Pemodelan Dinamik dan Simulasi dari Motor Induksi
Pemodelan Dinamik dan Simulasi dari Motor Induksi
Tiga Fasa Berdaya Kecil
Tiga Fasa Berdaya Kecil
Nyein Nyein Soe*, Thet Thet Han Yee*, Soe Sa
Nyein Nyein Soe*, Thet Thet Han Yee*, Soe Sa ndar Aung*ndar Aung*
*Electrical Power Engineering Department, Mandalay Technological University, Mandalay,
*Electrical Power Engineering Department, Mandalay Technological University, Mandalay, Myanmar Myanmar Diterjemahkan Oleh : Pradana Putradewa Jayawardana
Diterjemahkan Oleh : Pradana Putradewa Jayawardana##
# #
Jurusan Teknik Elektro, Fakultas Teknik Universitas
Jurusan Teknik Elektro, Fakultas Teknik Universitas DiponegoroDiponegoro Jalan Prof. Soedarto,SH Semarang Indonesia
Jalan Prof. Soedarto,SH Semarang Indonesia
Abstrak
Abstrak — Makalah ini mengemukakan simulasi dinamik dari — Makalah ini mengemukakan simulasi dinamik dari mo
mototor r ininduduksksi i beberdrdaya aya renrendadah h beberdrdasasararkakan n pempemodeodelalann matematis. Simulasi dinamik adalah salah satu langkah kunci matematis. Simulasi dinamik adalah salah satu langkah kunci dari pengesahan proses desain dari sistem pengendalian motor dari pengesahan proses desain dari sistem pengendalian motor dan ini dibutuhkan untuk mengeliminasi kesalahan desain yang dan ini dibutuhkan untuk mengeliminasi kesalahan desain yang tidak disengaja dan menghasilkan kekeliruan pada konstruksi tidak disengaja dan menghasilkan kekeliruan pada konstruksi dan
dan pengujpengujian ian prototprototype. Makalah ype. Makalah ini menunjukkan simulasini menunjukkan simulasii dar
dari i perperforforma ma keakeadaan daan tuntunak ak motmotor or indinduksuksi i menmengguggunaknakanan pr
progogram motoram motor r ininduduksksi i 3 3 fafasa sa 3 3 hp hp papada da MAMATLTLAB AB yayangng di
dimomodedelklkan an dadan n didisisimumulaslasikikan an memengnggugunanakakan n pepemomodeldelanan SIMULINK.
SIMULINK. Keywords
Keywords
—
—
motor induksi sangkar tupai, pemodelan danmotor induksi sangkar tupai, pemodelan dan simulasi, software MATLAB, torsi, kecepatansimulasi, software MATLAB, torsi, kecepatan
I.
I. PEPENDNDAHAHULULUAUANN Seb
Sebuah uah motmotor or indinduksuksi i secsecara ara sedsederherhana ana adaadalah lah sesebuabuahh tra
transfnsformormatoator r dendengan gan ranrangkagkaian ian magmagnetnetikniknya ya dipdipisaisahkahkann dengan sela udara menjadi dua bagian bergerak, satu sebagai dengan sela udara menjadi dua bagian bergerak, satu sebagai ku
kumpmpararan an prprimimer er dadan n yayang ng lalaininnynya a sesebabagagai i kukumpmpararanan sekunder. Arus bolak-balik dialirkan menuju kumparan primer sekunder. Arus bolak-balik dialirkan menuju kumparan primer dari tenaga
dari tenaga listrlistrik ik yang mengindukyang menginduksi si arus sebaliknyarus sebaliknya a padapada kum
kumparparan an seksekundunder, er, saasaat t ujuujungnngnya ya dihdihubuubung ng sinsingkagkat t ataatauu dis
disambambung ung melmelalualui i imeimedandansi si ekseksterternalnal. . GerGerakaakan n relrelatiativeve ant
antara ara strstruktuktur ur priprimer mer dan dan seksekundunder er dipdiprodroduksuksi i oleoleh h gaygayaa ele
elektrktromaomagnegnetik tik sessesuai uai daydayanyanya a yanyang g kemkemudiudian an dipdipindindahah melalui celah udara oleh induksi.
