BAB II
LANDASAN TEORI
2.1 Karakteristik Kapal Tunda
Kapal tunda merupakan jenis kapal khusus yang digunakan untuk menarik atau mendorong kapal di pelabuhan, laut lepas atau melalui sungai. Kapal ini digunakan pula untuk menarik tongkang, kapal rusak dan peralatan lainnya dan memiliki tenaga yang besar bila dibandingkan dengan ukurannya.
Sesuai dengan daerah pelayarannya (menurut Tasrun Sjahrun) kapal tunda dapat digolongkan menjadi :
a) Kapal tunda pelayaran besar (Ocean Going Tug), merupakan salah satu jenis kapal tunda yang daerah pelayarannya di laut luar dan kapal ini biasanya digunakan sebagai penyuplai bahan bakar dari hasil kilang minyak (Anchor Handling Suplay Vessel).
b) Kapal tunda pelayaran pantai (Coastwise and Estuary Tug) merupakan jenis kapal tunda yang daerah pelayarannya hanya disekitar perairan pantai.
c) Kapal tunda pelabuhan dan pengerukan (Estuary and Harbour) merupakan salah satu jenis kapal tunda yang digunakan untuk menarik atau mendorong kapal yang ada di pelabuhan dan juga berfungsi sebagai penarik kapal keruk.
d) Kapal tunda perairan dangkal (Shallow Draught Pusher Tug) merupakan jenis kapal tunda yang memiliki sarat rendah.
e) Kapal tunda sungai dan dok (River and Dock Tug) merupakan jenis kapal tunda yang memiliki kemampuan tarik kurang dari 3 knot dan hanya menunda kapal disekitar area sungai.
Bangunan kapal tunda hampir sama dengan bangunan kapal barang. Hanya saja tidak dilengkapi dengan palka barang besar, sehingga ukurannya lebih kecil untuk tenaga penggerak yang sama. Karena kapal tunda dirancang untuk dapat melakukan bermacam pekerjaan seperti menarik, menunda, menggandeng dan menambatkan kapal – kapal dan alat apung lainnya yang mempunyai bobot yang jauh lebih besar. Begitupula dengan konstruksinya dirancang lebih kuat untuk menahan getaran, pada kapal tunda dilengkapi dengan peralatan tarik seperti towing hook, stabilizher guilding ring, towing beam, dan juga derek tambang tarik pada geladak tengah kapal.
Jenis kapal tunda yang dibahas pada karya tulis ini adalah kapal tunda pelayaran pantai (coastwise and estuary tug), jenis kapal ini hampir sama dengan kapal tunda pelayaran besar, hanya lokasi penggunaannya terbatas. Karena itu persyaratan pembangunan kapal tunda ini sama dengan kapal tunda untuk pelayaran besar.
Tenaga penggerak kapal tunda ini biasanya didasarkan pada permintaan pemilik yang umumnya bervariasi antara 300 – 1500 HP dengan kecepatan kurang dari 14 knot. Hampir semua sistem propulsinya memakai satu atau dua baling – baling dengan tenaga penggerak berupa motor diesel yang dapat dikendalikan langsung, baik untuk tenaga kecil maupun tenaga besar.
Daya dorong propeller ditentukan oleh VA, VB, AO (Luas discus
propeller), ini menunjukkan bahwa efisiensi propeller bergantung pada putaran dan diameter. Putaran propeller pada kapal tugboat tidak sama dengan jenis kapal yang lain karena memiliki diameter yang besar dengan putaran relatif lebih rendah.
Secara umum kecepatan kapal ditentukan oleh besar daya mesin dan tipe propeller, oleh karena itu pada saat perencanaan kapal baru, kecepatan kapal sudah ditentukan untuk memprediksikan sistem propulsi yang dipergunakan. Untuk mengetahui daya mesin sebuah kapal terlebih dahulu harus diketahui tahanan total kapal dan mengacu pada dimensi kapal atau bentuk badan kapal. Perubahan kecepatan akan berdampak pada perbedaan daya mesin dalam hal ini yaitu nilai Brake Horse Power (BHP) kapal tersebut.
2.2. Tahanan Kapal
Tahanan kapal pada suatu kecepatan adalah gaya fluida yang bekerja berlawanan dengan gerakan kapal tersebut. Tahanan tersebut akan sama dengan komponen gaya fluida yang bekerja sejajar dengan sumbu gerakan kapal.
Melihat bahwa kapal bergerak di bidang fluida cair yang nilai kerapatan massanya lebih besar dari udara sehingga semakin besar kecepatan dan dimensi suatu kapal maka semakin besar pula energi yang dibuang untuk menghasilkan energi berupa gelombang (wave), gelombang inilah yang kemudian bergesekan dengan lambung kapal dan arahnya melawan arah kapal sehingga menimbulkan gaya berlawanan.
