BAB 2
TINJAUAN PUSTAKA
2.1. Motor Induksi Tiga Fasa
Motor induksi adalah suatu mesin listrik yang merubah energi listrik menjadi energi gerak dengan menggunakan gandengan medan listrik dan mempunyai slip antara medan stator dan medan rotor. Stator adalah bagian dari mesin yang tidak berputar dan terletak pada bagian luar. Stator terbuat dari besi bundar berlaminasi dan mempunyai alur – alur sebagai tempat meletakkan kumparan. Rotor adalah bagian dari mesin yang berputar bebas dan letaknya bagian dalam. Rotor terbuat dari besi laminasi yang mempunayi slot dengan batang alumunium / tembaga yang terhubung singkat pada ujungnya.
Motor induksi merupakan motor arus bolak-balik yang paling banyak digunakan terutama dalam industri. Penamaannya berdasarkan cara memperoleh arus pada rotornya. Arus motor ini didapat bukan dari sumber tertentu tetapi secara induksi atau imbas, sebagai akibat adanya perbedaan relatif antara putaran rotor dan medan putar yang dihasilkan oleh arus stator.
Berdasarkan cara penamaan dan proses terjadinya medan putar rotor, maka prinsip kerja motor induksi tiga fasa adalah berdasarkan prinsip induksi elektromagnetik dimana bila sumber tegangan tiga fasa dipasang pada kumparan medan stator, maka akan timbul medan putar dengan kecepatan (n) yang ditunjukan pada Persamaan 2.1 [16],[17] :
Medan putar stator tersebut akan memotong batang konduktor pada rotor. Akibatnya pada kumparan jangkar atau rotor akan timbul tegangan induksi (ggl). Karena kumparan jangkar merupakan kumparan tertutup, ggl akan mengalirkan arus pada kumparan rotor. Adanya arus dalam medan magnet menimbulkan gaya pada rotor. Bila kopel mula yang dihasilkan oleh gaya rotor cukup besar untuk memikul kopel beban, rotor akan berputar searah medan putar stator.
Perbedaan kecepatan antara medan putar stator dengan perputaran rotor tersebut disebut dengan slip (S) dan dinyatakan dengan Persamaan (2.2) [2] :
%
Persamaan (2.2) dapat ditulis dengan Persamaan (2.3, 2.4, 2.5) :
n = n (1 − S) ... (2.3)
n = n
(1 − S)
... (2.4)
S = n − n ... (2.5) Dengan demikian Persamaan (2.5) slip rpm (kecepatan slip) menjadi Persaman (2.6) :
(n − n ) = S. n... (2.6) Maka diperolehlah frekuensi slip dengan Persamaan (2.7):
2.1.1. Pengaturan kecepatan motor induksi
Pengaturan kecepatan motor induksi dapat dilakukan dengan beberapa cara. Dengan mengacu pada Persamaan (2.1), maka variabel P (jumlah kutub) dan f (frekuensi) akan mempengaruhi kecepatan putar motor induksi [3]:
A. Pengaturan Kecepatan dengan Mengubah Jumlah Kutub Motor
Jumlah kutub motor induksi jenis sangkar bajing dapat diubah dengan merencanakan kumparan stator sedemikian rupa, sehingga dapat menerima tegangan masuk pada dua posisi kumparan yang berbeda, dengan perbandingan 1 : 2.
B. Pengaturan Kecepatan dengan Mengubah Frekuensi Jaringan
Selain jumlah kutub, pengubahan frekuensi juga dapat berpengaruh pada kecepatan putar motor induksi. Hal yang harus diperhatikan, bahwa dengan pengubahan frekuensi adalah kerapatan fluks yang ada harus diusahakan tetap, agar kopel yang dihasilkan pun tidak berubah, untuk itu tegangan jaringan pun harus diubah seiring dengan pengubahan frekuensi. Hal yang paling umum dalam penerapan cara ini adalah dengan menggunakan perangkat yang dikenal sebagai inverter .
C. Pengaturan Kecepatan dengan Mengubah Resistansi Tahanan Rotor
kerugian dari jenis ini adalah rendahnya efesiensi pada saat kecepatan putarnya dikurangi dan pengaturan kecepatan putarnya sangat dipegaruhi oleh perubahan beban yang dipikulnya.
