Pencarian Rute Terpendek pada Jalur Perlombaan Robot Pemadam Api dengan
Algoritma Evolution Strategies
Benny Ermawan
Mahasiswa Program Studi Teknik Informatika, FT UMRAH
Hendra Kurniawan, S.Kom., M.Sc.Eng
Dosen Program Studi Teknik Informatika, FT UMRAH
Alena Uperiati, S.T., M.Cs.
Dosen Program Studi Teknik Informatika, FT UMRAH
ABSTRAK
Perkembangan teknologi saat ini membuat manusia semakin terbantu dalam menyelesaikan suatu pekerjaan. Kemajuan teknologi ini robot pemadam api dapat memilih jarak terdekat dari daerah tersebut untuk di lalui, karena dapat menghemat waktu serta bahan bakar tentunya. Untuk jalur robot tertentu rute terdekat yang sangat diperhitungkan sekali untuk menghindari kerugian. Membantu dalam menentukan rute terpendek dapat digunakan peta jalur dan memilih jalur yang di anggap terpendek dari daerah asal ke daerah tujuan. Namun hal ini dirasa kurang maksimal dan memperlambat karena harus memilih sendiri dari banyak jalur yang ada dan melakukan perhitungan sendiri mana kira-kira rute terpendek dari daerah asal menuju daerah tujuan yang dihendaki.
Dalam penelitian ini menggunakan algoritma Evolution Strategies (ES) Tipe proses ES yang digunakan adalah (μ + λ) sehingga proses elitism selection melibatkan parent dan offspring. Solusi optimal tidak di pengaruhi dari ukuran offspring dan sigma. Hasil akhir berupa pencarian rute terpendek pada jalur perlombaan robot pemadam api.
Kata kunci: Evolution Strategies, Pencarian Rute Terpendek
ABSTRACT
Current technological developments make human beings increasingly assisted in completing a job. This technological advancement fire fighting robot can choose the shortest distance from the area to be passed, because it can save time and fuel of course. For specific robot path nearby s very calculated once to avoid losses. Assist in determining the shortest route can be used trail map and choose the path that is considered the shortest from origin to destination. But this is less the maximum and should choose their own slow because of the many paths that exist and do the calculations yourself where do you think the shortest route from the place of origin to the destination that backfire.
In this study, using algorithms Evolution Strategies (ES) ES Process type used is (μ + λ) so that elitism selection process involves parent and offspring. The optimal solution is not influenced from the size of offspring and sigma. The final result of the shortest route search on the lane track fire extinguisher robot.
I. PENDAHULUAN Latar Belakang A.
Perkembangan teknologi saat ini
membuat manusia semakin terbantu
dalam menyelesaikan suatu pekerjaan.
Kemajuan teknologi ini robot pemadam
api dapat memilih jarak terdekat dari
daerah tersebut untuk di lalui, karena
dapat menghemat waktu serta bahan bakar
tentunya. Untuk jalur robot tertentu rute
terdekat yang sangat diperhitungkan
sekali untuk menghindari kerugian.
Kesulitan menentukan rute terdekat
karena terdapat banyak jalur yang ada
pada tiap rute robot pemadam api
sehingga banyak sekali jalur yang dapat di
lalui sampai ke tujuan. Suatu jalur
memiliki banyak jalur alternatif dari
kedudukan semula ke kedudukan yang
dihendaki.
Membantu dalam menentukan rute
terpendek dapat digunakan peta jalur
robot pemadam api dan memilih jalur
yang di anggap terpendek dari daerah asal
ke daerah tujuan. Namun hal ini dirasa
kurang maksimal dan memperlambat
karena harus memilih sendiri dari banyak
jalur yang ada dan melakukan perhitungan
sendiri mana kira-kira rute terpendek dari
daerah asal menuju daerah tujuan yang
dihendaki.
