Halaman | 33
BAB III
PENENTUAN ZENITH TROPOSPHERIC DELAY
3.1 Akuisisi Data
Data yang dibutuhkan dalam pengolahan data dikategorikan menjadi data observasi dan data meteorologi. Setiap data yang diambil berpengaruh dalam proses pengolahan data dan merupakan komponen utama yang mempengaruhi hasil dan analisis data. Data yang dipergunakan adalah data RInex, informasi orbit, earth rotation
pole, bias ionosfer, dan data meteorologis. Untuk lebih jelasnya data yang dipergunakan
dapat dilihat penjelasan sebagai berikut,
3.1.1 Data Observasi
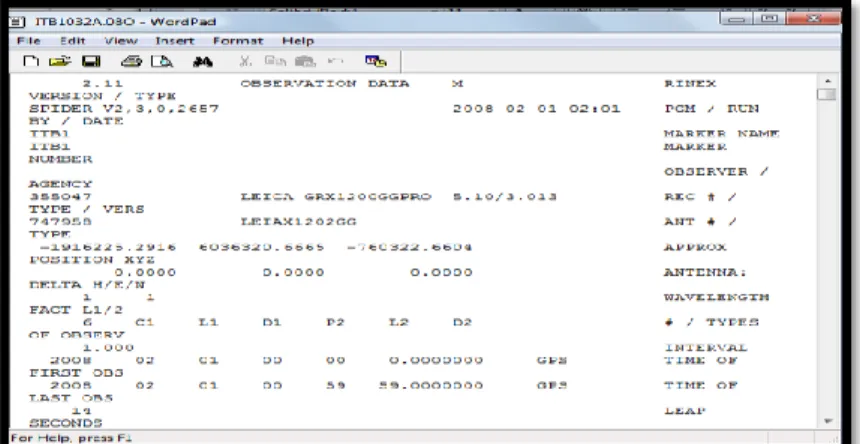
RINEX
Merupakan data observasi dalam bentuk format umum yang dapat diolah oleh software yang berbeda. Data ini berisi informasi utama yaitu waktu pengamatan, interval epok pengamatan, nomor satelit, nomor antena, nomor receiver, koordinat estimasi titik pengamatan, serta data pendukung lainnya yang dijelaskan sesuai header RINEX. Untuk contohnya dapat dilihat pada gambar 3.1,
Halaman | 34
Data Observasi yang digunakan adalah data observasi dari CGPS-ITB dan Bakosurtanal. Waktu pengamatan dilakukan mulai tanggal 27 januari 2008 hingga 9 februari 2008 (14 hari pengamatan secara kontinyu). Data RINEX yang diambil memiliki perbedaan interval epok pengamatan yaitu data CGPS-ITB memiliki interval epok 1 detik sedangkan data Bakosurtanal memiliki interval epok 30 detik. Data RINEX CGPS-ITB dapat diambil melalui http://corsgps.gd.itb.ac.id/... dan data Bakosurtanal melaluihttp://garner.ucsd.edu/pub/rinex/2008/. Data observasi tersebut memiliki format *.YYo. (“YY” adalah tahun pengamatan dan “o” adalah observasi).
Informasi Orbit
Informasi orbit adalah informasi yang menunjukkan informasi posisi satelit dan ketelitian posisi satelit. Informasi Precise Ephemeris dapat diambil melalui
ftp://ftp.unibe.ch/aiub/... Dalam format *.SP3 (untuk digunakan ganti format *.SP3
menjadi *.PRE agar dapat digunakan dalam perangkat lunak Bernese). Data yang diambil adalah data IGSwwwwd.SP3 dan IGUwwwwd.SP3 (“wwww” adalah minggu GPS dan “d” menunjukkan hari pengamatan) dalam format terkompresi. Data untuk pengolahan adalah minggu GPS ke 1464,1465, dan data minggu 1480 untuk sampel.
Earth Rotation Pole
Berisi koordinat pergerakan kutub dalam format *.ERP. Data yang digunakan merupakan final orbit dalam format CODwwwwd* dalam format yang terkompresi. Data ini dapat diekstrak, kemudian diubah *.ERP menjadi *.IEP (format IERS), selanjutnya diolah untuk mendapatkannya dalam format bernese *.ERP. Data yang diambil adalah data COD14647.ERP dan COD14657.ERP.
