Design and Numerical Anlysis Power Management
System AUV (Autonomus Underwater Vehicle) with
PID Control
Hendro Nurhadi, Mirza Ghulam Indralaksana Abstract - AUV is underwater vehicle capable
moving in the water automatically without direct human control. AUV usually used for underwater exploration of natural resources, predict the coming of an earthquake, and useful for petroleum exploration on seabed. For underwater exploration with a depth up to 300 m with 10-hour operating, monitoring is required in careful, precise, and accurate so AUV able to move automatically without any human control. Moreover AUV required optimal control power to perform forward motion (surge) against the barriers in the subsurface ocean to make an efficient battery. The method that we use to optimizing power consumption of AUV is PID Control. Analyse result prove that PID control can reduce power consumption of AUV and able to control AUV speed at 4 knot (2 m/s) although there is obstacle like drag force, frictional resistance and underwater current.
Keywords - AUV, Power, PID, Resistance, Battery
PENDAHULUAN
Indonesia merupakan negeri dengan wilayah perairan yang luas. Di dalamnya terkandung potensi alam yang melimpah seperti garam, terumbu karang, minyak bumi, serta ribuan spesies ikan dengan berbagai macam bentuk dan warnanya. Namun, kurangnya perhatian pemerintah membuat potensi perairan menjadi sirna, bahkan menjadi milik negara lain. Minyak jutaan liter di bawah laut mampu ditemukan oleh perusahaan asing dengan perangkat eksplorasi canggih, sehingga menjadi hak miliknya. Ribuan spesies hayati laut masih menjadi misteri kekayaan laut Indonesia sedang menunggu untuk diteliti dan dimanfaatkan demi kesejahteraan masyarakat.
Disamping potensi kekayaan yang terkandung di dalamnya, laut juga menjadi lawan bagi masyarakat pesisir pantai. Bencana alam berupa tsunami di Aceh dan Pangandaran menjadi pelajaran yang bagi negeri ini. Terjadinya retakan lempeng bumi mampu menyebabkan gempa di laut dalam sehingga menyebabkan air naik setinggi 300-350 meter dan menghempaskan bumi serambi mekah rata dengan tanah. Gempa
di Jogja, Padang dan Sulawesi juga terjadi akibat gesekan lempeng bumi dibawah laut. Indonesia sering terjadi gempa karena merupakan pertemuan tiga lempeng.
Untuk menjawab tantangan alam dalam pengoptimalkan potensi laut, para peneliti mengembangkan Remote Operated Vehicle (ROV) dan Autonomus Underwater Vehicle (AUV) sebagai alat untuk mengekplorasi benda-benda di laut. AUV adalah kendaraan bawah air yang mampu bergerak didalam air secara otomatis tanpa adanya kontrol langsung dari manusia. ROV adalah kendaraan bawah air yang gerakannya dikendalikan secara langsung oleh manusia melalui remote control dari atas permukaan air. Untuk eksplorasi bawah laut dengan kedalaman hingga 300 m diperlukan pemantauan kondisi bawah laut secara teliti, tepat, akurat dan mampu bergerak secara otomatis tanpa kendali manusia. Oleh karena itu penelitian kali ini akan menggunakan AUV sebagai sarana untuk eksplorasi bawah laut. Hal ini disebabkan AUV mampu bergerak otomatis serta tidak menggunakan remote dan kabel dalam pengoprasiannya
Tujuan dari penelitian ini adalah untuk merancang (menentukan batasan) konsumsi tenaga dan jenis sumber tenaga (baterai) AUV yang mampu bergerak terhadap pengaruh-pengaruh hidrodinamika dibawah permukaan air laut dan merancang dan menganalisa power management system pada AUV meliputi kecepatan putaran motor, gaya thrust dan kebutuhan daya motor, yang mengalami pengaruh arus bawah laut (under water current) agar tetap bergerak dengan kecepatan (surge) stabil menggunakan metode PID.
