Analisis Bifurkasi Pitchfork pada Sistem Interaksi Non Linier Sepasang Osilator Melalui Metode Menifold Center
Wahnin Tangahu1
Abstrak
Wahnin Tangahu, NIM.411409131. Analisis Bifurkasi Pitchfork pada Sistem In-teraksi Non Linier Sepasang Osilator Melalui Metode Menifold Center. Skripsi, Ju-rusan Pendidikan Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam, Universitas Negeri Gorontalo. Pembimbing (I) Hj. Novianita Achmad S.Si, M.Si dan Pembimbing (II) Nurwan S.Pd, M.Si.
Dalam mempelajari sistem interkasi nonlinier sepasang osilator yang tak terperturbasi digunakan metode manifold center untuk menyederhanakan sistem ini, karena sistem ini merupakan sistem nonlinier yang memiliki nilai eigen bagian realnya nol. Sistem tersebut adalah sebagai berikut:
˙ r ˙ x ˙ y = δxr
ωy+αxy+βy2−δr2 −ωx−αx2−βyx
Dari hasil pembahasan diidentifikasi adanya bifurkasi satu parameter dengan meng-gunakanmatcontpada sistem interaksi nonlinier sepasang osilator yang tak terper-turbasi disekitar titik tetap (0,0,−ω
β). Kemudian sistem ini disederhanakan dengan
menggunakan metode manifold center sehingga lebih mudah dalam menganalisa per-laku bifurkasi pada sistem interaksi nonlinier sepasang osilator yang tak terperturbasi disekiter titik tetap tersebut. Dari sistem yang telah tereduksi pada manifold center sebagai berikut: ˙ u=−9uv2 ˙ v= 6uv+ 6uvµ−6v3 ˙ µ= 0
kemudian dapat diperoleh bentuk normal dan hasil plot gambar yang menunjukkan adanya bifurkasi satu parameter pada sistem interaksi nonlinier sepasang osilator di sekitar titik tetap (0,0,−ω
β) yaitu bifurkasi pitchfork.
1 Pendahuluan
Pada tahun 2003,2004, dan 2006 Tuwankotta [11] melakukan penyederhanaan sistem yang sama dengan sistem sepasang osilator yang di teliti oleh Crommelin [2] pada tahun 2002 yang dikenal dengan Ultra-Low Frequency Variability (ULFV). Sistem ini merupakan sistem yang berdimensi 4 yang merepresentasikan sepasang osilator yang saling berinteraksi dengan perbandingan frekuensi 1 : ε dengan 0 < ε 1 adalah parameter yang cukup kecil. Dengan nilai eigen dari matriks A adalahεα1±iβ1 danεα2±iεβ2. Sistem ini di
1
Jurusan Pend. Matematika, Universitas Negeri Gorontalo,
Jln. Jend. Sudirman, No.6, Prov. Gorontalo. Telp.0435-821752, Fax.0435-827213 Email: [email protected]
sederhanakan oleh Tuwankotta ke bentuk normal yang dapat mempertahankan dinamik dari sistem (??) secara kualitatif. Untuk menyederhanakan sistem ini ke bentuk normal, Tuwankotta menggunakan metode perataan. Bentuk normal dari sistem ini adalah sebagai berikut: ˙ r ˙ x ˙ y =ε κ1 0 0 0 −κ2 0 0 0 −κ2 r x y + δxr Ωy−δr2 −Ωx , (1)
dengan Ω =α+βx+ωydan 0< ε1 adalah parameter perturbasi.
Dalam skripsi ini peneliti mengasumsikan pada sistem (??) tidak terdapat gangguan atau secara matematis dituliskan ε = 0. Sehingga diperoleh sistem interaksi nonlinier sepasang osilator dengan parameter tak terperturbasi sebagai berikut:
˙ r ˙ x ˙ y = δxr
ωy+αxy+βy2−δr2 −ωx−αx2−βyx
Ada dua titik setimbang dalam sistem dinamik yaitu titik setimbang hiperbolik dan titik setimbang non hiperbolik. Kestabilan titik setimbang non hiperbolik ditentukan dengan mereduksi sistem dengan menggunakan manifold center. Ketika Sistem yang direduksi dengan manifold center bergantung pada parameter, maka selanjutnya dapat dilakukan analisa bifurkasi.
