagai dioda kapasitas yang
sifatnya mempunyai kapasitas yang berubah-ubah jika diberikan
tegangan. Dioda ini bekerja didaerah reverse mirip dioda Zener.
Bahan dasar pembuatan dioda varactor ini adalah silikon dimana
dioda ini sifat kapasitansinya tergantung pada tegangan yang
diberikan padanya. Jika tegangan tegangannya semakin naik,
kapasitasnya akan turun. Dioda varikap banyak digunakan pada
pesawat penerima radio dan televisi di bagian pengaturan suara
(Audio).
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 39
Apresimasi dioda ideal membuang semuanya, kecuali
dasar dioda. Dioda akan mengenduksi dengan baik pada arah
forward dan buruk pada arah reverse, jika disimpulkan secara
ideal, dioda berlaku seperti konduktor sempurna ( tegangan nol ),
jika dibiaskan forward dan seperti isolator sempurna ( arus nol ).
Dalam istilah, rangkaian dioda ideal berlaku seperti saklar
otomatis, jika arus konventional berusaha mengalir searah anak
panah dioda, saklar tertutup, jika arus konventional berusaha
mengalir ke arah sebaliknya, saklar terbuka. Hal ini dapat
dijelaskan dalam gambar berikut:
Gambar 2.73 Gambar Aliran Arus Dioda
Seperti kebanyakan, komponan dengan kawat penghubung
dioda mempunyai kapasitansi besar yang mempengaruhi kerja
pada frekuensi tinggi, kapasitansi luar ini biasanya lebih kecil dari
1 pf, yang lebih penting dari kapasitansi luar ini adalah kapasitansi
dalam jungtion dioda. Kapasitansi dalam ini disebut juga
kapasitansi peralihan Ct. Kata peralihan disini menunjukkan
peralihan dari bahan tipa P ke tipa N. Preparasi kepasitansi
peralihan dikenal juga sebagai kapasitansi lapisan pengosongan,
kapasitansi barier dan kapasitansi junction.
Pada dioda dibias forward, elektron pita konduksi melewati
junction dan jatuh ke dalam hole. Pada saat elektron jatuh dari pita
konduksi ke pita valensi, maka memancarkan energi pada dioda
penyearah, energi dipancarkan/dikeluarkan sebagai panas, tetapi
pada LED energi dipancarkan sebagai cahaya.
Dengan menggunakan unsur-unsur seperti
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 40
memancarkan warna merah, kuning, dan infra merah. LED yang
menghasilkan pancaran yang kelihatan dapat berguna pada display
peralatan. mesin hitung jam digital dan lain-lain. LED infra merah
dapat digunakan dalam sistem tanda cahaya pencuri dan ruang
lingkup lain yang membutuhkan pancaran yang tidak kelihatan.
Dioda zener penggunaanya sangat luas, dioda silikon
dioptimumkan untuk bekerja pada daerah break down. Dioda
zener adalah tulang punggung regulator tegangan.
C. Mengukur Dioda Dengan Multitester Caranya sebagai berikut:
1. Putar batas ukur pada Ohmmeter X10 / X100
Gambar 2.74 Penggunaan Multitester pada Dioda
2. Susun rangkaian sebagai berikut:
probe merah => katoda, probe hitam => anoda => Jarum bergerak
bukan nol.
3. Kemudian posisi dibalik:
probe merah => anoda, probe hitam => katoda,
Jarum tdk bergerak berarti dioda dalam kondisi BAIK.
4. Tukar susun rangkaian sebagai berikut
probe merah => katoda, probe hitam => anoda => Jarum bergerak
atau menunjuk nol.
5. Kemudian Posisi Dibalik:
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 41
Jarum bergerak atau menunjuk nol berarti dioda dalam kondisi
rusak / short.
2.2.1.4 IC (H-Bridge L298)
Berikut ini adalah penerapan dari L298 ke driver motor dan
beban induksi sampai dengan 4A berturut-turut. Awalnya L298
mengandung 2 saluran yang terpisah, masing-masing cocok dengan
beban 2A. Menghubungan keduanya dengan parallel secara skematik
membuat sebuah driver 4A.
