TUGAS AKHIR
PERBANDINGAN KECEPATAN MOTOR-DC SHUNT
PADA LABORATORIUM KONVERSI ENERGI LISTRIK
DENGAN SIMULINK MATLAB
Diajukan untuk memenuhi salah satu persyaratan dalam menyelesaikan pendidikan sarjana ( S-1 ) pada
Departeman Teknik Elektro
Oleh
TONNY MICHAEL PASARIBU
NIM : 060402003
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
Lembaran pengesahan
PERBANDINGAN KECEPATAN MOTOR-DC SHUNT PADA
LABORATORIUM KONVERSI ENERGI LISTRIK DENGAN
SIMULINK MATLAB
Oleh :
Tonny Michael Pasaribu 060402003
Tugas akhir ini diajukan untuk melengkapi salah satu syarat untuk memperoleh gelar sarjana teknik elektro
Disetujui oleh : Dosen Pembimbing
Ir.Syarifuddin Siregar NIP. 19461208 19760 31 002
Diketahui oleh :
Ketua Departemen Teknik Elektro Ft USU,
Ir. Surya Tarmizi Kasim, M.Si NIP. 19540531 19860 11 002
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
PERBANDINGAN KECEPATAN MOTOR-DC SHUNT
PADA LABORATORIUM KONVERSI ENERGI LISTRIK
DENGAN SIMULINK MATLAB
Oleh :
Tonny Michael Pasaribu 060402003
Tugas akhir ini diajukan untuk melengkapi salah satu syarat untuk memperoleh gelar sarjana teknik
Pada
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
Sidang pada tanggal di depan penguji :
1. Ir. Sumantri Zulkarnaen : Ketua penguji : ... 2. Ir. Satria Ginting : Anggota Penguji : ... 3. Ir. H.Rahman Hasibuan : Anggota Penguji : ...
Disetujui oleh : Pembimbing Tugas Akhir,
Ir.Syarifuddin Siregar NIP. 19461208 19760 31 002
Diketahui oleh :
Ketua Departemen Teknik Elektro Ft USU,
KATA PENGANTAR
Segala Puji dan syukur Penulis panjatkan kepada Allah Tri Tunggal yang maha rahim (Bapa, Putra dan Roh Kudus) atas berkat dan rahmat-Nya sehingga Tugas Akhir ini dapat diselesaikan dengan baik.
Tugas Akhir ini merupakan salah satu syarat bagi penulis untuk memperoleh gelar Sarjana Teknik Elektro Fakultas Teknik, Universitas Sumatera Utara, Medan.
Selama masa kuliah sampai masa penyelesaian Tugas Akhir ini, penulis banyak memperoleh bimbingan dan bantuan dari berbagai pihak. Untuk itu dengan penuh ketulusan hati, penulis mengucapkan terimakasih yang sebesar-besarnya kepada :
1. Kedua Orangtua yang saya banggakan J.Pasaribu dan M.Sumbayak serta Ketiga abang saya Efendi Pasaribu.SP, Ronald Pasaribu.SE, dan Jolinson Pasaribu atas dukungan moril dan spiritual.
2. My Only Sweetheart, “Irene Margareth Hutagaol.SE” I hope soon u’ll be mine.
3. Bapak Ir.Syarifuddin Siregar, selaku dosen pembimbing penulis yang telah banyak membantu penulis dalam menyelesaikan Tugas Akhir ini.
4. Ibu Windalina Syafiar, selaku Dosen Wali Penulis.
5. Bapak Ir.Surya Tarmizi Kasim, M.Si, selaku Ketua Departemen Teknik Elektro FT- USU.
6. Teman – teman yang meluangkan waktunya membantu penulis Tua, Rozi,Igbal, bg Zogza, dan rekan – rekan asisten laboratorium konversi. 7. Semua rekan-rekan di Elektro USU terutama Elektro angkatan ’06 (Frans,
Penulis sangat mengharapkan tanggapan dan kritikan yang membangun dari berbagai pihak agar dapat dipergunakan oleh penulis untuk meningkatkan kualitas diri.
Medan, Juni 2011 Penulis,
Abstrak
Tugas akhir ini bertujuan, Untuk membandingkan kecepatan motor arus searah yang terdapat pada laboratorium konversi energi dengan kecepatan motor dengan menggunakan simulink matlab (sesuai dengan karakteristik mesin yang ada di laboratorium konversi energi). Dalam membuat simulink ini, peralatan yang ada di laboratorium konversi energi listrik FT USU, dijadikan acuan pembanding kelayakan dari simulink yang dibuat.
Untuk perbandingan kecepatan motor arus searah ini, diambil motor arus searah penguatan shunt sebagai acuan. Dalam pengaturannya kita gunakan rheostat yang dipasangkan secara seri dengan tahanan jangkar dan tahanan medan, sedangkan sebagai beban digunakan generator arus searah berpenguatan bebas dengan beban konstan.
Dari hasil percobaan yang dilakukan pada laboratorium dibandingkan dengan penggunaan simulink matlab, simulasi ini layak untuk dijadikan sebagai acuan bagi yang membutuhkan.
DAFTAR ISI
HAL
ABSTRAK ... i
DAFTAR ISI ... ii
DAFTAR GAMBAR ... vi
DAFTAR TABEL ... ix
BAB I. PENDAHULUAN ... 1
I.1. Latar belakang masalah ... 1
I.2. Tujuan penulisan ... 3
I.3. Batasan masalah ... 3
I.4. Metode penulisan………... 3
I.5. Sistematika penulisan ... 4
BAB II. MOTOR DC ... ..6
II.1. Umum ... ..6
II.2. Konstruksi motor-DC... ..7
II.3. Prinsip kerja motor-DC ... 15
II.4. Jenis motor-DC ... .22
II.4.1. Motor arus searah penguatan bebas.. ... .23
II.4.2. Motor arus searah penguatan sendiri. ... .24
II.4.2.2 Motor arus searah penguatan shunt... .…25
II.4.2.3 Motor arus searah kompon panjang………..…...26
II.4.2.4 Motor arus searah kompon pendek...…………...………...…...28
BAB III. PENGATURAN KECEPATAN MOTOR DC ... 30
III.1. Umum ... 30
III.1.1 Pengaturan kecepatan motor arus searah ... 30
III.1.2 Pengaturan arah putaran motor arus searah ... 31
III.1.3.Pengereman dan penghentian motor arus searah ... 32
III.2. Jenis pengaturan kecepatan motor DC ... 32
III.2.1 Pengaturan sumber tegangan... 33
III.2.2 Pengaturan tahanan jangkar ... 35
III.2.3 Pengaturan fluksi magnetik ... 36
BAB IV. PERCOBAAN DAN SIMULASI KECEPATAN MOTOR DC .. 38
IV.1. Umum ... 38
IV.2. Jenis komponen dan spesifikasi peralatan ... 42
IV.3. Pengujian tahanan geser ... 43
IV.3.1 Rangkaian percobaan... 44
IV.3.2 Prosedur percobaan ... .44
IV.3.3 Data percobaan ... .45
IV.4.Pengujian motor DC shunt pengaturan medan shunt ... .46
IV.4.1 Rangkaian percobaan... 46
IV.4.3 Data percobaan ... 47
IV.5 Pengujian motor DC shunt pengaturan jangkar ... 48
IV.5.1 Rangkaian percobaan... 48
IV.5.2 Prosedur percobaan ... 49
IV.5.3 Data percobaan ... 49
IV.6 Pengujian motor DC shunt pengaturan medan dan jangkar ... 50
IV.6.1 Rangkaian percobaan... 50
IV.6.2 Prosedur percobaan ... 51
IV.6.3 Data percobaan ... 52
IV.7 Pemodelan motor DC ... 53
IV.7.1 Pemodelan sistem motor DC ... 53
IV.8 Simulasi dengan simulink matlab ... 54
IV.9 Hasil simulasi dengan simulink matlab ... 55
IV.9.1 Pengaturan tahanan medan ... 55
IV.9.2 Pengaturan tahanan jangkar ... 55
IV.9.3 Pengaturan tahanan medan dan jangkar ... 56
BAB V. ANALISIS PERBANDINGAN ... .58
V.1 Pengujian dengan menggunakan simulink... .58
V.1.1 Hasil simulink pengaturan tahanan medan shunt ... 58
V.1.2 Hasil simulink pengaturan tahanan jangkar ... 59
V.1.3 Hasil simulink pengaturan tahanan jangkar dan medan ... 60
V.2 Analisis Percobaan ... 61
V.2.2 Analisis percobaan penambahan rheostat pada jangkar ... 63
V.2.3 Analisis percobaan penambahan rheostat pada jangkar dan medan 65 V.3 Perbandingan hasil percobaan dengan simulink ... .67
V.3.1 Pengaturan tahanan medan ... .68
V.3.2 Pengaturan tahanan jangkar ... 68
V.3.3 Pengaturan tahanan jangkar dan medan ... 69
BAB VI. KESIMPULAN DAN SARAN ... 70
VI.1 Kesimpulan ... 70
VI.2 Saran-saran ... 71
DAFTAR GAMBAR
Halaman
Gambar 2.1 Konstruksi Motor Arus Searah……….7
Gambar 2.2 Stator………8
Gambar 2.3 Rotor……….8
Gambar 2.4 Rangka gandar dan kumparan medan………...8
Gambar 2.5 Peletakan kumparan medan pada kutub utama……….10
Gambar 2.6 Kutub Utama………..10
Gambar 2.7 Bantalan (bearing) dan Kipa……….11
Gambar 2.8 Sikat dan pemegangnya………..………12
Gambar 2.9 Tutup motor……….………..13
Gambar 2.10 Inti jangkar dan poros………..13
Gambar 2.11 Jenis kumparan jangkar………...14
Gambar 2.12 Letak dan penampang komutator………...15
Gambar 2.13 Pengaruh letak konduktor berarus pada medan magnet yang diam………...15
Gambar 2.14 Kaidah tangan kiri……….16
Gambar 2.15 Model kerja motor-DC……….16
Gambar 2.16 Prinsip kerja motor arus searah……….18
Gambar 2.17 Pembagian motor arus searah………22
Gambar 2.18 Rangkaian ekivalen motor arus searah penguatan beba...………23