2 Tinjauan Pustaka Sistem Dinamik
Misalkan diberikan sistem persamaan diferensial (sistem dinamik kontinu) autonomos atau sistem yang tidak bergantung secara eksplisit terhadap waktu, sebagai berikut :
˙
x=f(x), x∈E⊂Rn (2)
denganx= (x1, x2, x3, xn), f :E−→Rn, f = (f1, f2, f3, fn). Solusi dari sistem (2)adalah
suatu kurvaγ:R−→Rnyang memenuhi dγdt =F(γ(t)) untuk setiapt∈R. Ruang variabel bebas pada sistem dinamik biasanya dinyatakan sebagai waktu, sedangkan ruang variabel terikat di Rn pada sistem (2) sering disebut dengan ruang fase. Kurva γ diatas disebut
dengan orbit, sedangkan kumpulan dari orbit-orbit pada ruang fase disebut dengan potret fase. Salah satu solusi dari sistem (2) adalah titik ekuilibrium.
Titik ekuilibrium dari sistem (2) adalah suatu solusi ¯x∈Rnsedemikian sehinggaf(¯x) =
0. Proses linearisasi dengan menggunakan deret Taylor di sekitar titik ekuilibrium akan diperoleh sistem linear dengan bentuk ˙x=Ax, denganAmatriksn×n.
Definisi 2.1. Sebuah titik kritis dikatakan hiperbolik jika bagian real nilai eigen dari ma-triks jakobi J(u,v) adalah tidak nol. jika bagian manapun nilai eigen dari mama-triks jakobi adalah nilai nol, maka titik kritis disebut nonhiperbolik.
Pelinieran
Sistem (2) adalah bentuk sistem non linier yang masih sulit untuk di analisa, sehing-ganya untuk lebih memudahkan dalam menganalisis sistem (2), perlu dilakukan pelinieran di titik ekuilibrium ¯x(t). Misalkan,
x= ¯x(t) +y (3)
dengan mensubstitusi (3) ke (2) maka diperoleh persamaan sebagai berikut: ˙
x= ˙¯x+ ˙y (4)
kemudian melalui ekspansi taylor di sekitar titik ekuilibrium ¯x(t). Maka diperoleh:
˙
x = f(¯x(t))y+Df(¯x(t))y+O(|y|2)
˙¯
x(t) + ˙y = f(¯x(t)) +Df(¯x(t))y+O(|y|2) (5)
Oleh karena ˙¯x(t) =f(¯x(t)) , maka persamaan (5) dapat disederhanakan menjadi persamaan berikut:
˙
y=Df(¯x(t))y+O(|y|2
) (6)
JikaT=Df(¯x(t)), maka sistem (6) dapat dituliskan menjadi :
˙
y=T y+O(|y|2). (7)
Perhatikan teorema berikut :
Teorema 2.1. Misalkan matriks T pada (7) semua nilai eigennya bernilai negatif, maka titik ekuilibriumx= ¯xstabil asimtotik.
Untuk pembuktiannya lihat Wiggins,[13]halaman 8.
Dengan demikian, untuk mempelajari dinamik disekitar titik equilibrium dari sistem (2), maka kita akan hanya mempelajari bagian linier dari (7), yaitu:
˙
y=T y, y∈Rn (8)
Bifurkasi Pitchfork
Pandang persamaan diferensial berikut: ˙
x=f(x, µ) =µx−x3, x∈R1, µ∈R1. (9)
Kita dapat mendefinisikan manifold ekuilibrium dari persamaan (9) yaitu:
x= 0 (10)
dan
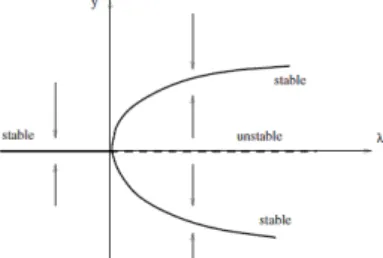
Ilustrasi dari persamaan (9) ditunjukkan oleh gambar (1).
