1
Makalah Seminar Tugas Akhir
Aplikasi Algoritma Genetik
Untuk Mengestimasi Waktu Tunda
Agung Abdul Fakih (L2F 098 578) E-mail : [email protected]
Laboratorium Teknik Kontrol Otomatik
Jurusan Teknik Elektro Fakultas Teknik Universitas Diponegoro Abstrak−−Algoritma genetik merupakan metode
optimasi berbasis pencarian global stokastik yang menyerupai proses evolusi biologi. Solusi yang didapat bersifat global, bukan local minima, karena ia memiliki daerah pencarian banyak titik (multipoint searching). Karakteristik ini sangat membantu dalam menentukan solusi optimal dari permasalahan kompleks yang ingin diatasi.
Dalam Tugas Akhir ini, Algoritma Genetik digunakan untuk mengestimasi waktu tunda (time delay estimation). Pada banyak aplikasi sering dijumpai adanya beberapa variabel yang terukur yang saling berkaitan tetapi tidak diketahui berapa besar time lag yang terjadi karena proses yang terjadi adalah berubah terhadap waktu (time varying). Sehingga, untuk dapat melakukan permodelan terhadap sistem dan juga untuk dapat memprediksi urutan waktu (time series) perlu dilakukan estimasi yang tepat terhadap time lag ini. Ekstraksi dari perbedaan antara dua sinyal yang diterima antara dua sensor yang terpisah telah banyak diterapkan pada sonar dan radar untuk mencari posisi dan kecepatan target transmitter. Kata Kunci−−Algoritma Genetik, estimasi waktu tunda.
I. PENDAHULUAN 1.1 Latar Belakang
Identifikasi sistem merupakan salah satu bidang permodelan matematis dimana representasi suatu sistem adalah berdasarkan data yang diperoleh dari eksperimen. Terdapat banyak aplikasi yang melibatkan proses ini di berbagai area. Pada kontrol dan sistem keteknikan, metode identifikasi sistem digunakan untuk mendapatkan permodelan yang tepat untuk sintesa regulator, pendesainan algoritma prediksi atau simulasi. Pada aplikasi pemrosesan sinyal (seperti yang banyak ditemui di bidang komunikasi, teknik geofisika dan teknik mesin), model yang didapatkan dari identifikasi sistem digunakan untuk analisa spektral, deteksi kesalahan (faults), pengenalan bentuk, penapisan adaptif (adaptive filtering), prediksi linear dan tujuan lainnya. Teknik identifikasi sistem juga dapat digunakan pada bidang non teknis seperti pada biologi, ilmu lingkungan dan ekonometrik untuk membangun model dari pengetahuan ilmiah yang diketahui dari obyek teridentifikasi atau untuk prediksi dan kontrol sistem[1].
Permasalahan penentuan waktu tunda (time delay
estimation/TDE) juga dapat ditemukan pada banyak
aplikasi pemrosesan sinyal seperti sonar, radar, noise
cancellation dan lain-lain. Hal ini biasanya diselesaikan
dengan mengganti permasalahan tunda dimensi satu menjadi finite impulse response (FIR). Teknik penapisan adaptif (adaptive filtering) diaplikasikan dengan baik untuk area ini dengan bergantung pada sifat unimodal dari permukaan error FIR. Algoritma genetik yang merupakan salah satu teknik optimasi mempunyai kemampuan untuk menentukan global optima pada permukaan error multimodal, yaitu penentuan waktu tunda secara langsung.
1.2 Tujuan
Tujuan yang hendak dicapai dalam penulisan tugas akhir ini adalah mendapatkan parameter waktu tunda yang optimal dengan menggunakan metode algoritma genetik.
1.3 Pembatasan Masalah
Karena kompleksnya permasalahan maka pada tugas akhir ini dilakukan pembatasan-pembatasan berikut:
1. Penalaan parameter waktu tunda menggunakan algoritma genetik sederhana (Simple Genetic Algorithm) yang diimplementasikan dengan program
bantu Matlab 6.1.
2. Metoda seleksi yang digunakan pada algoritma genetik adalah metode random (stochastic universal
sampling).
3. Metode pindah silang yang digunakan adalah pindah silang tunggal (single crossover).
4. Mutasi yang digunakan adalah flip bit.
5. Hasil estimasi ini kemudian dibandingkan dengan hasil metoda Algoritma Least Mean Square.
6. Sinyal filter adaptif FIR yang digunakan adalah langsung (transversal) berode 1.
7. Kriteria terminasi proses pada algoritma genetik yang digunakan adalah generasi maksimum yaitu sebanyak 500 iterasi.
8. Fungsi obyektif yang digunakan pada algoritma genetik adalah minimalisasi mean square error/MSE.
II. DASAR TEORI
Identifikasi sistem merupakan salah satu bidang dari sistem permodelan dinamis yang didapat dari data eksperimen[2]. Sistem dinamis secara konseptual diilustrasikan pada gambar 1. Sistem diberi masukan oleh variabel masukan
u
(t
)
dan gangguanv
(t
)
. Pengguna dapat mengontrolu
(t
)
tetapi tidakv
(t
)
. Pada beberapa aplikasi pemrosesan sinyal, masukan dapat saja tidak diketahui sehingga sinyal keluaran berguna sebagai variabel yang dapat menyediakan informasi penting tentang sistem. Untuk suatu sistem dinamis, aksi kontrol pada saat t akan mempengaruhi keluaran pada saat s t.Gambar 1. Sistem dinamis dengan masukan u(t), keluaran y(t) dan gangguan v(t)
Pengenalan sistem dapat dilakukan dengan metode
real time atau langsung terhubung ke plant secara on-line ataupun dengan cara lain, yaitu jika memiliki cukup
data masukan keluaran maka pengenalan suatu sistem dapat dilakukan lewat penganalisaan dan pembelajaran terhadap data tersebut, dimana hal ini biasa disebut dengan metode working off-line.