Ionosfer
Data ini berisi koreksi delay ionosfer dalam bentuk format CODwwwwd.ION yang berisi data TEC (Total Electron Content). Data yang diambil adalah data COD 14640.ION dan COD14656.ION. Data ini dapat diambil pada situs IGS (International GNSS
Halaman | 35
Informasi Bias SatelitData informasi bias code satelit dalam format *DCB. Data ini dapat diambil pada situs IGS (International GNSS Service).
3.1.2 Data Meteorologis (sampel)
Pengambilan data sampel dilakukan pada tanggal 23 – 24 Mei 2008. Menggunakan alat mekanik altimeter untuk mengukur tekanan udara pada titik pengamatan, alat higrometer untuk mengukur kelembaban pada titik pengamatan, dan alat termometer untuk mengukur temperatur di titik pengamatan.
3.2 Pengolahan Data
Keakurasian data sangat berhubungan dengan tipe data yang digunakan, kualitas data observasi, level dari kesalahan, dan bias. Jenis data yang digunakan dalam pengolahan data ini adalah fase. Bias ionosfer dapat direduksi dengan menggunakan model kombinasi linier L3, sedangkan bias troposfer dijadikan sebagai parameter yang
dicari. Geometri satelit pada intinya mempengaruhi jumlah dan kualitas data yang datang ke receiver. Sudut elevasi 10o digunakan untuk mendapatkan geometri satelit yang optimal serta mengurangi data yang buruk seperti kesalahan multipath. Lama pengamatan selama 14 hari dari tanggal 27 Januari – 9 Februari 2008.
Metode penentuan ZTD menggunakan cara diferensial dengan memakai titik pengamatan di Bakosurtanal (sebagai titik ikat) dan CGPS-ITB (titik pengamatan). Strategi pemprosesan data adalah post processing dengan berbagai strategi pengeliminasian dan pengkoreksian kesalahan serta bias.
Kesalahan orbit adalah kesalahan dimana orbit yang dilaporkan tidak sesuai dengan orbit satelit yang sebenarnya, kesalahan ini direduksi dengan menggunakan data orbit yang memiliki akurasi teliti seperti precise ephemeris, salah satunya adalah produk Final ephemeris. Hasil ZTD menggunakan final ephemeris dijadikan referensi untuk perbandingan dengan menggunakan ultra rapid ephemeris.
Halaman | 36
3.2.1 Proses Pengolahan Data Awal
Kualitas data merupakan salah satu faktor utama yang membatasi keakuratan hasil yang didapatkan. Pada metode diferensial, beberapa kesalahan dan bias dapat direduksi atau dihilangkan sehingga data yang dihasilkan lebih baik daripada proses PPP (tentunya dengan strategi pengolahan data yang benar). Pengolahan data menggunakan peragkat lunak dapat membantu proses ini. Salah satu perangkat lunak yang dapat melakukan proses ini adalah Bernese 5.0.
Dalam perangkat lunak Bernese 5.0 dapat diketahui beberapa sub program seperti : POLUPD, sub program ini mengubah nilai komponen informasi IGS menjadi
bentuk ERP (earth Rotation Pole) dalam format Bernese.
PRETAB, sub program ini mengubah data informasi precise orbit ke dalam
bentuk tabel yang dapat dibaca Bernese dalam format TAB.
ORBGEN, sub program ini mengubah data informasi TAB dan ERP menjadi data
standar orbit dalam bentuk format Bernese. ORBGEN mentransformasikan precise orbit dari terestrial ke dalam celestial reference frame atau dengan kata lain mentransformasikan koordinat satelit ke dalam 6 elemen kepler kemudian menyiapkan apa yang disebut standar orbit dengan menggunakan posisi satelit pada tabular orbit satelit sebagai pseudo-observation pada perataan kuadrat terkecil.