Tahanan total (RT) pada kapal terdiri dari komponen – komponen bagian
kapal yang mempunyai kemungkinan menimbulkan gaya hambat atau resistance. Pada prinsipnya ada dua bagian kapal yang mengalami gaya hambat, yaitu bagian kapal yang terbenam dan area bagian kapal diatas permukaan air karena udara juga mempunyai faktor hambat pada kondisi tertentu. RT digunakan untuk
menentukan besar Efective Horse Power (EHP) yang didefinisikan sebagai daya yang diperlukan suatu kapal untuk bergerak dengan kecepatan sebesar VS dan
mampu mengatasi gaya hambat atau tahanan sebesar RT dan yang lebih penting
untuk mengetahui seberapa besar daya dari mesin utama agar kapal yang akan dibuat tidak mengalami kelebihan daya yang besar atau justru tidak bisa memenuhi kecepatan karena daya yang diprediksikan tidak bisa mengatasi besar tahanan kapal.
Perhitungan tahanan kapal ini sangatlah penting sekali dan diharapkan seakurat mungkin dalam arti tidak kurang dan tidak lebih karena mempengaruhi aspek – aspek dari segi biaya investasi, efisiensi, biaya perawatan, biaya operasional, persaingan ekonomis dan lain – lain. Oleh karena itu berbagai macam cara digunakan oleh para arsitek kapal untuk memprediksi besar daya dari suatu kapal dengan hasil seakurat mungkin dengan menentukan besar tahanan total yang bekerja pada suatu kapal.
Disisi lain kita juga harus memperhatikan satuan tahanan kapal yaitu sama dengan satuan gaya, karena dihasilkan oleh air maka disebut gaya hidrodinamika. Gaya hidrodinamika ini semata-mata disebabkan oleh gerakan relative kapal terhadap cairan:
1. Gaya-gaya yang bekerja tegak lurus terhadap permukaan badan kapal, (gaya tekanan).
2. Gaya-gaya yang bekerja menyinggung badan kapal (gaya geser).
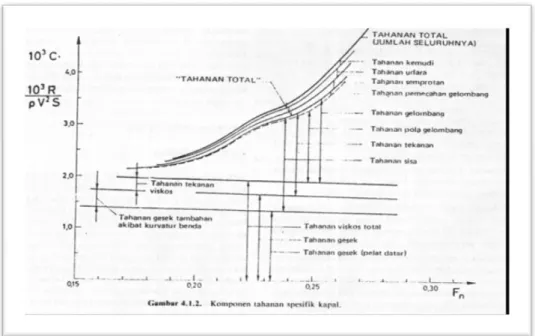
Tahanan total (RT) yang dialami kapal terdiri dari sejumlah komponen tahanan yang berbeda yang diakibatkan oleh berbagai macam penyebab dan saling berinteraksi untuk menangani masalah tahanan secara praktis, komponen tahanan ini dapat dilihat dari gambar berikut:
Gambar 2.1 Komponen Tahanan Spesifik
Sumber : Tahanan dan Propulsi Kapal. Sv. Aa. Harvald. 1982 Tahanan total (RT) yang dialami kapal terdiri dari sejumlah komponen tahanan yang berbeda yang diakibatkan oleh berbagai macam penyebab dan saling berinteraksi. Untuk menangani masalah tahanan secara praktis, maka tahanan total harus ditinjau secara praktis pula sehingga dapat diuraikan menjadi beberapa komponen utama sebagai berikut :
1. Tahanan Gesek, RF (Resistantion Friction) terjadi akibat gesekan
permukaan basah kapal dengan media yang dilaluinya, oleh karena semua fluida mempunyai nilai viskositas inilah menimbulkan gesekan tersebut. Atau komponen tahanan yang diperoleh dengan jalan mengintegralkan tegangan tangensial keseluruh permukaan basah kapal menurut arah gerakan kapal. Adapun komponen tahanan tersebut sebagai berikut (Sv. Aa.Harvald:1964):
Rf = 0, 5.Cf. .V2.S (kN) ……….…… (2.1) Dimana :
= Massa jenis air laut V = Kecepatan kapal (m/sec) S = Luas bidang basah (m2) Angka reynold (Rn)
Rn = Vs.Lwl/ υ …………...………. (2.2) Coefisien tahanan gesek (Cf)
Cf = 0,075 / (Log10Rn-2)2 ..………... (2.3)
2. Tahanan Sisa, RR (Residual Resistance) adalah kuantitas yang merupakan
hasil pengurangan dari tahanan total badan kapal, suatu tahanan gesek yang merupakan hasil perhitungan yang diperoleh dengan memakai rumus khusus. Secara umum, bagian terbesar dari tahanan sisa pada kapal niaga adalah tahanan gelombang (Wavemaking resistance). Adapun formula yang diberikan adalah sebagai berikut:
RR = (0, 5 x ρ x ∆2/3 x V2) ..……… (2.4)
Dimana:
∆ = Displacement kapal (m2) V = Kecepatan kapal (m/s)
Tahanan sisa memiliki nilai coefisien (Fn) yang diperoleh dari gambar - gambar ratio panjang dan volume yang merupakan hubungan antara angka Froude dan koefisien prismatik memanjang.
Fn= V / 𝒈. 𝑳 ……….. (2.5)
3. Tahanan Viskos, RV (Viskos Resistance) adalah komponen tahanan yang
terkait dengan energi yang dikeluarkan akibat pengaruh viskos/kekentalan. 4. Tahanan Tekanan, RP (Pressure Resistance) adalah komponen tahanan
yang diperoleh dengan jalan mengintegralkan tegangan normal keseluruh permukaan kapal menurut arah gerakan kapal.