Oleh kerena itu diperlukan suatu
sistem yang dapat membantu menemukan
rute terpendek dari daerah asal ke daerah
tujuan serta terkomputerisasi sehingga
memudahkan dalam menentukan rute
terpendek yang di dapat. Salah satunya
menggunakan
Algoritma
Evolution
Strategies.
Teknik
optimasi
Evolution
Strategies (ES) dicetuskan sejak awal
tahun 1960-an seperti halnya Algoritma
genetika, ES telah diaplikasikan dalam
berbagai bidang, misalnya penjadwalan
pemrosesan sinyal digital pada system
multiprocessor, pemrosesan citra dan
computer vision, optimasi pelepasan
airbag secara otomatis pada mobil, dan
penjadwalan
tugas
pada
real-time
distributed computing systems. ES juga
efektif dikombinasikan/dihibridasi dengan
algoritma lain seperti particle swarm
optimization untuk penjadwalan staff
(Mahmudy, 2013).
Telah
terdapat
penelitian
sebelumnnya mengenai pencarian rute
optimum dengan Evolution Strategis
Delivery order. Delivery order merupakan
salah satu layanan jasa pesan antar
makanan siap saji yang cukup diminati
masyarakat
yang
di
lakukan
oleh
Endarwati dkk. (2014). Dari penelitiannya
menunjukkan bahwa Algoritma Evolution
Strategies
dapat
digunakan
untuk
menyelesaikan permasalahan pencarian
rute terpendek Delivery order.
Berdasarkan
pada
penelitian
sebelumnya, mengenai pencarian rute
terpendek maka penulis akan melakukan
penelitian tentang “Pencarian Rute
Terpendek pada Studi Kasus Jalur
Perlombaan Robot Pemadam Api dengan
Algoritma Evolution Strategies “.
Perumusan Masalah B.
Berdasarkan uraian latar belakang di atas, dapat dirumuskan permasalahan penelitian pada tugas akhir ini yaitu bagaimana mengetahui rute terpendek pada jalur perlombaan robot pemadam api dengan menggunakan Algoritma Evolution Strategies.
Batasan Masalah C.
Adapun batasan masalah dalam penelitian ini sesuai dengan latar belakang yang sudah diuraikan, maka diperlukan pembatasan masalah sebagai berikut :
1. Data-data yang digunakan untuk mencari rute terpendek pada jalur perlombaan robot mencakup nilai rute yang ada pada jalur perlombaan. 2. Pencarian rute terpendek dengan
menggunakan Algoritma Evolution Strategies dimana akan mencari rute terpendek pada jalur perlombaan robot pemadam api.
3. Titik awal selalu dari 1 (satu). Tujuan Penelitian
D.
Berdasarkan latar belakang dan rumusan masalah yang telah dijelaskan di atas, maka disimpulkan tujuan dari penulisan
tugas akhir ini adalah untuk menentukan rute terpendek pada perlombaan robot pemadam api dari daerah awal sampai daerah tujuan yang dikehendaki menggunakan Algoritma Evolution Strategies.
II.
TINJAUAN PUSTAKA
Kajian Terdahulu
A.
Sebagai bahan pertimbangan dalam penelitian ini akan dicantumkan beberapa hasil penelitian terdahulu antara lain:
Endarwati dkk. (2014) dalam penelitiannya yang berjudul Pencarian Rute Optimum dengan Evolution Strategis. Delivery order merupakan salah satu layanan jasa pesan antar makanan siap saji yang cukup diminati masyarakat. Adanya layanan delivery order memberi kemudahan bagi konsumen dalam mendapatkan makanan. Salah satu perusahaan yang menggunakan layanan delivery order adalah Pizza Hut Delivery (PHD) Rungkut Yakaya Surabaya. Dalam melakukan pengantaran makanan, kurir perusahaan harus mengetahui rute yang harus dilewati. Pada pengujian sistem dalam penetuan rute optimum dengan menggunakan ES, dilakukan dengan 2 uji coba. Uji coba I yaitu pengaruh kombinasi ukuran populasi (miu) dan ukuran offspring (lamda) dilakukan pada generasi 100. Ukuran jumlah populasi yang digunakan adalah 5, 10, 25, 30, 35, 40, 45, dan 50. Sedangkan untuk ukuran jumlah offspring adalah 1,2,3,4,5,6,7,8,9, dan 10. Rata-rata nilai fitness tertinggi diperoleh ketika generasi berjumlah banyak yaitu 50 dan 100 generasi dengan rata-rata fitness sebesar 0.1932500. Sedangkan nilai fitness terkecil diperoleh pada saat jumlah generasi 10.
