1
Judul Penelitian:
Pengembangan dan Pengujian Lapangan (Site test)
Pembangkit Listrik Tenaga Gelombang Laut
(PLTGL) - Sistem Multi Pendulum
Tim Peneliti:
Dr. Ridho Hantoro, ST., MT.
Erna Septyaningrum, ST., MT.
Irfan Syarif Arief, ST., MT.
LAPORAN AKHIR
PENELITIAN UNGGULAN ITS (DASAR MULTIDISPLIN)
DANA LOKAL ITS TAHUN 2020
Sesuai Surat Perjanjian
Pelaksanaan
Penelitian No: 825/PKS/ITS/2020
DIREKTORAT RISET DAN PENGABDIAN KEPADA MASYARAKAT
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
SURABAYA
2020
v
DAFTAR ISI
DAFTAR ISI ... v
DAFTAR TABEL ... vii
DAFTAR GAMBAR ... ix
DAFTAR LAMPIRAN ... xi
RINGKASAN ... 2
HASIL PENELITIAN ... 4
1.1
Overview Pembangkit Listrik Tenaga Gelomban (PLTGL) – Multi Pendulum ... 4
1.2
Metode Penelitian ... 7
2.2.1
Metode Simulasi Menggunakan Computational Fluid Dynamics ... 8
2.2.2
Verifikasi hasil Simulasi ... 11
1.3
Simulasi Ponton ... 15
2.3.1
Penentuan Jenis Ponton PLTGL ... 15
2.3.2
Efek Ukuran Pendulum dan Karakteristik Gelombang terhadap Produksi
Energi PLTGL ... 17
2.3.3
Efek Bentuk Hull terhadap Prouduksi Energi PLTGL ... 23
1.4
Fabrikasi Ponton dan Sistem Kerangka Bandul ... 26
1.5
Fabrikasi dan Assembly Sistem Mekanik ... 28
1.6
Pembuatan SLD untuk Sistem Elektrik ... 30
BAB II
STATUS LUARAN ... 32
BAB III
KENDALA PELAKSANAAN PENELITIAN ... 38
BAB IV
RENCANA TAHAPAN SELANJUTNYA ... 40
BAB V
DAFTAR PUSTAKA ... 42
vii
DAFTAR TABEL
Tabel 1. Dimensi Ponton ... 7
Tabel 2. Variasi Simulasi ... 20
Tabel 3. Status Luaran Penelitian ... 32
ix
DAFTAR GAMBAR
Gambar 1. Konsep desain PLTGL [1]. ... 4
Gambar 2. Instalasi PLTGL [1]. ... 4
Gambar 3. Roadmap Pengembangan PLTG – Sistem Pendulum ... 6
Gambar 4. Desain Ponton Segienam ... 6
Gambar 5. Desain Ponton Katamaran ... 7
Gambar 6. Diagram Alir Penelitian Tahun Pertama... 8
Gambar 7. Contoh Simulasi Interaksi Ponton Terhadap Gelombang ... 9
Gambar 8. Contoh Simulasi Interaksi Gerakan Pendulum Terhadap Gerakan Ponton ... 9
Gambar 9. Ponton katamaran simetris ... 10
Gambar 10. Ponton katamaran inner flat hull... 10
Gambar 11. Ponton katamaran outer flat hull... 11
Gambar 12. Nilai Massa Jenis Air dan Nilai Gravitasi ... 11
Gambar 13. Contoh Letak Titik Berat ... 12
Gambar 14. Volume Ponton yang Tercelup Air ... 12
Gambar 15. Nilai Momen Inersia ... 13
Gambar 16. Hasil Meshing ... 13
Gambar 17. Hasil Meshing pada Geometri ... 14
Gambar 18. Set Up untuk pilihan “Use Linear starting Conditions” ... 14
Gambar 19. Set Up Parameter Gelombang ... 15
Gambar 20. Nilai RAO pada variasi periode gelombang 5 sekon... 15
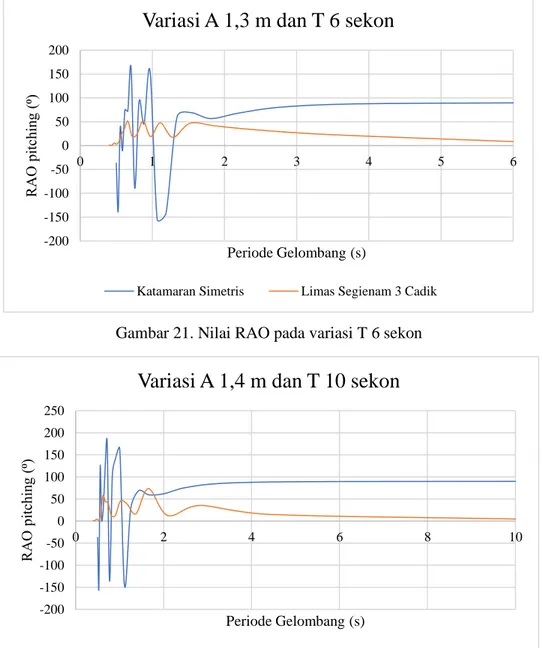
Gambar 21. Nilai RAO pada variasi T 6 sekon ... 16
Gambar 22. Nilai RAO pada variasi T 10 sekon ... 16
Gambar 23. Perbandingan Simpangan Pendulum Variasi 1, 19, dan 37 ... 17
Gambar 24. Perbandingan Simpangan Pendulum Variasi 2, 20, dan 38 ... 18
Gambar 25. Perbandingan Simpangan Pendulum Variasi 3, 21, dan 39 ... 18
Gambar 26. Perbandingan Simpangan Pendulum Variasi 4, 22, dan 40 ... 19
Gambar 27. Perbandingan Simpangan Pendulum Variasi 5, 23, dan 41 ... 19
Gambar 28. Perbandingan simpangan pendulum pada ponton katamaran saat T 2,32 sekon,
dan massa 100 kg ... 23
Gambar 29. Perbandingan simpangan pendulum pada ponton katamaran saat T 2,32 sekon
dan massa 150 kg ... 24
x
Gambar 30. Perbandingan simpangan pendulum pada ponton katamaran saat T 7 sekon dan
massa 100 kg. ... 24
Gambar 31. Perbandingan simpangan pendulum pada ponton katamaran saat T 7 sekon dan
massa 150 kg. ... 25
Gambar 32. Perbandingan simpangan pendulum pada ponton katamaran saat T 12 sekon
dan massa 100 kg. ... 25
Gambar 33. Perbandingan simpangan pendulum pada ponton katamaran saat T 12 sekon
dan massa 150 kg. ... 26
Gambar 34. Proses Fabrikasi Ponton PLTGL – Multi Pendulum ... 27
Gambar 35. Proses fabrikasi (a). Lengan pendulum; (b). Kerangka pendulum ... 28
Gambar 36. Sistem
One-Way Bearing
pada PLTGL Multi Pendulum ... 28
Gambar 37. a.
Bearing
untuk PLTGL Multi Pendulum, b. Sistem mekanik yang telah
dirakit, c. Proses
assembly
dan
fitting
, d. Sistem mekanik PLTGL ... 29
xi
DAFTAR LAMPIRAN
LAMPIRAN 1 TABEL DAFTAR LUARAN ... 45
LAMPIRAN 2 MANUSCRIP CONFERENCE ... 48
LAMPIRAN 3 DESIGN ENGINEERING DRAWING (DED) ... 54
LAMPIRAN 4 SERTIFIKAT KONFERENSI ... 58
2
RINGKASAN
Pembangkit Listrik Tenaga Gelombang Laut (PLTGL) merupakan salah satu bentuk pengembangan dari energi terbarukan sebagai pengganti energi berbahan bakar fosil. Potensi pengembangan energi gelombang laut mencapai 49.000 MW. Riset Pembangkit Listrik Tenaga
Gelombang Laut (PLTGL) merupakan riset multi-years yang telah dilakukan kelompok penelitian
PLTGL ITS sejak tahun 2002. Pada tahapan sebelumnya, kelompok peneliti PLTGL ITS telah melakukan penelitian terhadap sistem pendulum dan sistem ponton, bentuk ponton model silinder dengan silinder kecil (jukung) pada kedua sisinya, pemodelan sistem gerak pendulum pada model
ponton single pendulum menggunakan software Matlab untuk mengetahui dan memprediksi respon
yang akan dihasilkan oleh pendulum, serta yang terbaru pada tahun 2019 telah dilakukan penelitian
menggunakan Software Computational Fluid Dynamic (CFD) dengan model ponton silinder untuk
mengetahui respon gerak dari ponton multi pendulum.
Penelitian yang telah dilakukan oleh kelompok peneliti PLTGL ITS telah mencapai Tingkat Kesiapan Teknologi (TKT) 4 dan telah dilakukan pengujian laboratorium untuk sistem konversi PLTGL dengan tujuan mendapatkan desain ponton dan bandul terbaik. Saat ini tim peneliti ITS telah
meningkatkan penelitian PLTGL ITS hingga mencapai TKT 5 dengan dilakukan site test untuk
ponton yang telah dimodifikasi dari hasil penelitian sebelumnya sehingga pada tahun pertama ini telah dilakukan pengembangan sistem ponton dan fabrikasi sistem ponton yang mampu menghasilkan simpangan maksimal.