D. Pengaturan Kecepatan dengan Mengubah Besarnya Slip
Dengan mengingat hubungan slip dengan daya listrik dan pengaruhnya terhadap tegangan dan kecepatan motor, maka metode ini pada prinsipnya menggunakan hubungan tersebut dengan menggunakan suatu alat tambahan, baik elektrik, maupun elektronik. Peralatan tambahan tersebut berupa sistem yang cukup rumit.
Dari sekian banyak metode untuk mengatur kecepatan putar motor induksi, cara dengan mengubah frekuensi jaringan adalah yang paling umum digunakan yaitu dengan menggunakan inverter . Dengan cara tersebut daerah pengaturan kecepatan putarnya cukup lebar [3].
2.2. Variable Speed Drive
sering digunakan adalah tipe ATV12H075M2 seperti pada Gambar 2.1 (Tabel lampiran 1), di mana tipe jenis ini memiliki input satu fasa dan keluarannya tiga fasa [15].
Secara sederhana untuk drive AC, Variable Speed Drive atau inverter akan mengubah AC ke DC yang kemudian diatur dengan suatu teknik penyaklaran ‘switching‘ mengubah DC menjadi tegangan dan frekuensi keluaran AC yang bervariasi. Ada empat jenis inverter yaitu [18]:
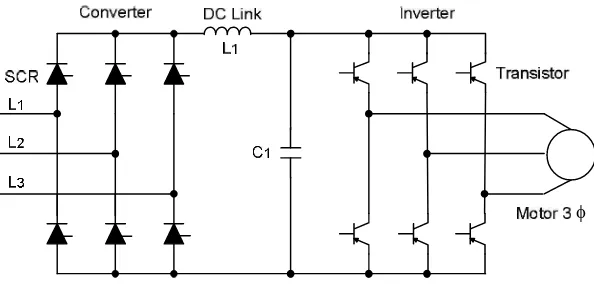
1. Variable voltage inverter (VVI)
Jenis inverter ini menggunakan konverter jembatan SCR untuk mengubah tegangan input AC ke DC. SCR adalah komponen elektronika daya yang memiliki kemampuan untuk mengatur nilai tegangan DC mulai dari 0 hingga mendekati 600
VDC. Induktor L1 sebagai choke dengan kapasitor C1 membentuk bagian dengan istilah DC-link yang membantu memperhalus kualitas tegangan DC hasil konversi.
Bagian inverter sendiri terdiri dari kumpulan divais penyaklaran seperti: thyristor, transistor bipolar, MOSFET, atau IGBT. Gambar 2.2 rangkaian variabel inverter tegangan menunjukkan inverter yang menggunakan transistor bipolar. Pengatur logika, biasanya dalam bentuk kartu elektronik, yang memiliki komponen utama sebuah mikroprosesor akan mengatur kapan waktu transistor-transistor inverter hidup atau mati untuk menghasilkan tegangan dan frekuensi yang bervariasi untuk dilanjutkan ke motor sesuai bebannya.
Gambar 2.2. Rangkaian variabel inverter tegangan
Tipe inverter ini menggunakan enam langkah untuk menyelesaikan satu putaran 360°(6 langkah masing-masing 60°). Oleh karena hanya enam langkah, inverter jenis ini memiliki kekurangan yaitu torsi yang pulsatif (peningkatan/ penurunan nilai yang mendadak) setiap penyaklaran terjadi seperti pada Gambar 2.3.
Ini dapat ditemui pada operasi kecepatan rendah seiring variasi putaran motor. Istilah teknis dari putaran yang bervariasi ini adalah cogging. Selain itu, bentuk gelombang sinyal keluaran yang tidak sinusoidal sempurna mengakibatkan pemanasan berlebih di motor mestipun motor dijalankan di bawah nilai rating-nya.