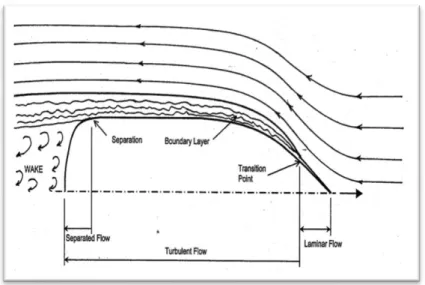
5. Tahanan Tekanan Viskos, RPV (Viskos Pressure Resistance) adalah
komponen tahanan yang diperoleh dengan jalan mengintegralkan komponen tegangan normal akibat viskositas dan turbulensi. Kuantitas ini tidak dapat diukur langsung, kecuali untuk benda yang terbenam seluruhnya, dalam hal ini sama dengan tahanan tekanan.
Gambar 2.2 Tahanan tekanan dan viskos
Sumber : Tahanan dan Propulsi. Sv. Aa. Harvald. 1982
6. Tahanan Gelombang, RW (Wavemaking Resistance) adalah komponen
tahanan yang terkait dengan energi yang dikeluarkan untuk menimbulkan gelombang gravitasi.
7. Tahanan Pola Gelombang, RWP (Wave Pattern Resistance) adalah
komponen tahanan yang disimpulkan dari hasil pengukuran elevasi gelombang yang jauh dari model kapal, dalam hal ini medan kecepatan bawah permukaan (subsurface velocity field), yang berarti momentum fluida, dianggap dapat dikaitkan dengan pola gelombang dengan memakai teori linier. Tahanan yang disimpulkan demikian itu tidak termasuk tahanan pemecahan gelombang (wave breaking resistance).
8. Tahanan Pemecahan Gelombang, RWB (Wave Breaking Resistance) adalah
komponen tahanan yang terkait dengan pemecahan gelombang yang berada di buritan kapal.
9. Tahanan Semprotan, RS (Spray Resistance) adalah komponen tahanan
yang terkait dengan energi yang dikeluarkan untuk menimbulkan semprotan.
10. Tahanan Anggota Badan (Appendage Resistance) adalah tahanan dari boss poros, penyangga poros (shaft bracket) dan poros, lunas bilga dan sebagainya. Dalam memakai model fisik, model tersebut umumnya dilengkapi dengan anggota badan seperti itu disertakan dalam pengukuran tahanan. Umumnya lunas bilga tidak dipasang. Jika tanpa anggota badan maka tahanannya disebut tahanan polos (bare resistance).
11. Tahanan Kekasaran (Roughness Resistance) adalah tahanan akibat kekasaran permukaan badan kapal misalnya akibat korosi dan fouling (pengotoran) pada badan kapal.
12. Tahanan Udara (Air Resistance) adalah tahanan yang dialami bagian atas permukaan air serta bangunan atas (superstructure) karena gerakan kapal yang menyusuri udara.
13. Tahanan Daun Kemudi (Steering Resistance) adalah tahanan akibat gerakan daun kemudi. Gerakan daun kemudi ditujukan untuk kelurusan lintasan maupun manuver kapal.
Lingkungan juga berpengaruh pada tahanan. Bila kapal bergerak diair yang terbatas, dinding pembatas air tersebut akan cukup dekat untuk mempengaruhi tahanan kapal. Terbatas disini diartikan sebagai dekatnya jarak antara dinding pembatas air itu sendiri dalam arah horizontal. Kedangkalan air
juga mempunyai pengaruh pada tahanan, yang disebut pengaruh air dangkal (Shallow Water Effect). Bila membandingkan karakterisrtik untuk kerja kapal umumnya karakteristik di daerah perairan yang mempunyai panjang, lebar dan kedalaman yang terbatas.
Selain itu, jika berada dijalur perairan samudera bebas (sea way), tahanan kapal akan mengalami perubahan yang berupa :
1. Adanya Tahanan Tambahan (Added Resistance) akibat angin yang bertiup pada bagian superstructure, RAA.
2. Tahanan menjadi lebih besar akibat gerakan kapal.
3. Adanya tahanan tambahan akibat refleksi gelombang pada badan kapal.
4. Tahanan menjadi lebih besar karena sudut hanyut ( drift angle ) yang ditimbulkan oleh baik angin dan gelombang maupun gerakan daun kemudi.
Kenaikan tahanan rata-rata digelombang, RAW, diartikan sebagai kenaikan
tahanan rata-rata diangin dan gelombang dibandingkan terhadap tahanan diair tenang pada kecepatan rata-rata yang sama. Dalam perhitungan tahanan kapal tunda digunakan Metode Yamagata.
Metode Yamagata diperkenalkan oleh seorang ilmuan Jepang bernama Dr. Yamagata. Beliau adalah salah satu staf ahli biro keselamatan dan teknologi maritim kekaisaran Jepang. Metode tahanan Yamagata banyak digunakan pada kapal – kapal yang berukuran kecil serta komponen-komponen tahanan yang diperhitungkan juga terbatas.