Pada penelitian ini diperoleh hasil yang menunjukkan bahwa ponton katamaran simetris
menghasilkan simpangan paling besar dari pada ponton katamaran outter flat hull dan ponton
katamaran inner flat hull. Hal ini diketahui dari simulasi dengan menggunakan variasi periode 2,32
massa 100 kg dan 150 kg serta 12 sekon massa beban 100 kg nilai simpangan yang terjadi pada
ponton katamaran simetris lebih besar jika dibandingkan dengan ponton katamaran outer flat hull
dan inner flat hull. Untuk kondisi ketika dilakukan simulasi menggunakan variasi amplitudo
gelombang 0,35 meter dan 0,6 meter nilai simpangan terbesar rata-rata terjadi pada ponton katamaran simetris. Sementara itu, dimensi dari pendulum juga berpengaruh terhadap simpangan yang mampu dihasilkan. Untuk periode gelombang laut yang rendah (2,32 s), Pendulum dengan simpangan terbesar adalah pendulum yang memiliki panjang 1,25 m. Sementara itu, pendulum 100 kg mampu menghasilkan simpangan terbesar untuk periode gelombang laut yang lebih Panjang yaitu 12 s.
Desain ponton terbaik yaitu ponton katamaran simetris telah ditentukan melalui hasil
simulasi,yang selanjutnya dilakukan pembuatan Design Engineering Drawing (DED) yang
merupakan acuan dalam melakukan proses fabrikasi menggunakan bahan fiberglass, bahan ini
dipilih karena kuat, tahan terhadap korosi dan memiliki harga yang lebih murah jika dibandingkan dengan bahan yang lain. DED yang dibuat meliputi DED sistem ponton dan pendulum, sistem mekanik dan sistem elektrik. Selanjutntya telah dilakukan fabrikasi, assembly dan fitting untuk komponen ponton, pendulum dan sistem mekanik. PLTGL – Sistem Multi Pendulum ini
menggunakan sistem one-way bearing dengan sistem transmisi untuk menyesuaikan gerakannya
dengan input generator.
Dengan hasil yang didapatkan melalui simulasi, desain DED yang meliputi DED sistem ponton dan pendulum, sistem mekanik, serta sistem elektrik sebagai acuan fabrikasi untuk purwarupa berupa ponton dan sistem multi pendulum Pembangkit Listrik Tenaga Gelombang Laut (PLTGL), pada
tanggal 29 – 30 Oktober 2020 telah dilakukan seminar international di The 5th International Tropical
Renewable Energy Conference (iTREC) 2020sebagai hasil luaran penelitian unggulan pada tahun 1.
4
HASIL PENELITIAN
1.1
Overview Pembangkit Listrik Tenaga Gelomban (PLTGL) – Multi PendulumTeknologi sistem konversi energi gelombang laut terdiri dari beberapa konsep yaitu Point
Absorber, Overtopping device, Oscillating Water Column (OWC), Attenuators, Oscillating Wave
Surge Converter (OWSC) dan Submerged Pressure Differential.
Gambar1. Konsep desain PLTGL [1].
Beberapa negara sudah banyak mengembangkan teknologi pembangkit listrik ini. Dari macam – macam konsep pembangkit listrik tenaga gelombang pada Gambar 1, berikut instalasi yang sudah dilakukan di beberapa negara yang disajikan pada Gambar 2 di bawah ini
Gambar 2. Instalasi PLTGL [1].
Teknologi untuk mengeksploitasi gelombang laut dalam bentuk energi pertama kali ditemukan oleh Girard seorang ilmuan dari Perancis pada tahun 1799. Pada abad ke-19, seorang insinyur
5
bernama M. Fursenot di Algeria mengembangkan alat yang dapat menangkap osilasi gelombang laut
dan mengubahnya menjadi bentuk energi lain menggunakan sistem buoyant yang dapat berosilasi ke
atas dan ke bawah. Penelitian tentang sistem konversi energi gelombang laut ini terus dikembangkan
hinga pada tahun 1898, seorang bernama P. Wright mematenkan karyanya yang diberi nama “Wave
Motor”. Pada abad ke- 20, Skotlandia membuat instalasi sistem konversi energi gelombang laut atau
pembangkit listrik tenaga gelombang laut dengan jenis Oscillating Water Column (OWC) di Islay
tepatnya pada tahun 2000 dengan kapasitas daya sebesar 500 kW. Pada tahun 2008 Portugis telah mengembangkan sistem pembangkit listrik tenaga gelombang jenis pelamis yang kemudian juga dikembangkan di UK. Pelamis merupakan divais yang mengapung dengan segmen berbentuk silinder besi berlubang yang dihubungkan satu sama lain pada sambungan dua derajat kebebasan [1].
Di beberapa negara Wave Energy Converter (WECs) telah banyak dikembangkan sebagai
energy alternative pengganti energ fosil. Tahun 2015 China melalui Guangzhou Institute of Energy
Conversion (GIEC) mengembangkan sebuah prototype Sharp Eagle WEC dengan ukuran 36m x 24m
x 16m dengan kapasitas daya 100kW di Pulau Wanshan [2]. Yoshio Masuda mengembangkan buoy
yang selanjutnya dinamakan floating oscillating water column dan dikembangkan sejak tahun 1965
[1]. Denmark juga telah mengembangkan WECs jenis overtopping device yang diberi nama
Wavedragon [3]. Norwegia juga mengembangkan WECs dengan jenis yang sama bernama Tapered
Channel Wave Power Device (Tapchan) [4].
Ditinjau dari potensi Indonesia, pengembangan pembangkit listrik tenaga gelombang laut ini merupakan salah satu sistem konversi energi yang sangat potensial untuk diimplementasikan.
Indonesia merupakan negara kepulauan yang memiliki luas perairan sekitar 3.544.743,9 km2 [5],
sehingga memiliki potensi yang besar untuk sumber energi laut yang dapat dikonversikan menjadi energi listrik. Menurut teori sumber daya energi laut global setara dengan 17.400 Terra Watt jam/tahun [6]. Sedangkan potensi sumber energi laut Indonesia mencapai 4.680 Giga Watt(GW) namun turun menjadi 61 Giga Watt(GW) karena adanya pertimbangan kemajuan teknologi dan kendala transportasi laut serta kondisi lingkungan di dasar laut [7].
Di Indonesia alat konversi energi gelombang laut menjadi energi listrik pertama kali dikembangkan oleh Zamrisyaf pada tahun 2002 yaitu pembangkit listrik tenaga gelombang laut sistem bandul (PLTG-SB). Prinsip kerja dari PLTG-SB ini adalah sistem yang sudah dirancang dalam bentuk ponton, ditempatkan mengapung di atas permukaan air laut. Kemudian sistem tersebut akan mengikuti gerak atau arus gelombang sesuai frekuensi gelombang laut sehingga menyebabkan bandul bergerak. Gerakan tersebut kemudian ditransmisikan dalam gerakan berputar untuk menggerakkan generator kemudian menjadi energi listrik. Daya yang dihasilkan oleh PLTG-SB ini banyak dipengaruhi oleh dimensi ponton, panjang bandul, massa bandul dan susunan ponton [8]. Pengembangan PLTGL-Sistem Pendulum ini dilakukan secara eksperimental menggunakan ponton berukuran 4,8 m x 3 m x 3 m dengan besar 13 ton, dan mampu menghasilkan daya kurang lebih 2
6
kW. Penelitian ini kemudian terus dilakukan untuk menganalisa aspek krusial dari sistem ini, yaitu sistem ponton dan sistem pendulum, seperti ditunjukkan pada Gambar 3. Penelian lebih lanjut perlu dilakukan untuk mendapatkan sistem PLTGL yang lebih optimal
Gambar 3. Roadmap Pengembangan PLTG – Sistem Pendulum
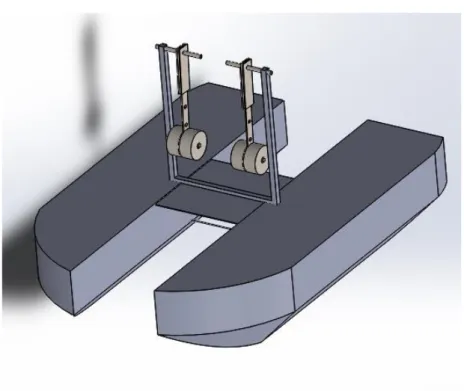
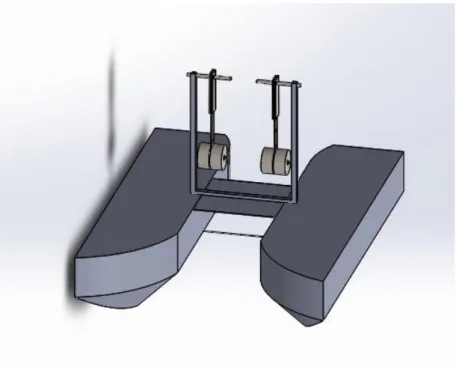
Melanjutkan dari penelitian yang sudah dilakukan sebelumnya, akan dilakukan penelitian terkait ponton limas segi enam dan ponton katamaran dengan tujuan untuk mendapatkan desain ponton yang mampu menghasilkan RAO yang besar pada gelombang dengan amplitudo rendah. Ponton limas segi enam memiliki 4 pendulum berbentuk juring dan 3 cadik yang memanjang di sekitar lambung utama seperti ditunjukkan oleh Gambar 4. Sedangkan ponton katamaran memiliki pendulum yang memanjang dan menggantung di antara 2 lambung ponton seperti ditunjukkan pada
Gambar 5. Sementara itu dimensi ponton ditunjukkan pada Tabel 1
.