METODE PENELITIAN
Dalam penelitian ini dilakukan perhitungan kebutuhan energi pada AUV rancangan kami untuk menentukan sumber energi (baterai) yang optimal sesuai dengan kebutuhan. Perancangan AUV dilakukan menggunakan software MAXSURF (gambar 1). Setelah menentukan sumber energi yang tepat, maka mulai dibuat Power Management System berbasis pada
simulasi menggunakan Simulink (MATLAB 2009b).
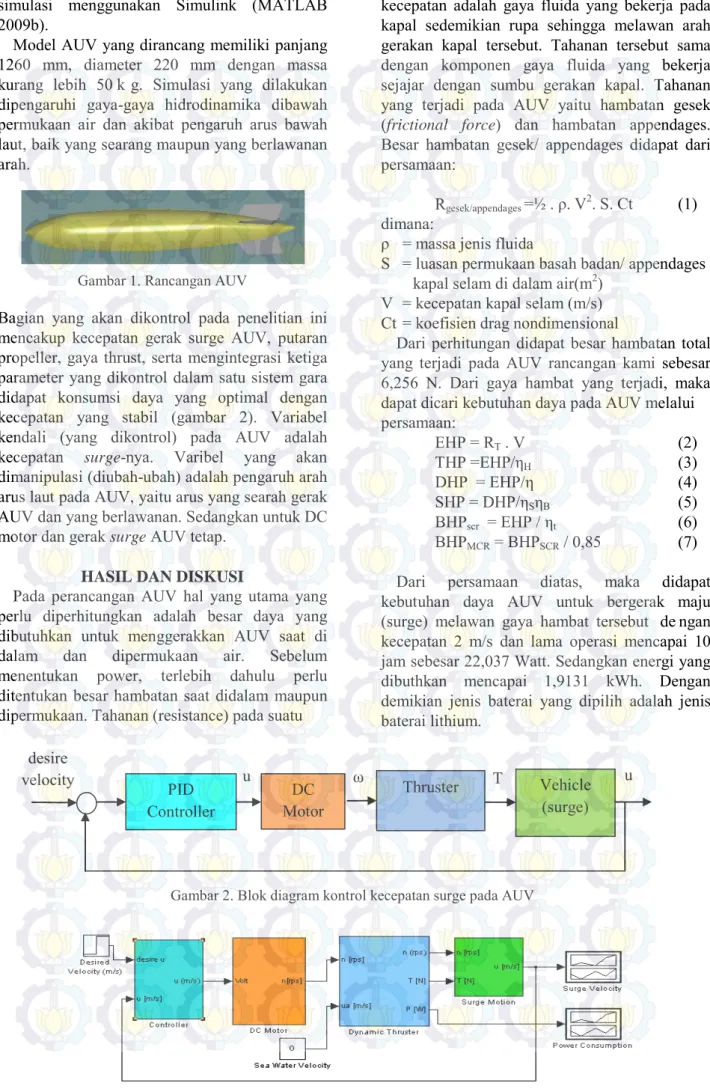
Model AUV yang dirancang memiliki panjang 1260 mm, diameter 220 mm dengan massa kurang lebih 50 k g. Simulasi yang dilakukan dipengaruhi gaya-gaya hidrodinamika dibawah permukaan air dan akibat pengaruh arus bawah laut, baik yang searang maupun yang berlawanan arah.
Gambar 1. Rancangan AUV
Bagian yang akan dikontrol pada penelitian ini mencakup kecepatan gerak surge AUV, putaran propeller, gaya thrust, serta mengintegrasi ketiga parameter yang dikontrol dalam satu sistem gara didapat konsumsi daya yang optimal dengan kecepatan yang stabil (gambar 2). Variabel kendali (yang dikontrol) pada AUV adalah kecepatan surge-nya. Varibel yang akan dimanipulasi (diubah-ubah) adalah pengaruh arah arus laut pada AUV, yaitu arus yang searah gerak AUV dan yang berlawanan. Sedangkan untuk DC motor dan gerak surge AUV tetap.