Gambar 2.75 Rangkaian Minimum IC H Bridge L298
Kedua kabel penghubung W1 dan W2 digunakan untuk
mengontrol arah pada motor berdasarkan tabel berikut :
Tabel 2.3. Sinyal Penghubung W1 dan W2 pada H Bridge L298 Signal on W1 and W2 Result / Action
10 Motor turns clockwise
01 Motor turns anticlockwise
11 Motor breaks
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 42
Kedua transistor Q1 dan Q2 bertindak sebagai gerbang OR
untuk L298 jika kedua sinyal W1 dan W2 tinggi. Jika kedua W1 dan
W2 rendah (logika 0), maka driver akan lumpuh dan menghasilkan
keluaran impedansi tinggi, yang menyebabkan motor akhirnya bisa
bergerak bebas
C1 dan C2 sebesar 10 nF merupakan kapasitor decoupling. D1
ke D4 merupakan flyback diodes. Arus maju mereka harus sesuai
dengan beban yang diharapkan. Kedua beban dari motor terhubung
langsung ke J1. Sirkuit bisa hidupkan dengan tenaga 9V sampai 35V.
2.2.1.5 Baterai NiMH
Nickel Metal Hydride, atau NiMH, merupakan jenis baterai
isi ulang mirip dengan baterai NiCad, tetapi dibuat dengan komponen
yang lebih terjangkau dan ramah lingkungan. Baterai NiMH semakin
populer, terutama untuk digunakan dalam berbagai barang elektronik
karena jangka hidup yang relatif lama dengan harga relatif terjangkau.
Baterai NiMH sering dianggap alternatif untuk baterai
lithium ion. Sementara baterai lithium ion lebih tahan lama, namun
harga dan biaya pemeliharaan yang relatif tinggi membuat NiMH
menjadi pilihan masuk akal untuk berbagai jenis barang elektronik.
Dengan pengecualian beberapa item seperti telepon seluler dan laptop,
menggunakan baterai NiMH biasanya merupakan pilihan paling
sesuai. Baterai NiMH menggunakan ion hidrogen untuk menyimpan
energi, tidak seperti baterai lithium ion yang menggunakan ion
lithium.
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 43
2.2.1.6 Modul Bluetooth MC-05
Modul bluetooth seri HC memiliki banyak jenis atau varian,
yang secara garis besar terbagi menjadi dua yaitu jenis industrial
series yaitu HC-03 dan HC-04 serta civil series yaitu 05 dan
HC-06. Modul Bluetooth serial, yang selanjutnya disebut dengan modul
BT saja digunakan untuk mengirimkan data serial TTL via bluetooth.
Modul BT ini terdiri dari dua jenis yaitu Master dan Slave.
Seri modul BT HC bisa dikenali dari nomor serinya, jika nomer
serinya genap maka modul BT tersebut sudah diset oleh pabrik,
bekerja sebagai slave atau master dan tidak dapat diubah mode
kerjanya, contoh adalah HC-06-S. Modul BT ini akan bekerja sebagai
BT Slave dan tidak bisa diubah menjadi Master, demikian juga
sebaliknya, Sedangkan modul BT HC dengan nomer seri ganjil,
misalkan HC-05, kondisi default biasanya diset sebagai Slave mode,
tetapi pengguna bisa mengubahnya menjadi mode Master dengan AT
Command tertentu.
Penggunaan utama dari modul BT ini adalah menggantikan
komunikasi serial via kabel, sebagai contoh:
1. Jika akan menghubungkan dua sistem mikrokontroler agar bisa
berkomunikasi via serial port maka dipasang sebuah modul BT
Master pada satu sistem dan modul BT Slave pada sistem lainnya.
Komunikasi dapat langsung dilakukan setelah kedua modul
melakukan pairing. Koneksi via bluetooth ini menyerupai
komunikasi serial biasa, yaitu adanya pin TXD dan RXD.
2. Jika sistem mikrokontroler dipasangi modul BT Slave maka ia
dapat berkomunikasi dengan perangkat lain semisal PC yang
dilengkapi adapter BT ataupun dengan perangkat ponsel,
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 44
3. Saat ini banyak perangkat seperti printer, GPS modul dan lain-lain
yang bekerja menggunakan media bluetooth, tentunya sistem
mikrokontroler yang dilengkapi dengan BT Master dapat bekerja
mengakses device-device tersebut
Pemakaian module BT pada sistem komunikasi baik antar dua
sistem mikrokontrol maupun antara suatu sistem ke device lain tidak
perlu menggunakan driver, tetapi komunikasi dapat terjadi dengan dua
syarat yaitu :
1. Komunikasi terjadi antara modul BT Master dan BT Slave
Komunikasi tidak akan pernah terjadi jika kedua modul
sama-sama Master atau sama-sama-sama-sama Slave, karena tidak akan pernah
pairing diantara keduanya
2. Password yang dimasukkan cocok
Modul BT yang banyak beredar di sini adalah modul HC-06
atau sejenisnya dan modul HC-05 dan sejenisnya. Modul HC-05
memiliki kemampuan lebih yaitu bisa diubah mode kerjanya
menjadi Master atau Slave serta diakses dengan lebih banyak AT
Command, modul ini sangat direkomendasikan, terutama dengan
flexibilitasnya dalam pemilihan mode kerjanya.
