SISTEM SRUKTUR DENGAN SATU DERAJAT KEBEBASAN
SISTEM SRUKTUR DENGAN SATU DERAJAT KEBEBASAN
(
(
((
SINGLE DEG
SINGLE DEGREE OF FREE
SINGLE DE
SINGLE DEGREE OF FR
GREE OF FREEDOM SY
REE OF FREEDOM SYS
EEDOM SYSTEM – SD
DOM SYSTEM – SDO
STEM – SDOF
TEM – SDOF
OF
F
))
)
)
2.
2.11.. PPEENDNDAAHUHULLUAUANN
Sistem struktur dengan satu derajat kebebasan (
Sistem struktur dengan satu derajat kebebasan ( single single degree degree of of freedom freedom systemsystem, SDOF),, SDOF), seca
secara ra skeskematmatis is ditditunjunjukkukkan an padpadaa Gambar 2.1Gambar 2.1. Sistem ini terdiri dari massa (. Sistem ini terdiri dari massa (mm) yang) yang dip
dipusatusatkan kan padpada a tittitik ik puspusat at masmassa sa lanlantaitai, , ranrangka gka (( frame frame) ) yanyang g memmemberberikaikan n kekkekakuakuanan (( stiffness stiffness,, k k ) ) papada da sisistestem m dadan n redredamamanan viscousviscous ((viscous damping viscous damping ,, cc) yang mendisipasi) yang mendisipasi energi getaran dari sistem.
energi getaran dari sistem.
((aa)) Beban Luar Beban Luar ((bb)) Pergerakan T Pergerakan Tanahanah akibat Beban Gempa akibat Beban Gempa
Gam
Gambabar 2.1r 2.1 SisSistem Stem Strutruktuktur denr dengan Sgan Satu atu eraera!at "!at "ebeebebabasansan #Single egree of $reedom System%
#Single egree of $reedom System% S&$'S&$'
Sistem ini dapat diidealisasikan sebagai struktur satu lantai (
Sistem ini dapat diidealisasikan sebagai struktur satu lantai (one(story structureone(story structure). Setiap). Setiap elemen struktur (balok, kolom, dinding) memberikan sifat-sifat khusus struktur, yaitu sifat elemen struktur (balok, kolom, dinding) memberikan sifat-sifat khusus struktur, yaitu sifat inersia (massa,
inersia (massa,mm), sifat elastis (kekakuan,), sifat elastis (kekakuan, k k ) dan sifat energi disipasi (redaman,) dan sifat energi disipasi (redaman, cc).).
Dalam analisa dinamis, jumlah perpindahan bebas yang diperlukan untuk menentukan Dalam analisa dinamis, jumlah perpindahan bebas yang diperlukan untuk menentukan perpindahan
perpindahan posisi posisi seluruh seluruh massa massa terhadap terhadap pasisi pasisi aslinya aslinya dinamakan dinamakan jumlah jumlah derajatderajat kebebasan (
kebebasan (degree of freedomdegree of freedom,, &$ &$ ).).
O Ossccaarr MM ((113322 252588 556644)) IIII –– 11 cc ) ) m m kk**22 kk**22 $ $ ((t t )) ) ) g g cc kk**22 kk**22 m m ) ) ) )t t
ntuk lebih jelasnya, jika struktur hanya mempunyai satu derajat kebebasan (misalnya ntuk lebih jelasnya, jika struktur hanya mempunyai satu derajat kebebasan (misalnya latera
lateral l displdisplacemenacement t ) dan massa struktur terpusat pada satu lokasi (biasanya pada titik ) dan massa struktur terpusat pada satu lokasi (biasanya pada titik pusat
pusat massa massa lantai), lantai), maka maka sistem sistem struktur struktur tersebut tersebut merupakan merupakan sistem sistem dengan dengan satu satu derajatderajat kebebasan (
kebebasan ( single degree of fr single degree of freedom systemeedom system,,S&$ S&$ ).).
!engaruh dinamis yang bekerja pada struktur dapat disebabkan oleh " !engaruh dinamis yang bekerja pada struktur dapat disebabkan oleh "
#
#.. $$eebbaan n lluuaar r %% $ $ ((t t )&)&, , yayaititu u bebebaban n luluar ar yayang ng bebekekerjrja a papada da ststruruktktur ur yayang ng bebesarsarnynyaa berubah-ubah menurut fungsi 'aktu
berubah-ubah menurut fungsi 'aktu .
. !er!ergerakagerakan tanah yann tanah yang ditimg ditimbulkan obulkan oleh gempleh gempa %a % ) )((t t )&)&
2.2
2.2.. FOFORMURMULASLASI I PEPERSARSAMAMAAN AN GERGERAK AK (( EQUA EQUATION OF MOTITION OF MOTION ON ))
Dalam analisa dinamis, respon struktur terhadap pembebanan dinamis terbagi dalam tiga Dalam analisa dinamis, respon struktur terhadap pembebanan dinamis terbagi dalam tiga gaya, yaitu "
gaya, yaitu "
1.
1. GaGaya Iya Inenersrsa (a ( Inertia Force Inertia Force!!F F i i ))
aya inersia ini timbul akibat struktur mempunyai massa (aya inersia ini timbul akibat struktur mempunyai massa (massmass,, mm) dan percepatan) dan percepatan ((accelerationacceleration,,aa).).
