ESTIMASI MODEL KEBUTUHAN TRANSPORTASI
MENGGUNAKAN DATA ARUS LALU LINTAS PADA
KONDISI PEMILIHAN RUTE KESEIMBANGAN
Rusmadi Suyuti
Staf Pengajar Jurusan Teknik Sipil Universitas Muhammadiyah Jakarta
Jln. Cempaka Putih Tengah 27, Jakarta Pusat –10510 Telp: (021) 4288 2505 Fax: (021) 425 6023
E-mail: rusmadisuyuti@yahoo.com
Ofyar Z. Tamin
Staf Pengajar dan Peneliti Departemen Teknik Sipil Institut Teknologi Bandung Jalan Ganesha 10, Bandung 40132 Telp: (022) 250 2350 Fax: (022) 251 2395
E-mail: ofyar@trans.si.itb.ac.id
Abstrak
Masalah-masalah yang timbul di dalam sistem transportasi memerlukan Matriks Asal-Tujuan (MAT) sebagai input utama yang merepresentasikan pola perjalanan pada suatu wilayah perencanaan. Metode untuk mendapatkan MAT dapat dikelompokkan menjadi Metode Konvensional dan Metode berdasarkan data arus lalu lintas (biasanya disebut Metode Tidak Konvensional). Metode Tidak Konvensional merupakan suatu metode estimasi yang cukup efektif dan ekonomis karena data utama yang dibutuhkannya adalah data arus lalu lintas yang untuk memperolehnya membutuhkan biaya yang murah, banyak tersedia dan mudah didapat. MAT yang dihasilkan dari data arus lalu lintas selanjutnya dapat dibedakan menjadi dua kondisi yaitu MAT pada kondisi saat ini dan MAT yang diprediksi untuk masa mendatang. Estimasi MAT pada kondisi saat ini digunakan sebagai input dalam memprakirakan MAT di masa mendatang. Salah satu cara yang dapat dilakukan adalah dengan memodelkan perilaku kebutuhan transportasi di dalam wilayah studi. Tujuan penelitian ini adalah melanjutkan pengembangan metode estimasi model kebutuhan transportasi berdasarkan informasi data arus lalu lintas, dalam meninjau faktor-faktor yang berpengaruh terhadap keakurasian MAT. Model yang dikembangkan selanjutnya di uji menggunakan data Kota Bandung dan sekitarnya. Hasil yang diperoleh menunjukkan bahwa MAT hasil estimasi menunjukkan tingkat kesesuaian yang tinggi terhadap MAT hasil pengamatan. Metode uji statistik yang digunakan adalah: Root Mean Square Error (RMSE), Mean Absolute Error (MAE), Normalised Mean Absolute Error (NMAE) dan Koefisien Determinasi (R2
dan SR2). Hasil penelitian menyimpulkan bahwa model GO selalu menghasilkan arus lalu lintas hasil estimasi yang terbaik. Jika dipertimbangkan beberapa kriteria tambahan, maka secara keseluruhan metode estimasi yang terbaik adalah kombinasi antara model GR dengan metode estimasi KTB. Disamping itu, dari hasil yang diperoleh, penggunaan metode pemilihan rute keseimbangan mempunyai pengaruh yang sangat signifikan jika dibandingkan dengan penggunaan metode all-or-nothing.
Kata-kata kunci: model kebutuhan transportasi, arus lalu lintas, model estimasi, model gravity, model pemilihan rute
PENDAHULUAN
Pada hampir seluruh aplikasi perencanaan transportasi, input data yang paling sulit dan mahal diperoleh adalah matriks asal-tujuan (MAT). Metode yang telah dikembangkan untuk mendapatkan MAT secara garis besar dikelompokkan menjadi 2 (dua) yaitu metode konvensional dan metode tidak konvensional. Metode konvensional untuk mendapatkan MAT dilakukan melalui survei wawancara rumah tangga atau survei wawancara di tepi jalan. Survei tersebut biasanya memerlukan biaya yang besar, tenaga surveyor yang banyak, ketelitian yang tinggi dalam pengolahan data, waktu yang lama serta umumnya mengganggu pengguna jalan.
Untuk mengatasi kendala tersebut, telah dikembangkan metode lain yaitu metode tidak konvensional. Metode tersebut menggunakan informasi data arus lalulintas di ruas jalan untuk memperkirakan MAT.