Identifikasi sistem didefinsikan sebagai usaha merekonstruksi model parametrik plant lewat usaha eksperimental dengan menggunakan data yang berasal dari masukan dan keluaran yang kemudian dilanjutkan dengan melakukan proses estimasi yang memberikan nilai parameter optimal yang lebih dapat menjelaskan tentang sistem yang hendak dikenali. Persyaratan umum dari pengidentifikasian suatu sistem secara on-line adalah dibatasinya waktu pengmbilan data cuplik (sample) dari plant yang hendak dipantau. Selain itu, waktu proses pengidentifikasian sistem juga tidak boleh terlalu lama karena dikhawatirkan akan terjadinya perubahan pada plant akibat perubahan lingkungan. Perubahan plant tersebut mengakibatkan perubahan parameter sehingga hasil yang didapat dari proses estimasi akan tidak valid lagi. Oleh karena itu, keberhasilan perancangan pengidentifikasi sistem yang benar-benar realistis dan mengacu pada keadaan sebenarnya sangat tergantung kepada berapa besar informasi dan pengetahuan yang dimiliki oleh perancang mengenai plant tersebut.
III. ALGORITMA GENETIK
Algoritma genetik pertama kali diperkenalkan oleh John Holland dari Universitas Michigan pada tahun 1975 dengan dipublikasikan tulisannya berjudul “Adapted in Natural and Artificial System”. Dalam tulisan tersebut dijelaskan bahwa algoritma genetik sangat cocok digunakan untuk memecahkan masalah optimasi kompleks dan juga untuk aplikasi yang membutuhkan pemecahan masalah adaptif. Sehingga dengan beberapa keunggulan tersebut, algoritma genetik diterima pada berbagai kalangan dan telah diaplikasikan pada berbagai bidang[15].
3.1 Pendekatan Algoritma Genetik
Algoritma genetik merupakan metode pencarian stokastik yang diilhami oleh proses biologi yang dapat diterapkan pada sebagian besar permasalahan. Algoritma genetik memodelkan mekanisme seleksi alam dan proses genetik untuk menuntun suatu pencarian seperti cara-cara alam dalam menyelesaikan permasalahan adaptasi organisme untuk mempertahankan kelangsungan hidupnya[14].
Algoritma genetik merupakan teknik pencarian stokastik yang diilhami oleh mekanisme evolusi dan genetik alam. Populasi dari kandidat-kandidat solusi, atau individual, dipertahankan dan berkompetisi untuk dapat bertahan hidup. Individu yang lebih kuat mempunyai kesempatan yang lebih besar untuk menghasilkan individu baru (keturunannya) daripada individu yang lebih lemah. Individu baru tersebut dihasilkan melalui rekombinasi, kemudian melalui proses mutasi akan sifat-sifat dari tiap induk akan terwarisi sehingga pilihan kandidat solusi lebih banyak. Pada tahap selanjutnya, keturunan tersebut berkompetisi juga dengan induknya. Pertambahan populasi dari induk-induk yang terbaik tersebut selanjutnya akan menghasilkan keturunan yang baik dan menghilangkan individu yang lemah.
Algoritma genetik memiliki perbedaan yang mendasar dengan metode pencarian solusi optimal berbasis model matematika kalkulus, perbedaan tersebut adalah sebagai berikut :
1. Mekanisme optimasi algoritma genetik bekerja berdasarkan kromosom, dimana setiap kromosom menyimpan informasi parameter-parameter tersebut. 2. Proses pencarian solusi optimal pada mekanisme
algoritma genetik tidak dilakukan pada satu titik pencarian, tetapi pada sekumpulan titik pencarian. 3. Algoritma genetik tidak membutuhkan prosedur-
prosedur matematis dalam mencari solusi optimal tetapi algoritma genetik menggunakan informasi langsung dari hasil transfer tiap-tiap parameternya ke suatu fungsi yang dapat mewakili tujuan dari proses optimasi yang sedang dilakukan.
u(t) y (t)
keluaran masukan sistem
4. Mekanisme genetik digunakan dalam pemrosesan kode parameter suatu permasalahan, melalui proses seleksi, rekombinasi dan mutasi untuk memperoleh solusi optimal.