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 45
2.2.2 Sensor (Sensor gas metana MQ-4)
MQ-4 adalah komponen elektronika untuk mendeteksi kadar
gas alam terkompresi / CNG (Compressed Natural Gas). Penyusun
utamanya mengandung gas metana (CH4) yang merupakan bentuk
paling sederhana dari hidrokarbon. Walaupun tidak bersifat racun, gas
metana dapat berbahaya karena mudah terbakar (combusive /
flammable gas). Gas ini tdak berbau dan tidak berwarna,
menjadikannya sulit untuk dideteksi secara langsung oleh manusia.
Dengan menggunakan MQ-4 Methane CNG Sensor Module ini,
Anda dapat mendeteksi kadar gas metana dalam udara dengan
menyambungkan sensor ini ke mikrokontroler / development board
semacam Arduino. Dari situ Anda bisa membuat program untuk
menentukan aksi berdasarkan data yang terbaca, misalnya menyalakan
alarm saat kadar gas metana ini mencapai ambang batas tertentu yang
membahayakan, atau sekedar menampilkan kadar ppm (parts per
million) gas tersebut di layar tampilan.
Sensor MQ-4 merupakan sensor yang sangat sensitif terhadap
CNG dan dapat mendeteksi konsentrat gas alam di udara mulai dari
200 ppm hingga 10.000 ppm. Keluaran sensor ini berupa resistansi
analog yang dengan mudah dapat dikonversi menjadi tegangan dengan
menambahkan satu resistor biasa. Dengan mengkonversi impedansi ini
menjadi tegangan, hasil bacaan sensor dapat dibaca oleh pin ADC
(Analog to Digital Converter) pada mikrokontroler.
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 46
2.2.3 Kontroller (MicrocontrollerArduino Uno)
Arduino Uno adalah board mikrokontroler berbasis ATmega328.
Uno memiliki 14 pin digital input / output (dimana 6 dapat digunakan
sebagai output PWM), 6 input analog, resonator keramik 16 MHz,
koneksi USB, jack listrik, header ICSP, dan tombol reset. Uno dibangun
berdasarkan apa yang diperlukan untuk mendukung
mikrokontroler,sumber daya bisa menggunakan power USB (jika
terhubung ke komputer dengan kabel USB) dan juga dengan adaptor
atau baterai.
Arduino Uno berbeda dari semua papan sebelumnya dalam hal
tidak menggunakan FTDI chip driver USB-to-serial. Sebaliknya, fitur
Atmega16U2 (Atmega8U2 sampai versi R2) diprogram sebagai
konverter USB-to-serial. Revisi 2 dari Uno memiliki resistor pulling
8U2 HWB yang terhubung ke tanah, sehingga lebih mudah untuk
menggunakan mode DFU.
Papan Arduino Rev 3 memiliki fitur baru seperti berikut:
1. Pertama adalah pinout: ada penambahan pin SDA dan SCL yang dekat
dengan pin AREF dan dua pin baru lainnya ditempatkan dekat dengan
pin RESET, IOREF yang memungkinkan shield untuk beradaptasi
dengan tegangan yang disediakan dari papan / board. Di masa depan,
shield akan kompatibel dengan kedua papan yang menggunakan AVR,
yang beroperasi dengan 5V dan dengan Arduino yang beroperasi 3.3V.
Kedua adalah pin tidak terhubung, yang dicadangkan untuk tujuan masa
depan.
2.Reset sirkuit yang sangat kuat
3.Atmega16U2 menggantikan Atmega8U2
Uno dalam bahasa Italia berarti satu, alasan diberi nama tersebut
adalah untuk menandai peluncuran Arduino 1.0. Uno dan versi 1.0 akan
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 47
Gambar 2.79 Arduino Uno
2.2.4 Aktuator
Aktuator adalah suatu komponen atau alat sebagai pengeksekusi
sinyal yang diterima dari kontroller atau menghasilkan sebuah perubahan
secara fisik.
atau percepatan yang tetap untuk kisaran kecepatan yang luas.
Motor DC yang memiliki tiga komponen utama:
1. Kutub medan
Secara sederhana digambarkan bahwa interaksi dua
kutub magnet akan menyebabkan perputaran pada motor DC.