Dalam analisa dinamis, gaya inersia didefinisikan sebagai perkalian antara massaDalam analisa dinamis, gaya inersia didefinisikan sebagai perkalian antara massa struktur dengan percepatan str
struktur dengan percepatan struktur, atau "uktur, atau " $ $ ii ( (t t )) ** mm . . aa $ $ ii ( (t t )) ** mm dt dt t t ) ) d d (( )) ... ... ((2.2.12.2.1)) $ $ ii ( (t t )) ** mm ) )
((t t )) ...... ((2.2.22.2.2)) dimana " dimana " mm * * massa massa struktur struktur %kg %kg + + ton ton + + -dt-dtm&m& )
) ( (t t )
)
* * percepatan percepatan struktur struktur menurut menurut fungsi fungsi 'aktu 'aktu %mdt%mdt&&2.
2. GaGaya Rya Re"e"a#a#an (an ( Damping Force Damping Force!!F F d d ))
Dalam redaman, energi dari sistem getaran didisipasi oleh bermacam mekanisme,Dalam redaman, energi dari sistem getaran didisipasi oleh bermacam mekanisme, seperti gesekan (
seperti gesekan ( friction friction) pada sambungan baja, pembukaan dan penutupan retak ) pada sambungan baja, pembukaan dan penutupan retak kec
kecil il padpada a betbeton, on, gesgesekaekan n antantara ara elemelemen en strustruktuktur r dendengan gan nonnon-str-struktuktur ur (di(dindindingng partisi).
partisi).
O
$esarnya koefisien redaman pada sistem S&$ dipilih sedemikian rupa, sehingga
energi getaran yang didisipasi sebanding atau ekialen dengan energi disipasi pada seluruh mekanisme redaman untuk struktur yang sebenarnya, yang disebut koefisien redamanviscous (viscous damping coefficient ).
aya redaman ini timbul akibat respon struktur mengabsorbsimendisipasi energi
yang diberikan oleh beban luar. aya redaman ini yang mengakibatkan struktur berhenti berespon pada 'aktu t tertentu.
Dalam analisa dinamis, gaya redaman didefinisikan sebagai fungsi kecepatan
struktur terhadap koefisien redaman viscous linear (c), atau "
$ d (t ) * c dt t d)( ) ... (2.2.+) $ d (t ) * c )
(t ) ... (2.2.,) dimana "c * koefisien redamanviscous linear %-dtm&
) (t
)
* kecepatan struktur menurut fungsi 'aktu %mdt&$. Gaya S%a%s ( Static Force!F s)
aya statis ini timbul akibat simpangan atau deformasi struktur.
Dalam analisa dinamis, gaya statis didefinisikan sebagai perkalian antara kekakuan
struktur (k ) dengan perpindahan atau simpangan struktur ( )), atau "
$ s (t ) * k )(t ) ... (2.2.-)
dimana "
k * konstanta pegaskekakuan struktur %m + mm&
)(t ) * perpindahan struktur menurut fungsi 'aktu %mm&
Dalam analisa dinamis, beban luar yang bekerja pada struktur merupakan beban dinamis (beban yang berubah-ubah menurut fungsi 'aktu), yang dinyatakan dalam notasi $ (t ).
!ersamaan gerak sistem S&$ akibat beban luar yang bekerja pada pusat massa struktur, dapat diperoleh sebagai berikut "
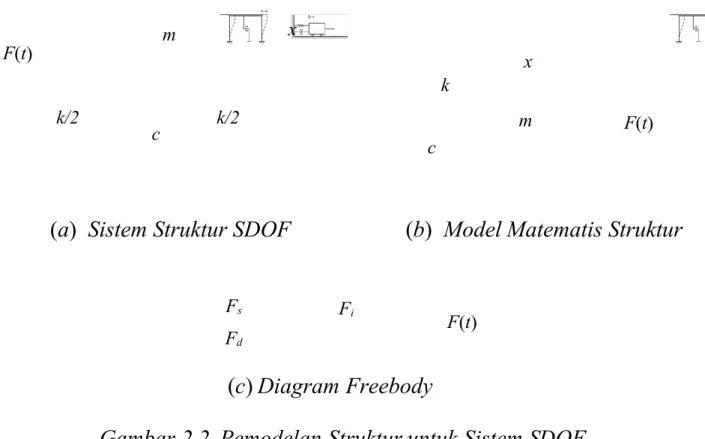
(a) Sistem Struktur S&$ (b) odel atematis Struktur
(c) iagram $reebody
Gambar 2.2 Pemodelan Struktur untuk Sistem S&$
Dari diagram freebody pada Gambar 2.2, diperoleh persamaan kesetimbangan dinamis sebagai berikut " $ i / $ d / $ s * $ (t ) m
& c
& ! ' F (t ) ... (2.2./ ) atau " 2 2 dt d m & dt d c & ! ' F (t ) ... (2.2.0 )!ers. 2.2./ dan !ers. 2.2.0 adalah persamaan differensial linear orde dua yang merupakan "ersamaan Gera! Dinamis Sr#!t#r #nt#! Sistem Str#!t#r dengan Sat# Dera$at %e&e&asan 'Sing(e Degree o) Freedom S*stem+ SDOF,
Oscar M (132 258 564) II – 4 $ (t ) $ d $ i $ s $ (t ) ) m c k*2 k*2 $ (t ) c ) m k
Secara umum, persamaan gerak dinamis struktur untuk sistem single degree of freedom
(S&$', dapat dikelompokkan sebagai berikut "
Gambar 2.+
Persamaan Gerak inamis Struktur untuk Sistem dengan Satu era!at "ebebasan #Single egree of $reedom System% S&$'
2.$. GERAK BEBAS TANPA REDAMAN (UNDAM"ED FREE -I.RATION )
Dalam analisa dinamis, suatu sistem struktur S&$ dikatakan berada dalam keadaan gerak bebas tanpa redaman (undamped free vibration), jika sistem struktur yang ditinjau bebas
dari pengaruh gaya-gaya luar selama struktur tersebut bergerak atau bergetar ( $ (t ) * 0) dan redaman pada struktur diabaikan (c * 0).