7
Gambar 5. Desain Ponton Katamaran Tabel 1. Dimensi Ponton
Jenis Ponton Parameter Nilai (m)
Ponton Limas Segi 6
Tinggi 1.2 Lebar lingkaran/ponton utama 1.7 Panjang cadik 3 Ponton Katamaran Panjang lambung 5 Lebar lambung 1.1 Tinggi lambung 1
Jarak antar lambung 1
1.2
Metode PenelitianAspek yang menjadi dasar penelitian ponton pembangkit listrik tenaga gelombang laut (PLTGL) ini meliputi desain dan pengujian lapangan yang terbagi dalam jangka waktu penelitian tahun pertama dan kedua. Untuk tahun pertama pengembangan PLTGL-Multi Pendulum menitik beratkan pada simulasi, penentuan desain serta fabrikasi ponton dan sistem mekanik. Adapun tahapan penelitian dapat digambarkan sebagai berikut:
8
Gambar 6. Diagram Alir Penelitian Tahun Pertama
2.2.1
Metode Simulasi Menggunakan Computational Fluid DynamicsSimulasi dilakukan dengan melalui dua tahapan, tahapan pertama dilakukan untuk melihat interaksi gelombang yang datang dengan ponton. Setalah hasilnya akan digunakan sebagai data masukan untuk simulasi untuk melihat gerakan pendulum akibat dari gerakan ponton. Untuk simulasi pada tahapan pertama dibutuhkan berbagai macam nilai yang diperlukan seperti sarat air, nilai titik berat, dan titik gaya angkat. Data tersebut dapat diperoleh melalui perangkat lunak desain yang digunakan.
Pada simulasi ini digunakan ombak yang datang sejajar dengan sumbu x setalah itu juga dimasukkan untuk variasi dari tinggi dan periode gelombang. Pada hasil simulasi ini akan didapatkan nilai simpangan dari ponton akibat dari gelombang. Simpangan dari ponton yang diambil merupakan
9
gerakan ponton yang berotasi terhadap sumbu y atau biasa disebut dengan pitching. Dan nantinya gerakan inilah yang mengakibatkan pendulum dapat berotasi. Kemudian data tersebut digunakan untuk masukkan dari simulasi gerakan pendulum akibat dari gerakan ponton yang dikenai gelombang.
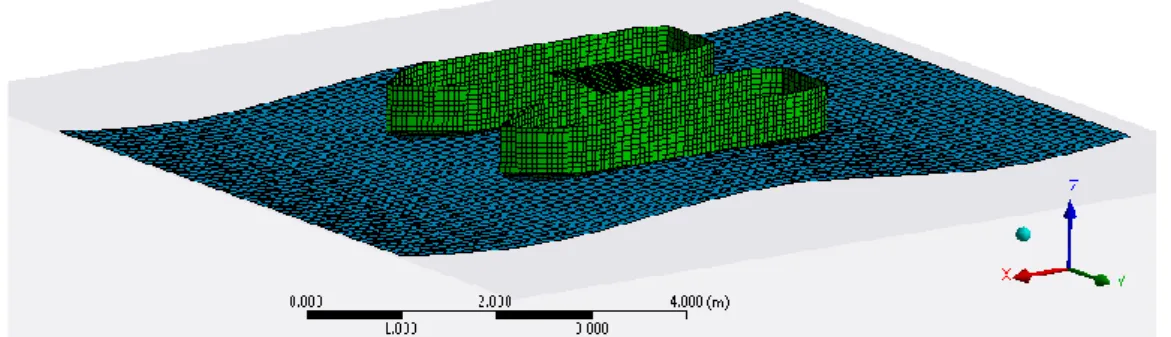
Pada simulasi tahap pertama desain yang digunakan cukup bagian pontonnya saja dengan menggunakan seluruh parameter – parameter ketika ponton telah menopang seluruh sistem diatasnya. Pada gambar 7 berikut merupakan contoh hasil ketika ponton telah disimulasikan terhadap gelombang laut dengan salah satu parameter pada variasi yang telah ditentukan. Setelah simulasi
telah dilakukan maka akan didapatkan data berupa pitching ponton.
Gambar 7. Contoh Simulasi Interaksi Ponton Terhadap Gelombang
Pada simulasi tahap kedua disini dimasukkan geometri keseluruhannya karena yang akan
ditinjau adalah pendulumnya. Setelah itu geometri ini diberikan masukkan data berupa pitching
ponton yang telah diperoleh pada tahap pertama setelah itu ponton akan berotasi sesuai data yang telah dimasukkan dan bandul akan mengayun. Data simpangan bandul ini akan diambil untuk dilakukan analisis.
Gambar 8. Contoh Simulasi Interaksi Gerakan Pendulum Terhadap Gerakan Ponton
Simulasi dengan menggunakan Computational Fluid Dynamics ini dilakukan sebanyak 3 kali
10
katamaran simetris, katamaran outer flat hull dan katamaran inner flat hull. Dari ketiga model ponton
ini akan dibandingkan mana yang menghasilkan gerakan dan simpangan ponton yang maksimal pada keadaan gelombang yang memiliki amplitudo kecil. Model ponton yang digunakan dapat dilihat pada Gambar 9-11 berikut ini.
Gambar 9. Ponton katamaran simetris
11
Gambar 11. Ponton katamaran outer flat hull
2.2.2
Verifikasi hasil SimulasiVerifikasi hasil simulasi merupakan sebuah tahapan dimana dilakukan pengecekan terhadap
set up parameter yang digunakan terhadap simulasi yang telah dilakukan. Pertama diperlukan
melakukan setup untuk ukuran laut yang digunakan untuk simulasi dan juga untuk massa jenis airnya,
digunakan untuk besar nilai massa jenisnya adalah 1025 kg/m3 seperti pada Gambar 12 sedangkan
untuk nilai gravitasi yang digunakan adalah 9.80665 m/s2.
Gambar 12. Nilai Massa Jenis Air dan Nilai Gravitasi
Sebelum melakukan simulasi diperlukan penentuan sarat air pada ponton, penentuan ini harus disesuaikan dengan beban yang ditopang oleh ponton. Dengan menggunakan persamaan 2.6 maka dapat ditentukan untuk sarat air ponton. Setelah dilakukan perhitungan desain ponton ini dengan sarat air 0.45 m dapat menopang beban seberat 1342.75 kg, sehingga dapat menopang beban terberat dari variasi yang akan disimulasikan yaitu 1086 kg. Data pertama yang digunakan untuk melakukan simulasi ponton terhadap gelombang laut merupakan titik berat. Titik berat dari seluruh komponen
12
ini dapat diperoleh dari perangkat lunak desain 3D. Gambar 13 merupakan salah satu contoh letak titik berat dari suatu benda.
Gambar 13. Contoh Letak Titik Berat
Selain titik berat juga diperlukan untuk memasukkan parameter untuk volume yang tercelup air. Nilai ini dapat diperoleh dengan cara memotong desain 3D dengan menyisakan bagian yang tercelup pada air. Apabila ponton memiliki sarat air 0.45 meter maka didapatkan volume yang
tercelup sebesar 1.31 meter3. Pada Gambar 14 berikut adalah hasil perhitungan volume melalui
perangkat lunak desainer yang digunakan.
Gambar 14. Volume Ponton yang Tercelup Air
Kedua, data yang dibutuhkan untuk melakukan simulasi pada perangkat lunak CFD
(Computational Fluid Dynamics) yang digunakan adalah momen inersianya yang juga didapatkan
dari perangkat lunak desain 3D. Pada Gambar 15 berikut merupakan salah satu contoh nilai momen inersia dari variasi yang digunakan.
13
Gambar 15. Nilai Momen Inersia
Selanjutnya adalah meshing disini diperlukan untuk memasukkan defeaturing tolerance dan
maximum element size berikut adalah nilai yang dimasukkan seperti pada gambar 16.
Gambar 16. Hasil Meshing
Ketentuan dari penyedia perangkat lunak simulasi ini adalah memiliki nilai total elements
yang tidak melebihi 40000 elemen untuk versi 64-bit dan 18000 elemen untuk versi 32-bit. Semakin
besar nilai maximum element size maka hasilnya akan kurang akurat. Pada salah satu jurnal
menggunakan ukuran maximum element size 0.5 meter [9]. Setelah melakukan meshing maka
14
Gambar 17. Hasil Meshing pada Geometri
Selain simulasi untuk hydrodynamic diffraction untuk mendapatkan data time response
analysis maka diperlukan untuk simulasi pada hydrodynamic response dan salah satu pengaturan
yang diubah yaitu “Use Linear starting Conditions”, karena simulasi pada hydrodynamicresponse
merupakan simulasi lanjutan dari simulasi hydrodynamic diffraction maka diperlukan melakukan
pengaturan tersebut agar posisi ponton pada simulasi hydrodynamicresponse memiliki posisi yang
sama dengan posisi ketika simulasi hydrodynamic diffraction. Pada gambar 18 berikut merupakan
set up untuk pilihan “Use Linear starting Conditions”.