Gambar 2.3. Gelombang dari Variable Voltage Inverter (VVI)
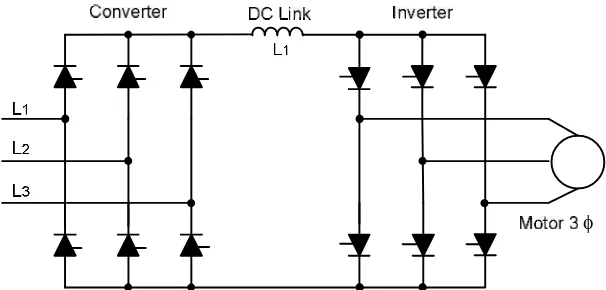
2. Current source inverter (CSI)
Jenis inverter satu ini menggunakan SCR untuk menghasilkan tegangan DC-link yang bervariasi untuk suplai ke bagian inverter yang juga terdiri dari SCR untuk menyaklarkan keluaran ke motor seperti pada Gambar 2.4. Beda dengan VVI yang mengontrol tegangan, CSI justru mengontrol arus yang akan disuplai ke motor. Karena inilah pemilihan motor haruslah hati-hati agar cocok dengan drive. Percikan arus akibat proses penyaklaran dapat dilihat pada keluaran jika kita mengukurnya menggunakan oscilloscope seperti pada Gambar 2.5. Pada kecepatan rendah sifat arus yang pulsatif dapat mengakibatkan motor tersendat ‘cog‘.
Tegangan
Gambar 2.4. Skema sumber inverter arus
Gambar 2.5. Gelombang output sumber inverter arus
3. Pulse width modulation
Teknik penyaklaran satu ini memberikan output yang lebih sinusoidal dibandingkan dua jenis inverter sebelumnya. Drive yang menggunakan PWM terbukti lebih efisien dan memberikan tingkat performa yang lebih tinggi. Sama seperti VVI, sebuah PWM juga terdiri atas rangkaian konverter, DC link, control logic, dan sebuah inverter . Biasanya konverter yang digunakan adalah tipe tidak terkontrol (dioda biasa) namun juga ada yang menggunakan setengah terkontrol atau kontrol penuh [18].
Tegangan
Arus
Penyearah dioda dan penyearah thyristor yang dikendalikan sudut fasanya masih banyak digunakan dalam aplikasi tertentu karena faktor kesederhanaan dan biaya yang rendah, tetapi penyearah jenis ini akan mengurangi kualitas daya pada sisi AC masukan yang disebabkan adanya kandungan harmonisa yang masih besar serta faktor daya yang relatif rendah. Teknik modulasi lebar pulsa (PWM = Pulse Width Modulation) banyak diterapkan pada aplikasi penyearah [19]. Konverter AC-DC yang menggunakan penyearah PWM beroperasi dengan menjaga frekuensi konstan dan waktu divariasikan, dengan demikian lebar pulsa bervariasi [20]. PWM akan menarik arus dari sumber hampir mendekati bentuk gelombang sinusoidal. PWM tipe kontrol yang sangat baik digunakan utnuk me
ningkatkan faktor kerja penyearah dan mengurangi harmonisa arus masukan, karena tipe kontrol PWM dapat dinyalakan dan dimatikan beberapa kali setiap setengah siklus, sehingga dapat meredam harmonisa yang timbul pada arus masukan.
Gambar 2.6. Penyearah PWM satu fasa full bridge. (a) Rangkaian penyearah PWM, rangkaian ekivalen dengan (b) T1 dan T4 On, (c) T2 dan T3On, (d) T1 dan T3 atau T2 dan T4 On [21]
Penyearah ini bekerja dengan cara:
1. Apabila T1 dan T4 dalam keadaan on maka T2 dan T3 dalam keadaan off , VAFE = Vo (Gambar 2.6(b))
2. Apabila T1 dan T4 dalam keadaan off, maka T2dan T3 dalam keadaan on, VAFE = -Vo (Gambar 2.6(c))
3. Apabila T1 dan T3 dalam keadaan on, T2 dan T4 dalam keadaan off, atau T1 dan T3 dalam keadaan off , T2 dan T4 dalam keadaan on, VAFE = 0 (Gambar 2.6(d))
Salah satu cara yang bisa dilakukan pada switching transistor seperti pada Gambar 2.7 yang paling bawah, ini menggambarkan dua keadaan alternatif, yang pertama, arus mengalir ke beban (T1 dan T4 berkonduksi) dan kedua, penyearah input di short circuit (D1 dan T3 berkonduksi). Area hitam menggambarkan konduksi transistor, area putih menggambarkan elemen pasif berkonduksi. transistor di turnoff dan arus mengalir melalui dioda.