MAT yang dihasilkan dari informasi arus lalu lintas selanjutnya dapat dibedakan menjadi 2 (dua) kondisi yaitu MAT yang ada pada kondisi saat ini dan MAT yang diprediksi untuk menggambarkan kondisi pergerakan di masa mendatang. Pada kasus pertama, MAT menggambarkan pola perjalanan pada kondisi yang berlaku saat ini. Sedangkan pada kasus kedua, prediksi tata guna lahan dan sosial ekonomi diperlukan untuk memprakirakan MAT di masa mendatang, dan selanjutnya untuk menghasilkan prakiraan arus lalu lintas di masa mendatang. Estimasi MAT pada kondisi saat ini diperlukan untuk menyelesaikan banyak tugas-tugas di bidang manajemen transportasi. Disamping itu MAT tersebut juga digunakan sebagai input dalam memprakirakan MAT di masa mendatang untuk keperluan perencanaan transportasi. Salah satu cara yang dapat dilakukan untuk memprakirakan MAT masa mendatang adalah dengan memodelkan perilaku lalu lintas atau kebutuhan transportasi di dalam wilayah studi.
Pada penelitian sebelumnya, Tamin (1988) dan Tamin et al, (2000) telah mengembangkan suatu metode estimasi model kebutuhan transportasi dengan menggunakan model sebaran pergerakan Gravity (GR) dan Gravity-Opportunity (GO). Sedangkan metode estimasi yang digunakan mengkalibrasi parameter model tersebut adalah metode Kuadrat-Terkecil (KT) dan Kemiripan-Maksimum (KM), Inferensi-Bayes (IB) dan Entropi-Maksimum (EM). Disamping itu juga ditinjau faktor-faktor pengaruh lainnya, seperti: lokasi terbaik data arus lalu lintas, jumlah optimum data arus lalu lintas, pengaruh tundaan di simpang, pengaruh fluktuasi arus lalu lintas serta kombinasi model Sebaran Pergerakan-Pemilihan Moda.
Kedua metode terdahulu tersebut menggunakan teknik pemilihan rute proporsional, dimana proporsi pemilihan rute ( pidl ) tidak tergantung pada volume arus lalu lintas. Contoh yang paling umum untuk jenis ini adalah pemilihan rute all-or-nothing. Metode tersebut membuat proses estimasi menjadi lebih sederhana karena nilai plid dapat diestimasi sebelumnya dan secara tersendiri (independent). Meskipun demikian pada kondisi di wilayah perkotaan dimana sering terjadi kemacetan, teknik pemilihan rute proporsional tersebut menjadi kurang realistis.
Berdasarkan kondisi tersebut, maka penelitian ini bertujuan untuk melanjutkan penelitian-penelitian terdahulu, khususnya dengan cara mengembangkan teknik pemilihan rute tidak proporsional seperti pemilihan rute keseimbangan (equilibrium assignment)
untuk menentukan nilai l id
p . Dengan metode ini nilai l id
p tidak dapat diestimasi sebelumnya, karena merupakan fungsi dari arus lalu lintas. Penggunaan metode pemilihan rute tidak proporsional tersebut mengakibatkan proses iterasi menjadi lebih kompleks dan lebih lama.
METODOLOGI STUDI Metodologi Penelitian
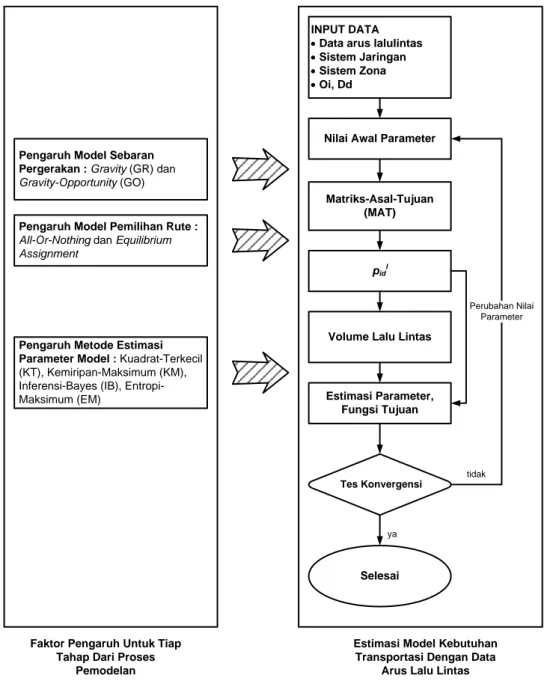
Metodologi ini disusun agar setiap tahap kegiatan dari proses penelitian ini dapat berjalan dengan baik, sehingga dapat mencapai tujuan penelitian yang telah ditetapkan sebelumnya. Secara umum, metodologi ini dapat dilihat dalam bagan alir pada Gambar 1. Pengaruh Model Sebaran Pergerakan
Model Gravity (GR)
Pada model gravity penyebaran pergerakan didasarkan pada aksesibilitas, bangkitan dan tarikan dari zona asal ke zona tujuan. Gambaran tingkat kemudahan dalam
mencapai zona tujuan dalam model ini dinyatakan dalam fungsi biaya perjalanan atau fungsi hambatan (impedance function). Model ini diilhami oleh konsep hukum gravity
Newton (Tamin, 2000).