Gambar 2.19 Rangkaian ekivalen motor arus searah penguatan seri……….24
Gambar 2.20 Rangkaian ekivalen motor arus searah penguatan shunt………...25
Gambar 2.22 Rangkaian ekivalen motor arus searah penguatan
kompon panjang komulatif (bantu)………..……27
Gambar 2.23. Rangkaian ekivalen motor arus searah penguatan
kompon pendek diferensial (lawan)……….28
Gambar 2.24 Rangkaian ekivalen motor arus searah penguatan
kompon pendek komulatif (bantu)………28
Gambar 3.1 Pengaturan Arah Dengan Menggunakan Saklar………..31
Gambar 3.2 Rangkaian pengaturan kecepatan Motor-DC
pengaturan sumber tegangan………33
Gambar 3.3 Konfigurasi Ward Leonard……….34
Gambar 3.4 Rangkaian pengaturan kecepatan Motor-DC
pengaturan tahanan jangkar…...………..35
Gambar 3.5 Rangkaian pengaturan kecepatan Motor-DC
pengaturan fluks Magnetic……….37
Gambar 4.1 Rangkaian pengaturan tahanan seri pada medan shunt...………38
Gambar 4.2 Rangkaian pengaturan tahanan seri pada jangkar………39
Gambar 4.3 Rangkaian pengaturan tahanan seri pada jangkar
dan medan shunt………..40
Gambar 4.4 Rangkaian pengujian tahanan geser……….44
Gambar 4.5 Rangkaian percobaab pengaturan tahanan seri pada
medan shunt………..46
Gambar 4.6 Rangkaian percobaan pengaturan tahanan seri
pada jangkar...………..48
Gambar 4.7 Rangkaian percobaan pengaturan tahanan seri pada
jangkar dan medan shunt………...………51
Gambar 4.9 Pemodelan motor arus searah……….………..……53
Gambar 4.10 Rangkain motor arus searah penguatan shuntberbeban………54
Gambar 4.11 Pemodelan dengan simulink matlab………..………54
Gambar 4.12 Print screen grafik pengaturan tahanan
medan simulink matlab………..55
Gambar 4.13 Print screen grafik pengaturan tahanan
jangkar simulink matlab………56
Gambar 4.14 Print screen grafik pengaturan tahanan
jangkar dan medan simulink matlab...……….………56
Gambar 5.1 Grafik pengaturan tahanan medan pada simulink matlab………59
Gambar 5.2 Grafik pengaturan tahanan jangkar pada simulinkmatlab………..60
Gambar 5.3 Grafik pengaturan tahanan medan dan jangkar pada
simulink matlab………61
Gambar 5.4 Grafik pengaturan tahanan medan pada
percobaan di laboratorium………63
Gambar 5.5 Grafik pengaturan tahanan jangkar pada
percobaan di laboratorium………65
Gambar 5.6 Grafik pengaturan tahanan medan dan jangkar pada
percobaan di laboratorium………67
Gambar 5.7 Grafik pengaturan tahanan medan pada percobaan di
laboratorium VS simulink………..68
Gambar 5.8 Grafik pengaturan tahanan jangkar pada percobaan di
laboratorium VS simulink………..68
Gambar 5.9 Grafik pengaturan tahanan jangkar dan
DAFTAR TABEL
Halaman
Tabel 4.1 Pengujian tahanan geser………45
Tabel 4.2 Pengujian kecepatan motor dc shunt
pengaturan medan shunt……… 47
Tabel 4.3 Pengujian kecepatan motor dc shunt
pengaturan tahanan jangkar……… 50
Tabel 4.4 Pengujian kecepatan motor dc shunt
pengaturan medan shunt dan tahanan jangkar………52
Tabel 5.1 Hasil simulink kecepatan motor dc shunt
pengaturan medan shunt……… 58
Tabel 5.2 Hasil simulink kecepatan motor dc shunt
pengaturan tahanan jangkar………59
Tabel 5.3 Hasil simulink kecepatan motor dc shunt
Abstrak
Tugas akhir ini bertujuan, Untuk membandingkan kecepatan motor arus searah yang terdapat pada laboratorium konversi energi dengan kecepatan motor dengan menggunakan simulink matlab (sesuai dengan karakteristik mesin yang ada di laboratorium konversi energi). Dalam membuat simulink ini, peralatan yang ada di laboratorium konversi energi listrik FT USU, dijadikan acuan pembanding kelayakan dari simulink yang dibuat.
Untuk perbandingan kecepatan motor arus searah ini, diambil motor arus searah penguatan shunt sebagai acuan. Dalam pengaturannya kita gunakan rheostat yang dipasangkan secara seri dengan tahanan jangkar dan tahanan medan, sedangkan sebagai beban digunakan generator arus searah berpenguatan bebas dengan beban konstan.
Dari hasil percobaan yang dilakukan pada laboratorium dibandingkan dengan penggunaan simulink matlab, simulasi ini layak untuk dijadikan sebagai acuan bagi yang membutuhkan.
BAB I
PENDAHULUAN
I.1 Latar Belakang
Motor adalah mesin yang dapat merubah energi listrik menjadi energi mekanis. Pada motor arus searah (motor DC) energi listrik yang diubah adalah energi arus searah yang berasal dari sumber tegangan listrik arus searah. Dimana sumber tegangan ini dihubungkan kepada rangkaian medan dan rangkaian jangkar dari motor tersebut.
Penggunaan Motor-DC (motor arus searah) sejauh ini telah banyak dimanfaatkan oleh industri yang bergerak di dalam bidang produksi. Sebagai salah satu alat yang vital di dalam proses produksi, tingkat kestabilan motor arus searah sangat perlu diperhatikan. Tingkat stabilitasi motor arus searah ini dapat kita ketahui dengan mengamati kecepatan motor arus searah. Kecepatan yang kita harapkan disini adalah kecepatan yang konstan, sebagai tolak ukur stabilisasi motor arus searah.
motornya. Itulah beberapa alasan yang menjadikan motor arus searah tetap dipakai dalam industry dan tetap perlu dipelajari.
Pergeseran kecepatan Motor-DC saat beroperasi sedapat mungkin kita hindarkan, agar stabilitas sistem tetap terjaga dan tidak mengalami gangguan. Bertolak dari pernyataan diatas, maka perlu dibuat sebuah perbandingan karakteristik kecepatan motor arus searah pada laboratorium, dengan karakteristik kecepatan motor arus searah pada simulink matlab (dengan data yang ada di laboratorium selama perrcobaan dilakukan) yang nantinya diharapkan bermanfaat bagi orang yang membutuhkan hasil dari pengamatan ini. Adapun salah satu tujuannya mengadakan perbandingan ini, adalah agar kita lebih mengenal dan memahami beberapa hal yang mungkin mengurangi kinerja stabilitas dari suatu motor arus searah yang merupakan hasil produksi pabrik seiring dengan waktu dan beberapa keadaan yang tidak mendukung seperti pada masa pembuatannya.
I.2 Tujuan Penulisan
Adapun tujuan penulisan Tugas Akhir ini adalah :
• Membandingkan karakteristik kecpatan motor arus searah hasil
percobaan di laboratorium dengan karakteristik kecepatan motor arus searah hasil simulasi pada simulink matlab.
• Memberikan informasi yang bermanfaat seputar pangaturan
kecepatan motor arus searah.
• Memberikan informasi tentang karateristik kecepatan putar motor arus
searah hasil simulasi dangan menggunakan simulink matlab berdasarakan data – data yang ada
I.3 Batasan Masalah
Demi menjaga pembahasan yang terlalu luas, maka dibuat pembatasan akan masalah yang dibahas di dalam Tugas Akhir ini, antara lain :
• Melakukan percobaan di laboratorium konversi energi listrik.
• Simulasi hanya bersifat pembanding dari hasil percobaan yang
dilakukan di laboratorium.
• Tidak membahas simulink matlab secara mendalam, hanya
membahas seputar pengaturan kecepatan pada motor-dc.
I.4 Metode Penulisan
Metode penulisan yang digunakan antara lain:
• Studi literatur, berupa studi kepustakaan dan kajian dari buku teks,
• Studi diskusi, berupa diskusi dengan dosen pembimbing dan
teman-teman baik di kampus Teknik Elektro USU maupun di luar.
• Studi laboratorium, berupa pengambilan data hasil percobaan di
laboratorium konversi energi listrik Teknik Elektro USU.
I.5 Sistematika Penulisan
Untuk memudahkan pemahaman terhadap Tugas Akhir ini, penulis menyusun dalam bagan seperti di bawah ini ;
• BAB I PENDAHULUAN
Bagian ini berisikan latar belakang, tujuan dan manfaat penulisan, batasan masalah, metodologi penulisan, dan sistematika penulisan.
• BAB II MOTOR-DC
Bagian ini akan menjelaskan teori umum tentang motor arus searah, prinsip kerja motor arus searah, konstruksi motor arus searah, dan beberapa jenis motor arus searah secara umum.
• BAB III PENGATURAN KECEPATAN MOTOR-DC
Bagian ini akan membahas tentang karakteristik dan pengaturan kecepatan motor-dc penguatan shunt,.