HASIL DAN DISKUSI
Pada perancangan AUV hal yang utama yang perlu diperhitungkan adalah besar daya yang dibutuhkan untuk menggerakkan AUV saat di dalam dan dipermukaan air. Sebelum menentukan power, terlebih dahulu perlu ditentukan besar hambatan saat didalam maupun dipermukaan. Tahanan (resistance) pada suatu
kecepatan adalah gaya fluida yang bekerja pada kapal sedemikian rupa sehingga melawan arah gerakan kapal tersebut. Tahanan tersebut sama dengan komponen gaya fluida yang bekerja sejajar dengan sumbu gerakan kapal. Tahanan yang terjadi pada AUV yaitu hambatan gesek (frictional force) dan hambatan appendages. Besar hambatan gesek/ appendages didapat dari persamaan:
Rgesek/appendages =½ . ρ. V2. S. Ct (1)
dimana:
ρ = massa jenis fluida
S = luasan permukaan basah badan/ appendages kapal selam di dalam air(m2)
V = kecepatan kapal selam (m/s) Ct = koefisien drag nondimensional
Dari perhitungan didapat besar hambatan total yang terjadi pada AUV rancangan kami sebesar 6,256 N. Dari gaya hambat yang terjadi, maka dapat dicari kebutuhan daya pada AUV melalui persamaan: EHP = RT . V (2) THP =EHP/ηH (3) DHP = EHP/η (4) SHP = DHP/ηSηB (5) BHPscr = EHP / ηt (6) BHPMCR = BHPSCR / 0,85 (7)
Dari persamaan diatas, maka didapat kebutuhan daya AUV untuk bergerak maju (surge) melawan gaya hambat tersebut de ngan kecepatan 2 m/s dan lama operasi mencapai 10 jam sebesar 22,037 Watt. Sedangkan energi yang dibuthkan mencapai 1,9131 kWh. Dengan demikian jenis baterai yang dipilih adalah jenis baterai lithium.
Gambar 3. Pemodelan kontrol kecepatan surge AUV dengan MATLABSimulink
desire velocity u ω T u PID Controller Motor DC Vehicle (surge) Thruster
Berdasarkan blok diagram Gambar 2, maka akan dibuat pemodelan menggunakan MATLAB Simulink. Gambar 3 menunjukkan pemodelan sistem konsumsi energi pada AUV. Pada pemodelan untuk gaya thrust dari propeller AUV diambil dari persamaan 8. Masukan sistem ini berupa putaran motor serta arus laut, dengan keluaran berupa gaya thrust.
(8) Kebutuhan daya (P) pada AUV bergantung pada putaran propeller, torsi (Q) dan arus laut. Besar daya yang dibutuhkan akan dikendalikan AUV dapat bergerak dengan kecepatan konstan (2 m/s) meski ada pengaruh arus laut.
Q = ρ.D5.β
2.ω.|ω| - ρ.D4.β1.ua/(1+Ap) (9)
P = ρ.D5.β
2.ω.|ω| - ρ.D4.β1.ua/(1+Ap)(2.π.ω) (10)
Pemodelan dibuat berdasarkan persamaan 2.29. Masukan sistem berupa putaran (n) dari motor DC dan gaya thrust pada propeller (XTR).
