Studi Pengaturan Kecepatan Motor Dc Shunt Dengan Metode Ward Leonard (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU)
Teks penuh
Gambar
![Gambar 2.2 Konstruksi motor arus searah bagian rotor [4]](https://thumb-ap.123doks.com/thumbv2/123dok/2015538.1190390/2.595.203.426.172.316/gambar-konstruksi-motor-arus-searah-bagian-rotor.webp)
![Gambar 2.3 Aturan Tangan Kiri untuk Prinsip Kerja Motor DC [1]](https://thumb-ap.123doks.com/thumbv2/123dok/2015538.1190390/6.595.199.457.364.509/gambar-aturan-tangan-kiri-untuk-prinsip-kerja-motor.webp)
![gambar 2.4 (a), maka kumparan akan berputar searah jarum jam [7].](https://thumb-ap.123doks.com/thumbv2/123dok/2015538.1190390/7.595.128.456.394.533/gambar-maka-kumparan-akan-berputar-searah-jarum-jam.webp)
![Gambar 2.5 Motor Arus Searah Penguatan Bebas [5]](https://thumb-ap.123doks.com/thumbv2/123dok/2015538.1190390/10.595.141.484.153.297/gambar-motor-arus-searah-penguatan-bebas.webp)
![Gambar 2.6 Motor Arus Searah Penguatan Seri [5]](https://thumb-ap.123doks.com/thumbv2/123dok/2015538.1190390/11.595.208.417.470.612/gambar-motor-arus-searah-penguatan-seri.webp)
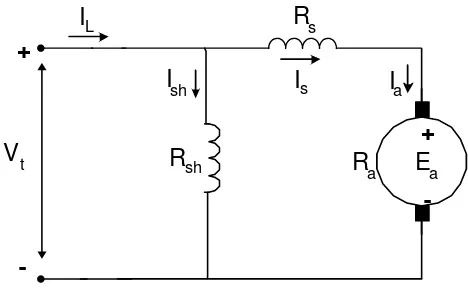
![Gambar 2.7 Motor Arus Searah Penguatan Shunt [5]](https://thumb-ap.123doks.com/thumbv2/123dok/2015538.1190390/12.595.198.427.290.443/gambar-motor-arus-searah-penguatan-shunt.webp)
![Gambar 2.8 Motor Arus Searah Penguatan Kompon Pendek [5]](https://thumb-ap.123doks.com/thumbv2/123dok/2015538.1190390/13.595.197.429.329.473/gambar-motor-arus-searah-penguatan-kompon-pendek.webp)
Dokumen terkait
posisi sikat dan penambahan kutub bantu terhadap efisiensi dan torsi motor arus..
Prinsip kerja motor arus searah berdasarkan pada penghantar yang membawa arus, ditempatkan dalam suatu medan magnet maka pengantar tersebut akan mengalami gaya, gaya menimbulkan
Inti jangkar yang umumnya digunakan dalam motor arus searah adalah berbentuk silinder yang diberi alur-alur pada permukaannya untuk tempat melilitkan kumparan jangkar tempat
Jika mesin arus searah dari Gambar 9(c) bekerja sebagai motor, maka jangkar haruslah berputar berlawanan arah dengan jarum jam, karena kutub U dan S dari medan utama
Sedangkan yang termasuk rotor adalah jangkar, kumparan jangkar dan komutator.. Secara umum konstruksi generator arus searah adalah seperti
jangkar (Ia), sehingga pada konduktor kumparan jangkar timbul fluksi magnet.. yang
Untuk memenuhi semuannya ini, maka diperlukan motor arus searah yang memiliki efisiensi dan torsi tinggi.Pengaturan posisi sikat dan penambahan kutub bantu
Jika arus jangkar (I) tegak lurus dengan arah induksi magnetik (B) maka besar gaya yang dihasilkan oleh arus yang mengalir pada konduktor jangkar yang ditempatkan dalam suatu