Estimasi Model Kebutuhan Transportasi Dengan Data
Arus Lalu Lintas Faktor Pengaruh Untuk Tiap
Tahap Dari Proses Pemodelan
pidl
Tes Konvergensi
Selesai Volume Lalu Lintas
Estimasi Parameter, Fungsi Tujuan Perubahan Nilai Parameter ya tidak Matriks-Asal-Tujuan (MAT) Nilai Awal Parameter INPUT DATA
•Data arus lalulintas
•Sistem Jaringan
•Sistem Zona
•Oi, Dd
Pengaruh Metode Estimasi Parameter Model : Kuadrat-Terkecil (KT), Kemiripan-Maksimum (KM), Inferensi-Bayes (IB), Entropi-Maksimum (EM)
Pengaruh Model Sebaran Pergerakan : Gravity (GR) dan Gravity-Opportunity (GO)
Pengaruh Model Pemilihan Rute : All-Or-Nothing dan Equilibrium Assignment
Gambar 1 Metodologi Penelitian
Persamaan model gravity adalah sebagai berikut: ) ( . . . . d i d id i id O D A B f C T = (1) dengan:
(
)
∑
= i id d d i C f D B A ) ( 1 (2)( )
(
)
∑
= d id i i d C f O A B 1 (3)Tid = jumlah pergerakan dari zona asal i ke zona tujuan d
Ai ; Bd = faktor penyeimbang masing-masing untuk setiap asal i dan tujuan d
Oi = total pergerakan dari zona asal i Dd = total pergerakan ke zona tujuan d
f(Cid) = fungsi umum biaya perjalanan / fungsi hambatan
Persamaan fungsi hambatan diantaranya adalah:
Fungsi Pangkat : f
( )
Cid =Cid−α (4) Fungsi eksponensial : Cid id e C f( )= −β (5) Fungsi Tanner : Cid id id C e C f( )= α. −β (6)Model Gravity-Opportunity (GO)
Tamin (2000) menyatakan bahwa model Intervening-Opportunity telah dikembangkan oleh Stouffer pada tahun 1940, dengan mengasumsikan bahwa jumlah pergerakan dari suatu zona asal ke zona tujuan adalah berbanding lurus dengan jumlah kesempatan pada zona tujuan, dan berbanding terbalik dengan jumlah kesempatan-antara.
Jadi, model Gravity kurang memperhatikan efek Intervening, sedangkan model Opportunity tidak memperhatikan efek aksesibilitas, sehingga secara logis, model yang ideal akan diperoleh dengan menggabungkan kedua efek tersebut dalam satu model, yaitu model Gravity-Opportunity (GO). Bentuk dasar model GR dan IO bisa didapat sebagai kasus khusus. Jadi pemilihan antara pendekatan model GR atau IO diputuskan secara empirik dan statistik dengan menggunakan batasan parameter yang mengontrol bentuk fungsi mekanisme penyebaran pergerakan.
Tamin (2000) mengusulkan formulasi model GO sebagai berikut:
id d i d i id O D A B f T = . . . . (7) dengan: i
A dan Bd didefinisikan sebagai persamaan (2) dan (3)
[
]
∑
− = j ij i jd id δ .F f 1 (8) ( )ε,μ 1 ( )ε,μ − =∑
∑
j− p ip j p ip ij U U F (9)(
)
( ) ( )[
1 ε Ω Φ]
exp ip ip ip .α .D β .C U = − − (10)[
]
∑
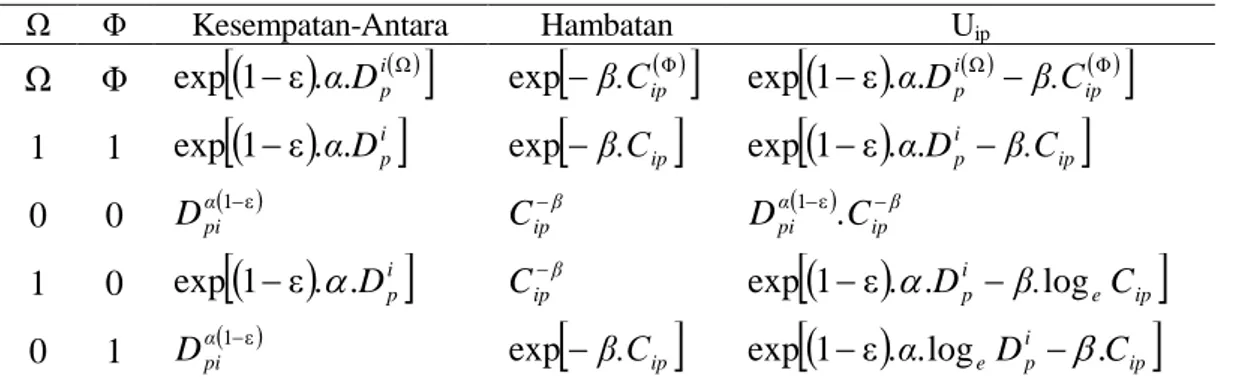
= d d i jd i j δ .D D (11)Parameter (Ω, Φ) dipilih terlebih dahulu, di luar proses kalibrasi (lihat Tabel 1). Transformasi (ε, µ) didefinisikan dengan Tabel 2.