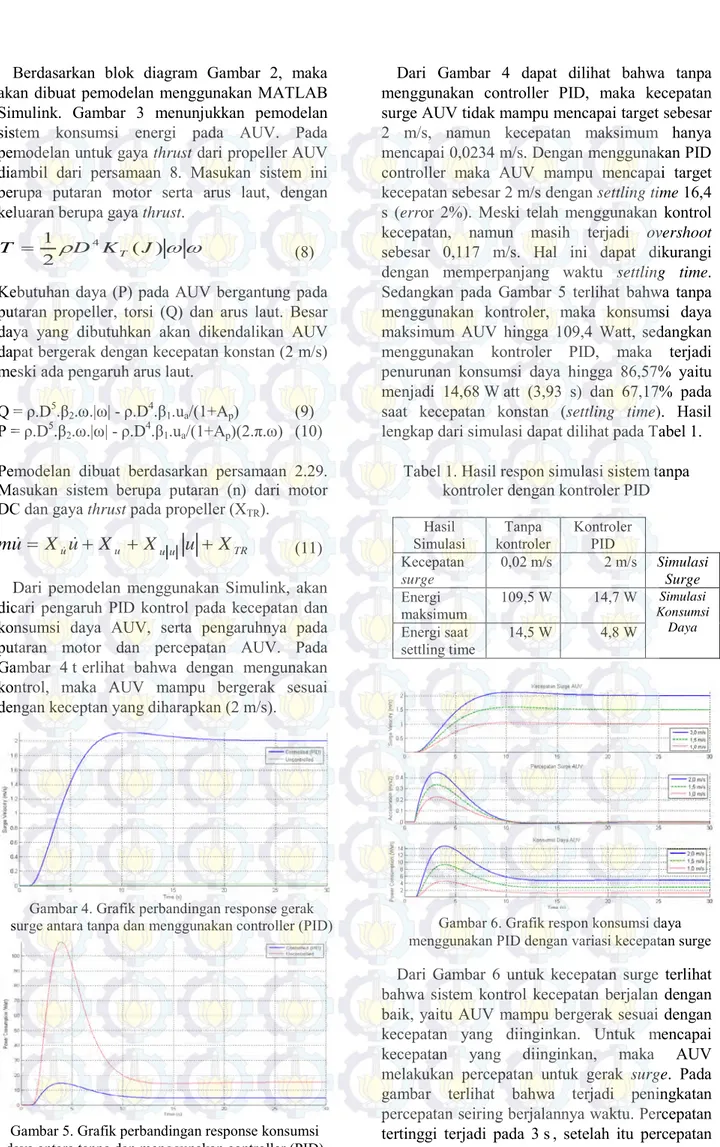
(11) Dari pemodelan menggunakan Simulink, akan dicari pengaruh PID kontrol pada kecepatan dan konsumsi daya AUV, serta pengaruhnya pada putaran motor dan percepatan AUV. Pada Gambar 4 t erlihat bahwa dengan mengunakan kontrol, maka AUV mampu bergerak sesuai dengan keceptan yang diharapkan (2 m/s).
Dari Gambar 4 dapat dilihat bahwa tanpa menggunakan controller PID, maka kecepatan surge AUV tidak mampu mencapai target sebesar 2 m/s, namun kecepatan maksimum hanya mencapai 0,0234 m/s. Dengan menggunakan PID controller maka AUV mampu mencapai target kecepatan sebesar 2 m/s dengan settling time 16,4 s (error 2%). Meski telah menggunakan kontrol kecepatan, namun masih terjadi overshoot sebesar 0,117 m/s. Hal ini dapat dikurangi dengan memperpanjang waktu settling time. Sedangkan pada Gambar 5 terlihat bahwa tanpa menggunakan kontroler, maka konsumsi daya maksimum AUV hingga 109,4 Watt, sedangkan menggunakan kontroler PID, maka terjadi penurunan konsumsi daya hingga 86,57% yaitu menjadi 14,68 W att (3,93 s) dan 67,17% pada saat kecepatan konstan (settling time). Hasil lengkap dari simulasi dapat dilihat pada Tabel 1.