Gambar 2.7. Bentuk gelombang tegangan dan arus pada penyearah PWM [22]
Tegangan keluaran dan parameter dari penyearah PWM dapat dihitung dengan dua langkah yaitu :
1. Dengan hanya mempertimbangkan satu pasang pulsa, sehingga jika satu pulsa mulai dari t = 1 dan berakhir saat t = 1+ 1, pulsa lain mulai saat t = + 1 dan berakhir saat t = (+1+ 1) dan
2. Dengan menggabungkan efek semua pulsa. Jika pulsa mth mulai dari t = m, dimana lebar pulsa adalah m, nilai rata-rata tegangan keluaran bergantung pada jumlah pulsa p, yang didapatkan dari
= ∑ ∫ sin ( )
= ∑ [cos − cos( + )] ... (2.8)
Jika arus beban dengan nilai rata-rata Ia selalu kontinyu dan ripple diabaikan, arus input sesaat dapat diekspresikan dalam deret Fourier seperti berikut ini.
( ) = + ∑ , ,…( cos + sin ) ... (2.9)
Karena bentuk gelombang arus input simetris, disana tidak terdapat harmonisa genap dan A0 akan menjadi nol dan koefisien dari Persamaan 2.9 adalah :
= 1 ( ) cos ( )
= 2 cos ( ) − 2 / cos ( )
= 1 ( ) sin ( )
= 2 sin ( ) − 2 / sin ( )
/
= ∑ sin sin + − sin + + ...(2.10)
untuk n= 1, 3, 5, … Persamaan (2.9) dapat ditulis kembali menjadi Persamaan (2.11) :
( ) = ∑ , ,…√2 sin( +
f
) ...(2.11)Dimana:
f
n = tan-1 (An/Bn) = 0 dan = ( + ) /√2 = /√22.3. Harmonisa
2.4. Perhitungan Harmonisa
Untuk menentukan besar Total Harmonic Distortion (THD) dari perumusan analisa deret Fourier untuk tegangan dan arus dalam fungsi waktu yaitu [24]:
v(t) = Vo + ∑ ( + ) ... …...(2.12) ( ) = Vo + ∑∞ ( + ) ... (2.13) Tegangan dan arus RMS dari gelombang sinusoidal yaitu nilai puncak gelombang
dibagi √2 dan secara deret Fourier untuk tegangan dan arus yaitu [25]:
V = V + ∑∞ √ ... ..(2.14)
I = I + ∑ √ ...(2.15)
Pada umumnya untuk mengukur besar harmonisa yang disebut dengan Total Harmonic Distortion (THD). Untuk THD tegangan dan arus didefenisikan sebagai nilai RMS harmonisa urutan diatas frekuensi fundamental dibagi dengan nilai RMS pada frekuensi fundamentalnya, dan tegangan DC nya diabaikan.
Besar Total Harmonic Distortion (THD) untuk tegangan dan arus ditunjukan pada persamaan (2.16) dan (2.17) yaitu :
= ∑ √
Hubungan Persamaan THD dengan arus RMS dari Persamaan (2.17) yaitu:
Selanjutnya di dapat Persamaan (2.18) yaitu:
= , 1 + ... (2.18)
Sehingga arus RMS terhadap THDI yaitu:
= , 1 + ...(2.19)
Individual Harmonic Distortion (IHD) adalah perbandingan nilai RMS pada orde harmonisa terdistorsi terhadap nilai RMS pada frekuensi fundamental yaitu :
= √
Dimana: Vh = Tegangan harmonisa pada orde terdistorsi
Ih = Arus harmonisa pada orde terdistorsi
Hubungan Persamaan IHD dengan arus RMS dari Persamaan (2.21) yaitu:
= ...(2.22)
= = ...(223)
Selanjutnya dari Persamaan (2.22) di dapat yaitu:
= + . = 1 + ...(2.24)
= 1 + ...(2.25)
Sehingga arus RMS terhadap IHDi yaitu:
= 1 + ...(2.26)
2.5. Batasan Harmonisa
harmonisa adalah yang dikeluarkan oleh International Electrotechnical Commission (IEC) yang mengatur batasan harmonisa pada beban beban kecil satu fasa ataupun tiga fasa. Untuk beban tersebut umumnya digunakan standar IEC61000-3-2.
Pada standar IEC61000-3-2, beban beban kecil tersebut diklasifikasikan dalam kelas A, B, C, dan D, dimana masing-masing kelas mempunyai batasan harmonisa yang berbeda beda yang dijelaskan sebagai berikut [4],[5].