• BAB IV PERCOBAAN DAN SIMULASI
• BAB V ANALISIS PERBANDINGAN
Bagian ini membandingkan karakteristik kecepatan motor arus searah hasil percobaan pada laboratorium dengan karakteristik kecepatan motor arus serarah hasil simulasi yang dilakukan pada simulink matlab.
• BAB VI KESIMPULAN DAN SARAN
BAB II
MOTOR DC
II.1. Umum
Sebelum membahas tentang motor-DC ( motor arus searah ), pada dasarnya motor arus searah merupakan suatu mesin arus searah yang dapat juga berubah fungsi menjadi generator arus searah. Sebagaimana dalam prinsip pengoperasiannya, motor arus searah sangat identik dengan generator arus searah. Kenyataannya mesin arus searah yang mampu bekerja dengan baik sebagai motor, akan bekerja dengan baik pula sebagai generator. Oleh sebab itu motor arus searah tidak merupakan bagian yang terpisah dengan generator arus searah, di dalam suatu mesin arus searah yang dapat bekerja sebagai motor maupun generator.
Jadi secara singkat dapat dikatakan bahwa motor arus searah merupakan suatu mesin yang dapat mengubah tenaga listrik arus searah menjadi tenaga gerak (energi mekanik), dimana bahwa energi mekanik yang dihasilkan ini adalah berupa putaran daripada bagian mesin yang bergerak atau disebut juga rotor.
Perkembangan penggunaan motor arus searah saat ini banyak ditemui dalam bentuk aplikasi sebagai motor penggerak. Motor arus searah yang digunakan sebagai penggerak dioperasikan dengan kecepatan yang bervariasi, yang membutuhkan respon dinamis dan keadaan yang steady-state. Pengaturan kecepatan motor arus searah dapat dilakukan dengan memperbesar atau memperkecil arus yang mengalir pada kumparan jangkar dengan menggunakan tahanan. Atau dengan cara menaikkan tegangan suplai yang diberikan pada motor arus searah. Oleh sebab itu motor arus searah sangat banyak digunakan sebagai motor penggerak, karena mudah pengaturannya.
II.2. Konstruksi Motor-DC
Untuk lebih mengenal motor arus searah perlu kita ketahui konstruksi dari pada motor itu sendiri. Adapun konstruksi daripada motor arus searah adalah sebagai yang dipaparkan berikut. Mesin arus searah secara umum terdiri dari stator dan rotor.
Gambar 2.2 Stator Gambar 2.3 Rotor Bagian yang diam (stator) terdiri atas :
• Gandar / Rangka (body)
Gandar atau rangka merupakan tempat untuk meletakkan sebagian besar komponen motor, yang berfungsi untuk melindungi mesin dari gangguan mekanis yang berasal dari luar mesin. Sehingga dalam pembuatannya diperlukan bahan dasar yang kuat untuk menahan gangguan mekanis yang terjadi. Umumnya rangka atau gandar ini dibuat dari bahan baja tuang (cast steel) atau baja lembaran (rolled steel). Disamping itu rangka juga berfungsi untuk mengalirkan fluksi magnet yang dihasilkan oleh kutub – kutub medan karena dibuat dari bahan feromagnetik dengan permaebilitas yang tinggi.
• Kumparan Medan
Kumparan medan yang dikenal juga dengan kumparan penguat yang berfungsi untuk menghasilkan fluks magnet, diletakkan pada inti kutub. Adapun kumparan medan ini akan disuplai dengan sumber tegangan searah (DC). Ada beberapa jenis cara untuk meletakkan kumparan medan dan bagiandari kumparan medan ini, yang diantaranya
Kumparan Shunt
Jumlah lilitan yang banyak, dengan kawat berdiameter kecil menyebabkan tahanannya besar yang memungkinkan diparalel dengan tegangan terminal.
Kumparan Seri
Jumlah lilitan sedikit, namun kawat diameternya besar sehingga mampu dilalui arus cukup besar. Sementara tahanannya kecil sehingga rugi tegangannya kecil.
Kumparan Komutasi / Antara
Disambungkan secara seri dengan kumparan utama sehingga arus yang mengalir cukup besar, dengan penampang yang kawat besar dan jumlah lilitan sedikit.
Kumparan Kompensasi
Gambar 2.5 Peletakan kumparan medan pada kutub utama
• Kutub Utama (main pole)
Kutub utama pada suatu mesin arus searah (motor arus searah) terdiri atas Inti Kutub
Inti kutub ini terbuat dari laminasi baja yang terisolasi satu sama lain dengan permaebilitas tinggi. Bentuknya biasanya datar atau menonjol (salient). Berfungsi untuk menghasilkan fluks magnet.
Sepatu Kutub
Sepatu kutub yang terletak berdekatan celah udara, berfungsi untuk memperlebar fluks magnet agar terdistribusi merata meliputi daerah yang luas di celah udara dan permukaan inti jangkar.
• Kutub Antara
Dengan bentuk yang lebih kecil dari kutub utama, serta jumlah kutub yang sama atau setengah dari kutub utama. Berfungsi untuk membangkitkan fluks magnet di daerah jangkar diantara medan utama agar tidak terdistorsi, distorsi dapat menyebabkan ripple gelombang dan berakibat loncatan api di sikat arang.
• Celah Udara
Celah udara berperan sebagai pemisah antara kumparan jangkar dengan kumparan medan yang memberikan ruang untuk kumparan jangkar berputar, serta sebagai tempat mengalirkan fluks yang dihasilkan oleh kutub - kutub medan.
• Perumahan dan Bearing (bantalan)
Perumahan daripada suatu mesin arus searah dapat dibedakan menjadi : mesin terbuka, setengah terbuka, tahan percikan api, dan tertutup dengan pendingin zat cair atau gas.
Sedangkan bearing (bantalan) adalah merupakan tempat bertumpunya rotor sehingga dapat berputar. Terpasang di ujung rotor, dikenal dengan AS (After Shaft) dan BS (Before Shaft).
• Sikat Arang (carbon brush)
Sikat ini ditempatkan diatas komutator dengan pegas yang memberikan tingkatan penekanan sesuai yang diinginkan. Sikat sebaiknya memiliki konduktivitas tinggi untuk mengurangi rugi – rugi listrik dan memiliki koefisien gesek yang rendah untuk mengurangi keausan (exccesive wear).
Gambar 2.8 Sikat dan pemegangnya
• Fan, Terminal Box dan Tutup (End Plate)
Fan (kipas) terdapat pada motor dengan kapasitas kecil hingga
sedang, yang berfungsi sebagai sistem pendingin sendiri.
Terminal Box merupakan tempat untuk menyambungkan
Tutup yang diletakkan pada kedua sisi ujung rangka berfungsi
sebagai tempat dudukan bantalan poros motor, serta melindungi bagian dalam dari motor.
Gambar 2.9 TutupMotor
Bagian yang berputar (rotor) terdiri atas :
• Inti Jangkar dan Poros Jangkar
Terdiri dari laminasi besi permeabilitas tinggi, terdapat slot atau alur untuk kumparan, berlubang untuk udara pendingin. Inti jangkar berfiungsi sebagai tempat dudukan belitan jangkar, sedangkan poros berfungsi sebagai pemutar beban.
• Kumparan Jangkar
Kumparan jangkar terbuat dari kawat penghantar, sebagai tempat dibangkitkannya GGL induksi. Jenis konstruksi kumparan jangkar pada rotor ada tiga macam yaitu:
Kumparan jerat (lap winding)
Pada lap winding ujung kumparan yang satu terhadap ujung yang lain menempati segmen komutasi berdekatan. Lap winding biasanya terdapat masalah arus putar kumparan (circulating current), maka perlu diantisipasi dengan equalizing.
Kumparan gelombang (wave winding)
Pada suatu kumparan maka ujung yang satu terhadap yang lain menempati jarak yang cukup jauh yaitu 180° listrik.
Kumparan zig – zag (frog-leg winding)
Disebut juga self equalizing winding yang merupakan gabungan antara lap dan wave winding.
• Komutator
Komutator terdiri dari sejumlah segmen tembaga yang berbentuk lempengan yang dirakit ke dalam silinder yang terpasang pada poros. Dimana tiap-tiap lempengan atau segmen komutator terisolasi dengan baik antara satu sama lainnya. Isolasi pada komutator adalah mika. Komutator ini berfungsi untuk merubah arus bolak – balik pada kumparan jangkar menjadi arus searah.
Gambar 2.12 Letak dan penampang komutator
II.3. Prinsip Kerja Motor-DC
Sebelum membahas prinsip kerja dari sebuah motor arus searah, ada baiknya kita ketahui lebih dahulu bahwa sesuai dengan gambar 2.13 di bawah ini,
A B C Gambar 2.13 Pengaruh letak konduktor berarus pada medan magnet
Ketiga gambar diatas menjelaskan pengaruh suatu konduktor yang dialiri oleh arus listrik dan ditempatkan pada medan magnet yang berasal dari kutub yang diam. Suatu konduktor yang dialiri oleh arus akan menimbulkan medan magnet di sekitarnya (A). Sedangkan dua kutub yang tidak sejenis apabila didekatkan akan menimbulkan medan magnet yang terdistribusi merata dan seragam dari kutub utara menuju selatan (B). Konduktor yang dialiri oleh arus listrik tadi ditempatkan pada medan magnet yang dihasilkan oleh kedua kutub (C) akan menimbulkan interaksi antara medan yang ditimbulkan oleh arus pada konduktor dengan medan yang ditimbulkan oleh kedua kutub magnet permanen. Adapun bentuk daripada interksi ini sangat ditentukan oleh besarnya arus yang melalui konduktor tersebut, dan dapat dinyatakan ;
H = l
I N×
Weber/meter ...(2-1)
H = Kuat medan magnet (Weber/meter) I = Arus pada penghantar (Ampere) N = Banyak kumparan (lilitan)
l = Panjang dari penghantar (meter)
Prinsip kerja daripada motor arus searah dapat kita lihat secara sederhana pada gambar di bawah ini :
Dengan kaidah tangan kiri ini dapat kita ketahui prinsip kerja motor arus searah secara sederhana. Pada gambar 2.14 dijelaskan apabila arah medan magnetik (Φ) dari salah satu kutub menuju kutub lain, kemudian suatu penghantar yang dialiri oleh arus listrik (i) diletakkan diantara kedua kutub tersebut maka akan timbul gaya (F) searah dengan ibu jari. Apabila arah medan diubah- ubah dengan cara mengganti letak kutub maka terjadilah putaran.
