BAB II
MOTOR INDUKSI TIGA FASA
2.1 Umum
Motor induksi merupakan motor arus bolak – balik (AC) yang paling luas digunakan dan dapat dijumpai dalam setiap aplikasi industri maupun rumah tangga. Penamaannya berasal dari kenyataan bahwa arus rotor motor ini bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar (rotating magnetic field) yang dihasilkan arus stator.
Motor ini memiliki konstruksi yang kuat, sederhana, handal, serta berbiaya murah. Di samping itu motor ini juga memiliki effisiensi yang tinggi saat berbeban penuh dan tidak membutuhkan perawatan yang banyak. Akan tetapi jika dibandingkan dengan motor DC, motor induksi masih memiliki kelemahan dalam hal pengaturan kecepatan. Dimana pada motor induksi pengaturan kecepatan sangat sukar untuk dilakukan, sementara pada motor DC hal yang sama tidak dijumpai.
2.2 Konstruksi Motor Induksi Tiga Fasa
yang jaraknya sangat kecil. Konstruksi motor induksi dapat diperlihatkan pada Gambar 2.1
(a)
(b)
(c)
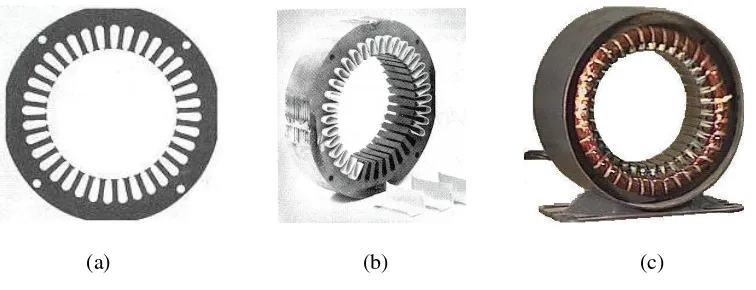
Komponen stator adalah bagian terluar dari motor yang merupakan bagian yang diam dan mengalirkan arus fasa. Stator terdiri atas tumpukan laminasi inti yang memiliki alur yang menjadi tempat kumparan dililitkan yang berbentuk silindris. Alur pada tumpukan laminasi inti diisolasi dengan kertas (Gambar 2.2 (b)). tiap elemen laminasi inti dibentuk dari lembaran besi (Gambar 2.2 (a)). Tiap lembaran besi tersebut memiliki beberapa alur dan beberapa lubang pengikat untuk menyatukan inti. Tiap kumparan tersebar dalam alur yang disebut belitan fasa dimana untuk motor tiga fasa, belitan tersebut terpisah secara listrik sebesar 120o. Kawat kumparan yang digunakan terbuat dari tembaga yang dilapis dengan isolasi tipis. Kemudian tumpukan inti dan belitan stator diletakkan dalam cangkang silindris (Gambar 2.2 (c)). Berikut ini contoh lempengan laminasi inti, lempengan inti yang telah disatukan, belitan stator yang telah dilekatkan pada cangkang luar untuk motor induksi tiga fasa.
(a) (b) (c)
Gambar 2.2 Menggambarkan Komponen Stator motor induksi tiga fasa, (a) Lempengan Inti
Untuk rotor akan dibahas pada bagian berikutnya, yaitu jenis – jenis motor induksi tiga fasa berdasarka jenis rotornya.
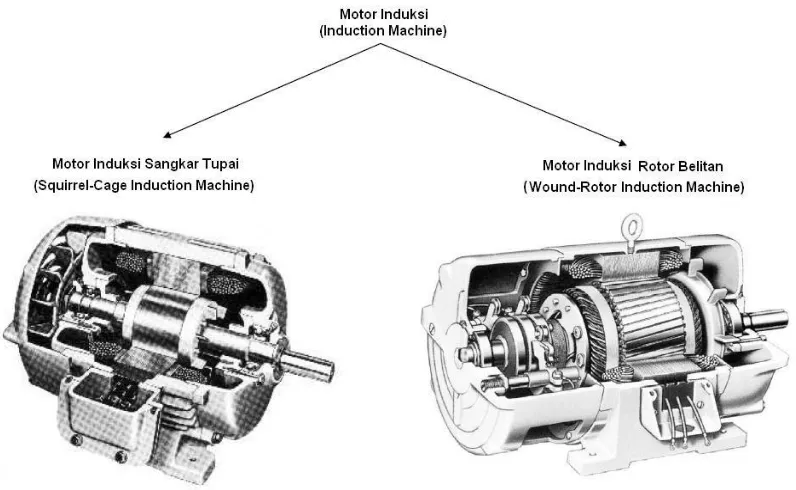
2.3 Jenis Motor Induksi Tiga Fasa
Ada dua jenis motor induksi tiga fasa berdasarkan rotornya yaitu: 1. Motor induksi tiga fasa sangkar tupai (squirrel-cage motor)
2. Motor induksi tiga fasa rotor belitan (wound-rotor motor)
Gambar 2.3 Pembagian motor induksi tiga fasa berdasarkan rotornya kedua motor ini bekerja pada prinsip yang sama dan mempunyai konstruksi stator yang sama tetapi berbeda dalam konstruksi rotor.