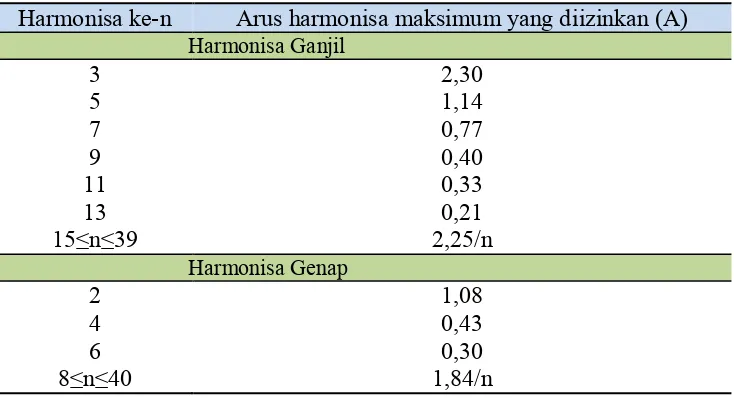
1). Kelas A
Kelas ini merupakan semua kategori beban termasuk didalamnya peralatan penggerak motor dan semua peralatan 3 fasa yang arusnya tidak lebih dari 16 amper perfasanya. Semua peralatan yang tidak termasuk dalam 3 kelas yang lain dimasukkan dalam kategori kelas A. Batasan harmonisanya hanya didefinisikan untuk peralatan satu fasa (tegangan kerja 230 V) dan tiga fasa (230/400 V) dimana batasan arus harmonisanya seperti yang diperlihatkan Tabel 2.1.
Tabel 2.1. Batasan arus harmonisa untuk peralatan kelas A Harmonisa ke-n Arus harmonisa maksimum yang diizinkan (A)
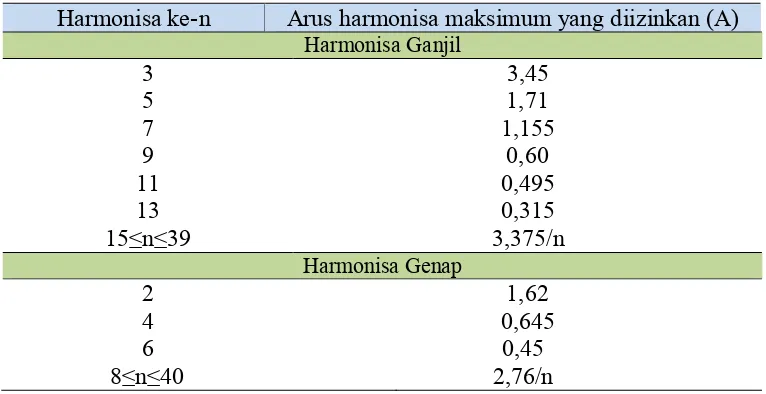
2). Kelas B
Kelas ini meliputi semua peralatan tool portable yang batasan arus harmonisanya merupakan harga absolut maksimum dengan waktu kerja yang singkat. Batasan arus harmonisanya diperlihatkan pada Tabel 2.2.
Tabel 2.2. Batasan arus harmonisa untuk peralatan kelas B
Harmonisa ke-n Arus harmonisa maksimum yang diizinkan (A)
Harmonisa Ganjil
Tabel 2.3. Batasan arus harmonisa untuk peralatan kelas C
Harmonisa ke-n Arus harmonisa maksimum yang diizinkan (% fundamental)
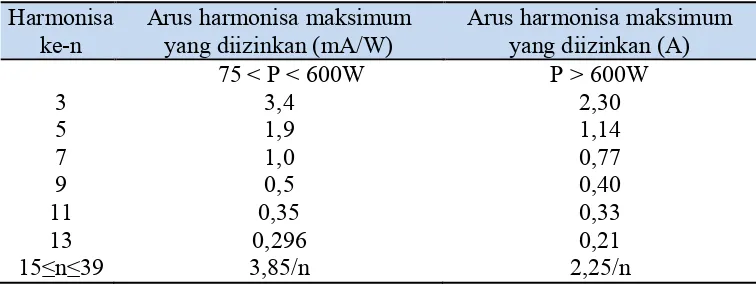
dianggap memiliki dampak terbesar pada jaringan listrik. Ini khususnya
personal komputer, layar monitor dan penerima TV. Batasan arusnya diekspresikan
dalam bentuk mA/W untuk peralatan dengan daya pengenal melebihi 75 W tapi
kurang dari 600 W atau dalam ampere untuk peralatan yang lebih besar
dari 600 W. Batasan arus harmonisanya diperlihatkan pada oleh Tabel 2.4.