Sedangkan pada gambar 2.15 adalah suatu percobaan dengan menggunakan peralatan yang sederhana. Dengan sebuah magnet permanen yang berbentuk U, akan menghasilkan arah medan magnet dari kutub utara menuju selatan, selanjutnya dengan menggantung suatu penghantar yang dialiri oleh arus listrik dari terminal positif (+) menuju terminal negatif (-) dan diletakkan diantara kedua kutub magnet tersebut, maka akan timbul gaya sebesar F. Adapun besarnya gaya F yang dihasilkan adalah
F = B · i · l · z newton ...……….(2-2)
Dimana B = Kerapatan medan magnet (tesla)
i = Arus yang mengalir pada konduktor (ampere) l = Panjang konduktor efektif (meter)
z = Jumlah belitan kawat F = Gaya pada kawat (newton)
Gambar 2.16 Prinsip kerja motor arus searah
Kedua kutub stator dibelitkan konduktor yang dialiri oleh arus (If), dengan pemisalan konduktor ini dihubungkan dengan sumber tegangan. Dengan demikian maka kumparan medan (stator) akan menghasilkan fluksi utama (fluksi stator), fluksi yang berasal dari kutub magnet utara menuju selatan ini diilustrasikan dengan garis-garis gaya yang membentuk medan magnet. Apabila sebuah kumparan jangkar yang dialiri oleh arus jangkar (Ia) diletakkan dalam medan magnet, maka sesuai dengan hukum Lorentz dinyatakan dalam konduktor tersebut timbul gaya. Besarnya gaya yang timbul ini sangat dipengaruhi oleh besarnya arus jangkar (Ia) yang mengaliri kumparan jangkar, kerapatan fluksi yang dihasilkan kedua kutub magnet (B), serta panjangnya konduktor jangkar (l).
e = - N
dt dφ
volt ...(2-3)
dengan, φ = φmsinωt
e = N
(
)
dt t sin d φm ω
e = N .ω. φmcos tω volt
Besarnya ggl induksi maksimum dalam satu belitan adalah :
emaks = ω. φm volt
Harga rata – ratanya adalah :
er = π 2
. emaks volt er = π 2
. ω. φm volt
Pada satu putaran jangkar berkutub p, ggl melalui satu periode. Jika jangkar itu mengadakan n rpm atau n rps, maka bagi satu periode lamanya T, adalah :
T = 2 p . n 60 detik
Dalam satu periode dilalui sudut yang besarnya 2π radial, sehingga :
ω =
T 2π
Maka, Ea =
π 2
.
T 2π
. φm volt
Ea = 4 . T 1
. φm volt
Ea = 4 . 60
2 p . n
Jangkar memuat N belitan yang terdiri a cabang paralel, sehingga tiap cabang
jangkar akan mempunyai
a N
buah belitan yang tersambung seri, sehingga :
Ea = 4 . a N . 60 2 p . n
. φm volt
Jika jumlah batang penghantar z, maka N =
2 z
Maka, Ea = 4 . a 2 z . 60 2 p . n
. φm volt
Ea = a 60
z . p
. n . φm volt ... (2-4)
Oleh karena a 60 z . p
bernilai konstan, maka diperoleh :
Ea = c . n . φm volt ...(2-5)
Dimana :
ω = Kecepatan sudut (rad/detik)
T = Periode
n = Kecepatan putaran (rpm) Ea = Gaya gerak listrik induksi (volt)
p = Jumlah kutub
N = Banyaknya kumparan konduktor jangkar (belitan) a = Jalur paralel konduktor jangkar
φ = Fluksi setiap kutub (Weber)
c =
a 60 z . p = konstanta
Pada satu kali putaran gaya F akan menghasilkan kerja sebesar F . 2π . r Joule sehingga daya mekanik (Pm) yang dibangkitkan oleh jangkar untuk n rpm sebesar:
Pm = F . 2π . r . 60
n
Watt ...(2-6)
Pm = (F . r) . 2π . 60
n
Daya yang dibangkitkan oleh jangkar motor yang berubah jadi daya mekanik juga tergantung dari ggl lawan dan arus jangkarnya, sehingga dapat dituliskan :
Ea . Ia = Ta . 2π . 60
n
Sehingga, Ta =
60 n . 2
I Ea. a
π
Newton – meter
Ta = ω
a . aI
E
Newton – meter ...(2-7)
Ta = a
m I . 60 n . 2 . n . a 60 z . p π φ
Ta = a 60
z . p
. n . φm .
n . 2
60 π . Ia
Ta = a . 2 z . p
Oleh karena,
a . 2
z . p
π bernilai konstan, maka diperoleh :
Ta = k . φm . Ia ...…..(2-9)
Dimana :
k =
a . 2
z . p
π = konstanta
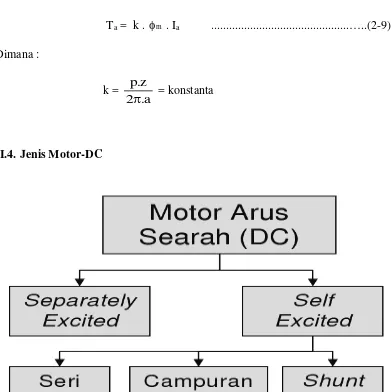
[image:37.595.118.509.140.532.2]II.4. Jenis Motor-DC
Gambar 2.17 Pembagian motor arus searah
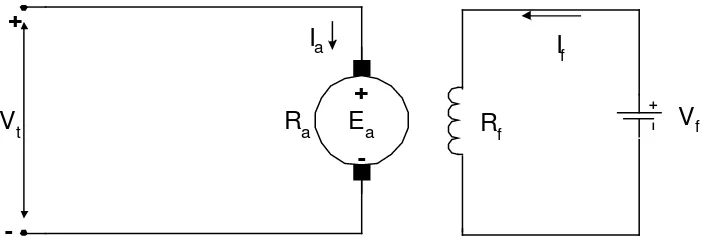
II.4.1 Motor arus searah penguatan bebas (separately excited)
Dikatakan motor arus searah penguatan terpisah, apabila arus penguat kumparan medan magnet diperoleh dari sumber tegangan searah berasal dari luar motor tersebut. Untuk lebih jelasnya dapat kita lihat pada rangkaian ekivalennya sbb :
+
-E
a
R
a Vf
V
t
Ia I
f
+
-R
[image:38.595.152.503.222.346.2]f
Gambar 2.18 Rangkaian ekivalen motor arus searah penguatan bebas
Dari rangkaian tersebut berdasarkan hukum Kirchoff tentang tegangan diperoleh persamaan:
Vt = Ea + Ia.Ra + Vsikat ...(2-10)
Vf = If . Rf ...(2-11)
Dimana:
Vt = tegangan terminal jangkar motor arus searah (volt)
Ra = tahanan jangkar (ohm)
If = arus medan penguatan bebas (ohm)
Vf = tegangan terminal medan penguatan bebas (volt)
Ea = gaya gerak listrik motor arus searah (volt)
Vsikat = jatuh tegangan pada sikat (volt)
Umumnya jatuh tegangan pada sikat relatif kecil sehingga besarnya dapat diabaikan. Dan untuk rumus selanjutnya Vsikat ini diabaikan.
II.4.2 Motor arus searah penguatan sendiri (self excited)
Motor arus searah penguatan sendiri adalah motor arus searah dengan sumber tegangan penguatannya yang berasal dari motor itu sendiri. Dimana kumparan medan berhubungan langsung dengan kumparan jangkar. Kumparan medan dapat dihubungkan secara seri maupun paralel dengan kumparan jangkar. Dan dapat dihubungkan dengan keduanya, yaitu secara seri dan paralel, tergantung pada jenis penguatan yang diberikan terhadap motor.
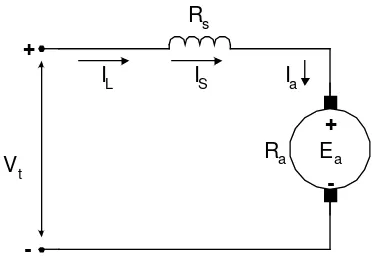
Motor arus searah penguatan sendiri terdiri atas: II.4.2.1 Motor arus searah penguatan seri
Rangkaian ekivalen motor arus searah penguatan seri adalah berikut:
R
s
Vt
+
-Ea Ra
Ia IL
+
[image:39.595.259.445.579.712.2]
-IS
Pada motor arus searah penguatan seri, kumparan medan dihubungkan secara seri dengan rangkaian jangkar. Oleh sebab itu arus yang mengalir pada kumparan medan seri sama dengan arus yang mengalir pada kumparan jangkar.