Vista dan Mahmudy (2015) dalam penelitiannya yang berjudul penerapan Algoritma Evolution Strategies untuk optimasi distribusi barang dua tahap. Permasalahan optimasi distribusi barang dua tahap diselesaikan dengan Algoritma Evolution Strategies menggunakan representasi kromosom permutasi dua segmen, dimana segmen pertama merepresentasikan jalur distribusi tahap 1 dan segmen kedua merepresentasikan jalur
distribusi tahap 2. Pada pengujian yang dilakukan pada kasus distribusi barang dua tahap dari 2 produsen ke 5 agen dan 10 sub agen diperoleh fitness solusi yang mendekati optimal sebesar 0,22441651705566. Fitness tersebut dihasilkan dari pengujian menggunakan parameter Algoritma Evolution Strategies, yaitu ukuran populasi 100, ukuran offspring (λ) 5µ, perbandingan mutasi segmen 1: segmen 2: segmen 1 dan 2 adalah 20:30:50, dan jumlah generasi 50. Hasil akhir dari penelitian ini adalah jalur distribusi barang dua tahap dengan biaya distribusi yang optimal.
Putri dkk. (2015) Dengan Penelitiannya yang Berjudul Optimasi Model Fuzzy AHP dengan Menggunakan Algoritma Evolution Strategies (Studi Kasus: Pemilihan Calon Penerima Beasiswa PTIIK Universitas Brawijaya). Dilakukan optimasi ini diharapkan dapat menghasilkan hasil seleksi yang lebih lebih baik. Data yang digunakan dalam penelitian ini adalah 30 data mahasiswa yang akan diseleksi. Proses Algoritma Evolution Strategies ini menggunakan representasi kromosom real-coded. Representasi kromosom disini mewakili batas interval dari tiap – tiap kriteria, metode mutasi yang digunakan adlah random mutation, dan dalam proses seleksi menggunakan seleksi elitism. Dari hasil penelitian didapatkan hasil paling optimal jumlah populasi 8 dan jumlah offspring 7 dengan 90 generasi menghasilkan rata – rata nilai fitness 0.97. Hasil akhir dari penelitian ini adalah perengkingan dari kromosom yang paling optimal.
Okada dkk. (2012) dengan penelitiannya yang berjudul Comparison of Evolution Strategy, Genetic Algorithm and Their Hybrids on Evolving Autonomous Game Controller Agents. Perbandingan dua (Algoritma Evolution Strategies dan Algoritma Genetika) dalam penelitian ini dicontohkan pada simulasi balap mobil CIG 2007 dan Mario AI 2009. Dalam aplikasi simulasi balap mobil, konvergen diamati pada Evolution Strategies, dan Algoritma Genetika mengungguli Evolution Strategies di separuh generasi terakhir. Selain itu penggabungan yang menggunakan Algoritma Genetika dan Evolution Strategies merupakan solusi terbaik
diantara seluruh solusi yang dihasilkan. Hasil ini menunjukkan kemampuan Algoritma Genetika pada pencarian dalam tahap awal dan kemampuan Evolution Strategies untuk pencarian. Dalam aplikasi Mario AI, Algoritma Genetika ini menunjukkan manfaat dalam percobaan ini. Operator campuran crossover dan mutasi Algoritma Genetik dapat berkontribusi dengan baik untuk mengeksplorasi ruang pencarian yang luas.