Tabel 2.4. Batasan arus harmonisa untuk peralatan kelas D
Harmonisa
2.6. Filter Harmonisa
Tujuan utama dari filter harmonisa adalah untuk mengurangi amplitudo satu frekuensi tertentu dari sebuah tegangan atau arus. Penambahan filter harmonisa pada suatu sistem tenaga listrik yang mengandung sumber-sumber harmonisa, maka penyebaran arus harmonisa keseluruh jaringan dapat ditekan sekecil mungkin. Selain itu filter harmonisa pada frekuensi fundamental dapat mengkompensasi daya reaktif dan dipergunakan untuk memperbaiki faktor daya sistem [26].
2.6.1. Filter pasif
Filter pasif merupakan metode penyelesaian yang efektif dan ekonomis untuk masalah harmonisa, rangkaian filter pasif seperti Gambar 2.9. Filter pasif sebagian besar didesain untuk memberikan bagian khusus untuk mengalihkan arus haromonisa yang tidak diinginkan dalam sistem tenaga. Filter pasif banyak digunakan untuk mengkompensasi kerugian daya reaktif akibat adanya harmonisa pada sistem instalasi.
Beberapa jenis filter pasif yang umum beserta konfigurasi dan impedansinya seperti pada Gambar 2.10 [27]. Passive single-tuned filter atau band-pass filter adalah yang paling umum digunakan. Dua buah passive single-tuned filter akan memiliki karakteristik yang mirip dengan double band-pass filter. Tipe filter pasif yang paling umum digunakan adalah single-tuned filter. Filter umum ini biasa digunakan pada tegangan rendah. Rangkaian filter ini mempunyai impedansi yang rendah. Sebelum merancang suatu filter pasif, maka perlu diketahui besarnya kebutuhan daya reaktif pada sistem. Daya reaktif sistem ini diperlukan untuk menghitung besarnya nilai kapasitor yang diperlukan untuk memperbaiki sistem tersebut [9].
Gambar 2.10. Jenis-jenis filter pasif [9]
2.6.2. Passive LC filter
Rangkain passive LC filter untuk inverter tiga fasa seperti Gambar 2.11.
Gambar 2.11. Rangkaian passive LC filter untuk inverter tiga fasa [10]. Meminimalkan daya reaktif sebuah kriteria tambahan yang diperlukan untuk menentukan induktansi dan kapasitansi dari passive LC filter . Pada penelitian ini daya reaktif digunakan sebagai tambahan meskipun kriterianya berdasarkan biaya minimum, ukuran, kerugian, dan lain-lain. Ukuran minimalisasi, kerugian dan biaya filter, kriteria tambahan berdasarkan daya reaktif minimum juga termasuk digunakan [28]. Namun, sebagai passive LC filter pada harmonik diberikan dalam bentuk Fourier seri ekspresi dari induktansi dan kapasitansi dari passive LC filter yang tidak diperoleh [6].
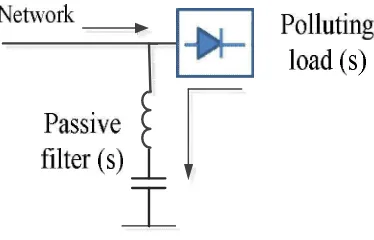
2.6.3. Prinsip pereduksian harmonisa dari passive LC filter
pada peralatan ini dapat memperbaiki cos sistem, pada reaktornya berfungsi sebagai filter dan juga melindungi kapasitor dari over kapasitor hal ini dikarenakan adanya resonansi. Sebuah rangkaian LC dipasang pada frekuensi harmonisa sebagai filter, pemasangannya secara paralel dengan peralatan yang menyebabkan distorsi harmonisa seperti Gambar 2.12 [9].
Gambar 2.12. Pemodelan passive LC filter [9]
2.6.4. Merancang passive LC filter
Rangkaian impedansi passive LC filter seperti Gambar 2.13.
Passive LC filter terdiri dari hubungan paralel komponen-komponen pasif yaitu Induktor dan kapasitor. Dalam mendesain passive LC filter terlebih dahulu menentukan besar kapasitor sesuai kebutuhan faktor daya dan induktor filter. Langkah-langkah yang harus dilakukan dalam merancang passive LC filter adalah sebagai berikut [29],[30] :
A. Menghitung nilai kapasitor ( C )
1) Tentukan ukuran kapasitas kapasitor Qc berdasarkan kebutuhan daya reaktif untuk perbaikan faktor daya. Daya reaktif kapasitor ( Qc ) adalah :
QC = P {tan(cos-1pf1) – tan (cos-1 pf2)} Dimana :
P : daya aktif (kW).
pf1 : faktor daya mula-mula sebelum diperbaiki. pf2 : faktor daya setelah diperbaiki.