Gambar 18. Set Up untuk pilihan “Use Linear starting Conditions”
Parameter yang terakhir merupakan konfigurasi untuk gelombang, sesuai dengan variasi yang telah digunakan untuk amplitudo dan periodenya. Untuk amplitudo digunakan variasi 0.1, 0.35 dan 0.6 meter. Sedangkan untuk periode digunakan variasi 2.32, 7, dan 12 detik. Ketika memasukkan parameter ini juga terdapat opsi untuk parameter frekuensinya namun jika sudah memasukkan parameter periode maka parameter frekuensinya tidak perlu dilakukan lagi. Selain itu juga diberi arah datang gelombang, arah 180° ini merupakan gelombang yang datang dari depan ponton. Pada
15
Gambar 19. Set Up Parameter Gelombang
1.3
Simulasi Ponton2.3.1
Penentuan Jenis Ponton PLTGLPenentuan jenis ponton PLTGL dilakukan dengan melakukan simulasi pada ponton limas segi enam 3 cadik dan ponton katamaran simetris untuk mendapatkan nilai RAO yang besar pada gelombang dengan amplitudo kecil. Pada tahap ini simulasi dilakukan dengan menggunakan variasi sarat air, amplitudo dan periode gelombang. Hasil simulasi dapat dilihat pada Gambar 20-22 di bawah ini.
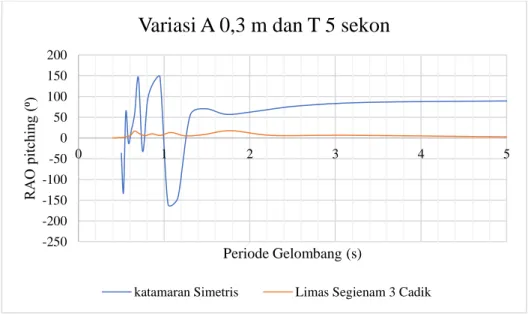
Gambar 20. Nilai RAO pada variasi periode gelombang 5 sekon
Gambar 20 menunjukkan grafik periode gelombang terhadap nilai RAO arah sumbu y (pitch)
pada amplitudo gelombang 0,3 meter. Berdasarkan pada grafik tersebut dapat diketahui bahwa nilai RAO yang dihasilkan oleh ponton dengan bentuk katamaran simetris menghasilkan nilai RAO yang lebih besar jika dibandingkan dengan ponton bentuk limas segienam 3 cadik. Pada ponton katamaran simetris nilai RAO maksimum sebesar 146⁰ sedangkan pada ponton limas segienam 3 cadik sebesar 17⁰. Hal yang sama juga terjadi pada variasi amplitudo 1,3 meter dan periode gelombang 6 sekon
-250 -200 -150 -100 -50 0 50 100 150 200 0 1 2 3 4 5 R A O pitch in g (⁰) Periode Gelombang (s)
Variasi A 0,3 m dan T 5 sekon
16
pada Gambar 21 dimana nilai RAO ponton dengan bentuk katamaran simetris lebih besar dari ponton limas segienam 3 cadik. Besarnya nilai RAO pada ponton katamaran simetris 164⁰ dan 51⁰ untuk ponton bentuk limas segienam 3 cadik.
Gambar 21. Nilai RAO pada variasi T 6 sekon
Gambar 22. Nilai RAO pada variasi T 10 sekon
Gambar 22 merupakan grafik hubungan antara nilai RAO terhadap periode gelombang pada
amplitudo 1,4 meter. Pada grafik tersebut terlihat memiliki trendline yang sama dengan grafik pada
Gambar 20 dan 21 dimana nilai RAO pada ponton katamaran simetris jauh lebih besar daripada ponton limas segienam 3 cadik. Pada ponton katamaran simetris nilai RAO yang dihasilkan dari variasi periode gelombang 10 sekon dan amplitudo gelombang 1,4 meter sebesar 176⁰. Sedangkan pada ponton limas segienam 3 cadik menghasilkan RAO sebesar 73⁰. Jika dilihat dari ketiga grafik tersebut dapat disimpulkan bahwa semakin besar periode gelombang dan amplitudonya maka nilai
-200 -150 -100 -50 0 50 100 150 200 0 1 2 3 4 5 6 RA O p itch in g (⁰) Periode Gelombang (s)
Variasi A 1,3 m dan T 6 sekon
Katamaran Simetris Limas Segienam 3 Cadik
-200 -150 -100 -50 0 50 100 150 200 250 0 2 4 6 8 10 R A O pitch in g (⁰) Periode Gelombang (s)
Variasi A 1,4 m dan T 10 sekon
17
RAO nya juga semakin besar. Nilai RAO yang besar dihasilkan oleh ponton dengan bentuk katamaran simetris.
Berdasarkan hasil simulasi yang dilakukan untuk, maka pada penelitian ini digunakan ponton jenis Katamaran, karena ponton ini memiliki RAO yang lebih besar jika dibandingkan dengan ponton limas segi enam 3 cadik. Selanjutnya dilakukan variasi ukuran pendulum untuk beberapa karakteristik gelombang yang berbeda.
2.3.2
Efek Ukuran Pendulum dan Karakteristik Gelombang terhadap Produksi Energi PLTGLSimulasi untuk mengetahui pengaruh ukuran pendulum dan karakteristik gelombang terhadap produksi energi pada PLTGL dilakukan setelah didapatkan desain ponton yang manghasilkan nilai RAO tertinggi. Nilai RAO terbesar dihasilkan oleh ponton dengan bentuk katamaran simetris. Sehingga pada simulasi tahap 2 ini dilakukan simulasi pada ponton katamaran simetris dengan variasi panjang lengan pendulum, amplitudo gelombang dan periode gelombang. Variasi panjang lengan pendulum yang digunakan yaitu 1; 1,25 dan 1,5 meter dengan variasi amplitudo gelombang 0,1 ; 0,35 dan 0,6 meter. Sedangkan variasi periode gelombang yang digunakan sebesar 2,32 ; 7 dan 12 sekon.
Setelah dilakukan simulasi terhadap variasi panjang lengan maka dapat dilihat pengaruh dari perubahan panjang lengan pendulum terhadap gerakan pendulum. Berikut adalah grafik untuk
perbandingan simpanganpendulum dengan massa beban 100 kg, pada periode 2.32 s dan amplitudo
gelombang 0.1 meter dengan variasi panjang lengan pendulum terkait.
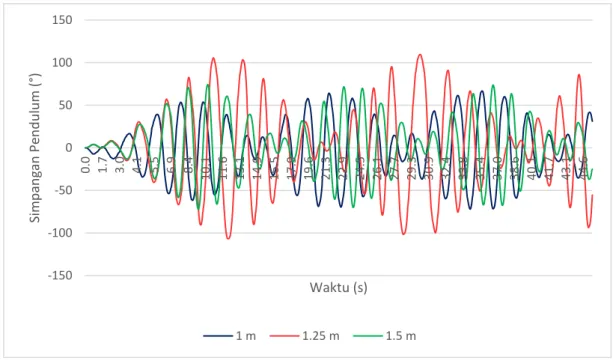
Gambar 23. Perbandingan Simpangan Pendulum Variasi 1, 19, dan 37
-150 -100 -50 0 50 100 150 0.0 1.7 3.0 4.1 5.5 6.9 8.4 10.1 11.6 13.1 14.9 16.5 17.9 19.6 21.3 22.9 24.5 26.1 27.7 29.3 30.9 32.4 33.8 35.4 37.0 38.6 40.1 41.7 43.1 44.6 Sim p an gan P en d u lu m ( °) Waktu (s) 1 m 1.25 m 1.5 m
18
Gambar 23 merupakan perbandingan simpangan pendulum terhadap variasi panjang lengan pendulum pada saat periode gelombang 2,32 sekon dan amplitudo 0,1 meter. Dapat dilihat apabila simpangan pendulum pada gelombang laut dengan amplitudo 0.1 meter dan periode 2.32 s memiliki simpangan pendulum tertinggi ketika memiliki panjang lengan 1.25 meter. Hal yang sama juga terjadi saat ponton dikenai periode gelombang 7 sekon seperti pada Gambar 24. Simpangan pendulum paling besar terjadi pada ponton dengan panjang lengan pendulum 1,25 meter.