Algoritma Evolution
Strategies (ES)B.
Prosedur umum dalam ES dapat dinyatakan dengan istilah (μ,λ). Di mana μ adalah jumlah solusi awal atau populasi awal, sedangkan λ merupakan jumlah solusi yang dihasilkan dari generasi awal (offspring).
Karena ES lebih mengandalkan mutasi, maka proses rekombinasi tidak selalu digunakan. Secara umum terdapat empat tipe proses dari ES, yaitu :
- (μ,λ) - (μ/r, λ) - (μ + λ) - (μ/r + λ)
ES (μ,λ) tidak menggunakan rekombinasi dalam proses reproduksi. Seleksi menggunakan elitism selection hanya melibatkan individu dalam offspring, individu induk dalam populasi tidak dilibatkan. ES (μ/r,λ) serupa dengan ES (μ,λ) dengan tambahan melibatkan proses rekombinasi. ES (μ+ λ) tidak menggunakan rekombinasi dan proses seleksi menggunakan elitism selection melibatkan individu offspring dan induk (Mahmudy, 2013).
Apabila P(t) dan C(t) merupakan populasi (parents) dan offspring pada generasi ke-t maka siklus ES dapat dideskripsikan sebagai berikut : procedure EvolutionStrategies begin t = 0 inisialisasi P(t): generate μ individu
while (bukan kondisi berhenti) do
recombinasi: produksi C(t) P(t)
mutasi C(t)
seleksi P(t+1) dari P(t) dan C(t)
t = t + 1
end while end
Gambar 1 Procedure ES
Struktur Evolution Strategies (ES)
C.
Beberapa notasi digunakan oleh Evolution Strategies. μ (miu) menyatakan ukuran populasi (sama seperti popSize pada GAs). λ (lambda) menyatakan banyaknya offspring yang dihasilkan pada proses reproduksi (sama seperti crossover rate dan mutation rate pada GAs). Beberapa penelitian menyarankan besarnya nilai λ sebesar 7μ. Algoritma Evolution Strategies.
Secara umum struktur dari suatu algoritma genetika dapat mendefenisikan dengan langkah-langkah sebagai berikut:
1. Representasi kromosom
Kromosom tersusun dari sejumlah gen yang merepresentasikan variable-variable (Lange, 2007). Pada Algoritma Evolution Strategies, representasi kromosom di sertai dengan fungsi fitness yang menyatakan kebaikkan dari solusi, dan sigma (strategy parameter) yang menyatakan level mutasi.
Ada beberapa bentuk representasi kromosom, seperti representasi biner, integer, real, dan permutasi. Setiap gen pada kromosom berupa angka integer yang menyatakan nomer dari setiap node. Tabel 1 merupakan contoh representasi permutasi.
Tabel 1 Representasi Permutasi
2. Inisialisasi ini bertujuan untuk membangkitkan himpunan solusi baru secara acak yang terdiri dari sejumlah string kromosom dan ditempatkan pada penampungan yang disebut dengan populasi. Pada tahap ini miu (μ) yang menyatakan ukuran populasi harus ditentukan. Panjang string kromosom (stringLen) dihitung berdasarkan presisi variable dan solusi yang dicari (Mahmudy, 2013).