Tabel 1. Hasil respon simulasi sistem tanpa kontroler dengan kontroler PID
Dari Gambar 6 untuk kecepatan surge terlihat bahwa sistem kontrol kecepatan berjalan dengan baik, yaitu AUV mampu bergerak sesuai dengan kecepatan yang diinginkan. Untuk mencapai kecepatan yang diinginkan, maka AUV melakukan percepatan untuk gerak surge. Pada gambar terlihat bahwa terjadi peningkatan percepatan seiring berjalannya waktu. Percepatan tertinggi terjadi pada 3 s , setelah itu percepatan AUV menurun hingga 0 saat kecepatan surge
Hasil
Simulasi kontroler Tanpa Kontroler PID Kecepatan surge 0,02 m/s 2 m/s Simulasi Surge Energi maksimum 109,5 W 14,7 W Simulasi Konsumsi Daya Energi saat settling time 14,5 W 4,8 W ω ω ρ ( ) 2 1 4 J K D T = T TR u u u u
u
X
X
u
X
X
u
m
=
+
+
+
Gambar 4. Grafik perbandingan response gerak surge antara tanpa dan menggunakan controller (PID)
Gambar 5. Grafik perbandingan response konsumsi daya antara tanpa dan menggunakan controller (PID)
Gambar 6. Grafik respon konsumsi daya menggunakan PID dengan variasi kecepatan surge
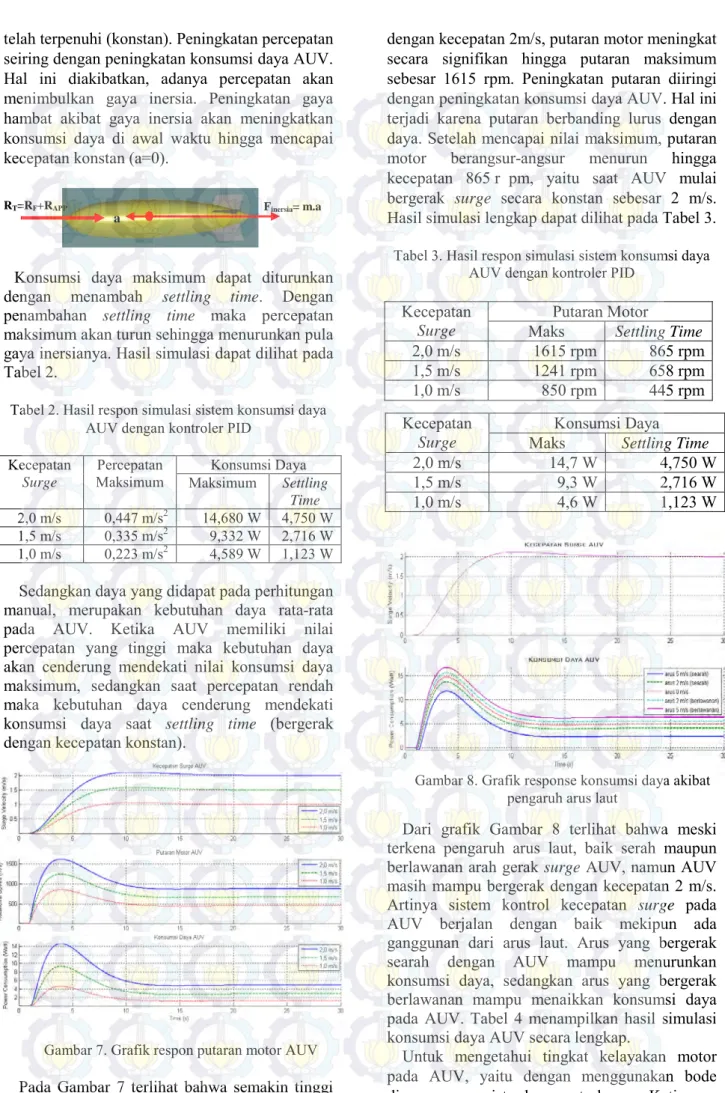
telah terpenuhi (konstan). Peningkatan percepatan seiring dengan peningkatan konsumsi daya AUV. Hal ini diakibatkan, adanya percepatan akan menimbulkan gaya inersia. Peningkatan gaya hambat akibat gaya inersia akan meningkatkan konsumsi daya di awal waktu hingga mencapai kecepatan konstan (a=0).
Konsumsi daya maksimum dapat diturunkan dengan menambah settling time. Dengan penambahan settling time maka percepatan maksimum akan turun sehingga menurunkan pula gaya inersianya. Hasil simulasi dapat dilihat pada Tabel 2.
Tabel 2. Hasil respon simulasi sistem konsumsi daya AUV dengan kontroler PID
Kecepatan Surge
Percepatan
Maksimum Maksimum Konsumsi Daya Settling Time 2,0 m/s 0,447 m/s2 14,680 W 4,750 W
1,5 m/s 0,335 m/s2 9,332 W 2,716 W
1,0 m/s 0,223 m/s2 4,589 W 1,123 W
Sedangkan daya yang didapat pada perhitungan manual, merupakan kebutuhan daya rata-rata pada AUV. Ketika AUV memiliki nilai percepatan yang tinggi maka kebutuhan daya akan cenderung mendekati nilai konsumsi daya maksimum, sedangkan saat percepatan rendah maka kebutuhan daya cenderung mendekati konsumsi daya saat settling time (bergerak dengan kecepatan konstan).