melalui celah udara oleh induksi. Cir
Cirri ri utautama ma yanyang g memmembedbedakaakan n mesmesin in indinduksuksi i dardari i tiptipee motor listrik yang
motor listrik yang lain adalah arus lain adalah arus sekunsekunder yang der yang diciptdiciptakanakan semata-mata oleh induksi, seperti pada transformator alih-alih semata-mata oleh induksi, seperti pada transformator alih-alih disuplai oleh eksitasi DC atau sumber tenaga luar yang lain, disuplai oleh eksitasi DC atau sumber tenaga luar yang lain, seperti pada mesin sinkron atau
seperti pada mesin sinkron atau mesin DC.mesin DC. Ran
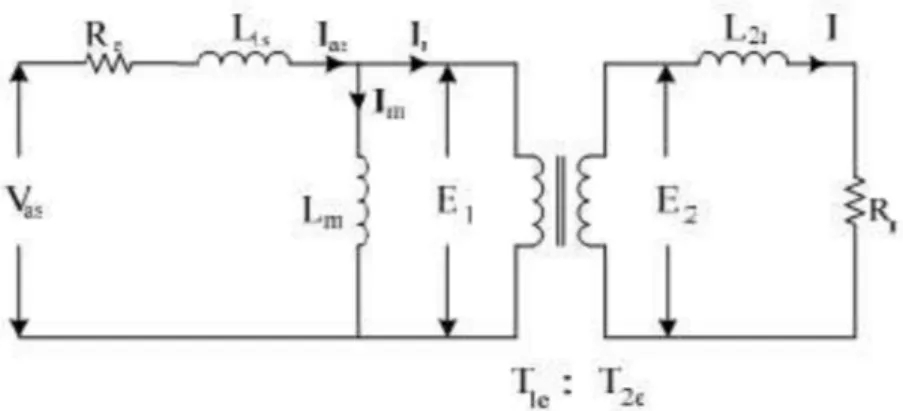
Rangkagkaian ian ekuekuivaivalen len dardari i motmotor or indinduksuksi i sansangat gat mirmiripip den
dengan gan tratransfnsformormatoator. r. WalWalaupaupun un aruarus s rotrotor or berberada ada padpadaa freku
frekuensi slip, ensi slip, rotor tergabunrotor tergabung g ke ke dalam rangkadalam rangkaian ian dengadengann jalan yang mudah. Motor induksi tiga fasa adalah motor yang jalan yang mudah. Motor induksi tiga fasa adalah motor yang pa
paling ling banbanyak yak digdigunaunakan kan padpada a aplaplikaikasi si indindusustry try karkarenaena desa
desainnya yang innya yang sedesederhanarhana, , operaoperasi si yang handal, yang handal, konstrkonstruksiuksi ya
yang ng kakasasar, r, bibiaaya ya awawal al yayang ng rerendndaah, h, mumudadah h dadalalamm peng
pengoperaoperasian sian dan dan perawperawatanatannya nya sedesederhanarhana, , efisieefisiensi nsi tiggitiggi,, dan memiliki gigi control yang sederhana untuk starting dan dan memiliki gigi control yang sederhana untuk starting dan pe
pengongontrntrolaolan n keckecepaepatantan. . MotMotor or indinduksuksi i tertersedsedia ia dendengangan karak
karakteristeristik tik torsi yang torsi yang cocococok k untuk berbagauntuk berbagai i aplikaplikasi yangasi yang luas. Selain itu, motor induksi sangkar tupai memiliki lebih luas. Selain itu, motor induksi sangkar tupai memiliki lebih
banya
banyak k keuntkeuntungan dibandinungan dibandingkan tipe gkan tipe wound rotor. wound rotor. Motor Motor ind
indukuksi si sasangngkakar r babajijing ng mememimililiki ki efefisisieiensnsi i lelebibih h tintinggggi,i, perawatan lebih sedikit, factor ruang yang lebih baik pada slot perawatan lebih sedikit, factor ruang yang lebih baik pada slot
dan harganya lebih rendah. [1] dan harganya lebih rendah. [1]
Gambar 1 Rangkaian ekuivalen dasar
Gambar 1 Rangkaian ekuivalen dasar untuk motor induksiuntuk motor induksi
II.