Adapun metode perhitungan tahanan Metode Yamagata adalah sebagai berikut :
1. Estimasi kecepatan dalam satuan knot.
2. Menentukan kecepatan kapal dalam satuan m/s.
3. Menentukan angka Reynold (Rn), dengan persamaan 2.2. Rn = Vs.Lwl / v
Dimana v = 0,884 x 10-6 m2/s. Pada suhu 28% 4. Menentukan koefisien hambatan gesek (Cf).
Cf = 0,0075 / (log 10 (Rn – 2)2
5. Menentukan nilai tahanan gesek (Rf), dengan persamaan 2.1. Rf = 0,5 . Cf . . V2 . S
6. Menentukan nilai tahanan gesek (Rf) dalam satuan kg. 7. Menentukan nilai Froude (Fn), dengan persamaan 2.5.
Fn = V / 𝑔. 𝐿
8. Menentukan nilai harga B/L -0,135 9. Menentukan nilai harga B/T -2,25
10. Menentukan harga dari (∆rR`.B/L) / (B/L-0,135) fig.5.3.2. 11. Menentukan harga dari (∆rR`.B/T) / (B/T-2,25) fig.5.3.3. 12. Menentukan harga dari (∆Rr``.B/L)
(∆Rr``.B/L) = (∆rR`.B/L) / (B/L – 0,135) fig.5.3.2 x (∆Rr``.B/L) 13. Menentukan harga dari (∆Rr``.B/T)
(∆Rr``.B/T) = B/T – 2,25 x (∆rR`.B/T) / (B/T – 2,25) 14. Menentukan koefisien tahanan sisa (rRo) fig.5.3.1.
15. Menentukan koefisien tahanan sisa (rR`) rR` = (∆Rr``.B/T) + (∆Rr``.B/L) + (rRo)
16. Menentukan hambatan sisa (RR), dengan persamaan 2.4.
RR = (0,5 x x ∆2/3 x V2)
17. Menentukan hambatan sisa (RR), dalam satuan KN
18. Menentukan hambatan total (Rx)
Rx = RR + Rf
19. Hambatan total kapal. RT = Rx + 20% . Rx
20. EHP (Effective Horse Power) EHP = RT x Vs / 75
2.3. Sistem Propulsi Kapal
Alat propulsi kapal yang paling sering digunakan adalah propeller / baling – baling yang menghasilkan daya dorong akibat adanya gaya angkat yang bekerja pada daun propeller pada saat berputar.
Tenaga yang dihasilkan oleh mesin induk ditransmisi sampai menghasilkan daya dorong pada baling-baling mengalami beberapa proses.Sehubungan dengan hal tersebut beberapa defenisi yang erat kaitannya dengan efisiensi propulsi, dipaparkan sebagai berikut (Mansyur Hasbullah: 2003):
a. BHP (Brake Horse Power) adalah tenaga yang digunakan pada saat pengereman mesin.
b. SHP (Shaft Horse Power) adalah tenaga dari poros (shaft) propeller yang diterima dari BHP.
Gambar 2.3 Fungsi SHP
Sumber : Efisiensi Propulsi. Surjo W. Adji
Gambar diatas merupakan fungsi dari SHP dapat dirumuskan sebagai berikut :
SHP = 2.π.Q.n/75 ... (2.6) Dimana :
n = Jumlah putaran poros propeller
Daya SHP yang diterima adalah lebih kecil daripada BHP, karena adanya kebocoran-kebocoran (daya yg terbuang) daya yang terjadi pada sistem poros, friction losser, bearing, thrust block, stuffing box, dan transmission gear. Kecendrungan meningkatnya kebocoran (losser Power), tergantung pada kondisi sistem poros (bearing rush) dan letak main engine ke propeller kapal. Sebagai perhitungan teoritis dapat diestimasi persentase kebocoran daya pada mesin utama, yaitu untuk kapal dengan ruang mesin utama di bagian tengah, losser power adalah 5% dan pada bagian belakang menjadi 3% saja.
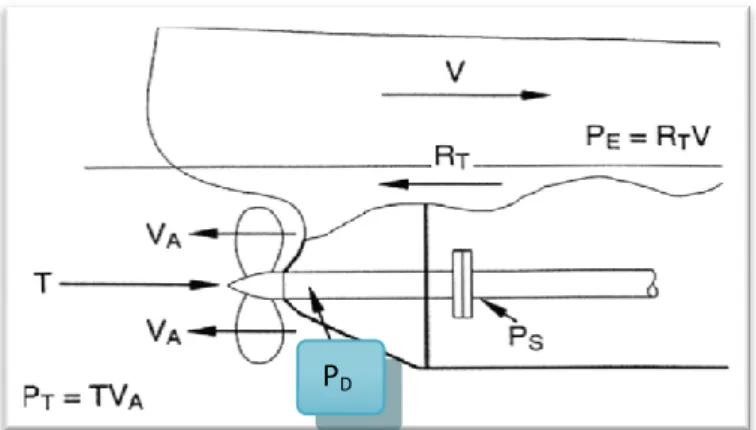
c. DHP (Delivery Horse Power) adalah tenaga yang ditransfer ke propeller.