5. Proses pencarian solusi optimal menggunakan metode algoritma genetik menggunakan titik acuan sembarang, untuk menghindari solusi optimal lokal. 6. Mekanisme pencarian terbimbing diberikan melalui
penilaian terhadap kualitas kode atau kromosom yang dimiliki oleh setiap individu dalam suatu generasi. 3.2 Mekanisme Algoritma Genetik
Proses algoritma genetik memiliki suatu tahapan siklus sederhana sebagai berikut :
1. Membentuk suatu populasi string awal secara acak. 2. Mengevaluasi masing-masing awal.
3. Memilih string terbaik.
4. Memanipulasi string-string tersebut secara genetik untuk menghasilkan populasi string baru.
3.3 Operator-operator Algoritma Genetik
Algoritma Genetik bekerja dengan mengevaluasi dan memanipulasi kandidat-kandidat solusi, berupa string-string individu, dengan menggunakan operasi-operasi genetik. Operator genetik berperan terhadap setiap string individu dalam populasi sehingga dihasilkan individu baru yang lebih baik untuk generasi selanjutnya. Operator dasar yang sering digunakan adalah reproduksi, pindah silang (crossover) dan mutasi serta reinsersi
3.3.1. Reproduksi (Seleksi)
Reproduksi adalah proses penyalinan string individu sesuai dengan nilai fitnessnya. Setiap individu dalam populasi dalam satu generasi akan diseleksi berdasarkan nilai fitnessnya. Probabilitas terpilihnya satu individu untuk bereproduksi adalah sebesar nilai fitness individu tersebut dibagi dengan jumlah nilai fitness seluruh individu dalam populasi. Banyak salinan satu individu sebanding dengan nilai fitness individu tersebut, sehingga, individu dengan nilai fitness lebih besar akan diproduksi lebih banyak.
3.3.2. Pindah Silang (Crossover)
Pindah silang bertujuan menambah keanekaragaman individu dalam populasi dengan mengawinkan individu-individu dalam populasi (Pt) sehingga menghasilkan keturunan berupa individu-individu baru (offspring) untuk ditempatkan dalam populasi (Pt+1). Individu baru akan memiliki bagian dari struktur kedua induknya.
3.3.3. Mutasi
Reproduksi dan pindah silang menghasilkan keanekaragaman individu baru tetapi dapat mengkibatkan terjadinya penghapusan materi dalam struktur tertentu dan tidak ada cara untuk
mengembalikan materi yang hilang. Melalui mutasi, individu baru dapat diciptakan dengan melakukan modifikasi terhadap satu atau lebih gen pada individu yang sama. Mutasi memastikan bahwa probabilitas untuk pencarian dalam sembarang wilayah dalam ruang persoalan tidak akan pernah nol dan mencegah hilangnya materi genetik setelah reproduksi dan pindah silang.
3.3.4 Reinsersi
Reinsersi dapat didefinisikan sebagai proses untuk menjaga ukuran dari populasi asli, baik pada saat populasi kekurangan maupun kelebihan individu. Proses ini juga dapat didefinisikan sebagai skema yang digunakan untuk untuk menetukan individu yang pantas dipertahankan dalam populasi yang baru.
Proses seleksi dan rekombinasi menghasilkan populasi individu baru dan memiliki nilai fitness. Jika populasi individu yang dihasilkan lewat rekombinasi lebih sedikit dibanding dengan ukuran populasi sebenarnya maka beda jumlah populasi tersebut di sebagai celah generasi (generation gap). Jika satu individu yang lebih atau paling baik (lebih fit) pada generasi sebelumnya maka ia dapat disisipkan pada generasi berikutnya. Hal ini disebut sebagai strategi elitist, dimana anggota dengan nilai fitness yang rendah digantikan dengan individu yang lebih baik.
IV. PENERAPAN ALGORITMA GENETIK UNTUK MENGESTIMASI WAKTU TUNDA
Algoritma genetik yang digunakan dalam tugas akhir ini adalah Simple Genetic Algorithms (SGA). Penggunaan SGA didasarkan atas hal-hal berikut : 1. Tidak memerlukan sistem komputer yang besar untuk
melakukan proses komputasi.
2. Sistematika operator genetik yang digunakan cukup baik.
3. Kestabilan kualitas individu dalam suatu generasi dapat terjaga dengan baik lewat seleksi elit yang terjadi.
4. Tidak ada penumpukan (overlapping) pada populasi string, reproduksi, crossover dan mutasi.
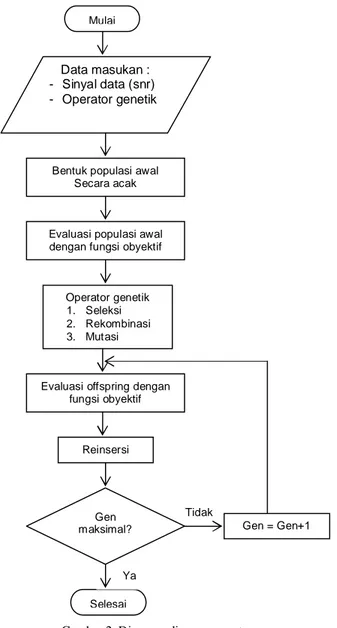
5. Adaptasi pay-off (fungsi obyektif) yang sederhana. Diagram alir algoritma genetik ini diperlihatkan pada Gambar 2.
Gambar 2 .Diagram alir program utama
4.1 Teknik Pengkodean Parameter Optimasi
Implementasi permasalahan untuk solusi sistem dengan menggunakan algoritma genetik dimulai dengan teknik pengkodean parameter (encoding) . Dalam penalaan parameter sistem estimasi waktu tunda, pengkodean dilakukan terhadap koefisien filter serta konstanta tunda. Untuk aplikasi ini setiap parameter dikode dengan kepresisian 16 bit untuk tiap individunya. Sehingga, untuk sistem tak nerubah terhadap waktu dengan filter adaptif FIR orde 1 misalnya, dimana yang dikode adalah konstanta tunda dan konstanta filter adaptif yaitu b0 dan b1 maka panjang setiap kromosom adalah 48 bit. Susunan bit pembentuk kromosom, dalam format binary gray, ini ditunjukkan Gambar 3.