Spesifikasi Faktor Kesempatan
Spesifikasi faktor kesempatan merupakan pernyataan dari kombinasi faktor kesempatan dan faktor hambatan. Secara umum ada empat kombinasi yang biasa dipakai dalam perhitungan model gravity-opportunity, seperti yang terlihat pada tabel berikut. Parameter yang menentukan spesifikasi adalah Ω dan Φ. Ω merupakan parameter bagi spesifikasi fungsi kesempatan sedangkan Φ parameter bagi fungsi hambatan. Nilai 0 bagi
parameter tersebut menandakan spesifikasi fungsi tersebut adalah jenis pangkat, sedangkan jika nilainya satu merupakan jenis eksponensial.
Tabel 1 Spesifikasi Fungsi Kesempatan
Ω Φ Kesempatan-Antara Hambatan Uip Ω Φ
[
(
)
( )Ω]
. ε 1 exp − .αDip ( )[
Φ]
exp−β.Cip(
)
( ) ( )[
Ω Φ]
. ε 1 exp ip i p β.C D .α − − 1 1 exp[
(
1−ε)
.α.Dip]
exp[
−β.Cip]
[
(
)
ip]
i p β.C D .α − −ε . 1 exp 0 0 Dαpi( )1−ε β ip C− ( ) ipβ α pi .C D 1−ε − 1 0 exp[
(
1−ε)
.α.Dip]
β ip C−[
(
)
e ip]
i p β. C D . . log ε 1 exp − α − 0 1 Dαpi( )1−ε exp[
−β.Cip]
[
(
)
ip]
i p eD C .α.log . ε 1 exp − −βSumber : Wills (1986) seperti ditulis dalam Tamin (2000)
Tabel 2 Spesifikasi Faktor Proporsi
Bentuk µ ε Cummulative Opportunities (Xij) Faktor Proporsi (Fij) GO 0≤ µ ≤1 0 ≤ ε ≤ 1 ( )ε,μ
∑
j p ip U ( )ε,μ 1 ( )ε,μ − ∑
∑
j− p ip j p ip U U LO 1 0 ∑
j p ip e U log − ∑
∑
log −1 log j p ip e j p ip e U U DO 1 0≤ ε ≤ 1 ( )ε ∑
j p ip U ( )ε 1 ( )ε − ∑
∑
j− p ip j p ip U U GR 0≤ µ ≤1 1 ∑
j p ip U Uip IO 0 0≤ ε ≤1 1/ε ∑
j p ip U 1/ε 1 1/ε − ∑
∑
j− p ip j p ip U U EO 0 0 ∑
j p ip U exp − ∑
∑
exp −1 exp j p ip j p ip U U BO 0≤ µ ≤1 0 ∑
j p ip e U log μ(
)
− +∑
j p ip U exp μ 1 + − ∑
∑
log −1 log μ j p ip e j p ip e U U(
)
− −μ exp∑
exp∑
−1 1 j p ip j p ip U UStruktur Faktor Proporsi
Sebagaimana sebuah fungsi kontinyu pernyataan sebuah peluang selalu dinyatakan dari selisih dua buah peluang kumulatif. Dalam perhitungan model gravity-opportunity, struktur fungsi kesempatan dinyatakan sebagai kombinasi dari ε dan µ. Dari kombinasi dua parameter tersebut secara garis besar dapat dikelompokkan 6 struktur fungsi yaitu:
Logaritmic-Opportunity (LO), Direct-Opportunity (DO), Gravity (GR), Inverse-Opportunity
(IO), Exponential-Opportunity (EO) dan Blended-Opportunity (BO). Pengaruh Metode Estimasi
Metode Estimasi Kuadrat-Terkecil (KT)
Metode estimasi ini mencoba mengkalibrasi parameter model transportasi yang tidak diketahui sehingga meminimumkan jumlah perbedaan kuadrat antara arus lalulintas hasil estimasi dan hasil pengamatan.