Gambar 1: Diagram bifurkasi pitchfork. Disaatµ <0, sistem (9) memiliki satu titik ekuilibrium stabil di x = 0. Ketika µ > 0, Titik ekuilibrium tersebut berubah menjadi tidak stabil dibarengi dengan munculnya dua titik ekuilibrium baru yang bersifat stabil
3 Manifold Center Bergantung pada Parameter
Dalam matematika terapan, sistem persamaan diferensial disebut juga sebagai sistem dinamik kontinu. Manifold center yang dibahas di dalam subbab ini adalah manifold center untuk sistem persamaan diferensial (sistem dinamik kontinu). Kita dapat tuliskan sistem persamaan diferensial sebagai berikut:
˙
x = Ax+f(x, y),
˙
y = By+g(x, y), (x, y)∈Rs×Rc,
(12)
Definisi 3.1. (Wiggins [13] 1990)Sebuah manifold invarian dikatakan manifold center untuk (12)jika secara lokal bisa direpresentasikan sebagai:
Wc={(x, y)∈Rc×Rs|y=h(x),|x|< δ, h(0) = 0, Dh(0) = 0},
untukδyang cukup kecil.
Dalam menangani sistem parametrized adalah untuk menyertakanεparameter sebagai variabel dependen baru sebagai berikut
˙ x = Ax+f(x, y, ε) ˙ ε = 0, (x, ε, y)∈Rc×Rp×Rs ˙ y = By+g(x, y, ε), (13)
Misalkan kita mempertimbangkan (13) lagi. Sistem (13) jelas memiliki titik tetap pada (x, ε, y) = (0,0,0). Matriks terkait dengan linearisasi dari sistem (13) tentang titik tetap memiliki nilai eigen c+p dengan nol bagian real dan nilai eigen s dengan bagian real negatif. Memodifikasi Definisi (3.1) center manifold akan diwakili sebagai grafik di atasx
dikurangi menjadi center manifold diberikan oleh: ˙ u = Au+f(u, h(u, ε), ε), ˙ ε = 0, (u, ε)∈Rc×Rp. (14)
Manifold center ada untuk semuaεdi lingkungan yang cukup kecilε= 0. Dengan demikian, jika center manifold invariant ada di lingkungan cukup kecil dixdanεpada (x, ε) = (0,0), semua solusi bifurkasi akan terkandung dalam manifold center dimensi rendah.
Dari teorema keberadaan untuk manifold center lokal kita memiliki
Wc(0) ={(x, ε, y)∈
Rc×Rp×Rs|y=h(x, ε),|x|< δ,|ε|<δ,¯ h(0,0) = 0, Dh(0,0) = 0}
untukδ dan ¯δcukup kecil.
Dengan menggunakan invarian dari grafikh(x, ε) pada dinamika yang dihasilkan oleh (12) kita memiliki: ˙ y=Dxh(x, ε) ˙x+Dεh(x, ε) ˙ε=Bh(x, ε) +g(x, h(x, ε), ε). (15) namun, ˙ x=Ax+f(x, h(x, ε), ε), ˙ ε= 0; (16)
maka kita mengganti (16) menjadi (15) hasil dalam persamaan diferensial parsial yang quasilinear denganh(x, ε) harus memenuhi grafik untuk manifold center.
N(h(x, ε)) =Dxh(x, ε)[Ax+f(x, h(x, ε), ε)]−Bh(x, ε)−g(x, h(x, ε), ε) = 0
4 Metode Penelitian
Analisis yang dilakukan yaitu untuk mengkaji hasil plot dari setiap titik ekuilibrium sistem interaksi nonlinier sepasang osilator yang telah disederhanakan. Setelah diperoleh hasil dari plot, maka dilakukan analisis kestabilan titik ekuilibrium dengan menggunakan metode manifold center. Dari analisa kestabilan titik ekuillibrium tersebut, maka dapat dianalisa jenis bifurkasi yang terjadi pada sistem interaksi nonlinier sepasang osilator di sekitar titik ekuilibriumnya.