3. Evaluasi (Fungsi Fitness) merupakan
Node 1 2 3 4
ukuran dari kromosom, tujuan penelitian ini adalah untuk menyelesaikan masalah Pencarian Rute Terpendek pada Studi Kasus Jalur Perlombaan Robot Pemadam Api, ada pun untuk memenuhi tujuan ini di perlukan suatu fungsi evaluasi yang akan merepresentasikan solusi yang akan dibawa oleh Algoritma Evolution Strategies itu sendiri. Semakin besar nilai fitness-nya maka semakin baik pula solusi yang didapatkan. Pada penelitian ini akan menggunakan fungsi evaluasi sebagai berikut :
Fitness=1/f(x) (1) Keterangan :
f(x)= Total jarak
Dimana total jarak merupakan fungsi objektif yang di peroleh berdasarkan persamaan 2, sebagai berikut :
∑ (2) Keterangan :
n = Jumlah node dari awal ke node akhir J = Jarak antara node
4. Iterasi Pada proses ini akan dilakukan iterasi sebanyak inputan pengguna, yang berfungsi sebagai pencarian solusi optimum dari proses Algorithma Evolution Strategies, iterasi akan berhenti apabila iterasi mencapai nilai maksimum.
5. Reproduksi Proses reproduksi merupakan suatu proses dalam Algoritma Evolution Strategies untuk membentuk suatu individu baru. Reproduksi pada ES (µ+λ) hanya menggunakan proses mutasi. Metode mutasi exchange mutation bekerja dengan dua posisi (excanghe point / XP) secara random, kemudian menukarkan nilai pada posisi tersebut (Mahmudy, 2013). Proses mutasi dengan metode exchange mutation dijelaskan pada Gambar 2.
Gambar 2 Proses Exchange Mutation
Pada Algoritma Evolution Strategies individu yang dibangkitkan disertai dengan nilai strategy parameters yang
menyatakan level mutasi. Mekanisme self adaptation yang digunakan untuk mengontrol nilai strategy parameters menggunakan aturan 1/5, dimana nilai σ (strategy parameter) dinaikkan jika terdapat paling sedikit 1/5 atau 20% hasil mutasi yang menghasilkan individu yang lebih baik dari induknya atau parent, jika tidak maka nilai σ diturunkan. Nilai σ di naikkan dengan mengalikan σ dengan 1,1 dan diturunkan dengan mengalikan σ dengan 0,9. Sigma merupakan bilangan random dengan interval random yang telah di tetapkan sebelumnnya. (Mahmudy, 2013).
Pembentukkan offspring (λ) pada Evolution Strategies di sesuaikan dengan hasil kali antara populasi awal (µ) dengan suatu bilangan bulat. Secara rumus dapat di tuliskan seperti berikut. (Mahmudy, 2013). λ = C * μ (3) Keterangan : λ = offspring C = Bilangan bulat μ = Populasi
6. Seleksi menentukan individu mana yang akan dimasukkan pada populasi baru dan digunakan untuk pembentukan generasi selanjutnya. Semakin tinggi nilai fitness suatu individu, maka semakin besar kemungkinan untuk dipilih. Pada metode Evolution Strategies digunakan elitism selection.
III.
Metodologi penelitian
Pada bab ini akan dipaparkan metodologi penelitian yang terdiri dari beberapa sub bab yaitu berupa obyek dan lokasi penelitian, metode pengumpulan data, metode pengembangan sistem, dan kerangka pikir penelitian yang digunakan dalam menyelesaikan masalah penelitian. IV. PERANCANGAN DAN
IMPLEMENTASI
A. Perancangan Sistem
Pada tahap ini akan dibahas mengenai pengolahan data pada Pencarian Rute Terpendek pada jalur perlombaan robot pemadam api dengan menggunakan
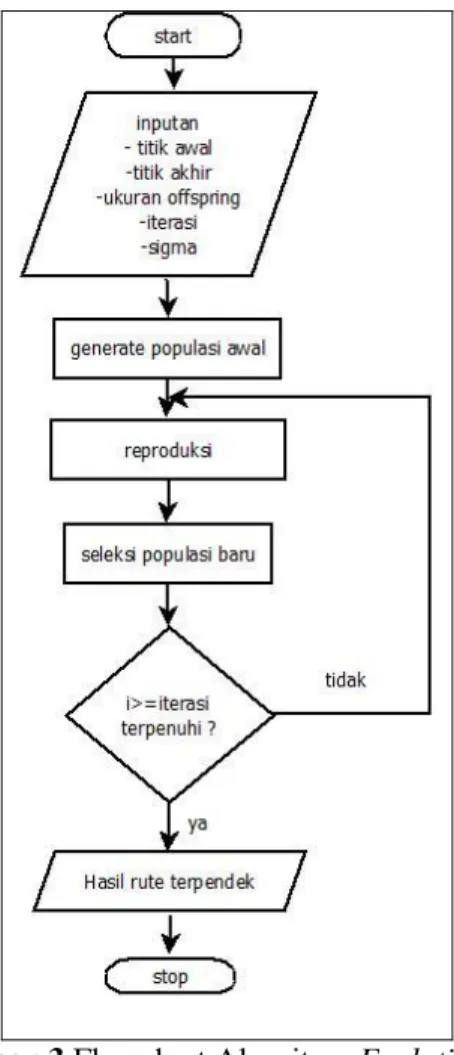
Algoritma Evolution Strategies. Pencarian rute akan dipresentasikan menggunakan Flowchart.