Oscar M (132 258 564) II – 5 Gera Beas (Free -i&ration) m
& c
& ! ' * Gera Pasa (Force -i&ration) m
& c
& ! ' Gera Dna#s S%r+%+r m
& c
& ! 'Gera Beas Tan,a Re"a#an (Undamped Free -i&ration)
m
& ! ' *Gera Beas Den-an Re"a#an ( Damped Free -i&ration)
m
& c
& ! ' *Gera Pasa Tan,a Re"a#an (Undamped Force -i&ration)
m
& ! ' F (t )Gera Pasa Den-an Re"a#an ( Damped Force -i&ration)
!ada kondisi ini, gerak pada struktur ditimbulkan karena adanya pengaruh atau kondisi yang disebut kondisi a'al (initial condition), berupa perpindahan dan atau kecepatan struktur pada saat a'al (t * 0), yaitu "
) 0 ( ) * )(t 0) ) 0 ( )
* )
(t 0) ... (2.+.1) !emodelan sistem struktur S&$ 1 gerak bebas tanpa redaman, dapat dilihat pada Gambar 2., berikut.Sistem Struktur S&$ dealisasi odel atematis
#ndamped $ree 3ibration' Struktur Struktur
Gambar 2., Sistem S&$ 4 Gerak Bebas Tanpa 5edaman #ndamped $ree 3ibration'
!ersamaan gerak struktur SDOF untuk kondisi gera! &e&as tanpa redaman (#ndamped )ree /i&ration), dapat ditulis dalam bentuk "
m
& ! ' * ... (2.+.2)!enyelesaian (solusi) dari persamaan gerak struktur S&$ untuk kondisi gerak bebas tanpa redaman (!ers. 2.+.2) adalah "
1(t ) ' B1 /s0t ... (2.+.+) atau " 2(t ) ' B2 sn0t ... (2.+.,) 2isalkan " ) ( # t ) * $# cos6t ) ( # t )
* 1 $#6 sin 6t ) ( # t )
* 1 $#6 cos 6t ... (2.+.-) Oscar M (132 258 564) II – 6 ) m k k ) m k m k )dengan mensubtitusikan !ers. 2.+.- kedalam !ers. 2.+.2, diperoleh " ) m
/ k) * 0 m (1 $# 6 cos 6t ) / k ($# cos 6t ) * 0 $# (1 m6 cos6t ) / $# (k cos6t ) * 0 (1m6 / k ) $ # cos6t * 0 ... (2.+./ ) * 0 0!ers. 2.+./ di atas mempunyai solusi, jika dan hanya jika " 1 m6 / k * 0 6 * m k 0 ' m ! %raddt& ... (2.+.0 )
!ers. 2.+.0 merupakan Fre!#ensi Nat#ra( Sistem ( Nat#ra( Fre1#enc*)
Dengan menggunakan !ers. 2.+.0 , maka !ers. 2.+.2 dapat juga ditulis dalam bentuk " ) m
/ k) * 0 )
/ m k )* 0
& 02 ' * ... (2.+.7)!ers.2.+.7 merupakan "ersamaan Gera! .e&as Tanpa Redaman &erdasar!an Fre!#ensi Nat#ra( Sistem.
3arena )# * $# cos 6t (!ers. 2.+.+) dan ) * $sin 6t (!ers. 2.+.,) merupakan penyelesaian
(solusi) dari persamaan gerak bebas tanpa redaman (!ers. 2.+.2 atau !ers. 2.+.7) dan karena persamaan differensial orde dua adalah linier, maka superposisi dari kedua solusi ini juga
merupakan solusi dari persamaan gerak bebas tanpa redaman, atau "
(t ) ' B1 /s 0t & B2 sn 0t ... (2.+.8)
!ers. 2.+.8 merupakan So(#si Um#m Gera! .e&as Tanpa Redaman.