Persamaan yang berlaku pada motor arus searah penguatan seri adalah:
Vt = Ea + Is.Rs + Ia. Ra ...(2-12)
Karena,
IL= Ia = Is ...(2-13)
Maka,
Vt = Ea + Ia (Ra + Rs) ...(2-14)
Dimana :
Is = arus kumparan medan seri (Ampere)
Rs = tahanan medan seri (ohm)
IL = arus dari jala – jala (Ampere)
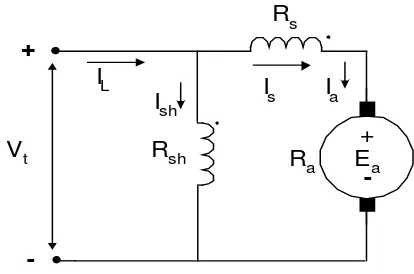
II.4.2.2 Motor arus searah penguatan shunt
Rangkaian ekivalen motor arus searah penguatan shunt adalah
+ -V t E a R a I a I L + -R sh I sh
Pada motor shunt kumparan jangkar dihubungkan langsung pada terminal sehingga paralel dengan kumparan jangkar. Persamaan - persamaan yang berlaku pada motor shunt adalah:
Vt = Ea + Ia.Ra ...(2-15)
sh
I = sh
t R
V
...(2-16)
IL = Ia + Ish ... (2-17)
Dimana :
Ish = arus kumparan medan shunt (Ampere)
Rsh = tahanan medan shunt (Ohm)
II.4.2.3 Motor arus searah penguatan kompon panjang terdiri atas : Pada motor arus searah penguatan kompon panjang, kumparan medan serinya terhubung secara seri terhadap kumparan jangkarnya dan terhubung paralel terhadap kumparan medan shunt. R s Vt -+ R I a
IL I
[image:41.595.243.450.563.700.2]s Rsh Ish Ea a -+
Gambar 2.21 Rangkaian ekivalen motor arus searah penguatan kompon
Pada motor arus searah penguatan kompon panjang diferensial, polaritas kedua kumparan medannya saling berlawanan atau sesuai aturan dot, salah satu arus medannya memasuki dot sedangkan yang lainnya meninggalkan dot, sehingga fluksi yang dihasilkannya menjadi saling mengurangi
[image:42.595.250.467.225.368.2]-R s Vt + E a R a I a IL -I s Rsh I sh . . +
Gambar 2.22 Rangkaian ekivalen motor arus searah penguatan kompon
panjang komulatif (bantu)
Pada motor arus searah penguatan kompon panjang komulatif, polaritas kedua kumparan medannya sama atau dikarenakan kedua arus medannya sama – sama memasuki dot, sehingga fluksi yang dihasilkannya saling menguatkan .
Persamaan - persamaan yang berlaku pada motor arus searah penguatan kompon panjang adalah:
Vt = Ea + Ia Ra + Is Rs ...(2-18)
IL = Ia + Ish ...(2-19)
Maka ;
Is = Ia ...(2-20)
sh t sh
R V
I = ......(2-22)
II.4.2.4 Motor arus searah penguatan kompon pendek
Motor arus searah penguatan kompon pendek, kumparan medan serinya terhubung paralel terhadap kumparan jangkar dan kumparan medan shunt
Rangkaian ekivalen motor arus searah penguatan kompon pendek adalah sebagai berikut:
+ -Ea Ra Vt Ia I L + -R s I s Rsh I sh
Gambar 2.23. Rangkaian ekivalen motor arus searah penguatan
kompon pendek diferensial (lawan)
[image:43.595.242.494.302.420.2]Pada motor arus searah penguatan kompon pendek diferensial, polaritas kedua kumparan medannya saling berlawanan, sehingga fluksi yang dihasilkannya menjadi saling mengurangi. R s Vt -+ Ea Ra I a IL -Is Rsh I sh
Gambar 2.24 Rangkaian ekivalen motor arus searah penguatan
[image:43.595.206.506.504.695.2]Persamaan - persamaan yang berlaku pada motor arus searah penguatan kompon pendek adalah:
Vt = Ea + Ia Ra + Is Rs ...(2-23)
IL = Is = Ia + Ish ...(2-24)
sh s s t sh
R R I V
BAB III
PENGATURAN KECEPATAN MOTOR – DC
III.1 Umum
Pengaturan motor arus searah perlu dilakukan agar motor dapat digunakan dan berfungsi semestinya saat beroperasi. Adapun untuk pengaturan motor arus searah ini terdiri dari beberapa pengaturan variable yang umum dilakukan. Antara lain adalha pengaturan kecepatan, arah putaran dan pengereman motor arus searah.
III.1.1 Pengaturan Kecepatan Motor Arus Searah
Pengaturan kecepatan dari motor arus searah memegang peranan penting dalam penggunaan motor arus searah, karena motor arus searah mempunyai karakteristik torsi-kecepatan yang menguntungkan dibandingkan dengan motor lain. Adapun persamaan dari motor arus searah adalah sebagai berikut
Φ
=Cn
Ea ………...(3-1)
Ra I V
Ea = t − a ...(3-2)
Φ − =
C R I V
n t a a ...(3-3)
III.1.2 Pengaturan Arah Putaran Motor Arus Searah
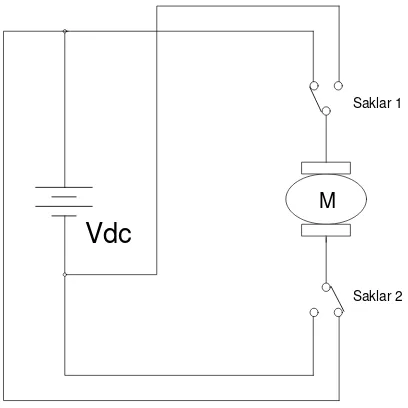
Selain kecepatan putar, yang juga perlu diperhatikan adalah arah putaran motor di dalam pengoperasiannya. Secara umum arah putaran dari sebuah motor dapat dinyatakan dalam dua bentuk yakni searah putaran jarum jam dan melawan arah putaran jarum jam. Adapun cara untuk mengubah arah putaran motor ini adalah dengan mengubah arah arus pada armatur.
Pengaturan semacam ini secara umum dinamakan pengubahan polaritas tegangan motor. Pengaturan polaritas ini dapat kita ilustrasikan pada gambar di bawah ini
M
Saklar 1
[image:46.595.209.413.331.535.2]Saklar 2
Vdc
Gambar 3.1 Pengaturan Arah Dengan Menggunakan Saklar
Perhatikan Gambar 3.1 diatas, apabila kita ilustrasikan dengan keadaan posisi saklar yang sedemikian rupa ternyata arah putaran motor arus searah tersebut adalah mengikuti arah putaran jarum jam, maka untuk mengubah arah putaran pada motor tersebut cukup dengan membalikkan kedua saklar.
membalikkan polaritas (dengan) meletakkan kondisi kedua saklar bukan pada kondisi awal maka putaran akan berubah arah, menjadi melawan arah putaran jarum jam.
III.1.3 Pengereman dan Penghentian Motor Arus Searah
Salah satu masalah yang masih sering dihadapi dalam pengoperasian sebuah motor arus searah adalah masalah penghentian motor (pengereman). Karena pada umumnya untuk berhenti berputar setelah beroperasi memerlukan waktu yang cukup panjang. Maka diperlukan pengereman yang dapat mempercepat waktu pemberhentian motor tersebut.
Cara umum yang digunakan adalah dengan menggunakan teknik pengereman mekanik, dalam bentuk gaya gesek. Adapun cara lain yang dapat digunakan adalah dengan menggunakan pengereman secara elektrik, dimana torsi pengereman dihasilkan berdasarkan nilai arus injeksi yang diberikan pada belitan stator. Pada pengerema secara elektrik ini, energy putaran rotor diubah menjadi energy elektrik yang kemudian dikembalikan ke suplai daya, atau dengan memberikan medan magnet stasioner pada stator sehingga putaran rotor akan terus berkurang.
III.2 Jenis Pengaturan Kecepatan Motor –DC
III.2.1 Pengaturan Kecepatan Putar Motor-DC dengan Pengaturan Sumber
Tegangan
Ra
Ea M
Vs
[image:48.595.188.450.144.327.2]Ia
Gambar 3.2 Rangkaian pengaturan kecepatan Motor-DC pengaturan sumber tegangan
Sebagaimana yang kita ketahui, dengan memvariasikan besar tegangan masukan akan membuat arus bervariasi pula. Kondisi arus yang bervariasi ini akan menyebabkan variasi pada medan penguatan, yang dapat mempengaruhi kecepatan putar suatu motor arus searah.