Gambar 3 Flowchart Algoritma Evolution Strategies
B.
Implementasi
Implementasi dan hasil tampilan dari pencarian rute terpendek pada jalur perlombaan robot pemadam api yang dibangun adalah sebagai berikut:
Gambar 17 Tampilan Utama Map
Gambar 18 Tampilan Proses ES
Gambar 20 Tampilan Titik
Gambar 21 Tampilan Update Titik
Gambar 22 Tampilan Change Password
V. HASIL DAN PEMBAHASAN A. Analisa Kebutuhan Data
Pada bab ini akan dijelaskan mengenai analisa dan pembahasan dari hasil penelitian yang dihasilkan. Analisa yang dilakukan pada bab ini adalah bagaimana mencari rute terpendek pada jalur perlombaan robot pemadam api dengan menggunakan Algoritma Evolution Strategies dengan 1 uji coba. Uji coba 1 yaitu menggunakan iterasi.
1. Hasil dan Analisa Uji Coba Iterasi Table 16 Hasil dan analisa uji coba iterasi
Ukuran Offspiin g Percobaan ke- Rata rata Fitness 1 2 3 4 5 6 7 8 9 10 1 0,00312 5 0,0031 3 0,0031 3 0,00312 5 0,00208 0,0031 3 0,0031 3 0,0031 3 0,0031 3 0,0031 3 0,03020 8 2 0,00312 5 0,0031 3 0,0031 3 0,00312 5 0,00312 5 0,0031 3 0,0031 3 0,0031 3 0,0031 3 0,0031 3 0,03125 3 0,00312 5 0,0031 3 0,0031 3 0,00208 0,00312 5 0,0031 3 0,0031 3 0,0031 3 0,0031 3 0,0031 3 0,03020 8 4 0,00312 5 0,0031 3 0,0031 3 0,00208 0,00312 5 0,0031 3 0,0031 3 0,0031 3 0,0031 3 0,0031 3 0,03020 8 5 0,00208 0,0031 3 0,0031 3 0,00312 5 0,00208 0,0031 3 0,0031 3 0,0031 3 0,0031 3 0,0031 3 0,02916 6
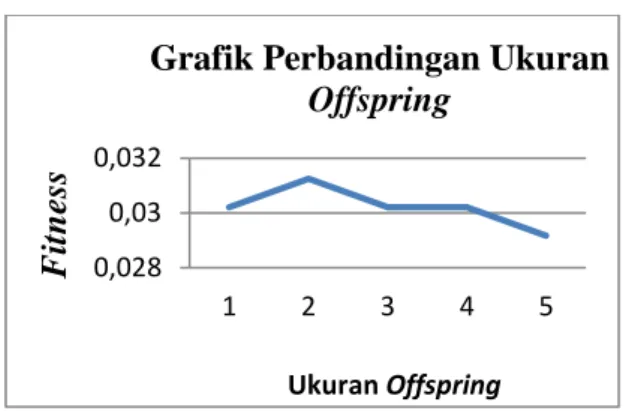
Pada uji coba offspring yang dilakukan di jalur 1 ke 20 dengan iterasi yang digunakan 20 dengan nilai sigma 2 dan nilai parent 4 didapatkan rata-rata fitness tertinggi pada ukuran offspring 2 dengan nilai fitness yaitu 0,03125 sedangkan fitness terendah pada ukuran offspring 5 dengan nilai fitness yaitu 0,029166.