.#!ti 2 )(t ) * $# cos6t / $ sin 6t ) (t )
* 1 $# 6 sin 6t / $6 cos 6t ) (t )
* 1 $#6 cos6t $6 sin 6t Oscar M (132 258 564) II – !maka "
)
/ 6 ) * 0 (1 $# 6 cos 6t $ 6 sin 6t ) / 6 ($#cos 6t / $ sin 6t ) * 0 1 $#6 cos6t
$6 sin 6t / $#6 cos 6t / $6 sin 6t * 0 0 * 0 333333333333 Ter&#!ti 44
ilai konstanta integrasi $# dan $ dapat diperoleh jika kondisi a9al (initial condition) sistem, yaitu perpindahan dan kecepatan struktur pada saat a'al (pada saat t * 0) telah ditentukan atau diketahui. ntuk kondisi a'al (initial condition) sistem "
) 0 ( ) * )o dan )
(0) * vo ... (2.+.1:) diperoleh " )(t ) * $# cos6t / $ sin 6t ) 0 ( ) * $#cos (0) / $ sin (0)...* )o B1 ' o ... (2.+.11) )
(t ) * 1 $#6 sin 6t / $6 cos 6t ) 0 ( )
* 1 $#6 sin (0) / $6 cos (0) * vo $6 * vo B2 ' 0 / / ... (2.+.12) Sehingga, !ers. 2.+.8 dapat ditulis dalam bentuk " (t ) ' / /s 0t &
0 //
sn 0t ... (2.+.1+)
!ers.2.+.1+ merupakan So(#si %5#s#s "ersamaan Gera! .e&as Tanpa Redaman+ #nt#! %ondisi A6a( Sistem (*) ' / dan
(*) ' //Dengan transformasi trigonometri sederhana, dapat dilihat bah'a bentuk ekialen dari !ers. 2.+.8 adalah "
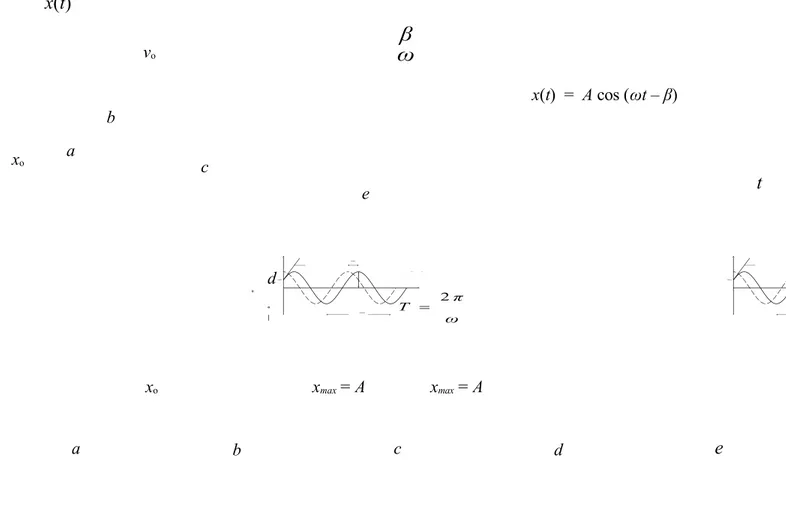
(t ) ' A /s (0t 0 7 ) ... (2.+.1,)
atau "
(t ) ' A sn (0t & 8) ... (2.+.1-)
dimana" A ' 2 / 2 / 0 / ... (2.+.1/ ) %an 7 ' / / 0 / + %an 8 ' 0 / / / ... (2.+.10 ) 3eterangan "
; * amplitudo (simpangan) maksimum , * beda sudut fase
.#!ti 2
2isalkan "
)(t ) * ; cos (6t 1 < )
* ; cos6t cos < / ; sin6t sin < * ; cos < cos 6t / ; sin < sin 6t
* $# cos 6t / $ sin 6t $# * ; cos <
$ * ; sin < $eda Sudut Fase ( < )
$# * ; cos < $ * ; sin < tan < * # ( $ $ < *
# ( # $ $ tan ... (2.+.17) 4mplitudo (4) $# * ; cos < $ * ; sin < $# / $ * ; (cos < / sin < ) $# / $ * ; ; * ( ( ( # $ $ ... (2.+.18) 5ika diketahui kondisi a'al (initial condition) sistem " ) 0 ( ) * )o dan )
(0) * vo Oscar M (132 258 564) II – "
2 / 2 / / A # ( $ $ cos sin
< ; < ; / //0 <diperoleh " ; * ( ( ( # $ $ ; * ( o ( o 6 v ) < * tan-# # ( $ $ < * tan-# o o ) 6 v
Dengan mensubtitusikan !ers. 2.+.1/ dan !ers. 2.+.10 kedalam !ers. 2.+.1, diperoleh " )(t ) * ; cos (6t 1 < ) (t ) ' 2 / 2 / 0 /
/ / 1 %an ./s 0 / 0t - ... (2.+.2:)!ers. 2.+.2: di atas juga merupakan So(#si %5#s#s "ersamaan Gera! .e&as Tanpa Redaman+ #nt#! %ondisi A6a( Sistem (*) ' / dan
(*) ' //6aktu yang diperlukan oleh sistem tanpa redaman untuk menyelesaikan satu siklus getarangerak bebas disebut "eriode Nat#ra( Getaran ( Nat#ra( "eriod o) -i&ration+ T ) "
T '
0 9 2
%detik& ... (2.+.21)
SedangkanFre!#ensi Nat#ra( Si!(#s Getaran ( Nat#ra( :*c(ic Fre1#enc* o) -i&ration+ ) ) dituliskan dalam bentuk "
) ' ;
1
%78 + raddtk + siklusdtk& ... (2.+.22)
7ubungan antara Fre!#ensi Nat#ra( S#d#t Getaran ( Nat#ra( :irc#(ar Fre1#enc* o) -i&ration+ 0) dengan Fre!#ensi Nat#ra( Si!(#s Getaran ( Nat#ra( :*c(ic Fre1#enc* o) -i&ration+ ) ) adalah " ) ' 9 0 2 %78& ... (2.+.21) atau " Oscar M (132 258 564) II – 1#
0 ' 2 9 ) %raddtk& ... (2.+.22)
0 dan ) disebut juga Fre!#ensi Nat#ra( Getaran ( Nat#ra( Fre1#enc* o) -i&ration).