Secara matematis, masalah kalibrasi dari metode penaksiran kuadrat-terkecil dapat dinyatakan sebagai berikut dengan Vl = 1 untuk KT atau Vl = Vˆ untuk Kuadrat-Terkecil-l
Berbobot (KTB): Minimum
∑
(
)
= − = L l l l l V V V S 1 2 ˆ (12) dimana :Vl = jumlah arus di ruas hasil estimasi l
Vˆ = jumlah arus di ruas hasil pengamatan
Metode Estimasi Kemungkinan-Maksimum (KM)
Tamin (1988, 1999) juga sudah membangun metode estimasi yang mecoba untuk memaksimumkan kemungkinan yang tercantum pada persamaan di bawah. Kerangka kerja dari metode estimasi KM adalah berupa pemilihan hipotesis H yang memaksimumkan persamaan di bawah dengan batasan tertentu, yang nantinya menghasilkan sebaran Vl yang paling sesuai dengan data hasil survey (Vˆ ). Fungsi obyektif dari kerangka kerja ini adalah: l
Memaksimumkan : =
∏
l V l l p c L . ˆ (13) Dengan batasan:∑
− ˆ =0 l T l V V (14) dengan: TVˆ = arus total lalu lintas hasil pengamatan c = konstanta, dimana T l l V V p ˆ = Metode Estimasi Inferensi-Bayes (IB)
Tamin (1999) menyebutkan, metode ini menggunakan suatu probabilitas subyektif untuk mengukur tingkat kepercayaan tentang suatu keadaan. Pada metode ini, pertimbangan subyektif berdasarkan intuisi, pengalaman atau informasi yang tidak
langsung, secara sistematis digabungkan dengan data pengamatan untuk mendapatkan suatu taksiran yang seimbang.
Fungsi obyektif dari metode estimasi Inferensi-Bayes (IB) adalah :
Maksimumkan
( ) ∑
∑∑
= = L 1 N N log ˆ IB l i d l id id e l l lV V T .p τ (15)Metode Estimasi Entropi-Maksimum (EM)
Menurut Tamin (2000), metode estimasi entropi maksimum dikembangkan dari analogi fisika yaitu konsep tentang metode penyusunan mikro suatu sistem tertentu misalnya molekul gas. Pada model sebaran pergerakan diasumsikan bahwa pergerakan yang terjadi seperti molekul gas yang dapat bergerak bebas, sehingga menghasilkan sebaran maksimum. Dalam hal model sebaran perjalanan, pergerakan yang terjadi dapat dianggap sebagai molekul gas yang dapat bergerak bebas sehingga sebarannya maksimum atau distribusinya merata. Hal tersebut merupakan konsep dasar dari pengembangan metode estimasi entropi maksimum.
Fungsi tujuan dari model estimasi entropi maksimum adalah sebagai berikut: Memaksimumkan
∑ ∑
∑
∑∑
∑∑
= = = = = = = + − − = L 1 N 1 N 1 N 1 N 1 N 1 N 1 1 log ˆ ˆ E l i l i d l id id d l i d l id id e l id id T .p V V .p T . .p T (16)Pengaruh Metode Pemilihan Rute
Metode Pemilihan Rute All-Or-Nothing
Metode ini mengasumsikan bahwa proporsi pengendara dalam memilih rute yang diinginkan hanya tergantung pada asumsi pribadi, ciri fisik setiap ruas jalan yang akan dilaluinya, dan tidak tergantung pada tingkat kemacetan.
Model ini merupakan model pemilihan rute yang paling sederhana, yang mengasumsikan bahwa semua pengendara berusaha meminimumkan biaya perjalanannya yang tergantung pada karakteristik jaringan jalan dan asumsi pengendara. Jika semua pengendara memperkirakan biaya ini dengan cara yang sama, pastilah mereka memilih rute yang sama. Biaya ini dianggap tetap dan tidak dipengaruhi oleh efek kemacetan.
Metoda Pemilihan Rute Keseimbangan (Equilibrium Assignment)
Jika seseorang mengabaikan efek stokastik dan menganggap batasan-kapasitas sebagai salah satu mekanisme proses penyebaran pergerakan dalam suatu jaringan, dia harus mempertimbangkan beberapa set model. Sebagai contoh: model batasan-kapasitas harus menggunakan fungsi yang mengaitkan pergerakan dengan waktu tempuh. Model ini menggunakan prinsip keseimbangan Wardrop (1952).