Pengaturan kecepatan putar motor arus searah dengan cara mengatur tegangan terminal ini, terdapat juga beberapa cara, antara lain
a. Dengan Sistem Ward Leonard
Gambar 3.3 Konfigurasi Ward Leonard
Sebuah tegangan diberikan pada rangkaian medan generator DC tersebut sehingga akan dihasilkan arus medan yang mengalir pada kumparan tersebut sebesar if, sehingga dihasilkan flux magnetik di
kumparan. Diantara medan elektro magnetik diputar sebuah kumparan dengan kecepatan konstan sehingga akan menghasilkan GGL sebesar Eg. Karena putaran rotor berputar konstan sehingga besarnya Eg
proporsional terhadap arus if. Tegangan yang dihasilkan oleh
generator DC tersebut digunakan untuk menggerakkan motor DC pengaturan jangkar, dimana pada kumparan jangkar dari motor diseri dengan sebuah resistor sebesar Ra yang digunakan untuk umpan balik
terhadap rangkaian medan. Akibat adanya GGL Eg tersebut akan
dihasilkan arus jangkar sebesar ia yang mengalir pada kumparan
jangkar dengan arus medan konstan maka kecepatan putaran yang dihasilkan proporsional dengan arus jangkar ia, dampaknya adalah
pada kutub – kutub dari sikat – sikat ( rotor ) akan dihasilkan GGL balik sebesar Eb, yang besarnya dipengaruhi oleh kecepatan motor dan
Ra pada kumparan medan yang dialiri arus jangkar akan timbul drop
tegangan yang diumpanbalikkan ke tegangan rangkaian medan dari generator DC. Motor dikopel dengan beban yang mempunyai inersia J dan koefisien peredaman B, karena poros beban tersebut dihubungkan dengan bearing( penyangga ).
b. Dengan Menggunakan SCR
Dengan memotong gelombang AC sehingga merubah nilai tegangan AC atau disebut juga AC Kontroler, yang dihubungkan dengan jembatan dioda.Metode ini hanya bermanfaat untuk ukuran motor mempunyai daya yang kecil.
c. Dengan Menggunakan DC- Chopper
Dengan mengendalikan tegangan rms masukkan ke motor melalui metode pensaklaran. Metode ini digunakan untuk pada saat start awal motor
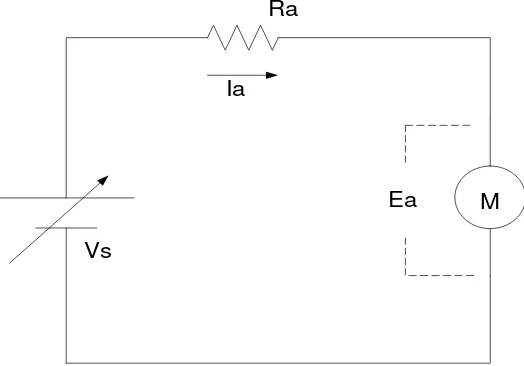
III.2.2 Pengaturan Kecepatan Putar Motor-DC dengan Pengaturan Tahanan
Jangkar
Ra
Ea M
Vs
Ia
R1
Pengaturan jenis ini, putaran Motor-DC yang dihasilkan akan semakin kecil apabila tahanan jangkar semakin besar, yang mengakibatkan arus pada tahanan jangkar kecil. Pengaturan jenis ini jarang digunakan karena rugi panas yang dihasilkan sangat besar.
Berdasarkan persamaan (3-3) diatas :
Φ − = C R I V
n t a a
maka disesuaikan dengan gambar rangkaian ( Gambar 3.4 )
diatas maka diperoleh
Φ + − = C Rs R I V
n t a a
……….. (3-4)
Dimana n = Putaran kecepatan motor ( rpm ) Vt = Tegangan terminal ( volt ) Ia = Arus jangkar ( ampere ) C = Konstanta
Ф = Fluks medan shunt ( weber )
III.2.3 Pengaturan Kecepatan Putar Motor-DC dengan Pengaturan Fluks
Magnetik
Pengaturan jenis ini sangat mudah dan murah biayanya, disamping itu panas yang terjadi rendah. Kecepatan motor arus searah akan minimum apabila Ish minimum. Hal ini terjadi apabila tegangan di R1 maksimum. Perhatikan
Ra
Ea M
Vs
Ia
R1
Rsh IL
Ish
Gambar 3.5 Rangkaian pengaturan kecepatan Motor-DC pengaturan fluks magnetik
Berdasarkan Gambar 3.5 diatas dapat kita peroleh suatu persamaan
Vt = Vsh = Ish . Rsh ……….. (3-5)
Sehingga,
sh I =
1
R R
V sh
t
+ ……….(3-6)
Dimana
Vt = Tegangan terminal (volt)
Ish = Arus medan shunt (ampere)
Rsh = Tahanan shunt (ohm)
BAB IV
PERCOBAAN DAN SIMULASI KECEPATAN MOTOR-DC
IV.1 Umum
Pengaturan kecepatan motor arus searah yang dilakukan dalam percobaan ini, adalah suatu bentuk pengaturan tahanan jangkar dan tahanan medan suatu motor arus searah, dengan menggunakan tahanan luar yang dikombinasikan secara seri di masing-masing tahanan jangkar dan tahanan medan untuk memperoleh sebuah hasil putaran yang diharapkan.
Adapun bentuk percobaan yang dilakukan dapat dibagi menjadi tiga bagian yaitu :
• Pengaturan tahanan seri pada medan shunt
Ra
Ea M
Vs
Ia
R1
Rsh IL
Ish
Gambar 4.1 Rangkaian pengaturan tahanan seri pada medan shunt
Dari gambar 4.1 di atas maka berlaku persamaan
Vs = Ish. (R1+ Rsh) …………..(4-1)
1
R Rsh
Vs Ish
+
= …………..(4-2)
Ea = Vs – IaRa …………..(4-4)
Ea = Ish (Rsh+R1) – Ia Ra …………..(4-5)
Ea = IL – Ia (Rsh+R1) – IaRa …………..(4-6)
Ea = IL (Rsh+R1) – Ia (Rsh+R1) – Ia Ra …………..(4-7)
Ea = IL (Rsh+R1) – Ia (Rsh+R1+Ra) …………..(4-8)
Sehingga :
CnФ = [ IL(Rsh+R1) – Ia(Rsh+R1+Ra) ] ..…………(4-9)
Atau
Φ =
C
n 1 [ IL(Rsh+R1) – Ia(Rsh+R1+Ra) ] rpm …….(4-10)
Maka dengan penambahan R1 akan mempengaruhi besarnya
putaran (n) karena fluks (Ф) akan berubah. Dengan penambahan
R1 ini maka dapat dilakukan pengaturan kecepatan putar motor.
• Pengaturan tahanan seri pada jangkar
Ra
Ea M
Vs
Ia
Rsh IL
Ish R1
Gambar 4.2 Rangkaian pengaturan tahanan seri pada jangkar
Dari gambar 4.2 di atas maka berlaku persamaan
Rsh Vs
Ish= …………..(4-12)
Vs = Ish.Rsh …………..(4-13)
Ea = Vs – Ia (Ra +R1) …………..(4-14)
Maka
Ea = Ish (Rsh) – Ia(Ra+R1) …………..(4-15)
Ea = IL – Ia (Rsh) – Ia(Ra+R1) …………..(4-16)
Ea = IL (Rsh) – Ia (Rsh) – Ia (Ra+R1) …………..(4-17)
Ea = IL (Rsh) – Ia (Rsh+Ra+R1) …………..(4-18) Sehingga :
Φ =
C
n 1 [ IL(Rsh) – Ia(Rsh+R1+Ra) ] rpm ….……….(4-19)
Maka dengan penambahan R1 akan mempengaruhi besarnya
putaran (n) karena fluks (Ф) akan berubah. Dengan penambahan
R1 ini maka dapat dilakukan pengaturan kecepatan putar motor
• Pengaturan tahanan seri pada jangkar dan medan shunt
Ra
Ea M
Vs
Ia
R1
Rsh IL
Ish R2
Dari gambar maka berlaku persamaan :
Ia = IL – Ish …………..(4-20)
1
R Rsh
Vs Ish
+
= …………..(4-21)
Vs = Ish (.Rsh+R1) …………..(4-22)
Ea = Vs – Ia (Ra +R2) …………..(4-23)
Maka
Ea = Ish (Rsh+R1) – Ia(Ra+R2) …………..(4-24)
Ea = IL – Ia (Rsh+R1) – Ia(Ra+R2) …………..(4-25)
Ea = IL (Rsh+R1) – Ia (Rsh+R1) – Ia (Ra+R2) …..(4-26)
Ea = IL (Rsh+R1) – Ia (Rsh+Ra+R1+R2) …………..(4-27)
Sehingga :
CnФ = [ IL(Rsh+R1) – Ia(Rsh+R1+Ra+R2) ] ………(4-28)
Atau
Φ =
C
n 1 [ IL(Rsh+R1) – Ia(Rsh+R1+Ra+R2) ] rpm ….(4-29)
Maka dengan penambahan R1 dan R2 akan mempengaruhi
besarnya putaran (n) karena fluks (Ф) akan berubah. Dengan
IV.2 Jenis Komponen dan Spesifikasi Peralatan
Sebelum melakukan percobaan mengenai pengaturan kecepatan motor arus searah pada Laboratorium Konversi Energi Listrik FT-USU, dilakukan pengenalan beberapa alat yang akan digunakan.
Adapun beberapa peralatan yang digunakan antara lain sebagai berikut :
• Motor arus searah penguatan shunt (motor yang akan diuji).
• Generator arus searah penguatan bebas (sebagai beban konstan)
dengan beban seperempat tahanan geser.
• PTAC dengan penyearah (sebagai PTDC).
• Beberapa multitester.
• Ampere meter dan Voltmeter.
• Tachometer.
• 3 unit tahanan geser yang telah diukur terlebih dahulu besar
tahanannya.
• Beberapa kabel penghubung
Adapun spesifikasi dari motor arus searah yang diuji adalah sebagai berikut :
• Motor yang digunakan dalam pengujian adalah motor arus searah
yang berpenguatan shunt kutub 4
• Terminal jangkar motor pada titik GA dan HB
• Sedangkan terminal medan shunt pada titik J dan K
• Tegangan masukan 220 Volt
• Daya motor 2 Kw
• Tahanan medan 333,3 Ohm
• Tegangan terminal 220 Volt
• Arus jangkar 0,64 Ampere
• Arus beban 9,1 Ampere
• Arus medan 8,46 Ampere
• Putaran 1500 rpm
Adapun spesifikasi dari generator arus searah berpenguatan bebas yang diuji sebagai beban konstan adalah sebagai berikut :
• Arus beban 7,1 Ampere
• Arus penguatan 0,177 Ampere
• Jumlah kutub 4
• Putaran 1400 rpm
• Tahanan jangkar 3,8 Ohm
• Tahanan medan 1,275
• Tegangan masuk 220 Volt
• Terminal jangkar GA - HB
• Terminal medan J - K
IV.3 Pengujian Tahanan Geser
IV.3.1 Rangkaian Percobaan
Untuk memudahkan melakukan pengujian tahanan geser, perhatikan gmbar rangkaian dibawah ini :
PTDC 2
A
V
RL
SW
Gambar 4.4 Rangkaian pengujian tahanan geser
IV.3.2 Prosedur Percobaan
• Persiapkan peralatan sesuai gambar rangkaian, dan rangkailah
peralatan sesuai dengan rangkaian percobaan.