16 ... 16 16 ... 16 16 ... 16
48 33 32 17 16 1 konstanta b1 konstanta b0 konstanta tunda
Gambar 3. Skema pengkodean
4.2 Pembentukan Fungsi Objektif & Fungsi Fitness Pada algoritma genetik untuk dapat mengetahui kualitas individu yang dihasilkan, diperlukan suatu fungsi matematis yang dapat mengevaluasi setiap individu yang terbentuk dalam satu generasi. Fungsi matematis ini, kemudian disebut dengan fungsi obyektif, sangatlah menentukan performansi algoritma genetik karena menghubungkan algoritma genetik dengan sistem yang akan dioptimasi.
Fungsi obyektif yang digunakan pada aplikasi ini adalah mean square error (MSE). MSE yang didefinisikan dengan E
yyˆ
2
, merupakan salah satu kriteria yang dapat digunakan untuk menilai performa dari sebuah estimator atau prediktory
ˆ
terhadap variabel acak y. pemilihan kriteria MSE ini adalah, error yang bernilai kecil relatif dapat diabaikan dan semua error besar dihargai sama (dengan ekpektasi). Kemudian proses pengkuadratan akan menjadikan error bernilai besar diperbesar lagi sehingga memiliki pengaruh yang lebih signifikan. Proses pembentukan fungsi objektif dapat dijabarkan sebagai berikut :
1. Menentukan bentuk dan jenis sinyal data yaitu x(n) dan y(n).
2. Mencari bentuk estimasi sinyal terima x’(n) berdasarkan rekondisi sinyal terima yang diproses dengan difilter seseuai dengan orde filter yang dipilih dan diberi tunda sesuai yang diestimasikan sebelumnya dimana konstanta filter dan tunda berasal dari fenotif yang berasal dari kromosom yang berisi gen-gen parameter sistem.
3. Memasukkan nilai x’(n) dan y’(n) ke dalam fungsi MSE dimana harga error yang dihasilkan merupakan nilai fungsi obyektif yang akan digunakan.
k n x n y MSE k n
1 2 )] ( ' ) ( ' [4.2 Data Algoritma Genetik
Data yang dibutuhkan untuk proses komputasi algoritma genetik dapat dikelompokkan menjadi 3 bagian, yaitu parameter genetik, data teknis dan data keluaran.
4.2.1 Parameter Genetik
Parameter genetik yang ditentukan di sini merupakan nilai parameter yang menjadi acuan untuk simulasi dan pengujian. Parameter tersebut meliputi : 1. Jumlah generasi (MaxGen)
Generasi maksimum yang digunakan adalah sebesar 500. Besarnya nilai generasi maksimum ini karena penerapan sistem simulasi secara online dimana diharapkan dengan nilai parameter tersebut solusi sistem sudah dapat dicapai secara optimal.
2. Individu tiap populasi (Nind)
Populasi digolongkan menjadi dua jenis[13] yaitu populasi kecil sebanyak 30 individu perpopulasi dan Tidak
Selesai Ya Bentuk populasi awal
Secara acak
Evaluasi populasi awal dengan fungsi obyektif
Operator genetik 1. Seleksi 2. Rekombinasi 3. Mutasi
Gen
maksimal? Gen = Gen+1
Mulai
Evaluasi offspring dengan fungsi obyektif
Reinsersi Data masukan : - Sinyal data (snr) - Operator genetik
populasi besar sebanyak 100 individu perpopulasi. Tetapi dalam setiap aplikasi penentuan parameter adalah unik tergantung karakteristik dari proses yang berlangsung. Karena algoritma genetik dalam aplikasi ini digunakan untuk menentukan suatu nilai konstanta dari suatu data masukan yang dapat berkualitas saja berkualitas sangat buruk maka digunakan Nind sebesar 500 agar basis data yang tersedia lebih banyak sehingga proses memiliki tingkat kepresisian yang paling maksimal.
3. Probabilitas pindah silang (Pc)
Besarnya probabilitas pindah silang yang digunakan untuk aplikasi ini adalah sebesar 0.8[13].
4. Probabilitas mutasi (Pm)
Besarnya probabilitas mutasi yang digunakan untuk aplikasi ini adalah sebesar 0.01[13].
5. Celah generasi (GGAP)
Celah generasi yang digunakan adalah sebesar 0.9[14], yang menandakan bahwa offspring yang dihasilkan melalui operator genetik sebesar 0.9 x populasi. Bila populasi yang digunakan adalah 500, maka offspring yang dihasilkan adalah 450 individu dengan skema penggantian yang digunakan adalah seleksi elit. 6. Jumlah variabel dalam kromosom (NVar)
Penentuan jumlah variabel dalam kromosom mempengaruhi bentuk kromosom serta tujuan akhir dari proses algoritma genetik. Besarnya Nvar yang digunakan untuk aplikasi ini adalah sebesar 3 sampai dengan 10 tergantung kepada tipe sistem estimasi yang dikehendaki dan jenis orde filter yang dipilih. 7. Kepresisian bit (PRECI)
Besarnya nilai PRECI menunjukkan jumlah bit yang digunakan untuk merepresentasikan nilai riil dari gen-gen penyusun kromosom. Jumlah bit ini sangat mempengaruhi kinerja proses dimana semakin besar nilai PRECI maka hasil yang didapat semakin baik dan memiliki hasil yang lebih presisi tetapi juga berpengaruh pada lamanya proses komputasi. Nilai PRECI yang digunakan dalam aplikasi ini adalah sebesar 16 bit untuk tiap individu.