Gambar 2.- 5espon Gerak Bebas Tanpa 5edaman
:ONTO< =3>
Diketahui suatu bangunan geser ( shear building ), seperti pada Gambar P2.1 berikut.
$angunan geser memikul beban = * #000,0 k. 3olom terbuat dari beton bertulang ber-dimensi 900 mm 900 mm dengan modulus elastisitas beton adalah > c * :;:0,0 2!a.
$alok mempunyai kekakuan yang tak hingga ( > * ). 4sumsikan bah'a massa balok dan kolom serta redaman pada struktur diabaikan.
Oscar M (132 258 564) II – 11 )o a )ma)? ; b c d e )ma)? ; Gambar P2.1
Bangunan Geser #Shear Building' = * #000 k 900 900 )(t ) @ * 9,0 m e b c a d 6 < t )(t ) 6 A T ( vo )(t ) * ; cos (6t 1 < ) )o
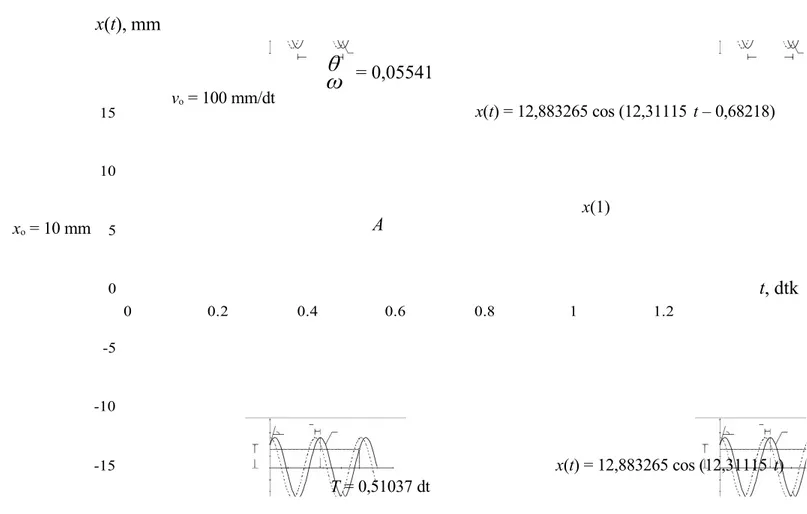
5ika persamaan respon sistem adalah )(t ) * ; cos (6t 1 ), dengan kondisi a'al (initial condition) sistem )(0) * #0,0 mm dan )
(0)* #00,0 mmdt, tentukan perpindahan dankecepatan sistem pada saat t * #,0 detik dan perpindahan maksimum sistem serta
gambarkan respon sistem yang terjadi.
SOLUSI 2
odel atematis Sistem
3arena tidak adanya beban luar yang bekerja pada struktur dan redaman pada struktur diabaikan serta perpindahan yang terjadi pada struktur hanyalah perpindahan lateral
(lateral displacement ), maka sistem struktur bangunan geser pada Gambar P2.1 di atas
dapat dimodelkan sebagai sistem dengan satu dera!at perpindahan 1 gerak bebas tanpa redaman (S&$ system 1 undamped free vibration).