• Naikkan tegangan sumber (Vs) PTDC sampai Voltmeter menunjukkan
angka 10 volt.
• Hubungkan beban dengan menutup saklar
• Bacalah nilai arus yang tertera pada ampere meter
• Naikkan tahanan geser hingga pada Amperemeter mencapai 2 ampere
untuk menandai besar tahanan geser sebesar 5 ohm.
• Ulangi langkah diatas untuk mendapatkan dan menandai nilai tahanan
geser mulai dari 5 – 50 ohm dengan kenaikan interval rata-rata 5 ohm
• Setelah selesai, buka saklar tahanan geser kemudian turunkan tegangan
sumber sampai minimum
IV.3.3 Data Percobaan
[image:60.595.165.459.171.646.2]Vs = 10 volt (dijaga konstan) Tahanan geser 2 buah
Tabel 4.1
No
Vs [Volt]
R [Ohm]
Ia [Ampere]
1 10 5 2
2 10 10 1
3 10 15 0,66
4 10 20 0,5
5 10 25 0,4
6 10 30 0,33
7 10 35 0,285
8 10 40 0,25
9 10 45 0,22
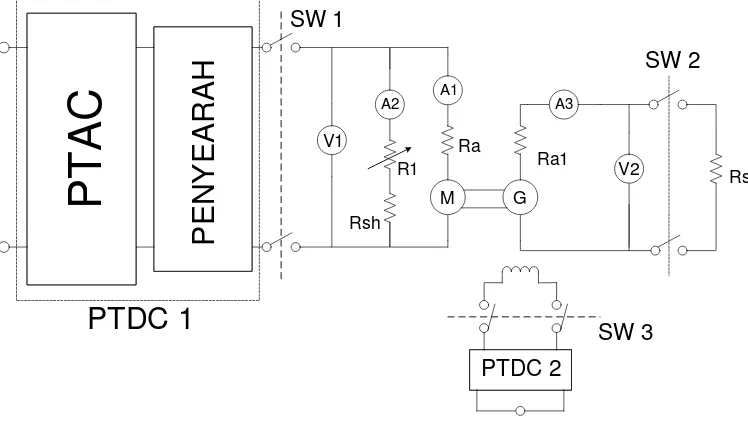
IV.4 Pengujian Kecepatan Motor-DC Shunt Pengaturan Medan Shunt
Salah satu pengaturan kecepatan motor arus searah adalah dengan penambahan tahanan seri pada jangkar. Pengujian dilakukan dengan tegangan sumber (Vs) konstan. Dan beban generator arus searah berpenguatan bebas langsung terhubung pada jangkar motor arus searah shunt.
IV.4.1 Rangkaian Percobaan
Untuk memudahkan memahami pengujian yang akan dilakukan perhatikan rangkaian percobaan dibawah ini :
PTAC
PENYEARAH
PTDC 1
PTDC 2 SW 1
SW 2
SW 3
M G
A1 A2
V1
A3
V2 R1
Rsh
Ra
Ra1
[image:61.595.115.489.335.548.2]Rs
Gambar 4.5 Rangkaian percobaan pengaturan tahanan seri pada medan shunt
IV.4.2 Prosedur Percobaan
• Rangkailah peralatan sesuai dengan rangkaian percobaan.
• Naikkan tegangan sumber sampai mencapai 198 Volt terukur pada
• Hubungkan beban generator berpenguatan bebas berbeban seperempat
tahanan geser pada jangkar motor, dengan catatan tegangan sumber dijaga konstan 198 Volt.
• Naikkan nilai tahanan geser (diserikan dengan medan shunt) yang telah
diukur sebelumnya perlahan dengan interval 5 ohm, dari 5 – 50 ohm.
• Kemudian catat Ia (arus jangkar), Ish (arus medan shunt) dan n
(putaran) di setiap kenaikan tahanan geser.
• Setelah selesai, turunkan beban perlahan, kemudian turunkan tegangan
sumber perlahan hingga minimum dan matikan.
IV.4.3 Data Percobaan
Vs = 198 volt (dijaga konstan)
Dengan beban tetap (generator berbeban seperempat tahanan geser)
Maka : Ifgenerator = 0,177 A
Ibgenerator = 2,45 A
[image:62.595.169.451.450.757.2]Vtgenerator = 120 volt
Tabel 4.2
R
1 (Ohm)Ia
[A
1]
(Ampere)
Ish
[A
2]
(Ampere)
n
(Rpm)
0 2,46 0,63 1030
5 2,48 0,62 1040
10 2,52 0,61 1050
15 2,54 0,59 1055
25 2,57 0,57 1060
30 2,59 0,56 1065
35 2,60 0,55 1070
40 2,63 0,54 1080
45 2,66 0,53 1100
50 2,68 0,52 1100
IV.5 Pengujian Kecepatan Motor-DC Shunt Pengaturan Jangkar
Dengan menghubungkan tahanan geser secara seri dengan jangkar motor arus searah, dapat mengatur kecepatan dari motor arus searah
IV.5.1 Rangkaian Percobaan
PTAC
PENYEARAH
PTDC 1
PTDC 2 SW 1
A2
V1
A3
V2 Rsh
A1
M G
R1 Ra
Ra1
SW 2
SW 3
[image:63.595.114.492.446.663.2]RL
Perhatikan rangkaian percobaan dari pengujian kecepatan motor arus searah dengan menghubungkan tahanan geser secara seri pada jangkar di atas.
IV.5.2 Prosedur Percobaan
• Rangkailah peralatan sesuai dengan rangkaian percobaan.
• Naikkan tegangan sumber sampai mencapai 198 Volt terukur pada
Voltmeter perlahan sampai motor mulai berputar.
• Hubungkan beban generator berpenguatan bebas berbeban seperempat
tahanan geser pada jangkar motor, dengan catatan tegangan sumber dijaga konstan 198 Volt.
• Naikkan nilai tahanan geser (diserikan dengan jangkar) yang telah
diukur sebelumnya perlahan dengan interval 5 ohm, dari 5 – 50 ohm.
• Kemudian catat Ia (arus jangkar), Ish (arus medan shunt) dan n
(putaran) di setiap kenaikan tahanan geser.
• Setelah selesai, turunkan beban perlahan, kemudian turunkan tegangan
sumber perlahan hingga minimum dan matikan.
IV.5.3 Data Percobaan
Vs = 198 volt (dijaga konstan)
Dengan beban tetap (generator berbeban seperempat tahanan geser)
Maka : Ifgenerator = 0,177 A
Ibgenerator = 2,40 A
Tabel 4.3
R
1 (Ohm)Ia
[A
1]
(Ampere)
Ish
[A
2]
(Ampere)
n
(Rpm)
0 2,34 0,64 950
5 2,24 0,64 930
10 2,14 0,63 870
15 2,06 0,62 820
20 1,98 0,62 790
25 1,89 0,62 750
30 1,81 0,62 700
35 1,73 0,62 650
40 1,68 0,62 630
45 1,64 0,62 600
50 1,59 0,62 580
IV.6 Pengujian Kecepatan Motor-DC Shunt Pengaturan Jangkar dan
Medan Shunt
Dengan menghubungkan dua buah tahanan geser masing-masing diserikan dengan tahanan jangkar dan medan shunt, pengaturan kecepatan motor arus searah dapat dilakukan.
IV.6.1 Rangkaian Percobaan
PTAC
PENYEARAH
PTDC 1
PTDC 2 SW 1
A2
V1
A3
V2 Rsh
A1
M G
Ra
Ra1
SW 2
SW 3
RL R1
[image:66.595.114.490.85.303.2]R2
Gambar 4.7 Rangkaian percobaan pengaturan tahanan seri pada jangkar dan medan shunt
IV.6.2 Prosedur Percobaan
• Rangkailah peralatan sesuai dengan rangkaian percobaan.
• Naikkan tegangan sumber sampai mencapai 180 Volt terukur pada
Voltmeter perlahan sampai motor mulai berputar.
• Hubungkan beban generator berpenguatan bebas berbeban seperempat
tahanan geser pada jangkar motor, dengan catatan tegangan sumber dijaga konstan 180 Volt.
• Naikkan nilai tahanan geser (diserikan dengan jangkar dan medan
shunt) yang telah diukur sebelumnya perlahan dengan interval 5 ohm, dari 5 – 50 ohm secara bersamaan.
• Kemudian catat Ia (arus jangkar), Ish (arus medan shunt) dan n
(putaran) di setiap kenaikan tahanan geser.