II. PENGUPENGUKURAKURAN DARN DARI PARI PARAMETER AMETER MOTOR MOTOR A.
A. ReResissistantansi si StaStator tor
Dengan rotor saat diam, resistansi fasa stator diukur dengan Dengan rotor saat diam, resistansi fasa stator diukur dengan menerapkan tegangan DC dan arus akhir. Ketika prosedur ini menerapkan tegangan DC dan arus akhir. Ketika prosedur ini hanya memberika
hanya memberikan n resisresistansi DC tansi DC saat temperatusaat temperatur r tertetertentu,ntu, res
resististansansi i AC AC harharus us dihdihituitung ng dendengan gan memmemperpertimbtimbangangkankan ukuran kabel, frekuensi stator, dan temperatur operasi.
ukuran kabel, frekuensi stator, dan temperatur operasi. B
B.. TeTes Tas Tanpnpa Bea Bebabann
Motor induksi dikemudikan dengan kecepatan sinkron oleh Motor induksi dikemudikan dengan kecepatan sinkron oleh mot
motor or lailainnynnya, a, biabiasansanya ya motmotor or DC. DC. KemKemudiudian an stastator tor di- di-energize
energize dendengan gan menmengapgapliklikasiasikan kan tegtegangangan an nomnominainal l saasaatt frekuensi nominal. Daya masukan tiap fasa kemudian diukur. frekuensi nominal. Daya masukan tiap fasa kemudian diukur. C.
C. TeTes Rots Rotor-or-TerTerkunkuncici
Rotor dari motor induksi dikunci untuk menjaga agar tetap Rotor dari motor induksi dikunci untuk menjaga agar tetap dia
diam m dadan n tetegagangngan an rerendndah ah tigtiga a fafasa sa didigugunanakakan n ununtutuk k men
menghighituntung g aruarus s nomnominainal l stastatortor. . DayDaya a masmasukaukan n tiatiap p fasfasaa diukur bersa
diukur bersama tegangan dan ma tegangan dan arus stator. Slip tidak ada arus stator. Slip tidak ada padapada kondis
kondisi i rotor rotor terkunterkunci ci sehinsehingga gga rangkarangkaiannyiannya a menyemenyerupairupai transformator yang sekundernya dihubung singkatkan.
transformator yang sekundernya dihubung singkatkan.
III.
III. PERHITUNGAN PERFORMA PERHITUNGAN PERFORMA KEADAAN TUNAK KEADAAN TUNAK DARI MOTOR INDUKSI
Parameter yang dihubungkan untuk perhitungan performa Parameter yang dihubungkan untuk perhitungan performa ke
keadadaaaan n tutunanak k dadari ri momototor r ininduduksksi i dididadapapat t dadari ri hahasisill percobaan. Karakteristik torsi-kecepatan, karakteristik percobaan. Karakteristik torsi-kecepatan, karakteristik
daya-kec
kecepaepatantan, , karkaraktakterierististik k efiefisiesiensinsi-ke-kecepcepataatan n dardari i motmotor or ind
induksuksi, i, dan dan besbesar ar aruarus s stastator tor dan dan rotrotor or ditditunjunjukkukkan an padpadaa makalah ini.
makalah ini.
TABEL 1 TABEL 1
PARAMETER MASUKAN MOTOR INDUKSI PARAMETER MASUKAN MOTOR INDUKSI
A.