Gambar 24. Perbandingan Simpangan Pendulum Variasi 2, 20, dan 38
Gambar 25. Perbandingan Simpangan Pendulum Variasi 3, 21, dan 39
Sama seperti ketika ponton dikenai periode gelombang 2,32 dan 7 sekon, Gambar 25 merupakan grafik yang menunjukkan perbandingan simpangan pendulum saat ponton dikenai periode gelombang 12 sekon. Pada gambar 25 dapat terlihat simpangan pendulum pada gelombang
-25 -20 -15 -10 -5 0 5 10 15 20 25 30 0.0 2.0 4.2 6.2 8.4 10.5 12.7 14.9 16.9 18.9 21.2 23.5 25.8 28.1 30.4 32.5 34.4 36.8 38.9 40.8 42.8 44.9 46.8 48.9 50.8 52.7 54.4 Sim p an gan P en d u lu m ( °) Waktu (s) 1 m 1.25 m 1.5 m -50 -40 -30 -20 -10 0 10 20 30 40 50 0.0 2.0 4.1 6.2 8.3 10.4 12.4 14.2 16.0 17.7 19.4 21.1 22.9 24.8 26.5 28.1 29.8 31.4 32.9 34.6 36.2 37.7 39.1 40.5 41.8 43.2 44.6 Sim p an gan P en d u lu m ( °) Waktu (s) 1 m 1.25 m 1.5 m
19
laut dengan amplitudo 0.1 meter dan periode 12 sekon juga memiliki simpangan pendulum tertinggi ketika memiliki panjang lengan 1.25 meter. Dari ketiga grafik tersebut dapat disimpulkan bahwa untuk ponton dengan variasi panjang lengan pendulum 1, 1,25 dan 1,5 meter pada kondisi gelombang dengan amplitudo gelombang 0,1 meter menghasilkan simpangan paling besar pada panjang lengan pendulum 1,25 meter. Untuk simpangan pendulum pada variasi amplitudo 0,35 meter dapat dilihat pada Gambar 26-27
Gambar 26. Perbandingan Simpangan Pendulum Variasi 4, 22, dan 40
Gambar 27. Perbandingan Simpangan Pendulum Variasi 5, 23, dan 41
Gambar 26 dan 27 merupakan grafik perbandingan simpangan pendulum pada saat periode gelombang 2,32 dan 7 sekon. Pada Gambar 26 dapat dilihat apabila simpangan pendulum pada gelombang laut dengan amplitudo 0.35 meter dan periode 2.32 sekon memiliki karakter yang berbeda
-6000 -4000 -2000 0 2000 4000 6000 8000 0.0 2.1 3.5 5.5 7.6 10.0 12.3 14.4 16.4 18.2 20.0 21.9 23.9 26.0 27.9 29.8 31.7 33.5 35.5 37.6 39.4 41.0 42.5 43.9 45.4 47.0 48.7 Sim p an gan P en d u lu m ( °) Waktu (s) 1 m 1.25 m 1.5 m -1000 -500 0 500 1000 1500 2000 0.0 4.1 7.1 9.7 12.1 14.6 17.1 19.5 21.7 23.9 25.9 27.8 30.0 32.2 34.2 35.9 37.7 39.6 41.3 43.0 44.7 46.7 48.4 50.2 52.1 54.2 55.8 Sim p an gan P en d u lu m ( °) Waktu (s) 1 m 1.25 m 1.5 m
20
dibandingakan dengan grafik sebelumnya, namun tetap memiliki simpangan tertinggi pada panjang lengan 1.25 meter. Pada grafik tersebut terlihat sudut simpangan telah melampaui 360°, hal ini berarti pendulum telah berputar penuh. Sedangkan pada Gambar 27 dapat dilihat apabila simpangan pendulum pada gelombang laut dengan amplitudo 0.35 meter dan periode 7 sekon memiliki simpangan pendulum tertinggi ketika memiliki panjang lengan 1.25 meter. Pada grafik tersebut terlihat sudut simpangan telah melampaui 360°, hal ini berarti pendulum telah berputar penuh. Karakteristik yang sama juga terjadi pada variasi amplitude 0,6 meter dimana simpangan terbesar terjadi pada panjang lengan pendulum 1,25 meter. Sehingga dapat disimpulkan bahwa untuk variasi panjang lengan pendulum dari periode gelombang 2,32 ; 7 dan 12 sekon serta amplitudo gelombang 0,1 ; 0,35 dan 0,6 meter, simpangan terbesar dapat dihasilkan dari ponton dengan panjang lengan 1,25 meter. Berikut adalah tabel variasi simulasi disajikan pada tabel 2.
Tabel 2. Variasi Simulasi
No
Panjang Lengan Bandul (m) Massa Bandul (Kg) Amplitudo Gelombang (m) Periode Gelombang (s) 1 1 100 0,1 2,32 2 7 3 12 4 0,35 2,32 5 7 6 12 7 0,6 2,32 8 7 9 12 10 152 0,1 2,32 11 7 12 12 13 0,35 2,32 14 7 15 12 16 0,6 2,32 17 7 18 12 19 1,25 100 0,1 2,32 20 7 21 12 22 0,35 2,32 23 7
21
No
Panjang Lengan Bandul (m) Massa Bandul (Kg) Amplitudo Gelombang (m) Periode Gelombang (s) 24 12 25 0,6 2,32 26 7 27 12 28 152 0,1 2,32 29 7 30 12 31 0,35 2,32 32 7 33 12 34 0,6 2,32 35 7 36 12 37 1,5 100 0,1 2,32 38 7 39 12 40 0,35 2,32 41 7 42 12 43 0,6 2,32 44 7 45 12 46 152 0,1 2,32 47 7 48 12 49 0,35 2,32 50 7 51 12 52 0,6 2,32 53 7 54 12
Pada desain ponton katamaran simetris ini pendulum menggunakan variasi panjang lengan pendulum 1, 1.25, dan 1.5 meter serta menggunakan massa beban dengan variasi 100 dan 152 kg. Pemilihan variasi tersebut karena pertimbangan torsi minimum yang harus dicapai untuk penggunaan pada generator 1 KW dengan spesifikasi 600 RPM, melalui perhitungan. Pada simulasi awal
22
didapatkan nilai pitching terendah dengan nilai sekitar 18.5°, maka jika menggunakan panjang
lengan pendulum 1 meter harus diberi massa beban minimum 98.45 kg. Dari perhitungan tersebut maka digunakanlah variasi – variasi seperti pada tabel 2.
Simulasi terhadap perubahan panjang lengan pendulum untuk hasilnya pada kondisi gelombang 0.1 meter dengan periode 2.32, 7, dan 12 s serta pada kondisi gelombang 0.35 meter dengan periode 2.32 dan 7 s didapatkan untuk nilai simpangan pendulum tertinggi terjadi ketika menggunakan Panjang lengan 1.25 meter. Kondisi tersebut terjadi ketika menggunakan massa beban 100 kg. sedangkan untuk kondisi lainnya ketika menggunakan massa beban 100 kg rata – rata memiliki simpangan yang lebih tinggi ketika menggunakan Panjang lengan pendulum 1 meter. Untuk kodisi ketika menggunakan variasi massa beban 152 kg rata – rata juga terjadi ketika menggunakan panjang lengan pendulum 1.25 meter. Jadi dapat disimpulkan dari 54 variasi yang digunakan rata – rata memiliki simpangan terbaik ketika menggunakan panjang lengan 1.25 meter.
Pada hasil simulasi variasi perubahan massa beban pendulum dengan panjang lengan 1 meter dan parameter gelombang yang digunakan, didapatkan simpangan bandul yang lebih baik ketika menggunakan massa beban 100 kg kecuali pada kondisi amplitudo gelombang 0.1 meter dengan periode 2.32 dan 7 s. Sedangkan dengan panjang lengan 1.25 meter dan parameter gelombang yang digunakan, didapatkan simpangan bandul yang lebih baik ketika menggunakan massa beban 152 kg kecuali pada kondisi amplitudo gelombang 0.1 meter dengan periode 7 dan 12 s. Jadi karakter ketika pada parameter gelombang yang cenderung lebih tenang didapatkan nilai simpangan yang lebih tinggi ketika menggunakan massa beban 100 kg khususnya ketika menggunakan panjang lengan 1.25 meter. Ketika menggunakan panjang lengan 1.5 meter dan parameter gelombang yang digunakan, didapatkan simpangan bandul yang lebih baik ketika menggunakan massa beban 100 kg untuk periode gelombang 2.32 s pada semua variasi amplitudo gelombang. Untuk variasi periode lainnya simpangan pendulum didapatkan lebih baik ketika menggunakan massa beban pendulum 152 kg. Untuk simpangan pendulum terbaik rata - rata didapatkan ketika menggunakan panjang lengan pendulum 1.25 meter nilai ini terlihat ketika menggunakan parameter amplitudo gelombang yang kecil yaitu untuk amplitudo 0.1 dan 0.35. Sedangkan untuk amplitudo gelombang 0.60 meter hasil terbaik rata - rata didapatkan pada panjang lengan pendulum 1 dan 1.5 meter. Hal ini terjadi karena pada panjang gelombang 0.60 meter kurang bisa melakukan ekstraksi energi karena panjangnya ponton. Untuk variasi massa beban didapatkan nilai simpangan terbaik rata - rata ketika menggunakan massa 100 kg ketika pada gelombang dengan amplitude 0.1 dan 0.35 meter sedangkan ketika amplitudo 0.60 meter hasil simpangan pendulum terbaik ketika menggunakan massa beban 152 kg.