3) Tentukan kapasitas dari kapasitor ( C )
=
...(2.28)Dimana :
C : kapasitansi kapasitor (Farad) f0 : frekuensi fundamental (Hz).
B. Menghitung nilai induktor ( L )
1) Tentukan nilai impedansi Z induktor [29]:
= ...(2.29)
2) Tentukan Reaktansi Induktif dari Induktor [29,30]:
= ...(2.30)
3) Tentukan reaktansi karakteristik dari filter pada orde tuning:
= ℎ ...(2.31) 4) Tentukan Tahanan (R) dari Induktor [29,30]:
= ...(2.32)
5) Tentukan induktansi dari induktor didapat [30]:
= + ( )
= + ( )
di mana = 2 , maka nilai induktansi dari indutor (L) [30]:
=√ ...(2.33)
Di mana:
Vs : daya pada input VSD (Volt) Z : impedansi sistem (Ω)
I : arus yang mengalir pada VSD (A) L : induktansi (H)
Dari Gambar 2-13 dapat dicari impedansi rangkain dengan persamaan:
=
...………..…….. (2.34)
2.6.5. Passive single tuned filter
Gambar 2.14. Passive single tuned filter [12]
Berdasarkan Gambar 2.14, besarnya impedansi passive single tuned filter pada frekuensi fundamental adalah [5]:
= + ( − ) ...(2.35)
Pada frekuensi resonansi , Persamaan (2.34) menjadi:
= + − ...(2.36)
Jika frekuensi sudut saat resonansi adalah:
= 2 ℎ ...(2.37) Impedansi filter dapat ditulis sebagai berikut:
= + 2 ℎ − ...(2.38) = + ( ℎ − ) ...(2.39)
Saat resonansi terjadi nilai reaktansi induktif dan reaktansi kapasitif sama besar, maka diperoleh impedansi passive single tuned filter seperti pada Persamaan (2.40) adalah
Pada Persamaan (2.40) menunjukkan bahwa pada frekuensi resonansi, impedansi passive single-tuned filter akan mempunyai impedansi yang sangat kecil, lebih kecil dari impedansi beban yaitu sama dengan tahanan induktor R, sehingga arus harmonisa yang mempunyai frekuensi yang sama dengan frekuensi resonansi akan dialirkan atau dibelokkan melalui passive single-tuned filter dan tidak mengalir ke sistem. Frekuensi respon dan sudut fasa dari passive single-tuned filter ditunjukkan seperti Gambar 2.15 (a) dan (b), dimana dapat dilihat bahwa pada frekuensi harmonisa atau orde ke-5 dari harmonisa (fr = 250 Hz), impedansi passive single-tuned filter sangat kecil.
(a) Frekuansi respon passive single tuned filter
(b) Sudut fasa fungsi orde harmonisa
Dengan demikian Passive single tuned filter diharapkan dapat mengurangi IHD tegangan dan IHD arus sampai dengan 10-30%. Besarnya tahanan R dari induktor dapat ditetukan oleh faktor kualitas dari induktor. Faktor kualitas (Q) adalah kualitas listrik suatu induktor, secara matematis Q adalah perbandingan nilai reaktansi induktif atau reaktansi kapasitif pada frekuensi resonansi dengan tahanan R. Semakin besar nilai Q yang dipilih maka semakin kecil nilai R dan semakin bagus kualitas dari filter dimana energi yang dikonsumsi oleh filter akan semakin kecil, artinya rugi-rugi panas filter adalah kecil [29].
Pada frekuensi tuning:
= 1 = ...(2.41) Faktor kualitas:
= ...(2.42) Berdasarkan persamaan (2.17), tahanan resistor adalah:
= ...(2.43)
2.6.6. Prinsip pereduksian harmonisa dari passive single-tuned filter
Filter-filter ini dihubungkan pada busbar dimana pengurangan tegangan harmonik ditentukan bersama-sama, filter-filter ini membentuk filter bank .