Motor DC memiliki kutub medan yang stasioner dan dinamo
yang menggerakan bearing pada ruang diantara kutub medan.
motor DC sederhana memiliki dua kutub medan: kutub utara
dan kutub selatan. Garis magnetik energi membesar
melintasi bukaan diantara kutub-kutub dari utara ke selatan.
untuk motor yang lebih besar atau lebih komplek
terdapat satu atau lebih elektromagnet. elektromagnet
menerima listrik dari sumber daya dari luar sebagai penyedia
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 48
2. Dinamo.
Bila arus masuk menuju dinamo, maka arus ini akan
menjadi elektromagnet. dinamo yang berbentuk silinder,
dihubungkan ke as penggerak untuk menggerakan beban.
Untuk kasus motor DC yang kecil, dinamo berputar dalam
medan magnet yang dibentuk oleh kutub-kutub, sampai kutub
utara dan selatan magnet berganti lokasi. Jika hal ini terjadi,
arusnya berbalik untuk merubah kutub-kutub utara dan selatan
dinamo.
3. Commutator.
Komponen ini terutama ditemukan dalam motor
DC. Kegunaannya adalah untuk membalikan arah arus listrik
dalam dinamo. Commutator juga membantu dalam transmisi arus
antara dinamo dan sumber daya.
Gambar 2.80 Motor DC
2.2.4.2 Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara. Pada
dasarnya prinsip kerja buzzer hampir sama dengan loud speaker, jadi buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga
menjadi elektromagnet, kumparan tadi akan tertarik ke dalam
atau keluar, tergantung dari arah arus dan polaritas magnetnya,
karena kumparan dipasang pada diafragma maka setiap gerakan
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 49
sehingga membuat udara bergetar yang akan menghasilkan suara.
Buzzer biasa digunakan sebagai indikator bahwa proses telah
selesai atau terjadi suatu kesalahan pada sebuah alat (alarm).
Gambar 2.81 Buzzer 2.2.5 Interface (HP Arduino)
Salah satu motifasi utama dalam menambahkan asynchronous CDC
support code ke rev 2.0 USB Host Library adalah untuk bisa
menggunakan Arduino melalui Handphone. Seperti pertukaran data
melalui SMS, mengambil foto atau melakukan koneksi ke internet. HP
bekas yang tidak terlalu mahal juga bisa menggunakan fitur ini. Juga m2m
(machine to machine) SIM card yang dimulai dari harga $4/$6, beberapa
bahkan bisa mendapatkan sms gratis. Semua itu membuat HP menjadi alat
komunikasi yang menarik untuk menyalurkan hobi.
HP Modern (<10 tahun) memiliki implementasi chip interfaceGSM
standard dan bisa di akses melalui data port. Model HP yang lebih lama
mengimplementasikan TTL interface level sikron yang biasa disebut
custom kabel data USB, yang mana hanya milik konektor pada salah satu
ujung, konektor USB standar pada ujung yang lain, dan chip konverter
USB serial (hampir selalu Prolific PL2303) di antara mereka. HP baru
memiliki USB-serial konverter. Motorola ponsel biasanya mengakhiri port
data pada konektor mini-USB standar, orang lain, seperti Samsung dan
Sony Ericsson, gunakan kabel milik. USB serial converter di ponsel ini
memiliki tipe standar CDC ACM.
Banyak fungsi dari HP yang bisa di akses melalui AT commands,
sama dengan perintah (command) yang digunakan untuk mengontrol
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 50
TS 07.07 (dilihat dari versi terakhir, yaitu 7.8.0). Ketika proses
pembuatan HP, AT command juga telah dimasukan kedalam HP itu
sendiri. Dalam pengaplikasiannya, AT command biasanya di tulis
dengan huruf besar, tetapi kebanyakan HP bisa menerima huruf kecil.
Perintah harus diikuti dengan CR.LF (biasanya tombol Enter). Jika
perintah diterima, maka akan muncul OK bersamaan dengan responnya.
Jika perintah tidak dikenali, makan akan muncul ERROR. Beberapa
perintah akan diterima di HP jenis tertentu dan bisa ditolak di HP jenis
lainnya.
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 51
BAB III
METODOLOGI
3.1 FlowChart Penulisan Laporan
Gambar 3.1FlowChart Penulisan Laporan Pembuatan Laporan Akhir
Praktikum MEKATRONIKA
Asistensi Laporan
Laporan akhir praktikum MEKATRONIKA
Studi Literatur Mulai
Selesai Belum ACC
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 52
3.2 Prinsip Kerja Alat 3.2.1 Skema Alat
PRAKTIKUM 2014/2015 LABORATORIUM MEKATRONIKA
Kelompok 14 53
3.2.2 Flowchart Pembuatan Alat
Gambar 3.3Flowchart Pembuatan Alat
Pengumpulan Informasi (Studi Literatur)
Perumusan Masalah Yang ditemui dilapangan
Perancangan desain alat yang akan dibuat
Perancangan sistem Otomasi dari alat