Pada Gambar 7 terlihat bahwa semakin tinggi kecepatan AUV, maka semakin tinggi putaran motor. Pada saat awal AUV akan bergerak
dengan kecepatan 2m/s, putaran motor meningkat secara signifikan hingga putaran maksimum sebesar 1615 rpm. Peningkatan putaran diiringi dengan peningkatan konsumsi daya AUV. Hal ini terjadi karena putaran berbanding lurus dengan daya. Setelah mencapai nilai maksimum, putaran motor berangsur-angsur menurun hingga kecepatan 865 r pm, yaitu saat AUV mulai bergerak surge secara konstan sebesar 2 m/s. Hasil simulasi lengkap dapat dilihat pada Tabel 3.
Tabel 3. Hasil respon simulasi sistem konsumsi daya AUV dengan kontroler PID
Dari grafik Gambar 8 terlihat bahwa meski terkena pengaruh arus laut, baik serah maupun berlawanan arah gerak surge AUV, namun AUV masih mampu bergerak dengan kecepatan 2 m/s. Artinya sistem kontrol kecepatan surge pada AUV berjalan dengan baik mekipun ada ganggunan dari arus laut. Arus yang bergerak searah dengan AUV mampu menurunkan konsumsi daya, sedangkan arus yang bergerak berlawanan mampu menaikkan konsumsi daya pada AUV. Tabel 4 menampilkan hasil simulasi konsumsi daya AUV secara lengkap.
Untuk mengetahui tingkat kelayakan motor pada AUV, yaitu dengan menggunakan bode diagram, nyquist dan root locus. Ketiganya merupakan metode untuk mengetahui kestabilan suatu sistem. Pengujian pertama menggunakan
Kecepatan Surge
Putaran Motor
Maks Settling Time
2,0 m/s 1615 rpm 865 rpm 1,5 m/s 1241 rpm 658 rpm 1,0 m/s 850 rpm 445 rpm Kecepatan Surge Konsumsi Daya Maks Settling Time
2,0 m/s 14,7 W 4,750 W
1,5 m/s 9,3 W 2,716 W
1,0 m/s 4,6 W 1,123 W
RT=RF+RAPP
a Finersia= m.a
Gambar 7. Grafik respon putaran motor AUV
Gambar 8. Grafik response konsumsi daya akibat pengaruh arus laut
bode diagram yang hasilnya dapat dilihat pada Gambar 9.
Tabel 4. Hasil respon simulasi sistem konsumsi daya AUV dengan kontroler PID
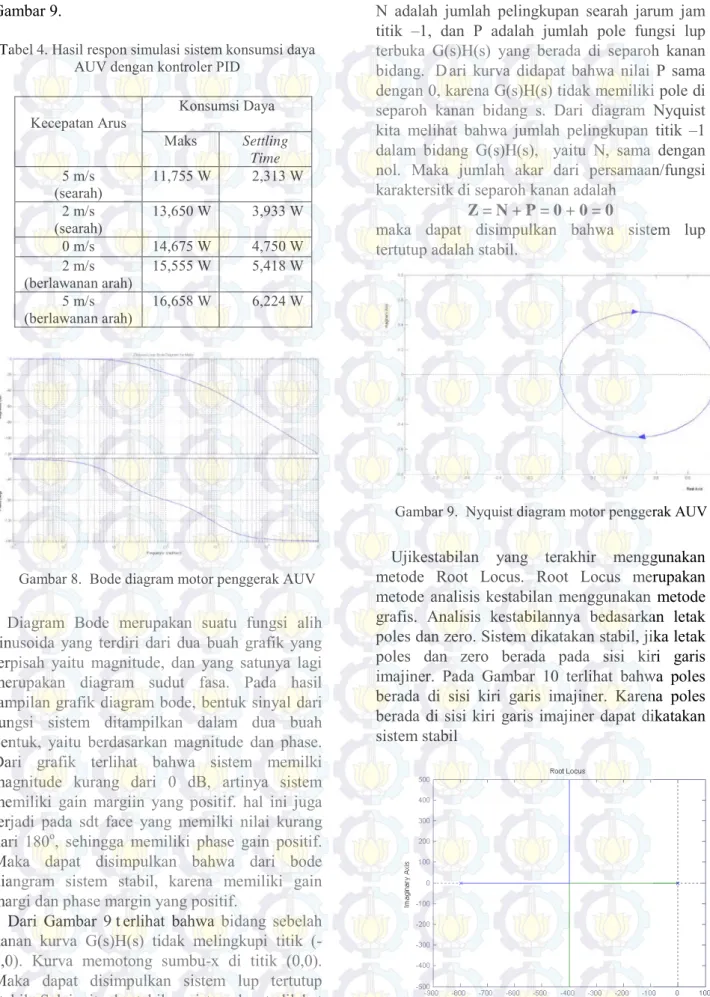
Diagram Bode merupakan suatu fungsi alih sinusoida yang terdiri dari dua buah grafik yang terpisah yaitu magnitude, dan yang satunya lagi merupakan diagram sudut fasa. Pada hasil tampilan grafik diagram bode, bentuk sinyal dari fungsi sistem ditampilkan dalam dua buah bentuk, yaitu berdasarkan magnitude dan phase. Dari grafik terlihat bahwa sistem memilki magnitude kurang dari 0 dB, artinya sistem memiliki gain margiin yang positif. hal ini juga terjadi pada sdt face yang memilki nilai kurang dari 180o, sehingga memiliki phase gain positif.