• Setelah selesai, turunkan beban perlahan, kemudian turunkan tegangan
IV.6.3 Data Percobaan
Vs = 180 volt (dijaga konstan)
Dengan beban tetap (generator berbeban seperempat tahanan geser)
Maka : Ifgenerator = 0,177 A
Ibgenerator = 2,80 A
[image:67.595.165.458.168.616.2]Vtgenerator = 125 volt
Tabel 4.4
R
1 (Ohm)R
2 (Ohm)Ia
[A
1]
(Ampere)
Ish
[A
2]
(Ampere)
n
(Rpm)
0 0 2,80 0,56 1000
5 5 2,77 0,59 950
10 10 2,68 0,61 910
15 15 2,62 0,63 900
20 20 2,60 0,65 900
25 25 2,57 0,67 890
30 30 2,55 0,69 870
35 35 2,52 0,71 860
40 40 2,50 0,73 860
45 45 2,47 0,74 850
IV.7 Pemodelan Motor-DC
Pengaruhpengatuaran kecepatan motor arus searah yang telah kita ketahui sebelumnya dapat kita lihat dalam grafik dibawah ini
Gambar 4.8 Grafik pengaruh beban terhadap kecepatan
IV.7.1 Pemodelan Sistem Motor-DC
Sebuah motor listrik dianggap sebagai sistem dengan masukan energi listrik dan luaran energi mekanik. Sehingga dalam memudahkan analisis bisa digambarkan kedalam model statis, model fisis dan dinamik sebagai berikut :
a. Model Statis
Perhaatikan gambar dibawah ini :
Gambar 4.9 Pemodelan motor arus searah
b. Model Fisis (Rangkaian Listrik)
M
Vs
Rsh
Ra
IL
Ia
Ish
[image:69.595.116.501.424.687.2]L
Gambar 4.10 Rangkain motor arus searah penguatan shunt berbeban
Pemodelan rangkaian fisis dari sebuah motor arus searah dapat diilustrasikan dengan gambar 4.10 diatas. Dengan inputan berupa Vs, dan output berupa beban putaran.
IV.8 Simulasi dengan simulink matlab
IV.9 Hasil simulasi dengan simulink matlab
Hasil dari simulasi simulink matlab ini dapat dibagi menjadi tiga bagian yang sesuai dengan percobaan yang telah dilakukan pada laboratorium konversi energi listrik FT USU.
IV.9.1 Pengaturan tahanan medan
[image:70.595.112.523.331.574.2]Karena pemodelan hanya bersifat steady state maka, grafik juga dalam bentuk steady state, berikut pengujian dengan bentuk penambahan rheostat pada medan shunt.
Gambar 4.12 Print screen grafik pengaturan tahanan medan simulink matlab
IV.9.2 Pengaturan tahanan jangkar
Gambar 4.13 Print screen grafik pengaturan tahanan jangkar simulink matlab
IV.9.3 Pengaturan tahanan jangkar dan tahanan medan
Karena pemodelan hanya bersifat steady state maka, grafik juga dalam bentuk steady state, berikut pengujian dengan bentuk penambahan rheostat pada tahanan jangkar dan tahanan medan
Gambar 4.14 Print screen grafik pengaturan tahanan jangkar dan medan simulink
[image:71.595.113.517.468.706.2]Dari grafik yang terdapat pada gambar untuk urutan parameternya adalah sebagai berikut :
Grafik 1 : Ea (tegangan jangkar) Grafik 2 : Ia (arus jangkar)
Grafik 3 : IL ( [Ia+Ish] arus rangkaian) Grafik 4 : Ish (arus medan)
BAB V
ANALISIS PERBANDINGAN
V.1 Pengujian dengan meggunakan simulinkUntuk memudahkan dalam menganalisis perubahan yang terjadi di setiap penambahan rheostat secara seri pada jangkar dan medan maka data hasil pengujian simulink dituangkan dalam bentuk tabel berikut ini :
[image:73.595.140.483.336.665.2]V.1.1 Hasil simulink pengaturan tahanan medan shunt
Tabel 5.1
R
1(switch) (Ohm)Ia
(display) (Ampere)Ish
(display) (Ampere)n
(display) (Rpm)Ea
(display) (Volt)0 3,611 0,594 1066,944 192,583
5 3,608 0,585 1066,967 192.587
10 3,605 0,576 1066,990 192,591
15 3,603 0,568 1067,012 192,595
20 3,600 0,560 1067,034 192,599
25 3,598 0,552 1067,055 192,603
30 3,595 0,545 1067,076 192,607
35 3,593 0,537 1067,096 192,610
40 3,590 0,530 1067,116 192,614
45 3,588 0,523 1067,135 192,617
Simulink 1066.8 1066.85 1066.9 1066.95 1067 1067.05 1067.1 1067.15 1067.2
0 5 10 15 20 25 30 35 40 45 50
[image:74.595.138.485.383.736.2]Simulink
Gambar 5.1 Grafik pengaturan tahanan medan pada simulink matlab
V.1.2 Hasil simulink pengaturan tahanan jangkar Tabel 5.2
R
1(switch) (Ohm)Ia
(display) (Ampere)Ish
(display) (Ampere)n
(display) (Rpm)Ea
(display) (Volt)0 3,611 0,594 1066,944 192,583
5 3,186 0,594 982,205 177,288
10 2,955 0,594 915,053 165,167
15 2,589 0.594 860,283 155,281
20 2,371 0.594 814,570 147,029
25 2,188 0.594 775,690 140,012
30 2,033 0.594 742,101 133,949
35 1,900 0,594 712,695 128,641
40 1,785 0,594 686,661 123,942
45 1,683 0,594 663,386 119,741
Simulink 0 200 400 600 800 1000 1200
0 5 10 15 20 25 30 35 40 45 50
[image:75.595.116.507.87.321.2]Simulink
Gambar 5.2 Grafik pengaturan tahanan jangkar pada simulink matlab
V.1.3 Hasil simulink pengaturan tahanan jangkar dan medan Tabel 5.3
R
1(Ohm)
R
2(Ohm)
Ia
[A
1]
(Ampere)
Ish
[A
2]
(Ampere)
n
(Rpm)
Ea
(display)(Volt)
0 0 3,611 0,594 1066,944 192,583
5 5 3,184 0,585 982,304 177,306
10 10 2,850 0,576 915,391 165,229
15 15 2,581 0,568 860,982 155,407
20 20 2,361 0,560 815,740 147,241
25 25 2,176 0.552 777,428 140,325
30 30 2,020 0,545 744,491 134,380
35 35 1.885 0,537 715,814 129,204
40 40 1,767 0,530 690,574 124,648
45 45 1,664 0,523 668,153 120,601
Simulink
0 200 400 600 800 1000 1200
0 5 10 15 20 25 30 35 40 45 50
[image:76.595.115.508.87.322.2]Simulink
Gambar 5.3 Grafik pengaturan tahanan medan dan jangkar pada
simulink matlab
V.2 Analisis percobaan
Dari bab IV yang menampilkan data hasil percobaan, dapat ditarik sebuah analisis yang mempengaruhi kecepatan motor arus searah., sesuai dengan perbandingan kecepatan yang berbanding lurus dengan Ea. Maka semakin tinggi Ea putaran akan mengalami kenaikan pula
V.2.1 Analisis percobaan penambahan rheostat pada medan
Dari persamaan
Ea = Vs – Ia Ra
• Ea0 = 198 – (2,46 . 1,5)
• Ea1 = 198 – (2,48 . 1,5)
= 198 - 3,72 = 194,28 Volt
• Ea2 = 198 – (2,52 . 1,5)
= 198 - 3,78 = 194,22 Volt
• Ea3 = 198 – (2,54 . 1,5)
= 198 - 3,81 = 194,19 Volt
• Ea4 = 198 – (2,56 . 1,5)
= 198 - 3,84 = 194,16 Volt
• Ea5 = 198 – (2,57 . 1,5)
= 198 - 3,855 = 194,145 Volt
• Ea6 = 198 – (2,59 . 1,5)
= 198 - 3,885 = 194,115 Volt
• Ea7 = 198 – (2,60 . 1,5)
= 198 - 3,9 = 194,1 Volt
• Ea8 = 198 – (2,63 . 1,5)
• Ea9 = 198 – (2,66 . 1,5)
= 198 - 3,99 = 192,01 Volt
• Ea10 = 198 – (2,68 . 1,5)
= 198 - 4,02 = 193,98 Volt
Percobaan Laboratorium
980 1000 1020 1040 1060 1080 1100 1120
0 5 10 15 20 25 30 35 40 45 50
[image:78.595.118.509.80.486.2]Percobaan Laboratorium
Gambar 5.4 Grafik pengaturan tahanan medan pada
percobaan di laboratorium
V.2.2 Analisis percobaan penambahan rheostat pada jangkar
Dari persamaan
Ea = Vs – Ia Ra
• Ea0 = 198 – (2,34 . 1,5)
• Ea1 = 198 – (2,24 . 6,5)
= 198 - 14,56 = 183,44 Volt
• Ea2 = 198 – (2,14 . 11,5)
= 198 - 24,61 = 173,39 Volt
• Ea3 = 198 – (2,06 . 16,5)
= 198 - 33,99 = 164,01 Volt
• Ea4 = 198 – (1,98 . 21,5)
= 198 - 42,57 = 155,43 Volt
• Ea5 = 198 – (1,89 . 26,5)
= 198 - 50,085 = 194,49 Volt
• Ea6 = 198 – (1,81 . 31,5)
= 198 - 57,015 = 147,915 Volt
• Ea7 = 198 – (1,73 . 36,5)
= 198 - 63,145 = 134,855 Volt
• Ea8 = 198 – (1,68 . 41,5)
• Ea9 = 198 – (1,64 . 46,5)
= 198 - 76,26 = 121,74 Volt
• Ea10 = 198 – (1,59 . 51,5)
= 198 - 81,885 = 116,115 Volt
Percobaan Laboratorium
0 100 200 300 400 500 600 700 800 900 1000
0 5 10 15 20 25 30 35 40 45 50
[image:80.595.118.509.83.486.2]Percobaan Laboratorium
Gambar 5.5 Grafik pengaturan tahanan jangkar pada
percobaan di laboratorium