Asumsi dasar pemodelan keseimbangan adalah, pada kondisi tidak macet, setiap pengendara akan berusaha meminimumkan biaya perjalanannya dengan beralih menggunakan rute alternatif. Bagi pengendara tersebut, biaya dari semua alternatif rute yang ada diasumsikan diketahui secara implisit dalam pemodelan. Jika tidak satupun pengendara dapat memperkecil biaya tersebut, maka sistem dikatakan telah mencapai kondisi keseimbangan.
ANALISIS DATA
Untuk mencari validasi dari setiap metode estimasi digunakan data arus lalu lintas dari Kota Bandung. Model jaringan jalan dibentuk sebagai wakil suplai jaringan jalan terdiri dari 1238 ruas (total 2279 ruas jalan per arah) yang meliputi semua jalan arteri, kolektor dan beberapa ruas jalan local penting. Model sistem zona yang mewakili sisi permintaan perjalanan terdiri dari tota 125 zona dengan perincian 100 zona internal di wilayah Kota Bandung dan 25 zona eksternal di wilayah Kabupaten Bandung, Kota Cimahi dan Kabupaten Sumedang.
Uji statistik yang dilakukan adalah tes Root Mean Square Error (RMSE maupun %RMSE), Mean Absolute Error (MAE maupun NMAE) dan koefisien determinasi (R2 dan SR2).
Pengaruh Model Sebaran Pergerakan
Model Sebaran Pergerakan Gravity (GR)
Hasil estimasi parameter model kebutuhan transportasi yang dihasilkan untuk berbagai jenis model GR adalah ditunjukkan pada Tabel 3. Proses tersebut dilakukan dengan metode estimasi Kuadrat-Terkecil-Berbobot (KTB), fungsi hambatan eksponensial-negatif dan metode pemilihan rute keseimbangan (equilibrium assignment).
Tabel 3 Hasil Estimasi Parameter Model Transportasi Menurut Jenis Model GR
No. Model Gravity Fungsi Eksponensial-Negatif β
Fungsi Tujuan
1 Batasan-bangkitan 0,117298 167710,515
2 Batasan-tarikan 0,146357 245954,062
3 Batasan-bangkitan-tarikan 0,060252 58142,598
Dari Tabel 3 dapat dilihat bahwa dari ketiga jenis model GR, model GR dengan batasan-bangkitan-tarikan menghasilkan tingkat keakurasian yang paling baik dibandingkan jenis model GR lainnya. Hal tersebut ditunjukkan berdasarkan nilai minimum dari fungsi tujuan dari metode estimasi KTB, dimana jenis batasan-bangkitan-tarikan nilainya paling kecil.
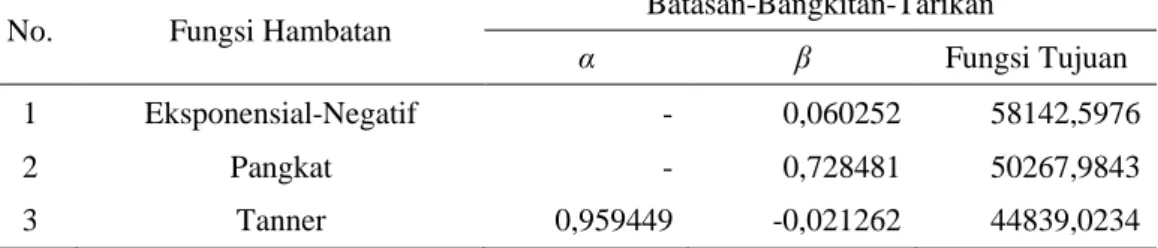
Berdasarkan hasil estimasi untuk model batasan-bangkitan-tarikan, selanjutnya dilakukan estimasi parameter menurut jenis fungsi hambatan. Hasil estimasi parameter model kebutuhan transportasi yang dihasilkan untuk berbagai jenis fungsi hambatan adalah ditunjukkan pada Tabel 4.
Tabel 4 Hasil Estimasi Parameter Model Transportasi Menurut Jenis Fungsi Hambatan
No. Fungsi Hambatan Batasan-Bangkitan-Tarikan
α β Fungsi Tujuan
1 Eksponensial-Negatif - 0,060252 58142,5976
2 Pangkat - 0,728481 50267,9843
Dari Tabel 4 dapat dilihat bahwa hasil perbandingan antara tiap jenis fungsi hambatan menunjukkan bahwa fungsi hambatanTanner memberikan tingkat kinerja yang terbaik. Hal tersebut ditunjukkan berdasarkan nilai minimum dari fungsi tujuan dari metode estimasi KTB. Setelah fungsi Tanner, urutan terbaik selanjutnya adalah fungsi pangkat. Fungsi ini kinerjanya lebih baik dibandingkan dengan fungsi eksponensial-negatif.