Gambar 2.4 Fungsi DHP/PD
Sumber : Efisiensi Propulsi. Surjo W. Adji Dengan demikian DHP dapat dirumuskan sebagai berikut :
DHP = 2π.QD.n ... (2.7)
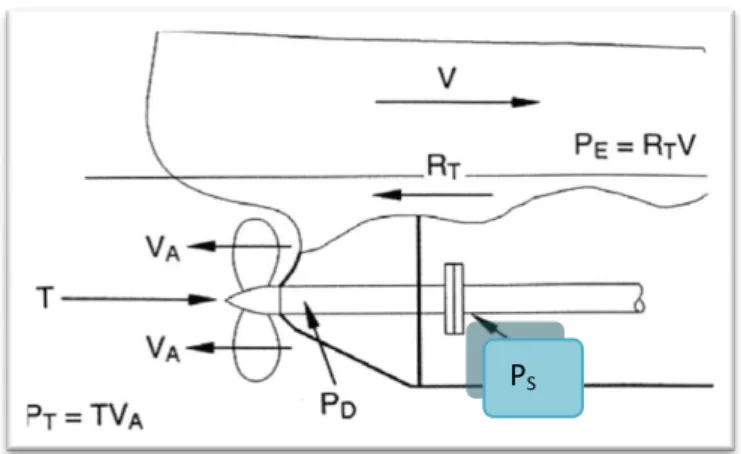
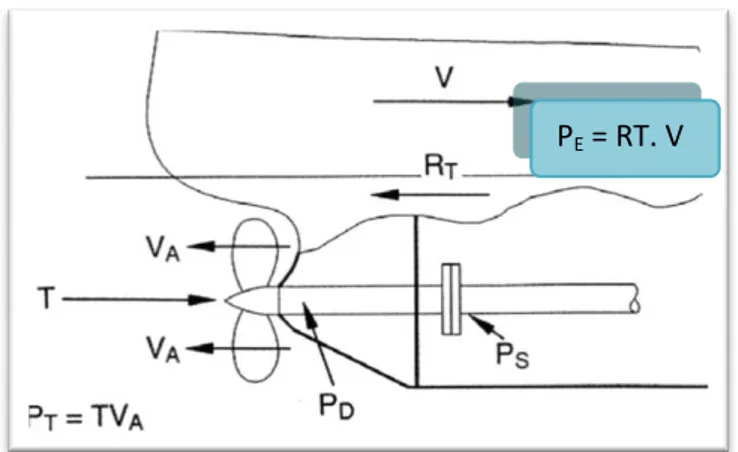
d. THP (Thrust Horse Power) adalah gaya dorong yang digunakan oleh propeller untuk menggerakkan kapal.
Gambar 2.5 Fungsi THP/PT
Sumber : Efisiensi Propulsi. Surjo W. Adji
Dari gambar diatas, maka nilai THP dapat dirumuskan sebagai berikut : THP = T.Va ... (2.8)
Dimana : T = Thrust PT = T. VA
Thrust adalah gaya dorong yang ditimbulkan dari gaya angkat / lift pada bagian belakang propeller yang bergerak serta searah dengan gerakan kapal. Thrust akan semakin kecil akibat bertambahnya beban tarik (Tahanan kapal) tetapi putaran propeller memperbesar pada momen torsi konstan. Dimana thrust maksimum terjadi pada bollard pull.
Thrust dapat diperoleh dengan menggunakan rumus sebagai berikut (Caldwells: 1988) :
T = RT / (1 - t) ... (2.9)
e. EHP (Effective Horse Power) adalah besarnya tenaga yang digunakan untuk menggerakkan kapal.
Gambar 2.6 Fungsi EHP/PE
Sumber : Efisiensi Propulsi. Surjo W. Adji
Dari gambar diatas, maka nilai EHP dapat dirumuskan sebagai berikut : EHP = RT . V / 75 (HP) ... (2.10)
Dimana :
V = Kecepatan kapal RT = Tahanan total kapal
Hubungan antara daya – daya tersebut diatas adalah : IHP BHP X BHP DHP X DHP THP X THP EHP IHP EHP THP = EHP x (1-t) / (1-w) = ηh ... (2.11) Dimana : ηh = Effisiensi hull
(1-t) = Thrust deduction factor (1-w) = Wake fraction
2.3.1. Arus Ikut (Wake)
Arus ikut adalah perbedaan antara kecepatan kapal dengan kecepatan aliran air menuju propeller. Pada saat kapal bergerak, gesekan air pada permukaan lambung menimbulkan lapisan air yang mengikuti arah gerakan kapal. Membagi perbedaan ini dengan kecepatan kapal atau dengan kecepatan aliran air menghasilkan dua harga koefisien arus ikut (wake fraction). Pendapat ini dikemukakan oleh Taylor (Taylor wake fraction) dan oleh Froude (Froude wake fraction). (Mansyur Hasbullah: 2003):
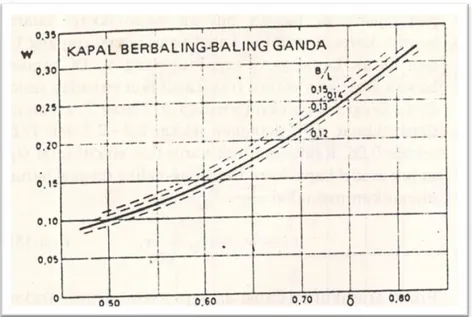
w = (0,5 . Cb) – 0,05 untuk Single Screw
w = (0,5 . Cb) – 0,20 untuk Twin Screw ... (2.12) Harga koefisien arus ikut kapal berbaling – baling ganda dapat dilihat dari kurva sebagai berikut :
Gambar 2.7 Fraksi Arus Ikut Kapal Berbaling-Baling Ganda Sumber : Tahanan dan Propulsi Kapal. Sv. Aa. Harvald. 1982
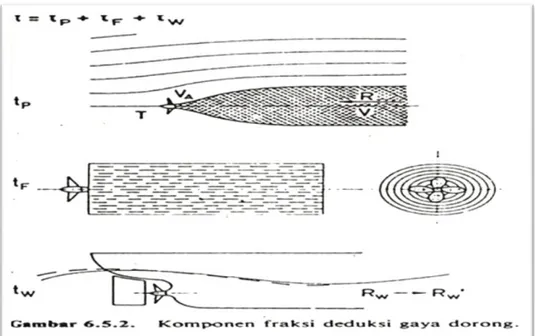
2.3.2. Fraksi Deduksi Gaya Dorong (Thrust Deduction Fraction)
Gaya dorong (T) yang diperlukan untuk mendorong kapal pada kecepatan v akan lebih besar dari pada tahanan RT yang akan dialami kapal bila di tarik
pada kecepatan yang sama . kehilangan gaya dorong (T- RT) dinyatakan dalam