Sistem Struktur S&$ dealisasi Struktur odel atematis Sistem
Persamaan Gerak Sistem
!ersamaan gerak sistem S&$ 4 gerak bebas tanpa redaman (undamped free vibration)
)
m
/ k) * 0 "ekakuan Sistem (k )
2omen <nersia 3olom ( k )
k * ## b h9 * ## (900 mm) (900 mm)9 * =,;: #0> mm? 3ekakuan Sistem (k ) k * k k *
9 #( @ >1 k * 9 > ) 0 , 9000 ( ) #0 ;: , = ( ) :;:0 ( # * #:?:0,0 mm Oscar M (132 258 564) II – 12 )(t ) m k k k k )(t ) m k m k )(t ) @ $rekuensi Catural Sistem(6) 2assa Sistem (m) m * = g * m-dt ># , @ k 0 , #000 * mmdt @>#0,0 #000000,0 #0#,@9=>0 -dtmm
$rekuensi Catural Sistem(6)
6 * m k * mm dt - @9=> , #0# mm 0 , #:?:0 #,9###: raddt
Periode Catural Sistem (T )
T * 6 A * #,9###:A rad-dt 0,:#09; dt 5espon Sistem
3arena respon sistem untuk sistem S&$ 4 gerak bebas tanpa redaman (undamped free vibration response) adalah "
)(t ) * ; cos (6t 1 )
maka, untuk kondisi a'al sistem (initial condition) "
) 0 (
) * )o * #0,0 mm dan )
(0) * vo * #00,0 mmdtdiperoleh " ;mplitudo Getaran( ;) ; * ( o ( o 6 v ) * 9###: , # 0 , #00 ) 0 , #0 ( #,>>9=: mm
Beda Sudut $ase Getaran( )
* tan-#
o o ) 6 * v * tan-# 0 , #0 9###: , # 0 , #00 * 0,=>#> rad 5espon Sistem S&$ 4 Gerak Bebas tanpa 5edaman
) (t ) * ; cos (6t 1 ) ) (t )
* 1 ; 6 sin (6t 1 ) Perpindahan dan "ecepatan Sistem pada saat t ? #,0 dt
Perpindahan sistem pada saat t ? #,0 dt
) (t ) * ; cos (6t 1 ) * #,>>9=: cos (#,9###: t 1 0,=>#>) maka " ) 0 , # ( ) * #,>>9=: cos %#,9###: (#,0) 1 0,=>#>& * #,>>9=: cos (##,=>@;) * ;,=:?= mm
"ecepatan sistem pada saat t ? #,0 dt
) (t )
* 1 ; 6 sin (6t 1 ) * 1 #:>,=0;>: sin (#,9###: t 1 0,=>#>) maka " ) 0 , # ( )
* 1 #:>,=0;>: sin %#,9###: (#,0) 1 0,=>#>) * 1 #:>,=0;>: sin (##,=>@;) * #;,>?#0? mmdt Perpindahan aksimum Sistem ( )ma))
!erpindahan atau simpangan maksimum sistem S&$ 1 gerak bebas tanpa redaman terjadi pada saat "
cos (6t 1 ) * # t * 6 B * 9###: , # =>#> , 0 * 0,0::?# dt dengan nilai simpangan maksimum "
)ma) * ;
* #,>>9=: mm
Gambar 5espon Sistem
5espon Sistem S&$ 4 Gerak Bebas tanpa 5edaman pada Dontoh 2.1
:ONTO< =3=
Suatu berat = * :0,; lb terpasang pada ujung bebas balok kantileer oleh pegas k .
!enampang balok kantileer berbentuk segiempat (tebal h * B in dan lebar b * #,0 in) dengan panjang L * #,: in dan modulus elastisitas balok > * 90 #0= lbin. 3ekakuan
pegas k * #0,=@ lbin. 2assa dan redaman pada balok diabaikan.
Centukan frekuensi natural sistem balok kantileer yang terdapat pada Gambar P2.2.
Penampang Balok
Gambar P2.2 Balok "antilever SOLUSI 2 Oscar M (132 258 564) II – 15 -#: -#0 -: 0 : #0 #: 0 0.( 0.? 0.= 0.> # #.( )o * #0 mm t , dtk )(t ), mm )(t ) * #,>>9=: cos (#,9###: t ) )(t ) * #,>>9=: cos (#,9###: t 1 0,=>#>) 6B * 0,0::?# ; T * 0,:#09; dt vo * #00 mmdt )(t ) L * #,: in )(#) = k B in # in
odel atematis Sistem
!erpindahan yang terjadi pada balok kantileer ada dua, yaitu perpindahan akibat lenturan balok ( )#) dan perpindahan akibat perpanjangan pegas ( )). $erarti, struktur
balok kantileer pada Gambar P2.2 merupakan sistem struktur dengan banyak derajat kebebasan (multi degree of freedom system, &$ ). Cetapi, struktur ini dapat dianggap sebagai sistem S&$ dengan menentukan suatu nilai kekakuan ekialen sebagai pengganti nilai kekakuan balok dan kekakuan pegas.
3arena tidak ada beban luar yang bekerja dan redaman pada struktur diabaikan, maka struktur balok kantileer tersebut berada dalam kondisi gerak bebas tanpa redaman
(undamped free vibration).