A. KarakKarakteristeristik Torsitik Torsi-Kece-Kecepatan dari Motpatan dari Motor Induksor Induksii Torsi beban penuh,
Torsi beban penuh,
(1) (1) Torsi maksimum, Torsi maksimum, (2) (2) Dengan, s = slip beban penuh pada motor
Dengan, s = slip beban penuh pada motor
Gambar 2 Karakteristik torsi-slip dari motor induksi Gambar 2 Karakteristik torsi-slip dari motor induksi
B.
B. KaraKarakterikteristik Daystik Daya-Keca-Kecepataepatan dari Motor Indun dari Motor Induksiksi Daya = ω
Daya = ωmmTT ((33))
Dengan, kecepatan rotor Dengan, kecepatan rotor
(4) (4)
Gambar 3 Karakteristik daya-slip
C.
C. BesaBesar Arus Sr Arus Stator ptator pada Moada Motor Indutor Induksiksi
Gambar 4 Karakteristik arus stator-slip dari
Gambar 4 Karakteristik arus stator-slip dari motor induksimotor induksi
D.
D. EfisiEfisiensi densi dari Mari Motor Inotor Induksduksii
Pada motor induksi, rugi-rugi tembaga, rugi-rugi inti dan Pada motor induksi, rugi-rugi tembaga, rugi-rugi inti dan ges
gesekaekan, n, dan dan rugrugi-rui-rugi gi kumkumparparan an akaakan n tamtampakpak. . RugRugi-rui-rugigi tembaga dan rugi-rugi inti ada pada stator, rugi-rugi tembaga tembaga dan rugi-rugi inti ada pada stator, rugi-rugi tembaga dan rugi gesekan ada pada rotor. Sebenarnya ada dan rugi gesekan ada pada rotor. Sebenarnya ada rugi-rugi inti yang kecil pada rotor. Pada kondisi operasi, walaupun rugi inti yang kecil pada rotor. Pada kondisi operasi, walaupun rot
rotor or frefrekuekuensi nsi sansangat gat renrendah dah yanyang g secsecara ara loglogisnisnya ya dapdapatat diasumsikan bahwa semua rugi-rugi inti hanya ada di stator. diasumsikan bahwa semua rugi-rugi inti hanya ada di stator. Ef
Efisisieiensnsi i dadari ri momototor r ininduduksksi i dadapapat t diditetentntukukan an dedengnganan mem
membebbebani ani motmotor or dan dan menmengukgukur ur masmasukaukan n dan dan kelkeluaruaranan secara langsung.
secara langsung.
(5) (5)
Gambar 5 Karakteristik
Gambar 5 Karakteristik efisiensi-kecepatan dari motor induksiefisiensi-kecepatan dari motor induksi
E.
E. BesaBesar Arur Arus Rotos Rotor pada r pada Motor Motor IndukInduksisi
Gambar 6 Karakteristik arus rotor-kecepatan dari motor induksi Gambar 6 Karakteristik arus rotor-kecepatan dari motor induksi
IV
IV.. PERHITUNGAN PERFORMA PERHITUNGAN PERFORMA KEADAAN TUNAK KEADAAN TUNAK DARI MOTOR INDUKSI
DARI MOTOR INDUKSI
Slip dipilih pada kecepatan rotor karena tidak berdimensi Slip dipilih pada kecepatan rotor karena tidak berdimensi dan bias diterapkan pada berbagai frekuensi motor. Dengan dan bias diterapkan pada berbagai frekuensi motor. Dengan dengan kecepatan sinkron, pada slip rendah, torsinya linear dengan kecepatan sinkron, pada slip rendah, torsinya linear dan proporsional terhadap slip; diatas torsi maksimum, torsi dan proporsional terhadap slip; diatas torsi maksimum, torsi kira-kira sebanding dengan kebalikan slip. [3]
kira-kira sebanding dengan kebalikan slip. [3]
Diagram alir untuk mengevaluasi performa kondisi tunak Diagram alir untuk mengevaluasi performa kondisi tunak dari motor ditunjukkan pada Gambar 7. Karakteristik torsi-slip dari motor ditunjukkan pada Gambar 7. Karakteristik torsi-slip ditunjukkan dari poin -1 hingga 1.
ditunjukkan dari poin -1 hingga 1. Torsi maksimu
Torsi maksimum m untuk motor induksi adalah saat untuk motor induksi adalah saat posisposisii slip 0,2 seperti ditunjukkan pada Gambar 2. Nilai terendah slip 0,2 seperti ditunjukkan pada Gambar 2. Nilai terendah dari torsi timbul saat titik slip -0,2.