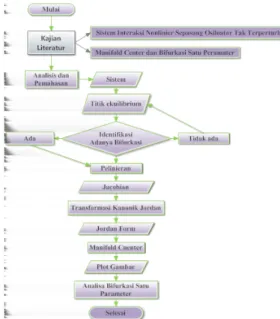
Pada penelitian ini akan dilakukan beberapa tahapan penelitian yang dapat dilihat pada flow chart berikut:
Gambar 2: Bagan Alir Penelitian
5 Pembahasan
Penentuan Titik Ekuilibrium
Sistem interaksi nonlinier sepasang osilator yang dibahas dalam skripsi ini adalah sistem interaksi non sepasang osilator yang tak terperturbasi dimana diasumsikan bahwa tidak ada gangguan yang terjadi atau secara matematis dituliskanε= 0.
˙ r ˙ x ˙ y = δxr
ωy+αxy+βy2−δr2 −ωx−αx2−βyx
(17)
Titik ekuilibrium dari sistem (17) adalah suatu solusi ¯r,¯x,¯ysedemikian sehinggaf(¯r,x,¯ y¯) = 0.
Sehingga dari sistem (17) dapat dituliskan secara matematis sebagai berikut:
δxr= 0 (18)
ωy+αxy+βy2−δr2= 0 (19)
−ωx−αx2−βyx= 0 (20)
Dari persamaan (18) diperoleh ¯r= 0, kemudian nilai ¯rdisubstitusikan pada persamaan (19) diperoleh nilai ¯y= 0. Sehingga dengan mensubstitusikan nilai dari ¯ypada persamaan (20), diperoleh nilai ¯y= −ω
α . Sehingga diperoleh manifold ekuilibrium (0,
−ω α ,0).
Dengan bantuanmapledapat diketahui nilai eigen dari sistem dititik ekuilibrium (0,−ω α ,0)
adalah (−αδω,0,βωα). Hal ini mengakibatkan akan ada kemungkinan terjadinya bifurkasi satu parameter, karena bagian real dari nilai eigennya adalah nol.
Kemudian dari persamaan (18) diperoleh ¯r = 0, dan dari persamaan (20) diperoleh nilai ¯x = 0. sehingga dengan mensubstitusikan nilai dari ¯r dan ¯x pada persamaan (19), diperoleh nilai ¯y=−ω
β . Sehingga diperoleh manifold ekuilibrium (0,0,
−ω β ).
Dengan bantuanmapledapat diketahui nilai eigen dari sistem dititik ekuilibrium (0,0,−ω β ) adalah (0,0,−αω
β ). Hal ini mengakibatkan akan ada kemungkinan terjadinya bifurkasi satu parameter, karena bagian real dari nilai eigennya adalah nol.
Perhatikan bahwa dari sistem (1), jika kita misalkanr= 0 maka akan memberikan dua persamaan sebagai berikut:
Ωy = 0
−Ωx = 0
Sehingga diperoleh persamaan Ω = 0, oleh karena Ω =ω+αx+βy, maka diperoleh man-ifold ekuilibrium yaitu (0, x0,−αxβ0+ω). Dengan bantuanmaple dapat diketahui nilai eigen
dari sistem dititik ekuilibrium (0, x0,−αxβ0+ω) adalah (δx0,1βc/2, −1/2
βc ). Dimana c adalah bilangan konstan yang dihasilkan oleh parameter-parameter yang terdapat pada sistem. Dengan melihat nilai eigen diatas menunjukkan bahwa sistem disekitar titik ekuilibrium pada manifold ekuilibrium ini adalah tidak stabil / saddle. Sehingga dapat diketahui tidak terjadi bifurkasi pada sistem disekitar titik ekuilibrium (0, x0,−αxβ0+ω).
Dari penjelasan diatas, untuk selajutnya penelitia difokuskan yaitu menganalisa bi-furkasi disekitar titik ekuilibrium (0,0,−βω)
Analisa Bifurkasi Secara Numerik
Dalam memplot gambar pada matcont, dibutuhkan penginputan nilai-nilai parameter yang terdapat pada sistem (17),dengan parameterαyang divariasikan. Pada Tuwankotta [11], telah ditetapkan nilai dari parameter-parameter dari sistem interaksi nonlinier sepasang osilator denganε= 0, yaituδ <0,ω >0, danβ <0.