Maka dapat disimpulkan bahwa dari bode diangram sistem stabil, karena memiliki gain margi dan phase margin yang positif.
Dari Gambar 9 t erlihat bahwa bidang sebelah kanan kurva G(s)H(s) tidak melingkupi titik (-1,0). Kurva memotong sumbu-x di titik (0,0). Maka dapat disimpulkan sistem lup tertutup stabil. Selain itu kestabilan sisten dapat dilahat dari nilai Z, yaitu jumlah akar persamaan karakteristik sistem yang berada separoh kanan bidang kompleks. Kurva akan stabil jika nilai Z=0.
Z = N+P
N adalah jumlah pelingkupan searah jarum jam titik –1, dan P adalah jumlah pole fungsi lup terbuka G(s)H(s) yang berada di separoh kanan bidang. Dari kurva didapat bahwa nilai P sama dengan 0, karena G(s)H(s) tidak memiliki pole di separoh kanan bidang s. Dari diagram Nyquist kita melihat bahwa jumlah pelingkupan titik –1 dalam bidang G(s)H(s), yaitu N, sama dengan nol. Maka jumlah akar dari persamaan/fungsi karaktersitk di separoh kanan adalah
Z = N + P = 0 + 0 = 0
maka dapat disimpulkan bahwa sistem lup tertutup adalah stabil.
Ujikestabilan yang terakhir menggunakan metode Root Locus. Root Locus merupakan metode analisis kestabilan menggunakan metode grafis. Analisis kestabilannya bedasarkan letak poles dan zero. Sistem dikatakan stabil, jika letak poles dan zero berada pada sisi kiri garis imajiner. Pada Gambar 10 terlihat bahwa poles berada di sisi kiri garis imajiner. Karena poles berada di sisi kiri garis imajiner dapat dikatakan sistem stabil
KESIMPULAN
Kecepatan Arus Konsumsi Daya Maks Settling Time 5 m/s (searah) 11,755 W 2,313 W 2 m/s (searah) 13,650 W 3,933 W 0 m/s 14,675 W 4,750 W 2 m/s (berlawanan arah) 15,555 W 5,418 W 5 m/s (berlawanan arah) 16,658 W 6,224 W
Gambar 8. Bode diagram motor penggerak AUV
Gambar 9. Nyquist diagram motor penggerak AUV
Konsumsi daya AUV berasal dari daya peralatan pendukung, propulsi dan sensor. Kebutuhan daya untuk peralatan pendukung dan sensor mencapai 109 Watt, sedangkan kebutuhan daya motor untuk sistem propulsi mencapai 82,31 Watt. Kebutuhan daya total AUV sebesar 191,31 Watt. Dengan waktu operasinal mencapai 10 jam kerja, maka kebutuhan energi AUV sebesar 1,9131 kWh. Sumber energi yang digunakan untuk memenuhi kebutuhan suplai energi pada AUV adalah baterai jenis lithium.