Jika dikombinasikan dengan jenis model GR seperti telah dibahas sebelumnya, maka kinerja terbaik ditunjukkan oleh jenis model GR batasan-bangkitan-tarikan (DCGR) dengan fungsi hambatan Tanner.
Model Sebaran Pergerakan Gravity-Opportunity (GO)
Dalam penerapan model ini, digunakan kombinasi nilai parameter Ω dan Φ sebagai berikut : Ω=1 dan Φ=1; Ω=1 dan Φ=0; Ω=0 dan Φ=1 serta Ω=0 dan Φ=0. Sedangkan parameter Box-Coxε dan μ ditetapkan di luar proses kalibrasi utama. Dengan menentukan
kombinasi dari ε dan μ, nilai fungsi tujuan dan parameter α dan β diestimasi berdasarkan nilai awal parameter α dan β.
Hasil penerapan pada data Kota Bandung menunjukkan bahwa kombinasi parameter model GO dengan nilai fungsi tujuan yang optimum untuk masing-masing metode estimasi ternyata menuju pada satu nilai kombinasi, terutama pada kombinasi parameter ε dan μ di mana ε=0,9 dan μ=0,1. Sedangkan nilai α dan β yang diperoleh relatif berdekatan. Pada akhirnya, pengujian statistik arus estimasi untuk masing-masing metodepun menghasilkan nilai yang relatif berdekatan.
Hasil estimasi parameter model kebutuhan transportasi yang dihasilkan dengan Model GO untuk berbagai jenis kombinasi fungsi kesempatan (nilai Ω dan Φ) adalah ditunjukkan pada Tabel 5. Proses tersebut dilakukan dengan metode estimasi Kuadrat-Terkecil-Berbobot (KTB) dan metode pemilihan rute keseimbangan (equilibrium
assignment).
Tabel 5 Hasil Estimasi Parameter Model Transportasi Menurut Jenis Model GO
No. Nilai Ω dan Φ α β Fungsi Tujuan
1 Ω = 1, Φ = 1 - 0,004616 0,076779 51725,2539
2 Ω = 1, Φ = 0 0,010389 0,927236 51733,5078
3 Ω = 0, Φ = 1 2,100345 0,080499 54386,3632
4 Ω = 0, Φ = 0 0,910340 0,908528 51455,0078
Dari Tabel 5dapat dilihat bahwa keempat kombinasi spesifikasi fungsi kesempatan menunjukkan tingkat kinerja relatif hampir sama antara satu dengan lainnya.
Pengaruh Metode Estimasi Parameter
Hasil estimasi parameter model kebutuhan transportasi yang dihasilkan untuk berbagai jenis metode estimasi adalah ditunjukkan pada Tabel 6. Proses tersebut dilakukan dengan model GR dengan batasan-bangkitan-tarikan, fungsi hambatan eksponensial-negatif dan metode pemilihan rute keseimbangan (equilibrium assignment). Model batasan-bangkitan-tarikan dipilih karena berdasarkan hasil simulasi pada bagian sebelumnya, menunjukkan kinerja yang terbaik jika dibandingkan dengan model batasan-bangkitan maupun batasan-tarikan.
Tabel 6 Hasil Estimasi Parameter Model Transportasi Menurut Jenis Metode Estimasi pada Kondisi Model GR Batasan-Bangkitan-Tarikan dan Pemilihan Rute Keseimbangan
No. Metode Estimasi β GR
Fungsi Tujuan 1 Kuadrat-Terkecil (KT) 0,060252 47349752,0000 2 Kuadrat-Terkecil-Berbobot (KTB) 0,068619 62175,1445 3 Kemiripan-Maksimum (KM) 0,067810 13279375,0000 4 Inferensi-Bayes (IB) 0,059928 13284560,0000 5 Entropi-Maksimum (EM) 0,063099 -24061,0330
Dari Tabel 6 dapat dilihat bahwa masing-masing metode estimasi menghasilkan parameter β yang nilainya hampir sama antara satu metode dengan metode yang lainnya. Untuk menentukan tingkat kinerja tidak bisa menggunakan parameter nilai fungsi tujuan, karena metode mencari fungsi tujuan berbeda antara satu metode dengan metode lainnya. Pengaruh Metode Pemilihan Rute
Hasil estimasi parameter model kebutuhan transportasi yang dihasilkan pada kondisi pemilihan rute keseimbangan (equilibrium assignment) dan pemilihan rute
all-or-nothing untuk berbagai jenis metode estimasi adalah ditunjukkan pada Tabel 7. Proses
tersebut dilakukan dengan model GR dengan batasan-bangkitan-tarikan, fungsi hambatan eksponensial-negatif serta metode estimasi KTB. Untuk model GO digunakan kombinasi fungsi kesempatan Ω=0 dan Φ=0, faktor proporsi ε=0,9 dan μ=0,1 serta metode estimasi KTB.