Balok kantilever
eformasi pada balok kantilever
&$ odel S&$ odel
odel atematis
Persamaan Gerak Sistem
!ersamaan gerak untuk sistem S&$ 4 gerak bebas tanpa redaman (undamped free vibration) adalah " ) m
/ k) * 0 "ekakuan Balok (k b) Oscar M (132 258 564) II – 16 k b L * #,:0 in )(t ) = k L * #,:0 in )(t ) = k k b )# ) )# k b ) k k m m )(t ) 2omen <nersia $alok ( b) b * ## b h9 * ## (#,0 in) (B in)9 * ;=> # in? 0,00#90 in? 3ekakuan $alok ( b)
3ekakuan balok kantileer akibat gaya statis P yang bekerja pada ujung bebas
balok adalah " k b * 9 9 L >1 b * ;=> ) : , # ( ) #0 90 ( 9 9 = lbin * =0,0 lbin "ekakuan Struktur (k )
!erpindahan yang terjadi pada struktur balok kantileer disebabkan oleh balok ( )#) dan
pegas ( )), dimana )# ) dan ) * )# / )). $erarti kekakuan balok dan kekakuan pegas tersusun secara seri, sehingga kekakuan sistem adalah "
k # * b k # / # k * =0 # / =@ , #0 # * 0;9? , @ # k * @,0;9? lbin
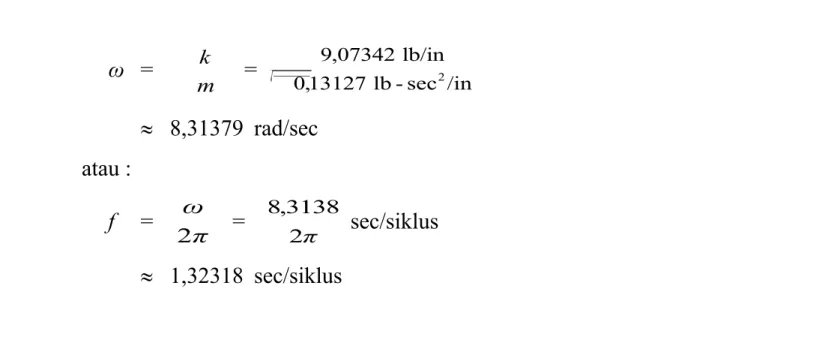
$rekuensi Catural Sistem(6)
!ercepatan raitasi ( g ) g * @,># msec * @,># msec 0,90?>#ft m ##ftin * 9>=,0?; insec 2assa Sistem (m) m * g = * insec 0?; , 9>= lb ;0 , :0 0,#9#; lb-secin
Frekuensi atural Sistem
6 * m k * in sec -lb #9#; , 0 lbin 0;9? , @ >,9#9;@ radsec atau " f * A 6 * A 9#9> , > secsiklus #,99#> secsiklus
2.. GERAK BEBAS DENGAN REDAMAN ( DAM"ED FREE -I.RATION )
!emodelan sistem struktur S&$ 1 gerak bebas dengan redaman (damped free vibration), dapat dilihat pada Gambar 2./ berikut.
Sistem Struktur S&$ dealisasi odel atematis
#amped $ree 3ibration' Struktur Struktur
Gambar 2./ Sistem S&$ 4 Gerak Bebas dengan 5edaman #amped $ree 3ibration'
!ersamaan gerak (eEuation of motion) struktur untuk kondisi Gera! .e&as dengan Redaman ( Damped Free -i&ration), dapat ditulis dalam bentuk "
m
& c
& ! ' * ... (2.,.1)Dapat dibuktikan bah'a solusi coba-coba (trial solution) )# * $# cos 6t dan ) * $ sin 6t
tidak akan memenuhi !ers. 2.,.1. Solusi yang paling cocok digunakan untuk persamaan gerak bebas dengan redaman (!ers. 2.,.1) adalah fungsi eksponensial "
1(t ) ' G1est ... (2.,.2) Oscar M (132 258 564) II – 18 ) m k k ) m k m k% c ) c c
atau " 2(t ) ' G2t est ... (2.,.+) 2isalkan " ) ( # t ) * # e st ) ( # t )
* # s e st ) ( # t )
* # s e st ... (2.,.,)dengan mensubtitusikan !ers. 2.,., kedalam !ers. 2.,.1, diperoleh "
) m
/ c )
/ k) * 0 m (# se st ) / c (# s e st ) / k (#e st ) * 0 ms ( #e st ) / cs (#e st ) / k (#e st ) * 0 (ms / cs / k ) #e st * 0 ... (2.,.-) * 0 0!ers. 2.,.- di atas dapat diselesaikan, jika dan hanya jika "
ms / cs / k * 0 ... (2.,./ )
!ers. 2.,./ disebut persamaan karakteristik (the characteristic eEuation) untuk sistem
S&$ 1 gerak bebas dengan redaman.
!ersamaan karakteristik di atas merupakan persamaan kuadrat, dimana akar-akar dari persamaan kuadrat adalah "
s#, * m c m mk c ? * cm ( ( ? ? m mk c
* cm ( ( ( ? ? ? m mk m c
s1!2 ' m c 2 m ! m c 2 2 ... (2.,.0 )ilai akar 1 akar !ers. 2.,.0 ( s# dan s), dapat bernilai nol, positif atau negatif, tergantung
dari besaran di ba'ah tanda akar.