Penggunaan kontroler berupa PID mampu mengendalikan kecepatan surge pada AUV sesuai dengan kecepatan yang diinginkan. Adanya kontroler mampu menurunkan konsumsi daya AUV mencapai 86,57% pada saat maksimum dan 67,17% pada saat settling time dengan kecepatan gerak surge sebesar 2 m/s. Selain itu, penggunaan kontroler PID mampu membuat AUV bergerak konstan dengan kecepatan 2 m/s meski mendapat gangguan dari arus laut, baik yang searah maupun berlawanan dengan arah gerak AUV. Arus laut yang searah dengan gerak AUV dapat menurunkan konsumsi daya, sebaliknya arus laut yang berlawana dengan gerak AUV dapat meningkatkan konsumsi daya. Konsumsi daya maksimum terjadi saat percepatan maksimum yaitu sebesar 14,7 Watt dengan kecepatan 2 m/s. Percepatan yang terjadi menyebabkan timbulnya gaya inersia. Gaya inersia muncul saat AUV mulai bergerak dari keadaan diam hingga mencapai kecepatan konstan, setelah AUV bergerak konstan maka gaya inersia akan hilang. Hilangnya gaya inersia akan menurunkan konsumsi daya pada AUV. Hasil uji kestabilan pada motor penggerak AUV dengan menggunakan metode bode diagram, nyquist dan root locus menunjukkan bahwa sistem motor penggerak AUV stabil.
DAFTAR PUSTAKA
1. Nurul, Muhammad. 2010. S istem Navigasi pada Wahana Bawah Air Tanpa Awak. PENS ITS.
2. Bradley, Albert M., Michael D. Feezor, Hanumant Singh, and F. Yates Sorrell. 2001. Power Systems for Autonomous Underwater Vehicles. IEEE Journal of Oceanic Engineering, Vol. 26, No. 4, October 2001. 3. Hasvold, Oistein, Nils J. Storkersen, Sissel
Forseth, Torleif Lian. 2005. Power sources for autonomous underwater vehicles. Journal of Power Sources 162 (2006) 935–942 Science Direct.
4. Linden, David. 1984. Handbook of batteries and fuel cells. New York : McGraw-Hill.
5. Edward V. 1988. Principles of Naval Architecture Volume II: Resistance, Propulsion and Vibration. English: Society of Naval Architects & Marine Engineers 6.
http://id.wikipedia.org/wiki/Berkas:Pid-feedback-nct-int-correct.png. Diakses tanggal 25 Maret 2011.
7. Kim, Jinhyun, Wan Kyun Chung. 2005. Accurate and Prctical Thruster Modeling for Under Water Vehicle. Robotics & Bio-Mechatronics Lab. Pohang Univ. of Sci. & Tech. (POSTECH), Pohang, 790-784, Korea (Republic of )
8. Allmendinger, E. Eugene. 1990. Submersible Vehicle Systems Design. English: Society of N aval Architects & Marine Engineers
9. Chanop Silpa, Anan. 2001. Autonomous Underwater Robot: Vision and Control. The Australian National University.
10. Harvald, Sv. A. 1992. Resistance and propulsion of ships. Krieger PublicationLewis.
11. Longoriay, Raul G., Jonathan LeSagez, William Shutt. 2010. Modeling and Requirements Formulation for Submarine Control Surface Actuation Systems. University of Texas, Austin, USA