3.2.2 Filtering data GPS
Smoothing Data (phase cleaning)
Salah satu masalah dalam penentuan pada metode diferensial adalah mengetahui dan mendeteksi kesalahan dari pengaruh luar serta cycle slip dalam pengamatan, walaupun dalam pengolahan secara diferensial beberapa sumber kesalahan data dapat direduksi sedemikian rupa agar hilang/tidak berpengaruh besar terhadap kualitas data.
Proses Smoothing data bertujuan untuk memeriksa cycle slip data fase pada gelombang pembawa L1 dan L2. Pada tahap ini juga terjadi pembersihan akibat
Halaman | 37
kesalahan dari bias ionosfer dan geometri menggunakan kombinasi linier. Tahapan secara Umum dapat dilihat pada gambar 3.2 [Dach et al., 2007] sebagai berikut,Kombinasi Linier Melbourne – Wubbena 𝐿6=
1
𝑓1− 𝑓2∗ (𝑓1𝐿1− 𝑓2𝐿2) − 1
𝑓1+ 𝑓2∗ (𝑓1𝐿1− 𝑓2𝐿2) Persamaan Kombinasi Linier Geometri –free (L4)
𝐿4= 𝐿1− 𝐿2
Persamaan Kombinasi linier ionosfer –free (L3 – P3) 𝐿3= 1 𝑓12− 𝑓 22 ∗ (𝑓12 1𝐿1− 𝑓22𝐿2) 𝑃3= 1 𝑓12− 𝑓 22 ∗ (𝑓12 1𝑃1− 𝑓22𝑃2) Hasil Akhir
Smoothing data fase dan kode
Gambar 3.2 Proses untuk smoothing data observasi [Dach et al., 2007]. Dari tahapan pada gambar 3.2, data dalam format RINEX akan diolah dalam empat proses penting, tahapan tersebut adalah :
Kombinasi linier Melbourne – Wubbena adalah sebuah kombinasi linier dengan data fase (L1 dan L2) dan kode (P1 dan P2) dari data yang diamati [Wubbena and
Melbourne, 1985, dikutip Dach et al., 2002]. Kombinasi linier ini digunakan untuk filtering data dalam pendeteksian outlier dan cycle slip. Persamaan ini digunakan untuk
mengeliminasi dampak pengaruh bias ionosfer dan geometri satelit. Kombinasi ini hanya untuk pengestimasian outlier dan cycle slip yang kemudian diestimasi besarnya dengan menggunakan kombinasi linier L4.
Persamaan kombinasi linier L4 digunakan untuk menentukan besarnya cycle slip
Halaman | 38
pada tahap penyaringan kombinasi linier L6. Hal ini dilakukan mengingat pada data fase cycle slip adalah masalah utama dimana nilai ambiguitas fase akan dipengaruhi oleh cycle slip. Kombinasi linier ini dapat mereduksi pengaruh kesalahan jam dan geometripengamatan, sedangkan bias ionosfer dan ambiguitas fase masih tetap ada.
Kombinasi linier ionosfer free (L3) menyaring perbedaan data kedua pengamatan
(kode dan fase). Cara ini untuk menghilangkan data buruk yang lolos pada proses filter sebelumnya. Secara praktis kombinasi linier ini mampu mengeliminir bias ionosfer yang terdapat dalam pengamatan data GPS sehingga mendapatkan data “bersih” hasil
smoothing data pengamatan kode dan carrier phase. Hasil smoothing pada Bernese
berformat *.SMT (hasil sub program RNXSMT).
3.2.3 Perangkat Lunak Bernese 5.0 (untuk penentuan nilai ZTD)
Bernese version 5.0 merupakan GPS processing software yang dikembangkan
oleh Astronomical Institute University of Berne di Switzerland. Bernese dapat digunakan untuk GPS geodetik processing dan membuat beberapa strategi sesuai dengan keinginan user [Dach et al., 2007].
Bernese Pre-Processing
Sebelum penentuan ZTD, beberapa langkah dilakukan untuk mendapatkan data GPS yang “bersih” agar dihasilkan estimasi ZTD yang optimal. Data observasi harus dikonversikan ke dalam format Bernese serta membuat data informasi orbit ke dalam format Bernese.