4.2.2 Data Teknis
Untuk menghasilkan estimasi sinyal terima digunakan filter adaptif FIR. Data teknis yang digunakan untuk filter adaptif FIR dalam aplikasinya di algoritma genetik membutuhkan keadaan sinyal data (snr) dan waktu tunda yang diaplikasikan. Kedua parameter tersebut yang akan membentuk sinyal masukan dan sinyal terima.
fs = 1;
K = 25; % signal generation L = 21; % processed samples
delay = 3; % delay after the unknown system s = randn(1,K);
xn = awgn(s,snr);
vr = xn(1:L); % delayed noisy signal and
vt = s(delay:delay+L-1); % undelayed signal
3.1.4.3 Data Keluaran
Data keluaran yang dihasilkan dari proses algoritma untuk aplikasi ini terdiri dari dua jenis yaitu data dalam bentuk grafik dan data dalam bentuk angka atau nilai. Data dalam bentuk grafik berisi informasi sebagai berikut :
1. Grafik MSE dari proses yang terjadi dimana sumbu x menyatakan generasi maksimum yang terjadi dalam proses sedangkan sumbu y menyatakan informasi nilai MSE yang dihasilkan dalam setiap generasinya. 2. Grafik konstanta waktu tunda yang terjadi dalam
proses estimasi pada aplikasi ini dimana sumbu x menyatakan generasi maksimum yang terjadi dalam proses sedangkan sumbu y menyatakan besarnya konstanta waktu tunda yang dibangkitkan dalam proses.
Sedangkan data keluaran yang dihasilkan dari proses komputasi berisi informasi mengenai nilai parameter konstanta waktu tunda dan parameter filter adaptif serta nilai MMSE (minimum mean squarre error) yang berhasil didapatkan.
V. ANALISIS DAN PEMBAHASAN
Untuk dapat mengetahui keefektifan metode yang digunakan dalam aplikasinya yaitu untuk sistem estimasi waktu tunda maka dilakukan pengujian sehingga dapat ditarik suatu kesimpulan seberapa besar keandalan metode yang diuji dibanding metode lainnya dalam jenis aplikasi yang sama yaitu estimasi waktu tunda. Metode algoritma genetik dibandingkan dengan metode algoritma LMS terhadap suatu keadaan sinyal (signal operating environment) yang sama.
Pengujian dilakukan dalam dua kondisi, yaitu pada kondisi SOE rendah derau (snr = 100 dB) dan pada keadaan SOE penuh derau (snr = 0 dB). Hal ini dimaksudkan untuk mengetahui seberapa baik performa sistem dalam dua keadaan sinyal tersebut dan untuk mengetahui pengaruh keadaan sinyal yang berbeda terhadap hasil akhir metode.
5.1 Pengujian Algoritma Genetik
Pengamatan dilakukan atas dua sinyal putih (white
signal) yang merupakan sinyal kirim dan sinyal terima.
Baik sinyal terima maupun sinyal kirim telah terkorupsi derau yang didapat dari lingkungan sinyal itu sendiri maupun dari proses pemancaran dimana derau yang terjadi tidak berkorelasi satu sama lain. Sehingga, dapat disimpulkan bahwa sinyal terima merupakan versi sinyal kirim yang telah terdistorsi derau dan mengalami tunda sebesar 3 detik. Besarnya kualitas sinyal terhadap derau (snr) tergantung dari SOE yang digunakan. Dalam aplikasi ini digunakan 2 macam keadaan yaitu keadaan SOE penuh derau (snr = 0 dB) dan keadaan SOE rendah derau/noiseless (snr = 100 dB). Sinyal yang digunakan selalu berubah-ubah secara random dalam setiap iterasinya agar mendekati keadaan nyata
dimana aplikasi bertujuan untuk menentukan permasalahan estimasi waktu tunda yang kompleks. 5.1.1 Pengujian pada Kondisi SOE Rendah Derau (SNR = 100 dB)
Pengujian dilakukan dengan menggunakan sinyal data yang memiliki kondisi sinyal snr sebesar 100 dB.