4da tiga kondisi getaran yang ditemukan, yaitu "
i . m ! m c 2 2 ' * ii . m ! m c 2 2 3 * iii . m ! m c 2 2 4 * ... (2.,.7)
2..1. Ss%e# Re"a#an Kr%s (:ritica( Damping S*stem)
ntuk sistem S&$ 1 gerak bebas dengan redaman kritis (critical damping system) "
m k m c * 0 c * m m k c * k m ... (2.,.8)
ilai konstanta redaman c pada !ers. 2.,.8 merupakan Ni(ai Redaman %ritis (:ritica( Damping -a(#e), yang dinyatakan dengan notasi ccr , dimana "
ccr ' 2 ! m ... (2.,.1:)
3arena frekuensi natural getaran sistem tanpa redaman (6) dinyatakan oleh persamaan " 6 *
m k
maka %oe)isien Redaman %ritis (:ritica( Damping :oe))icient ) yang diberikan pada !ers. 2.,.1:, dapat dinyatakan dalam persamaan "
ccr ' 2 m 0 ... (2.,.11) atau " ccr ' 0 ! 2 ... (2.,.12) Sehingga nilai akar-akar persamaan karakteristik pada !ers.2.,.0 untuk kondisi redaman kritis adalah "
Oscar M (132 258 564) II – 2#
Ss%e# Re"a#an Kr%s
(:ritica( Damping S*stem)
Ss%e# Re"a#an S+,err%s
(O/erdamping S*stem)
Ss%e# Re"a#an S+r%s
s1!2 ' 0
m ccr
2 ... (2.,.1+)
2aka solusi dari sistem S&$ 1 gerak bebas dengan redaman kritis adalah "
1(t ) ' G1 e 0 (ccr 2m)t ... (2.,.1,)
Solusi indenpenden lainnya, dapat juga dengan menggunakan persamaan berikut "
2(t ) ' G2 t e 0 (ccr 2m)t ... (2.,.1-)
So(#si Um#m dari sistemS&$ 1 gerak bebas dengan redaman untuk kondisi Redaman %ritis, merupakan superposisi dari dua persamaan di atas (!ers. 2.,.1, dan !ers. 2.,.1-),
yaitu "
(t ) ' G1 e 0 (ccr 2m)t & G2 t e 0 (ccr 2m)t ... (2.,.1/ )
atau "
(t ) ' (G1 & G2t ) e 0 (ccr 2m)t ... (2.,.10 )
edaman aktual dalam sistem dapat dinyatakan dalam bentuk redaman kritis (ccr ). Dengan
memperkenalkan suatu Rasio Redaman ( Damping Ratio, ? ) yang didefinisikan sebagai perbandingan antara redaman struktur dengan redaman kritis, dimana "
? ' cr c c ? ' m0 c 2 ... (2.,.17) atau " c ' 2 m 0 ? ... (2.,.18)
Dengan mensubtitusikan !ers. 2.,.18 kedalam Pers. 2.,.0 , maka !ers. 2.,.0 dapat juga ditulis dalam bentuk "
s#, * 1 m c m k m c * 1 m F m6 6 m F m6 * 1 6F 6 F 6 Oscar M (132 258 564) II – 21
s1!2 ' 0 0? 1
2 ?
0 ... (2.,.2:)
dimana "
@i!a ? ' 1 :ritica( Damping (Re"a#an Kr%s)
? 3 1 O/erdamping (Re"a#an S+,err%s)
? 4 1 Underdamping (Re"a#an S+r%s)
... (2.,.21) Sehingga untuk redaman kritis (critical damping , F * #), nilai akar-akar persamaan pada !ers 2.,.2: adalah "
s1!2 ' 00? ... (2.,.22)
Solusi dari sistem S&$ 1 gerak bebas dengan redaman untuk kondisi redaman kritis dapat juga ditulis dalam bentuk "
1(t ) ' G1 e 00?t ... (2.,.2+)
atau "
2(t ) ' G2 t e 00?t ... (2.,.2,)
So(#si Um#m dari sistemS&$ 1 gerak bebas dengan redaman untuk kondisi Redaman %ritis, merupakan superposisi dari dua persamaan di atas (!ers. 2.,.2+ dan !ers. 2.,.2,),
yaitu "
)(t ) * #e 16Ft / t e 16Ft
atau "
(t ) ' (G1 & G2t )e 00?t ... (2.,.2-)
ilai konstanta integrasi # dan pada !ers. 2.,.2- dapat ditentukan, jika kondisi a'al
sistem diketahui. ntuk kondisi a'al sistem " )(0) * )o dan )
(0) * vo, diperoleh " )(t ) * (#/ t )e 16Ft ) 0 ( ) * %#/ (0)& e0 * ) o G1 ' / ... (2.,.2/ ) Oscar M (132 258 564) II – 22 )
(t ) * 1 6F (#/ t )e 16Ft / e 16Ft ) 0 ( )
* 1 6F %#/ (0)& e0 / e0 * vo 1 6F # / * vo * vo / 6F # G2 ' // & 0? / ... (2.,.20 )Dengan mensubtitusikan !ers. 2.,.2/ dan !ers. 2.+.20 kedalam !ers. 2.,.2-, diperoleh
So(#si %5#s#s sistem S&$ 1 gerak bebas dengan Redaman %ritis "
)(t ) * (# / t )e 16F t
* % )o / (vo / 6F )o)t & e 16F t * % )o / vot / 6F )ot & e 16F t
* % )o / 6F )ot / vot &e 16F t * % ( )o / 6F t )o) / vot &e 16F t
(t ) ' 5 / (1 & 0? t ) & //t ) 6e 00? t ... (2.,.27)
Gambar 2./ 5espon Gerak Bebas dengan 5edaman "ritis
Dari Gambar 2./ di atas, dapat dilihat bah'a untuk redaman kritis, gerak yang terjadi
bukan osilasi, namun besar osilasi mengecil secara eksponensial dengan 'aktu menuju nol.
Oscar M (132 258 564) II – 23 vo t )(t ) )o )(t ) * % )o (# /6F t ) / vot ) &e 16F t