Gambar 23 Grafik Perbandingan Ukuran Offspring
Pada Gambar 23 menunjukkan bahwa hasil perbandingan ukuran offspring terhadap nilai fitness cenderung tidak stabil atau naik turun. Hal ini menunjukkan bahwa jumlah offspring yang besar tidak menjamin menghasilkan nilai fitness yang besar, begitu
juga nilai offspring yang kecil juga tidak menjamin nilai fitness yang rendah. Hal ini disebabkan oleh faktor Algoritma Evolution Strategies yang bersifat acak, maka hasil fitness tidaklah tetap dan hasilnya bervariasi.
2. Solusi Optimum
Dalam penelitian pencarian rute terpendek pada jalur perlombaan robot pemadam api dengan menggunakan Algoritma Evolution Strategies. Dengan uji offspring sebanyak 5 kali dan di lakukan percobaan sebanyak 10 kali, maka dapat hasil fitness rata-rata untuk jalur 1 ke 20 adalah 1-2-3-4-8-21-20 adalah 0,003125 berdasarkan nilai inputan offspring adalah 2dan iterasi 20. Tabel 17 Solusi optimum rute terpendek
p1 Total
jarak Fitness sigma
60 30 90 90 30 20 0 0 0 0 0 0 0 0 0 0 0
320 0,003125 2
1 2 3 4 8 21 20 9 10 11 12 13 15 18 19 29 22 25
Daftar Pustaka
Endarwati, D.A., Mahmudy, W.F., dan Ratnawati, D.E., 2014, Pencarian rute optimum dengan Evolution Strategies, Jurnal Mahasiswa PTIIK Universitas Brawijaya, vol. 4, no. 1. Vista, C.A. dan Mahmudy, W.F., 2015,
Penerapan Algoritma Evolution Strategies untuk optimasi distribusi barang dua tahap, Jurnal Mahasiswa PTIIK Universitas Brawijaya, vol. 5, no. 11.
Putri, A.M.D.A., Mahmudy, W.F., dan Cholissodin, I., 2015, Optimasi model fuzzy AHP dengan menggunakan algoritma evolution strategies (studi kasus: pemilihan calon penerima beasiswa PTIIK Universitas Brawijaya), Jurnal Mahasiswa PTIIK Universitas Brawijaya, vol. 5, no. 15. Okada, H., Tokida, J., dan Fujii, Y., 2012,
Comparison of Evolution Strategy, Genetic Algorithm and Their Hybrids on Evolving Autonomous Game Controller Agents. International Journal Of Science and Engineering
Investigations. Department of Intelligent Systems, Faculty of Computer Science and Engineering. Kyoto Sangyo University.
Sharma, Y, Saini, S.C , Bhandhari, M,. 2012, Comparison of Dijkstra’s Shortest Path Algorithm with Genetic Algorithm for Static and Dynamic Routing Network, Electronics Dept. University College of Engg. RTU, Kota.
Chen, Y., Shen, S., Chen, T., dan Yang, R., 2014, jalur Optimization Studi Kendaraan Evakuasi Berdasarkan algoritma Djikstra, Department of Engineering Physics, Tsinghua University. 0,028 0,03 0,032 1 2 3 4 5