23
2.3.3
Efek Bentuk Hull terhadap Prouduksi Energi PLTGLSetelah didapatkan bentuk ponton yang menghasilkan RAO terbesar dan panjang lengan dengan simpangan paling baik. Selanjutnya pada simulasi tahap ketiga ini dilakukan simulasi dengan variasi bentuk hull pada ponton katamaran untuk mengetahui respon simpangan yang dihasilkan oleh pendulum dengan menggunakan panjang pendulum terbaik dari hasil simulasi tahap kedua. Simulasi dilakukan dengan panjang lengan pendulum 1,25 meter, massa 100 dan 150 kg, periode gelombang 2,32 ; 7 dan 12 sekon serta amplitudo gelombang 0,1;0,35 dan 0,6 meter. Berikut adalah hasil simulasi pada variasi amplitudo 0,1 meter dapat dilihat pada Gambar 16-21.
Gambar 28. Perbandingan simpangan pendulum pada ponton katamaran saat T 2,32 sekon, dan massa 100 kg
Gambar 28 merupakan grafik simpangan pendulum pada saat ponton dikenai periode gelombang 2,32 sekon dan massa beban 100kg. Sedangkan Gambar 29 merupakan grafik simpangan pendulum saat periode yang sama namun dengan massa beban 150kg. Berdasarkan kedua grafik
tersebut dapat diketahui bahwa perubahan simpangan pendulum yang terjadi memiliki trendline yang
hampir sama. Nilai simpangan pada ponton katamaran simetris dengan outer flat hull memiliki
perbedaan simpangan yang cukup kecil. Pada saat lengan pendulum diberikan beban 100 kg nilai simpangan terbesar terjadi pada ponton katamaran simetris. Tetapi saat lengan pendulum diberikan
beban 150 kg nilai simpangan terbesar terjadi pada ponton katamaran outer flat hull dengan selisih
yang cukup kecil dari nilai simpangan maksimum ponton katamaran simetris. -80 -60 -40 -20 0 20 40 60 80 0 10 20 30 40 50 60 S im pa ng an Pen du lu m (⁰ ) Time (s)
m=100kg T=2,32s
24
Gambar 29.Perbandingan simpangan pendulum pada ponton katamaran saat T 2,32 sekon dan
massa 150 kg
Gambar 30. Perbandingan simpangan pendulum pada ponton katamaran saat T 7 sekon dan massa 100 kg.
Gambar 30 menunjukkan grafik perubahan simpangan yang terjadi pada ponton dengan periode gelombang 7 sekon dan massa beban 100kg. Dari grafik tersebut dapat diketahu bahwa nilai
simpangan terbesar terjadi pada ponton dengan bentuk outer flat hull. Kondisi ini berbeda dengan
pada saat ponton dikenai periode gelombang 2,32 sekon dimana perbedaan antara ponton katamaran
simetris dengan katamaran outer flat hull memiliki nilai perbedaan yang cukup kecil. Jika dilihat
pada grafik simpangan pendulum dengan massa beban 100 kg dengan periode gelombang 7 sekon
perbedaan antara simpangan pada ponton katamaran simetris dengan ponton katamaran outer flat
hull sangat jauh. Tetapi memiliki perbedaan yang cukup kecil dengan ponton katamaran inner flat
-80 -60 -40 -20 0 20 40 60 80 0 10 20 30 40 50 60 S im pa ng an Pen du lu m (⁰ ) Time (s)
m=150kg T=2,32s
Outer Flat Hull Inner Flat Hull Simetris
-100 -80 -60 -40 -20 0 20 40 60 80 100 0 10 20 30 40 50 60 S im pa ng an Pen du lu m (⁰ ) Time (s)
m=100kg T=7s
25
hull.Hal yang sama juga terjadi pada ponton dengan massa beban pendulum 150kg saat dikenai
periode 7 sekon. Dari Gambar 31 tersebut dapat dilihat bahwa simpangan terbesar juga terjadi pada
ponton katamaran outer flat hull.
Gambar 31. Perbandingan simpangan pendulum pada ponton katamaran saat T 7 sekon dan massa
150 kg.
Gambar 32.Perbandingan simpangan pendulum pada ponton katamaran saat T 12 sekon dan massa
100 kg.
Gambar 32 menunjukkan grafik perubahan simpangan yang terjadi pada ponton dengan periode gelombang 12 sekon dan massa beban 100kg. Dari grafik tersebut dapat diketahu perubahan simpangan pada ponton katamaran simetris awalnya sangat kecil jika dibandingkan dengan ponton
katamaran outer flat hull yang memiliki perubahan simpangan cenderung konstan dari awal
-150 -100 -50 0 50 100 150 0 10 20 30 40 50 60 S im pa ng an Pen du lu m (⁰ ) Time (s)
m=150kg T=7s
Outer Flat Hull Inner Flat Hull Simetris
-80 -60 -40 -20 0 20 40 60 80 100 0 10 20 30 40 50 60 S im pa ng an Pen du lu m (⁰ ) Time (s)
m=100kg T=12s
26
pergerakan ponton. Namun pada saat ponton bergerak di detik 43 sekon perubahan simpangan pada
ponton katamaran simetris menjadi lebih besar jika dibandingkan dengan ponton katamaran outer
flat hull. Simpangan maksimum pada variasi ini terjadi pada ponton katamaran simetris. Hal yang
berbeda terjadi pada ponton dengan massa beban pendulum 150kg saat dikenai periode 7 sekon. Dari
Gambar 33 tersebut dapat dilihat bahwa simpangan terbesar terjadi pada ponton katamaran outer flat
hull.
Gambar 33. Perbandingan simpangan pendulum pada ponton katamaran saat T 12 sekon dan massa
150 kg.
Berdasarkan dari grafik pada Gambar 28-33 tersebut dapat diketahui bahwa untuk variasi periode 2,32 massa 100kg dan 150kg serta 12 sekon massa beban 100kg nilai simpangan yang trejadi
pada ponton katamaran simetris lebih besar jika dibandingkan dengan ponton katamaran outer flat
hull dan inner flat hull. Sedangkan pada variasi periode 7 sekon massa 100kg dan 150kg serta periode
12 sekon massa 150kg dengan amplitudo gelombang 0,1 meter memiliki perubahan nilai simpangan
maksimum pada ponton katamaran outer flat hull. Untuk kondisi ketika dilakukan simulasi
menggunakan variasi amplitudo gelombang 0,35 meter dan 0,6 meter nilai simpangan terbesar rata-rata terjadi pada ponton katamaran simetris. Sehingga dari simulasi tahap ketiga ini dapat disimpulkan bahwa ponton yang dapat menghasilkan nilai simpangan paling besar adalah ponton katamaran simetris.
1.4
Fabrikasi Ponton dan Sistem Kerangka BandulBerdasarkan hasil simulasi yang telah dilakukan, diketahui bahwa ponton simetris mampu menghasilkan simpangan pendulum yang cenderung hampir sama dengan ponton outer flat hull, namun pendulum yang ditempatkan pada tonton simteris memiliki periode getaran yang cenderung lebih singkat jika dibandingkan dengan ponton katamaran lainnya. Sehingga untuk penelitian ini
-80 -60 -40 -20 0 20 40 60 80 0 10 20 30 40 50 60 S im pa ng an Pen du lu m (⁰ ) Time (s)
m=150kg T=12s
27
akan menggunakan ponton katamaran simteris. Alasan lain yang mendasari hal pemilihan ponton ini adalah karena ponton jenis katamaran simetris ini lebih mudah untuk di fabrikasi. Setelah desain
ponton terbaik ditentukan, maka selanjutnya adalah melakukan pembuatan Design Engineering
Drawing (DED) yang merupakan acuan dalam melakukan proses fabrikasi. DED yang dibuat
meliputi DED sistem ponton dan pendulum, sistem mekanik dan sistem elektrik.
Fabrikasi ponton dilakukan di salah satu workshop di Sidoarjo, Jawa Timur. Ponton untuk
PLTGL-Multi Pendulum dibuat dengan menggunakan bahan fiberglass. Bahan ini dipilih karena kuat, tahan terhadap korosi dan memiliki harga yang lebih murah jika dibandingkan dengan bahan yang lain. Ponton dan sistem mekanik yang telah di fabrikasi ditunjukkan pada Gambar 34-35.
28
(a) (b)
Gambar 35. Proses fabrikasi (a). Lengan pendulum; (b). Kerangka pendulum
1.5
Fabrikasi dan Assembly Sistem MekanikSistem mekanik berfungsi untuk mentransmisikan energi kinetic pendulum menjadi
energi poros untuk di sambungkan dengan generator. Sistem mekanik ini harus didesain
sehingga rpm yang dihasilkan oleh PLTGL Multi Pendulum sesuai dengan spesifikas
i generator dan sistem elektrik yang digunakan. Gerakan pendulum merupakan gerakan
dua arah, sehingga sistem mekanik menggunakan jenis
one-way bearing
untuk
mengakomodasi gerakan pendulum. Dengan
one-way bearing
maka sistem poros akan tetap
berputar searah walaupun pendulum bergerak dua arah. Sistem
one-way bearing
yang
digunakan untuk PLTGL Multi Pendulum dapat dilihat pada Gambar 36
.
29
Proses fabrikasi dilakukan sesuai dengan desain yang telah dibuat sebelumnya. Masing-masing bagian dari sistem mekanik dibuat dengan ukuran yang tepat. Setelah proses fabrikasi, dilanjutkan dengan proses assembly dan fitting. Pada proses ini masing-masing bagian sistem mekanik yang sudah dibuat dirakit menjadi satu kesatuan. Dilakukan pengujian kinerja sistem mekanik untuk memastikan bahwa masing-masing bagian dapat bekerja dengan baik. Proses-proses ini ditunjukkan pada Gambar 37.
a. b.
c. d.