V
V.. SIMULASIMULASI DINAMISI DINAMIK DARI MOTK DARI MOTOR INDOR INDUKSI TIGUKSI TIGAA FASA
FASA Mod
Model el dindinamiamik k dardari i mesmesin in indinduksuksi i diudiuat at dendengan gan modmodelel SIMULIN
SIMULINK. K. Torsi, kecepaTorsi, kecepatan, dan tan, dan arus rotor arus rotor dihasdihasilkan dariilkan dari model ini.
model ini.
Gambar 7 Diagram blok SIMULINK dari motor induksi tiga fasa Gambar 7 Diagram blok SIMULINK dari motor induksi tiga fasa
T TABLEABLEIIII
PARAMETER BLOK DARI MOTOR INDUKSI PARAMETER BLOK DARI MOTOR INDUKSI
Motor tiga induksi tiga fasa memiliki kelas 3 hp, 380 V, Motor tiga induksi tiga fasa memiliki kelas 3 hp, 380 V, 1425 rpm disuplai oleh inverter SPWM. Frekuensi dasar dari 1425 rpm disuplai oleh inverter SPWM. Frekuensi dasar dari si
sinunus s rerefefererensnsi i adadalalah ah 50 50 Hz Hz ininveverterter r PWPWM M seselulururuhnhnyaya diban
dibangun gun dengadengan n standstandard ard blok blok SIMULISIMULINK. NK. KeluaKeluarannyrannyaa menuju blok Sumber Tegangan Terkontrol sebelum digunakan menuju blok Sumber Tegangan Terkontrol sebelum digunakan blok kumparan stator pada mesin asinkron. Rotor pada mesin blok kumparan stator pada mesin asinkron. Rotor pada mesin
dihubung singkatkan. Kebocoran induktansi stator L
dihubung singkatkan. Kebocoran induktansi stator Llsls diseteldisetel
dua kali dari nilai sebenarnya dengan menyimulasikan efek dua kali dari nilai sebenarnya dengan menyimulasikan efek dari
dari penepenempatampatann smoo smoothing thing reacreactor tor antarantara a inverinverter ter dengadengann mesin. Torsi beban yang digunakan pada batang mesin adalah mesin. Torsi beban yang digunakan pada batang mesin adalah konstan dan menyetel ke nilai nominalnya yaitu 11,9 Nm. konstan dan menyetel ke nilai nominalnya yaitu 11,9 Nm.
Motor distart dari kondisi
Motor distart dari kondisi diam. Referensi kecepatan diseteldiam. Referensi kecepatan disetel pada 1,0 pu, atau 1425 rpm. Kecepatan ini dicapai setelah 0,8 pada 1,0 pu, atau 1425 rpm. Kecepatan ini dicapai setelah 0,8
s. s.
De
Derarau u yayang ng didititimbmbululkakan n ololeh eh ininvevertrter er PWPWM M jujugaga diobservasi pada gelombang torsi elektromagnetik T
diobservasi pada gelombang torsi elektromagnetik Tcc. Akan. Akan
te
tetatapipi, , ininerersisia a momototor r memengnganantitisisipapasi si dederarau u inini i dadariri kemunculannya pada bentuk gelombang kecepatan motor. kemunculannya pada bentuk gelombang kecepatan motor.
VI.