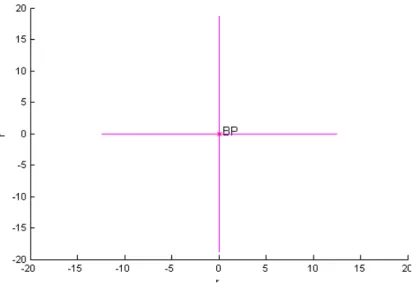
Oleh karena itu kita asumsikan bahwaβ=−3,δ=−2, danω= 2. Dengan nilaiαyang divariasikan, maka dapat diplot gambar dengan menggunakanmatcont sebagai berikut:
Gambar 3: Identifikasi Bifurkai satu parameter pada sistem (17)
Plot gambar diatas menunjukkan adanya simbol BP(Branch Point) yang hanya da-pat menunjukkan adanya dua kemungkinan terjadinya bifurkasi pitchfork atau transkritikal (menurut manualmatcont). Pada saat dikontinuasi di titik ekuilibrium (0.0000055,0.000055,2/3) dengan nilai parameterα=−2,β=−3,δ=−2,ω= 2 ,maka diperoleh titik bifurkasi di
α= 0.1868. Sehingga hal ini mengidentifikasikan secara lokal adanya bifurkasi satu para-meter pada sistem interaksi nonlinier sepasang osilator tak terperturbasi disekitar manifold ekuilibrium (0,0,−ω
β ).
Tranformasi Sistem dari Titik Ekuilibrium Trivial ke Titik Ekuilibrium Non Tri-vial Disasumsikan bahwa: r = r¯+m x = x¯+n y = y¯+o (21)
dengan melakukan penurunan dari persamaan-persamaan (21) maka dapat diperoleh: ˙ r = m˙ ˙ x = n˙ ˙ y = o˙ (22)
dan dengan mensubstitusikan nilai dari titik ekuilibrium nontrivial tersebut ke persamaan-persamaan (21), maka diperoleh:
r = m
x = n
y = o−ω β
(23)
kemudian persamaan (22) dan (23) disubstitusi ke sistem (17), maka diperoleh matriks hasil transformasi adalah sebagai berikut:
˙ m ˙ n ˙ o = δmn −ωα
β −ωo+αno+βo
2− δm2 αn2−βno (24)
Transformasi Kanonik Jordan
Perhatikan bahwa hasil transformasi (24) adalah suatu sistem yang setelah dilakukan linierisasi matriks jacobian menghasilkan nilai eigen (0,0,0). Oleh karena itu akan dilakukan transformasi koordinasi dengan persamaan (α =µ−1). Penentuan nilai-nilai parameter dengan disubstitusikan nilai-nilai parameter dibawah ini: β=−3,δ=−2, danω= 2yang disesuikan dengan syarat-syarat setiap parameternya yang telah dibahas oleh Tuwankotta [11]sebelumnya, maka diperoleh:
˙ m ˙ n ˙ o = −2mn −2m2+2 3µn+onµ− 2 3n−no−3o 2− 2o −n2 µ+n2+ 3no (25)
Sistem (25) adalah sistem nonlinier yang belum berbentuk matriks jacobian/matriks kanonik jordan. Dalam melakukan proses perhitungan center manifold, sistem (25) dengan
µyang telah dipandang sebagai variabel baru harus berbentuk kanonik jordan. Oleh karena itu terlebih dahulu harus dilakukan pelinieran pada sistem (25) untuk membentuk sistem yang berbentuk kanonik jordan.
Matriks bagian linier dari sistem (25) dengan yang kemudian disebutkan sebagai matriks
Aadalah sebagai berikut:
A= 0 0 0 0 23 −2 0 0 0 (26)
dan bagian nonlinier dari sistem (25) yang kemudian disebut sebagai matriks F(m, n, o) adalah sebagai berikut:
F(m, n, o) = −2nm 2m2+2 3µn+onµ+no−3o 2 −n2 µ−n2+ 3no (27)
Transformasi sistem (25) kebentuk kanonik Jordan dengan menggunakan persamaan transformasi sebagai berikut:
m n o =P u v w (28)
Kemudian persamaan (28) diturunkan terhadap variabel waktu maka diperoleh persamaan : ˙ m ˙ n ˙ o =P ˙ u ˙ v ˙ w (29) sehingga diperoleh: ˙ u ˙ v ˙ w =P −1 ˙ m ˙ n ˙ o (30)
Dengan Matriks P adalah matriks yang terbentuk dari vektor eigen yang diperoleh dari sistem (25). Sehingganya kita terlebih dahulu menentukan nilai eigen dari matriks tersebut. Dengan menggunakan persamaanDet(A−λI) = 0 dengan matriksAadalah matriks bagian linier dari sistem , danI adala matriks identitas.