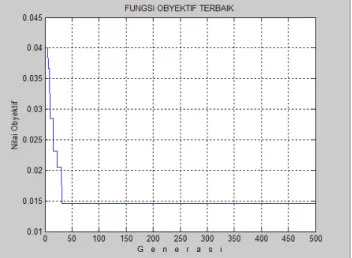
Gambar 4. Performansi algoritma genetik pada snr = 100 dB
Pada pengujian ini, terlihat perubahan fungsi obyektif pada generasi ke-1 sampai dengan ke-5 nilai obyektif menunjukkan nilai 0,0400 kemudian nilai obyektif menjadi 0,0367 pada generasi ke-6 sampai dengan generasi ke-7. Pencarian kemudian terus berlanjut sehingga didapatkan nilai obyektif yang semakin kecil karena tujuan optimasi yang dilakukan adalah meminimalkan fungsi obyektif. Secara keseluruhan, terjadi 6 kali perubahan nilai obyektif sampai dengan didapatkan solusi maksimal yang bernilai konstan yaitu pada generasi ke-32 sebesar 0,0145. Terlihat pada Gambar 4 bahwa pada algoritma genetik memiliki proses seleksi elit dimana ia akan mempertahankan nilai obyektif pada suatu generasi untuk sama atau lebih baik dengan generasi sebelumnya.
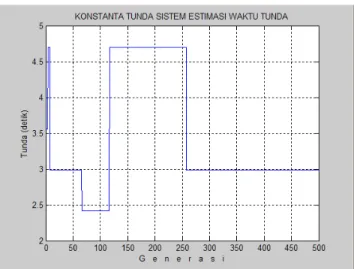
Gambar 5. Konstanta tunda dgn algoritma genetik pd snr 100 dB
Perubahan nilai kostanta tunda dan koefisien filter adaptif hampir sejalan dengan nilai obyektif karena kedua proses berjalan hampir secara bersamaan. Perubahan nilai konstanta tunda secara keseluruhan terjadi sebanyak 9 kali. Pada saat inisialisasi, nilai menunjukkan 2,9857 detik yang sama dengan nilai solusi maksimal pada saat iterasi terakhir tetapi karena didapat nilai obyektif yang lebih kecil maka generasi ke-6 nilainya berubah menjadi 0,7000. perubahan terus terjadi sampai dengan didapat solusi maksimal sebesar 2,9857 detik pada generasi ke 33. Gambar 5 ini juga memperlihatkan proses seleksi elit yang terjadi. Solusi maksimal ini terjadi ini pada saat konstanta filter adaptif b0 dan b1 bernilai – 0,71429 dan 0,57143. 5.1.2 Pengujian pada Kondisi Penuh Derau (SNR = 0 dB)
Pengujian selanjutnya dilakukan dengan menggunakan sinyal data yang memiliki kondisi sinyal snr sebesar 0 dB sehingga. Estimasi yang dilakukan menggunakan operator-operator genetik yang bernilai sama seperti pada pengujian sebelumnya (snr = 0 dB) sehingga hasil estimasi benar-benar merefleksikan performa sistem terhadap kondisi sinyal yang berbeda.
Gambar 6. Performansi algoritma genetik pada snr = 0 dB
Pada saat generasi awal nilai obyektif sebesar 0,0686 keadaan tak berlangsung lama karena saat generasi ke-4 nilai sudah berubah menjadi 0,0586. Pencarian berlanjut dan secara bertahap dan turun sehingga menghasilkan nilai obyektif yang lebih kecil. Pada generasi ke-8 nilai obyektif sampai dengan generasi ke-65 nilai obyektif sebesar 0,0398. Solusi maksimal didapat pada generasi ke 407 yaitu sebesar 0,0194, hal ini tampak dari nilai obyekti yang konstan dalam interval 407-500. Gambar 6 memperlihatkan dengan jelas solusi elit yang terjadi, dimana nilai obyektif sebesar 0,0194 ini terus dipertahankan sampai dengan generasi maksimum yaitu sebesar 500.
Gambar 7. Konstanta tunda dengan algoritma genetik pada snr 0 dB
Generasi awal menunjukkan nilai konstanta tunda sebesar 3,5571 detik yang kemudian berubah menjadi 4,7 pada saat generasi ke-4. Generasi ke-8 nilainya sama dengan nilai yang didapat dari iterasi terakhir yaitu sebesar 2,9857 detik. Akan tetapi karena didapat nilai obyektif yang lebih kecil maka nilai ini berubah menjadi 2,4143 detik. Pencarian terus berlanjut sampai dengan solusi maksimal didapat yaitu sebesar 2,9857 detik pada saat generasi mencapai 258. Seleksi elit yang terjadi terus mempertahankan nilai ini karena ia memiliki nilai obyektif yang terjadi. Parameter filter adaptif b0 dan b1 yang didapat adalah sebesar -0,71429 dan 1,7143.
5.2 Pengaruh Keadaan Sinyal terhadap Performasi Sistem
Dari Gambar 4 dan Gambar 5 yang merepresentasikan performa sistem pada keadaan snr = 100 dB serta dari Gambar 6 dan Gambar 7 yang merupakan representasi dari keadaan snr =0 B, diperlihatkan pengaruh kondisi sinyal pada faktor kekonvergenan sistem. Pada snr 0 dB dimana variasi sinyal sangat banyak maka terdapat lebih banyak perubahan parameter yang didapat untuk mendapatkan solusi maksimalnya. Sedangkan pada snr 100 dB dimana keadaan sinyal relatif baik dengan lebih sedikit noise sehingga variasi, degradasi dari kualitas sinyal lebih minimal, sistem mampu mencapai solusi maksimalnya lebih cepat dan perubahan parameter yang lebih sedikit. Semakin tinggi nilai snr yang ada, maka kualitas sinyal semakin baik dan performansi dari sistem estimasi waktu tunda semakin andal. Dengan kata lain, algoritma genetik menemukan solusi maksimalnya lebih cepat atau lebih cepat konvergen bila SOE memiliki snr yang lebih tinggi.. Pada keadaan SOE snr = 100 dB, solusi maksimal konstanta tunda ditemukan pada saat generasi sebanyak 33 sedangkan pada keadaan SOE snr = 0 dB, solusi maksimal dicapai pada saat generasi mencapai 258.