VI. KECEPATAN ROTOR DARI MOTOR KECEPATAN ROTOR DARI MOTOR INDUKSIINDUKSI Gambar 8 menampilkan kurva rotor-kecepatan dari motor Gambar 8 menampilkan kurva rotor-kecepatan dari motor indu
induksi ksi tigtiga a fasfasa a (tip(tipee wound rotor wound rotor ). ). BerdaBerdasarkasarkan n gambagambar r te
tersrsebebutut, , kekececepapatatan n rorototor r memeninningkgkat at bebertartahahap p memenunujuju kecepatan nominal. Kecepatan nominal adalah 1425 rpm dan kecepatan nominal. Kecepatan nominal adalah 1425 rpm dan dicapai dalam waktu sekitar 0,8 detik.
dicapai dalam waktu sekitar 0,8 detik.
Gambar 8 Kecepatan rotor dari motor induksi tiga fasa Gambar 8 Kecepatan rotor dari motor induksi tiga fasa
VI
VII.I. RERESPSPOON AN ARURUS RS ROOTOTOR DR DAN AN STSTATATOOR DR DAARIRI MOTOR INDUKSI TIGA FASA
MOTOR INDUKSI TIGA FASA
Gambar 9 arus rotor dan stator
Gambar 9 arus rotor dan stator dari motor induksi 3 fasadari motor induksi 3 fasa
Respon arus rotor dan stator dari motor induksi tiga fasa Respon arus rotor dan stator dari motor induksi tiga fasa digambarkan pada Gambar 9. Arus rotor berfluktuasi antara 0 digambarkan pada Gambar 9. Arus rotor berfluktuasi antara 0 hingga 0,6 detik. Arus stator digambar antara 10 A saat 0,8 hingga 0,6 detik. Arus stator digambar antara 10 A saat 0,8 detik seperti ditunjukkan pada gambar ini.
detik seperti ditunjukkan pada gambar ini. V
VIIIII.I. RERESSPOPON WN WAKAKTU TU DDARARI TI TOORSRSII ELEKTROMAGNETIK PADA MOTOR INDUKSI ELEKTROMAGNETIK PADA MOTOR INDUKSI
TIGA FASA TIGA FASA
Pada Gambar 10, respon waktu dari torsi elektromagnetik Pada Gambar 10, respon waktu dari torsi elektromagnetik p
paadda a mmoottoor r iinndduukkssi i tigtiga a ffaassa a ddininyyaattaakkaann. . TToorrssii elekt
elektromagromagnetik dari netik dari motor induksi tiga motor induksi tiga fasa pada fasa pada awalawalnyanya berkisar 0 pada 0,4 detik. Lalu, torsi nominal dicapai saat 0,8 berkisar 0 pada 0,4 detik. Lalu, torsi nominal dicapai saat 0,8 detik. Torsi nominal dapat dilihat sebesar 11,9 Nm seperti detik. Torsi nominal dapat dilihat sebesar 11,9 Nm seperti ditunjukkan pada Gambar 10.
ditunjukkan pada Gambar 10.
Gambar 10 respon waktu
Gambar 10 respon waktu torsi elektromagnetik dari motor induksitorsi elektromagnetik dari motor induksi
R
R EFERENEFERENSISI
[1]
[1] R.KR.K.Ra.Rajpujput, “Elt, “Electectricrical Maal Machichinesnes,” fir,” first edist editiotion, n, New YoNew York: Mrk: McGrcGrawaw Hill, 1993, pp. 352-353
Hill, 1993, pp. 352-353 [2]
[2] R.KrisR.Krishnanhnan, “El, “Electric ectric MotoMotor Drivr Drives Moes Modelindeling, Ang, Analysialysis and s and ContControl”,rol”, first edition, 2001 PrenticeHall International, Inc. Upper Saddle River, first edition, 2001 PrenticeHall International, Inc. Upper Saddle River, New Jersey 07458.
New Jersey 07458. [3]
[3] StephStephen D.en D.UmansUmans, “ E, “ Electrilectric Mac Machinechinery”, ry”, fourtfourth edh editioition, Mcn, McGraw-HGraw-Hillill Series in Electrical