1
BAB I
PENDAHULUAN
Pada bab ini akan dijelaskan tentang tujuan skripsi ini dibuat, latar belakang
permasalahan yang mendasari pembuatan skripsi, spesifikasi alat yang akan
direalisasikan dan sistematika penulisan skripsi.
1.1. Tujuan
Merancang sebuah robot beroda micromouse yang mampu menelusuri
sebuah labirin (maze) untuk menemukan suatu tempat tujuan tertentu yang
kemudian kembali ke tempat awal dengan rute seefisien mungkin dan
membandingkan kinerja antara algoritma flood-fill dengan algoritma backtracking
dalam pencarian jalur terpendek yang diimplementasikan pada robot.
1.2. Latar Belakang
Kompetisi Mobile Robot telah diadakan selama lebih dari 20 tahun, salah
satunya adalah kontes robot Micromouse yang pertama kali diadakan pada tahun
1977 di New York. Micromouse merupakan sebuah robot beroda yang didesain
untuk menyelesaikan permasalahan dalam mencari jalan keluar dari suatu labirin.
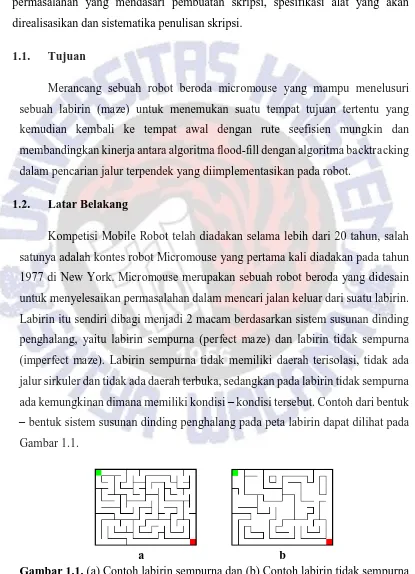
Labirin itu sendiri dibagi menjadi 2 macam berdasarkan sistem susunan dinding
penghalang, yaitu labirin sempurna (perfect maze) dan labirin tidak sempurna
(imperfect maze). Labirin sempurna tidak memiliki daerah terisolasi, tidak ada
jalur sirkuler dan tidak ada daerah terbuka, sedangkan pada labirin tidak sempurna
ada kemungkinan dimana memiliki kondisi – kondisi tersebut. Contoh dari bentuk – bentuk sistem susunan dinding penghalang pada peta labirin dapat dilihat pada Gambar 1.1.
a b
2
Dengan memanfaatkan berbagai macam algoritma pencarian jalur
terpendek yang telah ada, robot micromouse diyakini dapat menyelesaikan
permasalahan – permasalahan pada suatu sistem labirin. Masing – masing
algoritma tentunya memiliki tingkat kecepatan serta keakuratan tersendiri dalam
menyelesaikan permasalahan – permasalahan yang ada pada suatu sistem labirin.
Maka dari itulah pada skripsi ini akan dibandingkan antara 2 buah algoritma
pencarian jalur terpendek dimana keduanya akan diimplementasikan pada sebuah
robot micromouse untuk dilihat tingkat kemampuan, kecepatan serta keakuratan
dalam menyelesaikan beberapa macam bentuk peta labirin dengan tingkat
kerumitan tertentu baik itu perfect maze maupun imperfect maze. Algoritma yang
dipilih untuk dibandingkan adalah algoritma flood-fill dan algoritma bactracking
dimana keduanya memiliki kemampuan dalam menyelesaikan permasalahan di
dalam suatu peta labirin.
Berdasarkan hasil analisa yang pernah dilakukan oleh beberapa pihak,
algoritma flood-fill memiliki proses penyelesaian dimana langsung mengarah ke
tempat tujuan [1]. Sedangkan algoritma backtracking memiliki proses
penyelesaian dimana mencoba semua kemungkinan yang ada hingga
ditemukannya tempat yang dituju [2]. Melakukan pembandingan kinerja antara
kedua algoritma tersebut merupakan suatu langkah yang paling tepat untuk
mempermudah dalam menentukan algoritma mana yang paling efisien untuk
menyelesaikan permasalahan – permasalahan yang ada di dalam suatu peta
labirin.
1.3. Batasan Masalah
Berdasarkan Surat Tugas No : 61/I.3/FTEK/IX/2014 yang telah dikeluarkan
pada tanggal 4 September 2014, tugas akhir ini memiliki spesifikasi sebagai
berikut :
1. Peta labirin memiliki dimensi sekitar 185 cm (p) x 185 cm (l) x 10 cm (t)
dengan susunan sel 10 x 10 dan dapat diatur penempatan dinding
3
2. Robot memiliki bentuk fisik lingkaran dengan dimensi sekitar 12 cm (p) x
12 cm (l) x 7 cm (t).
3. Robot dapat mendeteksi adanya dinding labirin dengan jarak minimal
sebesar 3 cm dan jarak maksimal sebesar 12 cm.
4. Robot dapat bergerak dalam 4 kategori pergerakan, yaitu maju, putar balik,
belok kiri, dan belok kanan.
5. Robot mampu menghitung jarak yang telah ditempuh dimana jarak tersebut
direpresentasikan dalam satuan centimeter (cm).
6. Robot mampu menentukan arah mana yang harus dituju berdasarkan arah
mata angin.
7. Robot dapat beroperasi pada dua jenis algoritma, yaitu algoritma flood-fill
dan algoritma backtracking dimana keduanya dapat dipilih secara langsung
melalui human interface tanpa harus diprogram ulang.
8. Parameter yang digunakan untuk proses pengujian terhadap algoritma
flood-fill dan algoritma backtracking adalah waktu yang ditempuh dan jumlah sel
yang dilalui oleh robot dimana keduanya masing – masing dihitung pada
proses berangkat dan proses kembali sebanyak 3 kali pengujian.
1.4. Sistematika Penulisan
Tugas akhir ini terdiri dari 5 bab dengan garis besar isi masing – masing bab sebagai berikut :
1. BAB I : PENDAHULUAN
Membahas tujuan, latar belakang, batasan masalah, dan sistematika
penulisan.
2. BAB II : DASAR TEORI
Membahas kajian pustaka, teori tentang penerapan sensor pada robot
micromouse, perbandingan algoritma yang diterapkan secara teoritis, teori
4 3. BAB III : PERANCANGAN SISTEM
Membahas perancangan sistem yang meliputi mekanik sistem yang dibuat,
perangkat keras elektronik, dan perangkat lunak.
4. BAB IV : PENGUJIAN SISTEM
Membahas hasil pengujian sensor dan membandingkan hasil pengujian
algoritma flood-fill dengan algoritma backtracking yang telah diterapkan
pada robot micromouse dalam pencarian jalur terpendek.
5. BAB V : KESIMPULAN DAN SARAN
Berisi tentang kesimpulan yang diperoleh dari pengerjaan tugas akhir ini