Ada dua parameter yang perlu dipertimbangkan dalam menentukan nilai R, L, dan C, yaitu:
1. Faktor kualitas (Quality factor, Q)
2. Penyimpangan frekuensi relative (Relative Frequency Deviation, δ) Kualitas dari sebuah filter (Q) adalah ukuran ketajaman penyetelan filter tersebut dalam mengeliminasi harmonisa. Filter dengan Q tinggi disetel pada frekuensi rendah (misalnya harmonisa kelima), dan nilainya biasanya terletak antara 30 dan 100. Dalam single-tuned filter, faktor kualitas Q didefinisikan sebagai perbandingan antara induktansi atau kapasitansi pada frekuensi resonansi terhadap resistansi. Perkiraan nilai Q untuk reaktor inti udara (air core reactors) adalah 75 dan lebih besar 75 untuk reaktor inti besi (iron-core reactors) [21].
rangkaian passive single tuned filter dipasang pada frekuensi harmonisa sebagai filter, seperti pada Gambar 2.16
Gambar 2.16. Pemodelan passive single tuned filter [31]
Gambar 2.17. Kompensasi gelombang filter
2.6.7. Merancang passive single tuned filter
Mendesain passive single tuned filter yang terdiri dari hubungan seri komponen-komponen pasif induktor, kapasitor dan tahanan seperti Gambar 2.18, adalah bagaimana menentukan besarnya komponen-komponen dari filter tersebut [13], [14],[29].
Gambar 2.18. Rangkaian resonansi seri
Gelombang yang sudah diperbaiki
Gelombang arus terdistorsi
Langkah-langkah rancangan passive single tuned filter adalah :
a. Tentukan ukuran kapasitas kapasitor Qc berdasarkan kebutuhan daya reaktif untuk perbaikan faktor daya dengan Persamaan (2.44). Daya reaktif kapasitor adalah :
= {tan −1
1 − tan −1 2 ... (2.44)
Dimana :
P : beban (kW)
pf1 : faktor daya mula-mula sebelum diperbaiki
pf2 : faktor daya setelah diperbaiki
b. Tentukan reaktansi kapasitor dengan Persamaan (2.45) :
= ...(2.45)
c. Tentukan kapasitansi dari kapasitor dengan Persamaan (2.46) :
C =
...(2.46)d. Tentukan reaktansi induktif dari induktor dengan Persaman (2.47) :
X = ...(2.47)
e. Tentukan induktansi dari induktor dengan Persamaan (2.48) :
f. Tentukan reaktansi karakteristik dari filter pada orde tuning dengan Persamaan (2.49) :
= ℎ ...(2.49)
g. Tentukan tahanan (R) dari Induktor dengan Persamaan (2.50) :
= ...(2.50) Untuk menentukan kebutuhan daya reaktif dapat digambarkan dalam bentuk segitiga daya seperti Gambar 2.19.
Gambar 2.19. Segitiga daya untuk menentukan kebutuhan daya reaktif Q [30]
Kebutuhan daya reaktif dapat dihitung dengan pemasangan kapasitor untuk memperbaiki faktor daya beban. Komponen daya aktif (P) umumnya konstan, daya semu (S) dan daya reaktif (Q) berubah sesuai dengan faktor daya beban.
Daya Reaktif (Q) = Daya Aktif (P)× tan φ
Dengan merujuk segitiga daya Gambar 2.19, maka : Daya reaktif pada pf awal yaitu :
Daya reaktif pada pf diperbaiki yaitu :
= ... ……..(2.52) Sehingga rating kapasitor yang diperlukan untuk memperbaiki faktor daya yaitu: Daya reaktif ΔQ= Q1 - Q2
Atau

![Gambar 2.6. Penyearah PWM satu fasa full bridge. (a) Rangkaian penyearah PWM, rangkaian ekivalen dengan (b) T1 dan T4 On, (c) T2 dan T3On, (d) T1 dan T3 atau T2 dan T4 On [21]](https://thumb-ap.123doks.com/thumbv2/123dok/1862698.1165549/11.612.151.502.113.342/gambar-penyearah-bridge-rangkaian-penyearah-rangkaian-ekivalen-dengan.webp)
![Gambar 2.7. Bentuk gelombang tegangan dan arus pada penyearah PWM [22]](https://thumb-ap.123doks.com/thumbv2/123dok/1862698.1165549/12.612.176.471.292.651/gambar-bentuk-gelombang-tegangan-arus-pada-penyearah-pwm.webp)