5.3 Pengujian Metode Pembanding Algoritma Least Mean Square
Proses estimasi yang dilakukan dengan menggunakan algoritma genetik kemudian dibandingkan dengan algoritma LMS. Algoritma LMS ini memiliki karakteristik yang berbeda dengan algoritma genetik dimana solusi yang didapat berupa solusi minima. Selain itu, hasil yang didapat dari metode ini adalah instantaneous maksudnya nilai tersebut benar-benar berasal dari proses iterasi yang baru saja dilakukan tanpa melibatkan memori. Oleh karena itu, nilai tunda yang dibahas merupakan nilai mean dari algoritna LMS dengan iterasi sebanyak proses algoritma genetik dalam menemukan solusi maksimalnya dalam kondisi sinyal yang sama.
5.3.1 Pengujian pada Kondisi Rendah Derau (SNR = 100 dB)
Pengujian dilakukan dengan menggunakan sinyal data dengan snr = 100 dB. Karena karakteristik algoritma LMS yang bersifat instantaneous maksudnya solusi yang didapat benar-benar berasal dari proses iterasi yang baru saja dilakukan tanpa melibatkan memori. Sehingga, hasil dari proses iterasi masing-masing berdiri sendiri tanpa ada ketergantungan satu sama lain. Untuk pengujian LMS dengan snr = 100 dB digunakan iterasi sebanyak 33 kali karena algoritma genetik telah mampu menemukan solusi maksimalnya pada saat generasi maksimalnya mencapai angka 33.
Gambar 8. Konstanta tunda dengan algoritma LMS pada snr 100 dB
Gambar 8 memperlihatkan aplikasi algoritma least mean square dalam mengestimasi waktu tunda. Algoritma ini lebih sederhana dibanding algoritma genetik sehingga mempunyai kecepatan yang lebih tinggi. Tampak dari gambar bahwa metode ini bersifat
local minima sehingga hasinya sangat berosilasi tidak
stabil dan sulit untuk menentukan secara pasti nilai yang didapat karena rentang yang satu dengan yang berikutnya kadang nilainya terpaut cukup jauh. Nilai akhir yang didapat adalah sebesar 3,4796 detik
sedangkan nilai mean yang didapat dari pross iterasi sebanyak 33 kali adalah sebesar 1,7586 detik.
5.3.2 Pengujian pada Kondisi Penuh Derau (SNR = 0 dB)
Pengujian dilakukan dengan menggunakan sinyal data yang memiliki karakteristik snr = 0 dB. Iterasi yang dilakukan adalah sebanyak 258 kali karena algoritma genetik dengan kondisi sinyal yang sama telah mampu menemukan solusi maksimalnya pada saat generasi telah mencapai angka tersebut.
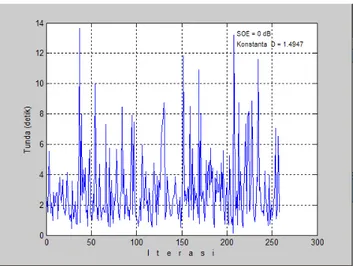
Gambar 9. Konstanta tunda dengan algoritma LMS pada snr 0 dB
Gambar 9 menampilkan performansi algoritma LMS dengan sinyal data yang memiliki karakteristik snr = 0 dB. Nilai akhir yang didapat adalah sebesar 1,4947 detik sedangkan nilai mean sebesar 2,9567 detik. Algoritma LMS memberikan performa yang lebih baik pada keadaan snr = 100 dB, ini dimungkinkan karena variasi sinyal dan jumlah iterasi yang lebih banyak sehingga memberikan basis data yang lebih baik untuk menghitung mean dari proses yang terjadi.
VI. PENUTUP 6.1 Kesimpulan
Dari hasil pengujian dan analisa yang dilakukan maka dapat ditarik kesimpulan sebagai berikut :
1. Pada snr = 100 dB dengan iterasi yang sama metode algoritma genetik memberikan nilai waktu tunda dengan persentase kesalahan 0,48 % dengan konstanta filter adaptif b0 = - 0,71429 dan b1 = 0,57143 sedangkan algoritma LMS memberikan nilai waktu tunda dengan persentase kesalahan 41,38 % dengan iterasi sebanyak 33 kali. Persentase kesalahan algoritma genetik pada sinyal dengan snr = 0 dB adalah 0,48 % dengan konstanta filter adaptif b0 = - 0,71429 dan b1 = 1,7143 sedangkan algoritma LMS 1,44 % dengan iterasi sebanyak 258 kali.
2. Algoritma genetik telah mencapai solusi maksimal pada saat generasi mencapai 33 untuk kondisi sinyal
dengan snr = 100 dB, sedangkan untuk kondisi sinyal dengan snr = 0 dB, solusi maksimal dicapai pada saat generasi telah mencapai 258.
6.2 Saran
1. Penentuan operator genetik sangat mempengaruhi kinerja dari metode ini sehingga perluan mengikuti aturan-aturan yang ada.