fraksi gaya dorong T dan di sebut Fraksi deduksi gaya dorong (Harvald, 1992). Adapun gaya dorong ini dapat kita hitung dengan formula sebagai berikut: (Engine Propeller Matching, S. W. Adji, hal. 3)
t = (0,5 x Cp) – 0,19 (kapal dengan twin screw) ... (2.13) Adapun komponen dari fraksi deduksi gaya dorong dapat dilihat dari gambar berikut ini:
Gambar 2.8 Komponen Fraksi Deduksi Gaya Dorong Sumber : Tahanan dan Propulsi Kapal. Sv. Aa. Harvald. 1982
2.3.3. Kecepatan Air Masuk Ke Propeller (Va)
Kecepatan air masuk ke propeller dapat dihitung dengan formula sebagai berikut :
Va = Vs (1-w), Knot ... (2.14) Dimana : Vs = Kecepatan kapal (Knot)
2.3.4. Taylor Coeficient (Bp-δ)
Angka Taylor Coeficient dapat dihitung dengan formula sebagai berikut : Bp = 〖𝑃𝑠〗^0,5/〖𝐷𝑝. 𝑉𝑎〗^1,5 ... (2.15)
Dimana :
Dp = Diameter propeller (feet) Va = Kecepatan air masuk (Knot)
2.3.5. Explanded Blade Area Ratio (Ae / Ao)
Ae / Ao dapat dihitung dengan formula sebagai berikut :
Ae / Ao = ((1,3 + 0,3. 𝑍). 𝑇)/((𝑃𝑜 − 𝑃𝑣). 𝐷^2 ) + k ... (2.16) Dimana :
Z = Jumlah daun propeller T = Thrust (gaya dorong) k = Konstanta dari 0 ~ 0,2
Po-Pv = Tekanan pada pusat propeller (N/m2) D = Diameter propeller (m)
2.3.6. Efisiensi Propeller
Efisiensi propeller adalah merupakan ukuran performance propeller terhadap produktivitasnya dalam menghasilkan daya dorong.
Ukuran baik baik buruknya baling-baling dalam menghasikan gaya dorong dinyatakan dengan efisiensi baling-baling. Kerugian energi baling-baling pada waktu bekerja di belakang kapal, secara umum dibedakan atas (Baker E.III:1988)
Kerugian akibat sejumlah massa yang bergerak berputar ke belakang. Energi dihabiskan akibat gesekan-gesekan dari partikel air itu sendiri. Kerugian ini dapat dikurangi dengan mempergunakan sistem putaran lambat pada massa air yang banyak. Jadi dipergunakan baling-baling dengan diameter besar dengan jumlah putaran yang lambat. Meskipun demikian baling-baling dengan diameter sebesar bagaimanapun tidak akan mempunyai effisiensi lebih dari 70 %.
Kerugian karena adanya daya tahan pada daun propeller sewaktu bergerak didalam air. Hal ini disebabkan oleh viskositas air dan gesekan air pada daun tersebut. Kerugian ini dikurangi dengan mempergunakan daun propeller yang kecil. Dengan memperkecil luas tiap daun maka luas permukaan daun berkurang. Untuk mendapat luasan permukaan daun total yang sama seperti sebelum daun diperkecil maka jumlah daun ditambah tetapi effisiensi daun berkurang.
Menurut hasil percobaan ditangki percobaan, Hanya sedikit perbedaan effisiensi pada propeller berdaun tiga dengan empat dan antara empat dengan lima. Efisiensi akan berkurang dengan bertambahnya jumlah daun propeller (Z). Keuntungan daun propeller berdaun banyak untuk mengurangi getaran kapal yang ditimbulkan oleh propeller terutama pada besar dengan propeller tunggal.