Tabel 7 Hasil Estimasi Parameter Model Transportasi Menurut Jenis Pemilihan Rute
No. Metode Pemilihan Rute GR GO β Fungsi Tujuan α β Fungsi Tujuan 1 Keseimbangan 0,068619 62175,14 0,910340 0,90853 51455,01 2 All-Or-Nothing 0,127845 144568,33 -0,004820 0,12795 130294,19
Dari Tabel 7 dapat dilihat bahwa jika dibandingkan dari nilai fungsi tujuan, maka penggunaan metode pemilihan rute keseimbangan jauh lebih baik dari pada penggunaan metode pemilihan rute all-or-nothing.
KESIMPULAN DAN REKOMENDASI
Penelitian ini bertujuan untuk meninjau tingkat keakurasian MAT yang dihasilkan dari informasi data arus lalulintas yang dipengaruhi oleh faktor-faktor:
(1) Metode Sebaran Pergerakan Gravity (GR) dan Gravity-Opportunity (GO)
(2) Metode Estimasi Kuadrat-Terkecil (KT), Kemiripan-Maksimum (KM), Inferensi-Bayes (IB) dan Entropi-Maksimum (EM)
(3) Teknik Pemilihan Rute All-Or-Nothing dan Keseimbangan (Equilibrium Assignment) Berdasarkan simulasi berbagai faktor-faktor pengaruh (model kebutuhan transportasi, metode estimasi parameter dan metode pemilihan rute) seperti telah diuraikan di atas, maka model yang menghasilkan tingkat keakurasian paling tinggi adalah metode GO yang dikombinasikan dengan metode estimasi KTB dan metode pemilihan rute keseimbangan (equilibrium assignment). Penggunaan model GO tersebut menghasilkan
tingkat keakurasian yang hanya ’sedikit’ lebih baik jika dibandingkan menggunakan model GR. Jika digunakan model GR, maka kombinasi terbaik dihasilkan dengan metode estimasi KTB yang dikombinasikan dengan model batasan-bangkitan-tarikan (DCGR) dengan fungsi hambatan perjalanan Tanner.
Jika dibandingkan antara tingkat keakurasian yang dihasilkan serta mempertimbangkan kriteria-kriteria lainnya seperti: kompleksitas perhitungan serta lamanya waktu proses menggunakan komputer, maka diusulkan untuk menggunakan model GR sebagai dasar untuk estimasi model kebutuhan transportasi. Dalam hal ini model GR yang diusulkan, dikombinasikan dengan metode estimasi KTB, dengan model batasan-bangkitan-tarikan (DCGR) dan dengan fungsi hambatan perjalanan Tanner.
DAFTAR PUSTAKA
Tamin, O.Z. 1988. The Estimation of Transport Demand Models From Traffic Counts. PhD Dissertation of the University of London, University College London.
Tamin, O.Z. and Willumsen, L.G. 1988. Transport Demand Model Estimation From Traffic Counts. Journal of Transportation, UK.
Tamin, O.Z., Sjafruddin, A. dan Hidayat, H. 1999. Dynamic Origin-Destination (O-D)
Matrices Estimation From Real Traffic Count Information. 3rd EASTS Conference
Proceeding, Taipei 15–17 September 1999, hosted by Chinese Institute of Transportation, Taipei.
Tamin, O.Z. 2000. Perencanaan dan Pemodelan Transportasi, Edisi 2, Penerbit ITB, Bandung.
Tamin, O.Z. et al. 2000. Dynamic Origin-Destination (OD) Matrices Estimation From
Real Time Traffic Count Information, Laporan Tahap I, Graduate Team Research
Grant, Batch IV, University Research for Graduate Education (URGE) project.
Tamin, O.Z. et al. 2001. Dynamic Origin-Destination (OD) Matrices Estimation From
Real Time Traffic Count Information, Laporan Akhir, Graduate Team Research
Grant, Batch IV, University Research for Graduate Education (URGE) project. Willumsen, L.G. 1981. An Entropy Maximising Model for Estimating Trip Matrices From