Dengan menggunakan persamaan diatas maka dapat diperoleh nilaiλ1 = 0, λ2 = 0, λ3= 23. Nilai eigen yang diperoleh adalah nilai eigen memiliki bagian real 0, sehingga titik
ekuilibrium diatas adalah titik ekuilibrium nonhiperbolik. Dari nilai eigen diatas dapat diperoleh vektor eigen yang bersesuaian dengan persamaan (A−λiI)V = 0 dalam hal ini
i= 1,2,3. Vektor eigen tersebut yaitu:
V1 = 0 3 1
V2 = 1 0 0
V3 = 0 1 0 .
Dari vektor eigen yang diperoleh diatas ,maka dapat dibentuk matriksPsebagai berikut:
P= 1 1 0 −3 0 1 1 0 0 (31)
dan invers dari matriksP secara matematis dituliskanP−1 yaitu:
P−1= 0 0 1 1 0 0 0 1 3 (32)
inpersnya pada persamaan (30), maka diperoleh bentuk kanonik jordannya sebagai berikut: ˙ u ˙ v ˙ w = 0 0 0 0 0 0 0 0 −2/3 u v w + −9u2µ+ 6uwµ−w2µ−3uw+w2 6uv−2vw −2/3w−30u2µ−2uµ+ 19uwµ+ 2/3wµ−10uw+ 2v2−3w2µ+ 3w2 (33)
Sistem Manifold Center Bergantung pada Parameter
Berdasarkan bentuk umum dari medan vektor Manifold canter bergantung pada para-meter : ˙ x = Ax+f(x, y, ε) ˙ y = By+f(x, y, ε), (x, y, ε)∈Rc×Rs×Rp (34) Dimana A adalah matriksn×n dengan nilai eigen bagian real adalah nol, dan B adalah matriksm×mdengan nilai eigen bagian real negataif. maka pada sistem (33):
x≡(u, v), y≡w, danε≡α
bagian linier dari matriks (33) jika dipandang dari medan vektor manifold center yaitu:
A= 0 0 0 0
!
B=−2/3
Bagian nonlinier dari matriks (33) jika dipandang dari medan vektor manifold center yaitu:
f(u, v, w, µ) = −9u 2µ+ 6uwµ−w2µ−3uw+w2 6uv−2vw ! g(u, v, w, µ) = −2/3w−30u2µ−2uµ+ 19uwµ+ 2/3wµ −10uw+ 2v2−3w2µ+ 3w2
Selanjutnya µ dipandang sebagai variabel baru sehingga medan vektor untuk sistem (33) adalah: ˙ u ˙ v ! = 0 0 0 0 ! u v ! + −9u 2 µ+ 6uwµ−w2µ−3uw+w2 6uv−2vw ! ˙ w=−2/3w−30u2µ−2uµ+ 19uwµ+ 2/3wµ−10uw+ 2v2−3w2µ+ 3w2 ˙ µ= 0 (35)
parameter:
Wc(0) ={(u, v, w, µ)∈R4|w=h(u, v, µ), h(0,0,0) = 0, Dh(0,0,0) = 0} (36)
Perhatikan w=h(u, v, µ), hal ini dikarenakan pada medan vektor manifold center, tujuan akhirnya adalah mereduksi persamaan differensial dengan nilai eigen yang bagian realnya tak nol. Kemudian kita mengasumsikan persamaanhdengan syarat pada persamaan (36) yaitu dan : h(u, v, µ) = a1u2+a2v2+a3µ2+a4uv+a5xµ+a6yµ ∂h(u,v,µ) ∂u = 2a1u+a4v+a5µ ∂h(u,v,µ) ∂v = 2a2v+a4u+a6µ (37)
Dalam manifold center diketahui bahwa terdapat syarat:
N(h(u, v, µ)) = [∂h(∂uu,v,µ) ∂h(u,v,µ∂v )][A[[u],[v]] +f(u, v, h(u, v, µ), µ)]−Bh(u, v, µ)
−g(u, v, h(u, v, µ), µ) = 0 (38)
perhatikan pada persamaan (38), variabel w telah berganti menjadi persamaan h, oleh karena itu, kita tuliskan:
f(u, v, h, µ) = −9u 2 µ+ 6uhµ−h2µ−3uh+h2 6uv−2vh ! g(u, v, h, µ) = −2/3h−30u2µ−2uµ+ 19uhµ+ 2/3wµ −10uh+ 2v2−3h2µ+ 3h2 (39)
Sehingga dengan mensubstitusikan matriksA, persamaan (39),dan persamaan-persamaan (37) pada (38), maka kita akan memperoleh persamaan yang berorde 6 dengan variabel (u, v, µ). Dalam hal ini kita mareduksi persamaan tersebut yang bersesuaian dengan orde
h. Karenahmemiliki orde 2, maka hasil susbstitusi diatas, kita batasi pada orde 2 sebagai berikut:
(2/3)a6vµ+ (2/3)a4uv+ (2−(2/3)a5)uµ+ (2/3)a3µ2+ (2/3)a1u2
+((2/3)a2−2)v2= 0 (40)
selanjutnya, kita akan menentukan nilai dari tiap koefisien pada persamaanhmelalui persamaan (40). Sehingga tiap koefisien pada persamaan (40) adalah nol, dan dapat diper-oleh koefisien dari persamaanhyaitu:
a1 = 0, a2 = 3, a3 = 0, a4 = 0, a5 =−3, a6 = 0 (41) dengan mensubstitusikan (41) pada persamaanh, maka kita memperoleh:
h(u, v, µ) = 3v2−3uµ (42)
nol dan mensubstitusikan persamaan (42) berdasarkanw=h(u, v, µ), serta mereduksinya mejadi ordo 3, sehingga diperoleh:
˙ u=−9uv2 ˙ v= 6uv+ 6uvµ−6v3 ˙ µ= 0 (43)
Perhatkan sistem (43) adalah sistem yang memiliki satu titik ekuilibrium yaitu (u0,0,0)
dimana u0 ∈ u, sehingga perlikau sistem (43) tidak bergantung pada pada variabel u,
sehingga ˙udieliminasi karena perilku sistem cukup dilihat pada:
˙
v = 6((u0+u0µ)v−v3)
˙
µ = 0 (44)
Untuk mendapatkan bentuk normal dari bifurkasi pitchfork pada sistem (44), maka di-lakukan salah satu transformasi koordinasi yaitu scalling waktu.
Kita misalkant= 1/6¯t, maka diperolehdt= 1/6d¯t. Kemudian persamaan ini disubsti-tusikan ke dalam sistem (44). Hal ini mengakibatkan sistem (44) menjadi:
˙
v = (u0+u0µ)v−v3
˙
mu = 0 (45)
Perhatikan sistem (45) adalah bentuk normal dari bifurkasi Pitchfork. Sehingga dapat dis-umpulkan bahwa pada sistem interaksi nonlinier sepasang osilator disekitar titik ekuilibrium (0,0,−ω/β) dapat dianalisa perilaku bifurkasinya dengan mereduksinya kepersamaan yang lebih sederhana dengan manifold center. Sehingga dari bentuk normal diatas maka dapat dianalisa perilaku bifurkasi pitchfork dengan menggunakan softwaremaple 16.