Gambar 37. a. Bearing untuk PLTGL Multi Pendulum, b. Sistem mekanik yang telah dirakit,
c. Proses assembly dan fitting, d. Sistem mekanik PLTGL
30
1.6
Pembuatan SLD untuk Sistem ElektrikSistem elektrik untuk PLTGL Multi Pendulum ditunjukkan pada Gambar 38. Sistem
konversi pada PLTGL Multi Pendulum menggunakan sistem transmisi yang didesain
khusus sehingga tidak menyebabkan kendalan ketika dipasang ke generator. Generator
yang digunakan pada PLTGL Multi pendulum merupakan
Generator low
RPM dengan
kapasitas 1000W 3 Fasa 220 V. Penggunaan generator
low
RPM ini karena menyesuaikan
dengan karakteristik dari gerakan pendulum yang memiliki RPM yang rendah.
Gambar 38. Single Line Diagram
Sistem perubahan tegangan generator PMG 3 fasa menggunakan instrumen daya
rectifier
,
Maximum Power Point Tracking
(MPPT) dan
inverter on grid
.
Rectifier
merupakan penyearah yang berfungsi merubah tegangan AC menjadi DC. Tegangan DC
dari
rectifier
akan di stabilkan oleh
regulator
agar dapat diterima sebagai
input inverter
.
Skema sistem perubahan tegangan dijelaskan sebagai berikut:
o
Generator PMG memiliki
output
tegangan AC, serta berubah ubah akibat adanya
perubahan rpm dari konversi putaran pendulum hingga transmisi mekanik dan
beban listrik.
o
Rectifier
adalah rangkaian semikonduktor yang merubah tegangan AC menjadi DC
agar dapat distabilkan, karena tegangan generator belum dapat diterima beban.
o
Regulator
berfungsi menurunkan atau menaikan tegangan sesuai
input inverter
(pada umumnya
input inverter on grid
200-350 Vdc).
o
Inverter
berfungsi untuk merubah tegangan DC menjadi AC sehingga tegangan
menjadi 220-240 Vac 1 fasa dan frekuensi 50-60 Hz.
Kenaikan rpm linier terhadap kenaikan tegangan
output generator
, frekuensi
output
generator, dan tegangan
output rectifier
. Sedangkan pada
regulator
dan
inverter
tidak
mengalami perubahan terhadap nilai rpm. Penambahan beban linier berbanding terbalik
31
terhadap
output
tegangan (
generator, rectifier, regulator,
dan
inverter
) serta frekuensi
generator. Semakin besar beban semakin turun nilainya.
32
BAB II
STATUS LUARAN
Penelitian pengambangan PLTGL-Multi Pendulum ini direncanakan untuk dilaksanakan selama 2 (dua) tahun. Secara umum penelitian yang telah dilakukan ini telah mencapai target penelitian mencapai 100%, dimana telah dilakukannya desain dan perhitungan PLTG-Multi Pendulum, pembuatan DED, fabrikasi ponton, krangka dan komponen mekanik serta pelaksanaan seminar international. Secara lebih detail, status luaran sampai saat ini ditunjukkan oleh Tabel 3.
Tabel 3. Status Luaran Penelitian
No Luaran Status Keterangan/Dokumentasi
1. Perhitungan dan DED PLTGL (Ponton dan system pendulum)
a. Simulasi Ponton
dan Sistem
Pendulum
Selesai Simulasi ini dibagi menjadi beberapa tahap,
diantaranya:
a. Penentuan jenis ponton
b. Penentuan efek ukuran pendulum terhadap simpangan pendulum
c. Efek bentuk hull terhadap simpangan pendulum
Simulasi dilakukan dengan menggunakan
33
No Luaran Status Keterangan/Dokumentasi
b. Pembuatan DED
PLTGL
Selesai DED dibuat dengan pertimbangan utama berdasarkan
hasil simulasi yang dilakukan. DED yang dibuat meliputi:
a. DED sistem ponton dan kerangka
34
No Luaran Status Keterangan/Dokumentasi
c. DED sistem elektrik / SLD
2. Purwarupa berupa
ponton dan system
multi pendulum
Pembangkit Listrik Tenaga Gelombang Laut (PLTGL)
Selesai Purwarupa ponton dibuat berdasarkan DED yang telah
dibuat sebelumnya. Material Fiber dipilih untuk pembuatan ponton. Sementara itu kerangka turbin dibuat dengan menggunakan material besi yang di
coating sesuai dengan standard marine used.
3. Pembuatan Draft Selesai Publikasi akan dilakukan dalam The 5th International
Tropical Renewable Energy Conference 2020 yang
35
No Luaran Status Keterangan/Dokumentasi
4 Fabrikasi dan
assembly sistem mekanik
Selesai Berikut merupakan komponen-komponen mekanik
dan komponen yang sudah di assembly. Desain sistem
mekanik disesuaikan dengan kebutuhan PLTGL Multi Pendulum
36
No Luaran Status Keterangan/Dokumentasi
5 Pelaksanaan Seminar
International bereputasi
Selesai Pelaksanaan seminar internasional bereputasi telah
selesai dilaksanakan pada tanggal 29-30 Oktober 2020
dalam The 5th International Tropical Renewable
Energy Conference 2020 (iTREC)
38
BAB III
KENDALA PELAKSANAAN PENELITIAN
Berikut ini merupakan beberapa kendala yang dihadapi tim selama proses pelaksanaan penelitian ini, diantaranya
a. Proses fabrikasi yang terkendala adanya kondisi pandemic. Hal ini menyebabkan adanya
pembatasan jumlah pekerja dan jam kerja di workshop mitra sehingga proses fabrikasi memerlukan waktu yang lebih lama.
b. PLTGL – Multi pendulum ini di desain untuk dapat diimplementasikan secara modular dan
harus mampu bersaing dengan sumber energi konvensional yang saat ini banyak digunakan, seperti dari diesel/genset. Oleh karena itu, penentuan material ponton, sistem pendulum dan sistem mekanik yang harus tahan dalam kondisi lingkungan yang ekstrim (lingkungan laut) namun harus mempertimbangkan faktor biaya, sehingga tetap dapat bersaing dengan sumber energi lainnya.
c. Penentuan lokasi pengujian yang memiliki potensi energi laut baik namun mudah untuk
dijangkau, sehingga mobilitas dari barang dan tim peneli lebih mudah dilakukan. Mengingat kondisi pandemic ini, maka hal tersebut menjadi salah satu hal penting yang harus diperhatikan Berikut merupakan langkah yang diambil untuk mengatasi kendala tersebut, diantaranya
a. Fabrikasi dilakukan secara parallel antara pembuatan ponton dan kerangka pendulum. Selain
itu, fabrikasi telah dilakukan lebih awal sehingga proses fabrikasi bisa selesai tepat waktu. Walaupun dalam kondisi pandemik ini, fabrikasi tetap dilakukan dengan memperhatikan protokol Kesehatan yang berlaku
b. Untuk pembuatan ponton, material fiber glass dipilih karena memiliki ketahanan yang baik pada
kondisi lingkungan yang ekstrim, selain itu material ini memiliki harga yang cukup terjangkau. Tidak perlu cat anti korosi untuk ponton, karena ponton dibuat bari material fiber glass. Sementara itu, sistem mekanik dibuat dari bahan yang memang mudah terkorosi, namun demikian dibuat chasing untuk sistem mekanik sedemikian sehingga sistem mekanik dapat terlindung dari air laut.
c. Saat ini tim masih melakukan survey dan kajian mengenai lokasi-lokasi yang potensial untuk
40
BAB IV
RENCANA TAHAPAN SELANJUTNYA
Setelah pelaksanaan penelitian pada tahap 1 di tahun 2020, berikut merupakan rencana tahapan selanjutnya di tahun 2021:
a. Integrasi komponen elektrik ke sistem.
Fabrikasi dan assembly untuk sistem ponton, pendulum dan sistem mekanik telah selesai dilakukan. Saat ini sedang dilakukan proses fitting untuk komponen-komponen tersebut. Sementara itu, sistem elektrik telah selesai didesain, sehingga tahapan selanjutnya yang harus dilaksanakan adalah melakukan pengadaan sistem elektrik, untuk selanjutnya diinstall ke PLTGL-Multi Pendulum.
b. Site test
Setelah semua komponen PLTGL Multi Pendulum terinstall, maka selanjutnya adalah
melakukan site-test atau pengujian lapangan PLTGL Multi Pendulum. Pengujian ini dilakukan
untuk mengetahui kinerja dari PLTGL Multi Pendulum di lingkungan sebenarnya
c. Studi kelayakan bisnis dan LRIP
Untuk menuju ke tahapan komersialisasi, maka dilakukan studi kelayakan bisnis dan Low
42
BAB V
DAFTAR PUSTAKA
[1]
H. Titah, "An Up-to-Date Technologies Review and Evaluation of Wave
Energy Converters,"
International Review of Electrical Engineering ,
vol. 10,
2015.
[2]
"An Overview of Ocean Energy Activities in 2018,"
Ocean Energy Systems
Annual Report,
p. 67, 2018.