2. Sinyal masukan yang digunakan dapat berupa sinyal-sinyal lain yang lebih reliable dengan kondisi nyata. 3. Penelitian ini bersifat off-line sehingga dapat
dikembangkan untuk sistem on-line dengan sinyal masukan yang benar-benar terhubung ke plant.
DAFTAR PUSTAKA
1. Alkin, Oktay, Digital Signal Processing : A
Laboratory Approach Using PC-DSP,
Prentice-Hall International Inc., New Jersey, 1994.
2. Ang, Wee-Peng, B. Farhang-Boroujeny, A New
Class of Gradient Adaptive Step-Size LMS
Algorithms, IEEE Transaction on Signal
Processing, Vol. 49, no. 4, hal. 805 -810, April 2001.
3. Chipperfield, A. J., Fleming, P. J., The Matlab
Genetic Algorithm Toolbox, IEEE Colloquium on
Applied Control Techniques Using
Matlab,Diggest no. 1995/014, 26 Januari 1995.
4. Chipperfield, Andrew, Fleming, Peter, Pohlheim, Hartmut, Fonseca, Carlos, Genetic Algorithm
Tools for Control Systems Engineering, University
of Sheffield.
5. Davis, Lawrence, Handbook of Genetic Algorithms, Van Nostrand Reinhold, New York,
1991.
6. Dawid, Herbert, Adaptive Learning by Genetic
Algorithms : Analytical Results and Applications to Economic Models, 2nd Edition,
Springer-Verlag, New York, 1999.
7. DeFatta, David J., Lucas, Joseph G.,Hodgkiss, William S., Digital Signal Processing : A System
Design Approach, John Wiley & Sons, New York,
1988
8. Goldberg, David E., Genetic Algorithms in Search,
Optimization and Machine Learning, Addison-Wesley Publishing Company Inc., New York,
1989.
9. Hanselman, Duane, Littlefield, Bruce, Mastering Matlab 5 : A Comprehensive Tutorial and
Reference, Prentice-Hall Inc., New Jersey, 1998.
10. Hanselman, Duane, Littlefield, Bruce, Matlab :
Bahasa Komputasi Teknis, Penerbit Andi,
Yogyakarta, 2000.
11. Hayes, M.H., Statistical Digital Signal Processing
and Modeling, New York: John Wiley & Sons, Inc,
1996
12. Ifeachor, Emmanuel C., Jervis, Barrie W, Digital
Signal Processing : A Practical Approach,
Addison-Wesley Publishers Ltd, 1993.
13. Kuc, Roman, Introduction to Digital Signal
Processing, McGraw-Hill Book Company, New
York.
14. Ljung, Lennart, System Identification: Theory for
the User, Prentice-Hall Inc., New Jersey, 1987.
15. Man, Kim F., Tang, Kit. S., Kwong, Sam, Halang, Wolfgang A., Genetic Algorithms for Control and
Signal Processing : Advances in Industrial Control, Springer-Verlag Ltd, London, 1997.
16. Manolakis, Dinitri G., Ingle, Vinay K., Kogon, Stephen M., Statistical and Adaptive Signal
Processing : Spectral Estimaton, Signal
Modelling, Adaptive Filtering and Array
Processing, McGraw-Hill Book Co, Singapore,
2000.
17. Mix, Dwight F., Random Signal Processing, Prentice-Hall Inc., New Jersey, 1995.
18. Nascimento, Vitor H., Sayed, Alih H., On the
Learning Mechanism of the Adaptive Filters,
IEEE Transaction on Signal Processing, Vol. 48, no. 6, hal. 1609 – 1625, Juni 2000.
19. Peebles Jr., Peyton Z,, Probability, Random
Variables and Random Signal Principles, 3rd
Edition, McGraw-Hill Inc., New Jersey, 1993. 20. Proakis, John G., Manolakis, Dimitris G.,
Pemrosesan Sinyal Digital : Prinsip, Algoritma dan Aplikasi, PT Prenhallindo, Jakarta, 1997.
21. Rafaely, Noaz, Elliott, Stephen J., A Computationally Efficient Frequency-Domain LMS Algorithm with Constraints on the Adaptive Filter, IEEE Transaction on Signal Processing,
Vol. 48, no. 6, hal. 1649 - 1654, Juni 2000.
22. Shahian, Bahram, Hassul, Michael, Control
System Design Using Matlab, Prentice-Hall Inc.,
New Jersey, 1993.
23. Söderström, Torsten, Stoica, Petere, System
Identifcation, Prentice Hall International Ltd, UK,
1989.
24. Tjokronegoro, Hariyono A., Identifikasi Parameter
Sistem, Institut Teknologi Bandung, 1996.
25. Wirnitzer, Bernhard, Adaptive Filters : A Matlab
(Nano) Toolbox and Laboratory Exercises, Institut
für Digitale Signalverarbeitung, 1999. SEMARANG,JUNI 2004 Mengetahui, Pembimbing I Wahyudi, ST, MT NIP.132 086 662 Pembimbing II Aris Triwiyatno, ST NIP. 132 230 559 Agung Abdul Fakih, Mahasiswa Teknik Elektro Universitas Diponegoro angkatan 98 dengan konsentrasi Teknik Kontrol. Saat ini sedang menyelesaikan studi strata-1 (S1).