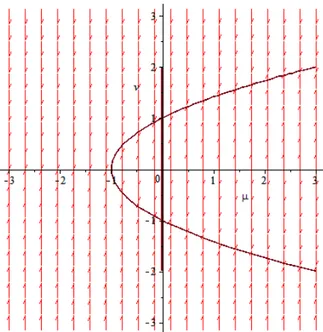
Karenau0 ∈Ryang konstan, maka dengan menentukan nilaiu0 = 1, maka diperoleh
Gambar 4: Bifurkasi Pitchfork yang terjadi padau >0
Gambar (4) merepresentasikan bahwa ketikaµ <−1, persamaan (43) hanya memiliki satu titik ekuilibrium yaitu (0,0, µ0) yang stabil. Namun setelah melewati µ >−1, titik
ekuilibrium (0,0, µ0) menjadi tak stabil dan memiliki percabangan yaitu dua titik
ekuili-brium yang stabil. Perubahan jumlah maupun kestabilan dari titik ekuiliekuili-brium dimana dari satu titik ekuilbrium yang stabil kemudian menjadi tiga titik ekuilibrium yang terdiri dari satu titik ekuilibrium yang tidak stabil dan diikuti dengan dua titik yang stabil tersebut adalah kondisi dimana bifurkasi pitchfork terjadi.
6 Penutup
Simpulan
Dari pembahsan diatas secara numerik dapat dibuktikan melalui softwarematcont bahwa terdapat bifurkasi satu parameter pada sistem interaksi nonlinier sepasang osilator dengan parameter tak terperturbasi disekitar titik ekuilibrium (0,0,−ω
β). Sistem inter-aksi nonlinier sepasang osilator dengan parameter tak terperturbasi ini dapat direduksi ke persamaan manifold center secara analitik dengan nilai-nilai parameternya yang telah diten-tukan berdasarkan pada pembahsan Tuwankotta. Sistem akhir dari hasil reduksi manifold center tersebut adalah sebagai berikut:
˙ u=−9uv2 ˙ v= 6uv+ 6uvµ−6v3 ˙ µ= 0
Sehingga dari sistem hasil reduksi tersebut diatas dapat diplot gambar yang menun-jukkan adanya bifurkasi pitchfork pada sistem interaksi nonlinier sepasang osilator yang tak terperturbasi disekitar titik ekuilibrium (0,0,−ω
β ).
Saran
Saran untuk peneliti lainnya yang ingin meneliti permasalahan yang relevan dengan penelitian ini agar dapat meneliti kestabilan sistem interaksi nonlinier sepasang osilator tak terperturbasi disekitar titik ekuilibrium lainnnya yang tidak dibahas dalam skripsi ini.
Referensi
[1] Carr, J. 1981.Applications of Center Manifold Theory. Springer-Verlag.
[2] Crommelin, D.T. 2002.Homoclinic Dynamics : A Scenario for Atmospheric Ultra Low-Frequency Variability. J.Atmos. Sci.
[3] Fatimah,S. 2010.Dinamika pada Sistem Autoparametrik. Bandung:UPI.
[4] Hubbard, J.H dan West,B.H. 1990.Differential Equations: A Dynamical system Approach.New York Berlin Heidelberg: Springer-Verlag.
[5] Kuznetsov, Y.A. 1998.Elements of applied bifurcation theory. New York: Springer-Verlag. [6] Panigoro, H.S. 2011.Barisan Hingga Bifurkasi Period-Doubling pada Interaksi NonLinier
Sepa-sang Osilator. Bandung: ITB.
[7] Panigoro, H.S. 2011. Simplikasi Sistem Interaksi Nonlinier Sepasang Osilator dengan Menggu-nakan Metode Perataan. J. Euler.
[8] Iswanto, R.J. 2012.Pemodelan Matematika (Aplikasi dan Terapannya).Yogyakarta: Graha Ilmu. [9] Setiawan, R. 2011. Center Manifold dari Sistem Persamaan Diferensial Biasa Nonlinear yang
Titik Ekuilibriumnya Mengalami Bifurkasi (Contoh Kasus Untuk Bifurkasi Hopf.Surakarta: USM
[10] Thomas. 2010.Bifurcation Theory,J. Dynamic Macroeconomic Theory.
[11] Tuwankotta, J.M. 2003. Widely Separated Frequencies in Coupled Oscillators with Energy-preserving Quadratic Nonlinearity. Physica D.
[12] Verhulst, F. 1996.Nonlinear Differential Equations and Dynamical Systems. Berlin Heidelberg: Spinger-Verlag.
[13] Wiggins, S. 1990.Introduction to Applied Nonlinear Dynamical System and Chaos. New York: Springer-Verlag.