[3]
P. F. E. F.-M. a. H. S. J.P Kofoed, "Prototype Testing of the Wave Energy
Converter Wave Dragon,"
Renew Energy,
Vols. 181-189, p. 31, 2006.
[4]
A. d. O. F. D.V. Evan, "Hydrodynamic of Ocean Wave Energy Utilization,"
Springer,
pp. 51-55, 1986.
[5]
I. R. H. Irfan.S.Arief, "Respon to Pontoon and Pendulum Motion at Wave
Energy Converter Based on Pendulum System,"
E3S Web of Conferences
43,01022 (2018),
2017.
[6]
J. K. a. G. Bhuyan, "Ocean Energy: Global Technology Development
Status,"
Report prepared by Powertech Labs for the IEA-OES (Implementing
Agreement on Ocean Energy Systems - International Energy Agency,
2009.
[7]
S. Said, Energi Outlook Indonesia, vol. 11, Jakarta Selatan: Dewan Energi
Nasional, 2014, p. 4.
[8]
J. Falnes, "A Review of wave Energy Extraction,"
Science Direct Marine
Structure,
vol. 20, pp. 185-201, 2007.
[9]
S. Junianto, Mukhtasor and R. W. Prastianto, "Motion Response Modeling
of Catamaran Type for Floating Tidal Current Energy Conversion System n
Beam Seas Condition," in
Proceedings of Academicsera 12th International
Conference
, Seoul, 2017.
43
[11]
Dewan Energi Nasional, Outlook Energi Indonesia 2019, Jakarta, 2019.
[12]
S. Said, "Energi Outlook Indonesia," Dewan Energi Nasional, Jakarta
Selatan, 2014.
[13]
A. Goldman, "Introduction to Wave Energy Converters," 28 Oktober 2012.
[Online]. Available: http://www.renewablegreenenergypower.com/introduction-
to-wave-energy-converters-wecs/. [Accessed 4 November 2019].
[14]
Kementrian Pendidikan dan Kebudayaan, Bangunan dan Stabilitas Kapal
Perikanan 1, 2015.
[15]
Y. B. Mustofa, "Analisa Gerakan Ponton Model Tripod untuk Energi
Gelombang Sistem Bandulan,"
Jurnal Teknik ITS,
vol. I, pp. 203-206, 2012.
[16]
A. Pecher and J. P. Kofoed, Handbook of Ocean Wave Energy, Aalborg:
44
45
LAMPIRAN 1 Tabel Daftar Luaran
Program
: Penelitian Unggulan ITS (Dasar Multidisiplin) Dana
Lokal ITS 2020
Nama Ketua Tim
: Dr. Ridho Hantoro, S.T.,M.T.
Judul
: Pengembangan dan Pengujian Lapangan (Site Test)
Pembangkit Listrik Tenaga Gelombang Laut
(PLTGL)-Sistem Multi Pendulum
1.Artikel Jurnal
No
Judul Artikel
Nama Jurnal
Status Kemajuan*)
*) Status kemajuan: Persiapan,
submitted
,
under review
,
accepted
,
published
2. Artikel Konferensi
No
Judul Artikel
Nama Konferensi
(Nama Penyelenggara,
Tempat, Tanggal)
Status Kemajuan*)
1.
Response Analysis of
Pendulum and Poonton on
Ocean Wave Energy
Conversion System
(OWCS)-Double Pendulum System
The 5th International Tropical Renewable Energy Conference (iTREC) 2020 (Faculty of Engineering, University of Indonesia, October 29th-30th 2020)
presented
*) Status kemajuan: Persiapan,
submitted
,
under review
,
accepted
,
presented
3. Paten
No Judul Usulan Paten
Status Kemajuan
*) Status kemajuan: Persiapan,
submitted
,
under review
4. Buku
No
Judul Buku
(Rencana) Penerbit
Status Kemajuan*)
*) Status kemajuan: Persiapan,
under review, published
46
No
Nama Output
Detail Output
Status Kemajuan*)
1.
Purwarupa dan DED dari
ponton Pembakit Listrik Tenaga
Gelombang Laut (PLTGL)
multi pendulum yang meliputi
DED ponton dan pendulum, dan
sistem mekanik
Purwarupa ponton dibuat berdasarkan DED yang telah dibuat sebelumnya.
Material Fiber dipilih
untuk pembuatan ponton. Sementara itu kerangka
turbin dibuat dengan
menggunakan material
besi yang di coating
sesuai dengan standard
marine used. Sementara
itu digunakan chasing yang mencegah korosi pada sistem mekanik
selesai
*) Status kemajuan: cantumkan status kemajuan sesuai kondisi saat ini
6. Disertasi/Tesis/Tugas Akhir/PKM yang dihasilkan
No Nama Mahasiswa
NRP
Judul
Status*)
1
Bariz Irfan Ridho
02311640000147 Analisa Respon
Gerak Multi
Pendulum
Vertikal dan
Ponton
Katamaran Pada
Pembangkit
Listrik Tenaga
Gelombang
Laut –Sistem
Bandul(PLTGL
–SB)”
Lulus
2
Yusuf Rifqi Hudaya
02311640000042 Analisa
Kestabilan
Variasi Susunan
Array pada
Ponton
Trimaran
Pembangkit
Listrik Tenaga
Gelombang
Laut Sistem
Lulus
47
Bandul
(PLTGL-SB)
3
Qoriatul Khasanah
02311640000038 Analisa Respon
Gerak Ponton
Multi Pendulum
Model Trimaran
Pada
Pembangkit
Listrik Tenaga
Gelombang
Sistem Bandul
(PLTGL - SB)
Lulus
48
LAMPIRAN 2 MANUSCRIP CONFERENCE
Response Analysis of Pendulum and Pontoon on Ocean
Wave Energy Conversion System (OWCS) – Double
Pendulum System
Ridho Hantoro
1, a)Erna Septyaningrum
1,b)Bariz Irfan Ridho
,c) 1Department of Engineering Physics, Institut Teknologi Sepuluh Nopember, Surabaya, Indonesiaa)Corresponding author: [email protected] b)[email protected] bariz
Abstract. The growing energy need, and the limitation of fossil fuel encourage many researchers to develop renewable energy technology. The good availability and the environmentally friendly of renewable energy, make it to be the best choice for energy production. One of the renewable energy sources comes from the sea, ocean wave energy has the potential to be extracted sustainably. Devices that convert ocean energy into electrical energy are called Ocean Wave Energy Conversion System (OWCS). This work proposed the new technology of OWCS, known as OWCS-Double Pendulum. The analysis of catamaran pontoon dan pendulums was carried out by utilizing the Computational Fluid Dynamics method. The numerical analysis shows that the smaller the wave period value, the greater the pontoon pitching value. The wave (amplitude and period) and pendulum (length and mass) parameters were variated to know the pendulum response toward the design parameter. Meanwhile, the greater the wave amplitude value, the greater the pontoon pitching value. The largest pontoon pitching value was obtained when using the 2.32 s wave period with a pitching value of 5.51°. When using a 2.32 s period and an amplitude of 0.6, the pitching pontoon value was 23.81°. When using the ocean wave period 2.32 s and the ocean wave amplitude 0.1 m, the largest pendulum deviation value is obtained when using a pendulum arm length variation of 1.25 m with a value of 109.57°. When using the variation of wave period 12 s and wave height 0.1 m, the pendulum deviation value is higher when using a load mass of 100 kg with a value of 61.7°.
INTRODUCTION
The energy demand continues growing along with the increasing human population growth in Indonesia. According to the General Planning for National Energy, Indonesia produced 382.9 MTOE and consumed 110.5 MTOE in 2017 [10]. Meanwhile, in 2018, the energy production was 411.6 MTOE and the consumption was 114 MTOE [11]. The energy consumption in Indonesia increases by 3.5 MTOE every year. Nowadays, Indonesia facing the decrement of energy production especially in the petroleum sector, on the contrary, the demand for petroleum is increasing every year. As most of the electricity is produced by coal-fired power plants, Indonesia has a bid dependence on fossil fuel supply. Energy diversification is very urgently needed to reduce the dependency on fossil fuel.
Renewable energy technologies have been proposed as the solution of the issue since this is an environmentally friendly technology and the resource is abundantly available. Renewable energy technology is often site-specific technology, in which the implementation of the technology is based on the potential of the region. The three most developed marine energies are tidal energy, wave energy, and ocean thermal energy. The ocean wave energy conversion system (OWCS) is the most attractive to be exploited sustainably [12].
The development of OWCS was a worldwide project. America, Europe, China, and India are at the forefront of developing strategies to increase the share of an ocean wave in their energy mix [4,5]. Researchers had proposed many concept and design of wave energy conversion. There are three main categories of OWCS, i.e. (1) Oscillating Water Columns (OWCs), (2) Oscillating Bodies, and (3) overtopping system. OWCS is characterized by the interaction of the device and the ocean wave. The challenges for OWCS ranging from the availability of suitable wave and the survivability of the material in the severe environmental condition, [6,7].
![Gambar 2. Instalasi PLTGL [1].](https://thumb-ap.123doks.com/thumbv2/123dok/4120836.2814649/15.892.198.710.670.1075/gambar-instalasi-pltgl.webp)