Pada dasarnya, data GPS perlu dilakukan pre-processing untuk mendapatkan nilai ZTD. Posisi satelit dan posisi titik pengamatan harus diketahui untuk mendapatkan nilai ZTD karena tingginya korelasi antara elevasi komponen basah dan hidrostatik yang tergantung model untuk digunakan dalam pre-processing. Tahapan pre-processing meliputi CODSPP, SNGDIF, MAUPRP, dan GPSEST. Untuk lebih jelasnya dapat dilihat pada Gambar 2 [Victoria, 2005],
Halaman | 39
Gambar 2. Pre-Processing dalam Bernese CODSPP
Jam receiver harus disinkronisasikan dengan waktu GPS. CODSPP mengkomputasi kesalahan jam satelit menggunakan pengukuran zero difference code serta memberikan aposteori kesalahan RMS dalam estimasi posisi. Hasil output CODSPP membantu untuk memeriksa apakah hasil pengukuran cukup baik untuk pengolahan
Data RINEX
Code Zero Differences Phase Zero Differences
CODSPP Informasi Orbit
Phase Zero Differences
SNGDIF
Phase Single Differences
MAUPRP
Phase Single Differences
GPSEST
Phase Double Differences
GPSEST Result
Halaman | 40
lebih lanjut. Hasil pengolahan CODSPP akan menyimpan offset jam dalam observasi fase. Program CODSPP menggunakan kombinasi linier ionospheric free dalam standar perataan least squares untuk menghitung parameter yang tidak diketahui, seperti koreksi jam receiver serta koreksi koordinat receiver. Rumus dari kombinasi linierionospheric free (L3) dapat ditulis sebagai berikut [Dach et al., 2007],
𝐿3= 𝑓 1
12−𝑓22 𝑓1
2𝐿
1−𝑓22𝐿2 (3.1)
Dimana,
f1, f2 adalah frekuensi sinyal GPS
L1, L2 adalah pengukuran fase dari sinyal GPS
SNGDIF
SNGDIF merupakan program yang membuat data single difference baik code maupun fase. Program ini diperlukan mengingat data yang digunakan untuk double
difference adalah single difference antar receiver. Jika ada N receiver yang digunakan
untuk pengukuran secara simultan, maka didapatkan N zero difference untuk tiap satelit per epok. Program ini membuat satu set N-1 baseline satu sesi dalam bentuk single
difference.
MAUPRP
Receiver mengukur perbedaan antara fase dari satelit dengan fase receiver yang dibentuk dalam sinyal. Pengukuran ini berbentuk nilai antara 0 dan 1 cycle (0 dan 2π). Akumulasi fase merupakan penjumlahan dari pengukuran langsung fase dan berjumlah sesuai jumlah nilai integer (0 – 1). fase terukur yang tidak diketahui adalah ambiguitas fase. Ambiguitas fase disebabkan oleh cycle slip yang mungkin terjadi akibat obstruksi sinyal satelit seperti pohon, gedung, dll, dan dari sinyal yang lemah hingga noise ratio.
MAUPRP memeriksa data observasi dan menemukan interval waktu saat observasi yang rusak akibat cycle slip dan memperbaikinya bila mampu. Tahapan MAUPRP adalah sebagai berikut,
Halaman | 41
Automatic Cycle Slip detection, adalah salah satu tahapan program untukmengkoreksi diskontinyu data single difference seperti perbedaan waktu receiver yang umum terjadi pada satelit.
Checking by Smoothing, adalah menggunakan algoritma untuk menemukan
interval waktu dimana cycle slip tidak muncul.
Triple difference solution, adalah solusi yang menggunakan perataan least square pada tiap baseline untuk mendeteksi kesalahan akibat cycle slip.
GPSEST digunakan untuk menentukan nilai delay troposper menggunakan
double difference dengan tahapan,
Pertama, menentukan koordinat dari stasiun pengamat menggunakan
ionospheric free linear (L3) tanpa memecahkan ambiguitas fase. Proses ini dilakukan untuk memeriksa kualitas data dan mengestimasi koordinat titik pengamatan.