Gambar 2.9 Fungsi ηp pada sistem propulsi
Sumber : Efisiensi Propulsi. Surjo W. Adji PT = T. VA PD
Efisiensi propeller didefinisikan sebagai berikut : η = 𝐸𝐻𝑃𝑆𝐻𝑃
= ηo. ηh. ηrr . ηs. ... (2.17)
2.4. Koefisien Propulsi
Koefisien Propulsi adalah harga perbandingan antara EHP (dari bahan kapal tanpa adanya tonjolan – tonjolan dan kelonggaran – kelonggaran lain) dengan BHP untuk motor diesel dan SHP (Shaft Horse Power) atau daya yang disalurkan mesin ke poros untuk kapal – kapal turbin.
PC = EHP / SHP = QPC = ηo. ηh. ηrr . ηs. ... (2.18)
Dimana :
ηo = Efisiensi propulsi
ηh = Efisiensi lambung
ηrr = Efisiensi relative rotative
2.5. Karakteristik Baling – baling Kapal
Setiap tipe dari masing-masing baling kapal memiliki karakteristik kurva kinerja yang berbeda-beda. Sehingga kajian terhadap karakteristik baling-baling kapal tidak di-generalized untuk keseluruhan bentuk dari baling-baling. Model persamaan untuk karakteristik kinerja baling-baling kapal adalah sebagi berikut (Surjo. W. Adji, 2009:6):
Koefisien angka maju, (J) = 𝑛 .𝐷𝑉𝑎
…...….…... (2.19) Putaran propeller (Rpm), n = 1/J x Va/ D x 60 ...…... (2.20)
Koefisien daya dorong, (KT) = 𝑇 𝜌.𝑛2𝐷4
…………....…. (2.21) Koefisien Torsi, (KQ) = 𝑄 𝜌.𝑛2𝐷5
…………... (2.22) Dimana: T = Gaya dorong (N) Q = Torsi propeller (Nm)
ρ = Massa jenis air laut (1,025 ton m) n = Putaran propeller (rpm)
Va = Kecepatan air masuk ke propleller (m/s) D = Diameter propeller (m)
Berdasarkan buku “Tahanan dan Propulsi Kapal” Sv.Aa. Harvald hal.143, angka KT dan KQ sangat ditentukan oleh diameter propeller dan tenaga kuda penggerak kapal dikurangi kerugian – kerugian akibat bantalan poros dan sebagainya. Besar kerugian tersebut adalah 5% untuk mesin ditengah kapal dan 8% untuk mesin dibelakang kapal.
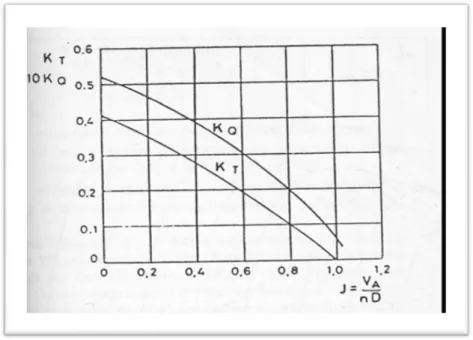
Nilai KQ, KT dapat dilihat dari diagram berikut ini :
Gambar 2.10 Diagram KQ, KT
Sumber : Tahanan dan Propulsi Kapal. Sv. Aa. Harvald. 1982
Nilai KT dapat di peroleh dari grafik KT – KQ – J adalah koefisien
kecepatan maju yang besarnya adalah :
J = Ve / n . D ... (2.23)
Dimana :
Ve = Kecepatan air masuk propeller (m/s) n = Putaran propeller (rpm)
D = Diameter propeller (m)
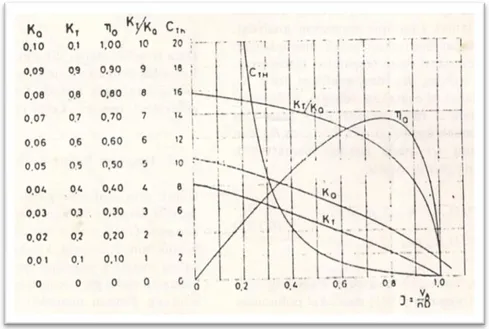
Gambar 2.11 Rasio KT/ KQ
Sumber : Tahanan dan Propulsi Kapal. Sv. Aa. Harvald. 1982
2.6. Karakteristik Pembebanan Propeller
Pemilihan propeller yang akan digunakan dalam perancangan sistem propulsi diorientasikan pada tipe Waganigen B – series dengan diameter dan jumlah daun propeller berdasarkan perhitungan.