Kedua, ambiguitas fase dipecahkan menggunakan koreksi troposfer dan ionosfer. Penggunaan untuk memecahkan ambiguitas disesuaikan dengan tujuan. Ada beberapa seperti SEARCH, ROUND, SIGMA, dll.
Terakhir, GPSEST akan menghasilkan final koordinat untuk parameter troposfer titik pengamatan. Program ini menggunakan double difference dan kombinasi
ionospheric free linear untuk mendapatkan nilai delay troposfer. Proses yang dilakukan
pada setiap tahapan adalah perataan least-square.
Selama proses penentuan ZTD, digunakan Niell mapping function. Penggunaan
mapping function ini karena terbatasnya pilihan mapping function dan dry Niell
merupakan rekomendasi dalam estimasi komponen delay troposfer, dimana Niell sesuai untuk data observasi dengan sudut elevasi diatas 3o[Dach et al., 2007]. Untuk Proses keseluruhan dalam penentuan ZTD dapat dilihat pada gambar 3 sebagai berikut,
Halaman | 42
Gambar 3. Penentuan ZTD menggunakan Bernese3.3 Ekstraksi Data ZHD dan ZWD
Delay troposfer dapat dipisahkan menjadi 2 bagian yaitu komponen hidrostatik dan basah. Beberapa model dapat mengestimasi nilai komponen hidrostatik dan basah. Komponen hidrostatik merupakan 90% dari total nilai ZTD keseluruhan. Sisa kurang lebih 10% merupakan pengaruh komponen basah yang terkait dengan uap air dan sulit untuk dideskripsikan menggunakan model karena dipengaruhi oleh variasi spasial dan temporal [Hoffman-Wellenhof et al., 1992].
Saat delay hidrostatik atau delay basah dapat dimodelkan di zenith, maka
mapping function yang digunakan dapat dijelaskan dengan sederhana sebagai berikut,
𝑑𝑡𝑜𝑡 = 𝑑ℎ𝑧𝑚ℎ 𝜀 + 𝑑𝑤𝑧𝑚𝑤 𝜀 (3.2) RAW data CRX2RNX PRETAB, ORBGEN, POLUPD, SATRMS CODSPP, SNGDIF, MAUPRP GPSEST ZTD = dh(trop) – dh(non-trop) RNXSMT RXOBV3 Informasi Orbit IGS Data Pengamatan IEP, SP3, COD, DCB file format Proses Dalam Bernese 5.0
Halaman | 43
Dimana,dtot = adalah total delay troposfer dari pengukuran GPS. dhzmh ε = adalah mapping function dari komponen hidrostatik. dwzmw ε = adalah mapping function dari komponen basah.
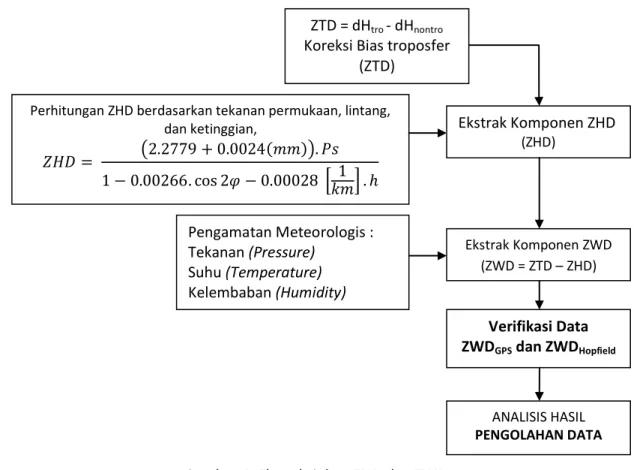
Secara Skema proses mendapatkan komponen hidrostatik dan komponen basah dapat dijelaskan pada gambar 4 sebagai berikut,
Gambar 4. Ekstraksi data ZHD dan ZWD
3.3.1 Model Hydrostatic Delay (ZHD)
Untuk mendapatkan komponen hidrostatik dari ZTD dapat ditentukan dari model dan pengukuran tekanan permukaan titik pengamatan yang akurat. Model yang digunakan adalah model Saastamoinen [Saastamoinen, 1972 dikutip Permana, 2002]. Model ini umumnya dapat diterima dengan alasan model ini memiliki kesalahan dalam
ANALISIS HASIL PENGOLAHAN DATA Ekstrak Komponen ZHD (ZHD) 𝑍𝐻𝐷 = 2.2779 + 0.0024 𝑚𝑚 . 𝑃𝑠 1 − 0.00266. cos 2𝜑 − 0.00028 1𝑘𝑚 . ℎ
Perhitungan ZHD berdasarkan tekanan permukaan, lintang, dan ketinggian, Pengamatan Meteorologis : Tekanan (Pressure) Suhu (Temperature) Kelembaban (Humidity) Verifikasi Data ZWDGPS dan ZWDHopfield Ekstrak Komponen ZWD (ZWD = ZTD – ZHD) (ZWD = ZTD-ZHD) ZTD = dHtro - dHnontro
Koreksi Bias troposfer (ZTD)
Halaman | 44
level milimeter [Bevis et al., 1992 dikutip Victoria, 2005]. Model tersebut dapat dijelaskan sebagai berikut,𝑑
ℎ𝑧=
0.22765𝑃𝑎1−0.00266.cos 2𝜑 − 0.00028ℎ (3.3)
Dimana,
𝑑ℎ𝑧 = adalah nilai Zenith Hydrostatic Delay dalam cm.
𝑃𝑎 = adalah tekanan permukaan titik pengamatan dalam mb. 𝜑 = adalah lintang geodetik titik pengamatan.
ℎ = adalah tinggi titik pengamatan diatas msl dalam km.
Model Saastamoinen memiliki keuntungan untuk digunakan dengan alasan informasi yang digunakan hanya membutuhkan tekanan permukaan dan lokasi titik pengamatan [Victoria, 2005].
3.3.2 Model Wet Delay (ZWD)
Model wet delay memiliki ketelitian kurang dari yang dimiliki oleh model hidrostatik, hal ini dikarenakan uap air tidak berkorelasi dengan pengukuran meteorologi di permukaan dan memiliki variasi spasial dan temporal. Dari alasan sebelumnya, untuk menentukan model yang akurat cukup sulit dan umumnya model wet delay memiliki akurasi 2-4 cm [Shrestha, 2003].
Wet delay dalam pengukuran adalah model Hopfield yang dapat dijelaskan sebagai berikut,
𝑑
𝑤𝑠= 10
−6𝑁
𝑤𝑠𝐻𝑤 𝑒 5 (3.4) Dimana,dws = adalah wet delay.
Hwe = adalah tekanan parsial uap air di permukaan titik pengamatan dalam mb.
𝑁
𝑤𝑠= 3.73 𝑥 10
5 𝑒𝑠Halaman | 45
Nilai Nws merupakan rekfrativitas komponen basah di permukaan titik pengamatan[Smith and Weintraub, 1953 dikutip Shrestha, 2003].
Dari nilai ZWD, nilai PWV dapat ditentukan untuk mendapatkan pengamatan kondisi temporal. Untuk mendapatkan nilai precipitable water vapour, digunakan faktor konversi yang dilambangkan sebagai ∏ dengan nilai 0.15 (menganggap faktor pembelokan tidak ada). PWV memiliki artian secara meteorologis yang merepresentasikan berapa banyak air yang ada jika uap air di arah zenith dikembalikan ke bentuk liquid. Proses mendapatkan PWV dapat dilihat pada gambar 3.3,
![Gambar 3.2 Proses untuk smoothing data observasi [Dach et al., 2007].](https://thumb-ap.123doks.com/thumbv2/123dok/4617634.3373603/5.893.233.711.259.737/gambar-proses-untuk-smoothing-data-observasi-dach-et.webp)
![Gambar 3.3 Proses mendapatkan PWV dari ZTD [Victoria, 2005]](https://thumb-ap.123doks.com/thumbv2/123dok/4617634.3373603/13.893.200.741.455.719/gambar-proses-mendapatkan-pwv-ztd-victoria.webp)