Untuk mendapatkan korelasi pembebanan, data tahanan kapal dibentuk kedalam persamaan matematis, tahanan per displacement merupakan fungsi dari kecepatan sehingga :
RT/∆ ≈ f {α . Vsn}
Persamaan karakteristik tahanan adalah persamaan polynominal ordo 2, bentuk persamaan karakteristik tahanan sebagai berikut :
y = α1x2 + α2x + c
propeller dapat diperoleh dengan mengubah persamaan diatas dalam thrust coeffisient berdasarkan persamaan berikut :
RT / ∆ = T / ∆ x (1 – t), dan RT / ∆ = f {α . Vsn}
Sehingga dapat dinyatakan menjadi :
F {α . Vsn} = T / ∆ . x . (1 – t) bila RT = α1 . Vs2 + α2 . Vs + c
dan jika diketahui bahwa, J2 = 𝑛𝑉𝑎2𝐷2 , maka model persamaan dituliskan : T x (1 – t) = α1 𝑉𝑎 1−𝑤 2 + α2 𝑉𝑎 1−𝑤 + c
Selanjutnya dengan thrust propeller adalah :
T = ∝1 𝑉𝑎 1−𝑤 2 + ∝2 1−𝑤𝑉𝑎 1−𝑡 + c
dilain pihak, thrust propeller dapat diformulasikan sebagai berikut : T = KTρn2D2
Dengan mengkombinasikan kedua persamaan thrust propeller diperoleh :
KT = ∝1+ 𝑉𝑎2+ ∝2 1−𝑤 𝑉𝑎 +𝑐 1−𝑤 2 1−𝑤 2 1−𝑡 𝜌𝐷2 KT = ∝1+ ∝2 1−𝑤 𝑉𝑎 +𝑐 1−𝑤 2𝑉𝑎2 1−𝑤 2 1−𝑡 𝜌𝐷2 J 2
dan lebih sederhana apabila
K* =
{∝1+ ∝2 1−𝑤 𝑉𝑎 +𝑐 1−𝑤 2𝑉𝑎2 }
1−𝑤 2 1−𝑡 𝜌𝐷2
2.7. Gaya Dorong (Thrust)
Thrust adalah gaya dorong yang ditimbulkan dari gaya angkat / lift pada bagian belakang propeller yang bergerak serta searah dengan gerakan kapal. Thrust akan semakin kecil akibat bertambahnya tahanan kapal, tetapi putaran propeller memperbesar pada momen torsi konstan. Dimana thrust maksimum terjadi pada kondisi bollard pull.
Thrust dapat diperoleh dengan rumus sebagai berikut :
T = KT . ρ . n2 . D4 ... (2.25)
Dimana :
KT = Koefisien gaya dorong
ρ = Density air laut (1,025 ton . m) n = Putaran propeller (Rps)
D = Diameter propeller (m)
Sedangkan besarnya gaya dorong yang menggerakkan kapal dapat di ketahui dengan mereduksi dengan faktor reduksi thrust (Thrust Deduction Factor) yang besarnya merupakan fungsi linear dari kecepatan, sehingga diperoleh :
Ttb = T (1 - t)
2.8. Baling – baling Di Dalam Tabung (Kort Nozzle)
Beban gaya dorong dapat diubah dengan jalan memasang foil udara mengelilingi baling – baling yang diselubungi atau unit baling – baling di dalam tabung (nozzle). Unit ini juga disebut sebagai tabung Kort.
Peningkatan kualitas propulsi dapat dilakukan dengan jalan menurunkan beban gaya dorong karena secara teori mengatakan beban gaya dorong yang tinggi memberikan efisiensi yang rendah, sebaliknya beban gaya dorong yang rendah memberikan efisiensi yang tinggi. (Tahanan dan Propulsi K:apal. Sv. Aa. Harvald. 1982).
Untuk mendapatkan gaya dorong yang lebih, baling – baling harus memindahkan air sebanyak mungkin dalam waktu yang ditentukan. Kort nozzle akan membantu baling – baling untuk melakukan hal ini. Daun propeller yang memutar di air menghasilkan tekanan daerah tinggi di belakang setiap daun dan daerah tekanan rendah di depan dan perbedaan tekanan inilah yang memberikan kekuatan menggerakkan kapal.
Gambar 2.12 Skema Baling – baling Dalam Tabung Sumber : Tahanan dan Propulsi Kapal. Sv. Aa. Harvald. 1982
Dengan adanya tabung – tabung tersebut dan tergantung pada bentuk tabung itu sendiri, aliran yang melalui tabung tersebut akan mengalami percepatan atau perlambatan. Percepatan aliran akan menyebabkan turunnya beban gaya
dorong dan naiknya efisiensi baling – baling. Perlambatan aliran pada umumnya akan mengakibatkan karakteristik kavitasi yang baik.
Gambar 2.13 Skema Asaz Kerja Baling – baling Dalam Tabung Sumber : Tahanan dan Propulsi Kapal. Sv. Aa. Harvald. 1982
Asaz kerja baling – baling yang diselubungi mirip dengan asaz kerja pompa aksial. Dinding tersebut akan menurunkan kekuatan pusaran ikut pada ujung daun, dan bahkan akan dapat menghilangkan pusaran tersebut jika sela antara ujung daun dengan dinding tabung cukup kecil. Karena itu untuk mendapatkan efisiensi setinggi mungkin maka sela antara ujung daun dengan dinding tabung harus dibuat sekecil mungkin, sekitar 0,001 diameter propeller.
Gambar 2.14 Harga η maks untuk berbagai jenis alat penggerak Sumber : Tahanan dan Propulsi Kapal. Sv. Aa. Harvald. 1982
Dari grafik diatas menunjukkan bahwa nilai optimal efisiensi baling – baling dalam kort nozzle untuk kapal tunda adalah 0,45.