2.3.1 Motor Induksi Tiga Fasa Sangkar Tupai (Squirrel-cage Motor)
beralur yang didukung dalam rangka stator yang terbuat dari besi tuang atau pelat baja yang dipabrikasi. Lilitan – lilitan kumparan stator diletakkan dalam alur stator yang terpisah 120 derajat listrik. Lilitan fasa ini dapat tersambung dalam hubungan delta (Δ) ataupun bintang (Υ). Rotor jenis rotor sangkar ditunjukkan pada Gambar 2.4 di bawah ini.
(a)
(b)
Gambar 2.4 Rotor sangkar, (a) Tipikal Rotor Sangkar, (b) Bagian-bagian Rotor Sangkar
rotor dan kemudian dilas dengan kuat ke cincin ujung. Batang rotor motor sangkar tupai tidak selalu ditempatkan paralel terhadap poros motor tetapi kerapkali dimiringkan. Hal ini akan menghasilkan torsi yang lebih seragam dan juga mengurangi derau dengung magnetik sewaktu motor sedang berputar. Pada ujung cincin penutup dilekatkan sirip yang berfungsi sebagai pendingin.
2.3.2 Motor Induksi Tiga Fasa Rotor Belitan (wound-rotor motor)
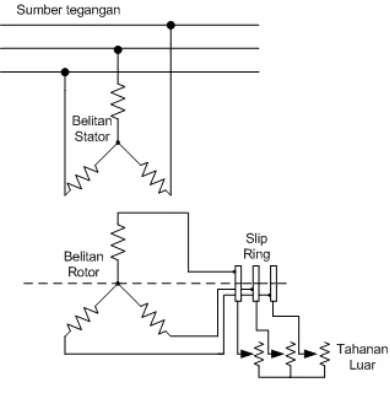
Motor rotor belitan (motor cincin slip) berbeda dengan motor sangkar tupai dalam hal konstruksi rotornya. Seperti namanya, rotor dililit dengan lilitan terisolasi serupa dengan lilitan stator. Lilitan fasa rotor dihubungkan secara Υ dan
masing – masing fasa ujung terbuka yang dikeluarkan ke cincin slip yang terpasang pada poros rotor. Secara skematik dapat dilihat pada Gambar 2.5. Dari Gambar 2.5 ini dapat dilihat bahwa cincin slip dan sikat semata – mata merupakan penghubung tahanan kendali variabel luar ke dalam rangkaian rotor.
Pada motor ini, cincin slip yang terhubung ke sebuah tahanan variabel eksternal yang berfungsi membatasi arus pengasutan dan yang bertanggung jawab terhadap pemanasan rotor. Selama pengasutan, penambahan tahanan eksternal pada rangkaian rotor belitan menghasilkan torsi pengasutan yang lebih besar dengan arus pengasutan yang lebih kecil dibanding dengan rotor sangkar. Konstruksi motor tiga fasa rotor belitan ditunjukkan pada Gambar 2.6 di bawah ini.
Gambar 2.6 Rotor Belitan
2.4 Medan Putar
F
F
F F
F
F
F
Gambar 2.7 Medan Putar
Pada posisi T1, arus pada fasa C berada pada harga positif maksimumnya. Pada saat yang sama, arus pada fasa A dan B berada pada separuh harga negatif maksimumnya. Medan magnet yang dihasilkan terbentuk secara vertical dengan arah ke bawah, dengan kekuatan medan maksimum terjadi sepanjang fasa C, antara kutub C (utara) dengan C’ (selatan). Medan magnet ini dibantu oleh
menjadi kutub-kutub selatan. Pada posisi T2, gelombang sinus arus telah berotasi sebanyak 60 derajat listrik. Pada posisi ini, arus dalam fasa A telah naik hingga harga negatif maksimumnya. Arus pada fasa B mempunya arah yang berlawanan dan berada pada separuh harga maksimum positifnya. Begitu pula arus pada fasa C telah turun hingga separuh dari harga maksimum positifnya. Medan magnet yang dihasilkan terbentuk ke kiri arah bawah, dengan kekuatan medan maksimum sepanjang fasa A, antara kutub-kutub A’ (utara) dan A (selatan). Medan magnet ini dibantu oleh medan-medan yang lebih lemah yang timbul sepanjang fasa B dan C, dengan kutub-kutub B dan C menjadi kutub-kutub utara dan kutub-kutub B’ dan C’ menjadi kutub-kutub selatan. Di sini terlihat bahwa medan magnet pada stator motor secara fisik telah berputar sebanyak 60o. Pada posisi T3, gelombang sinus arus berputar lagi 60 derajat listrik dari posisi sebelumnya hingga total rotasi pada posisi ini sebesar 120 derajat listrik. Pada posisi ini, arus dalam fasa B telah naik hingga mencapai harga positif maksimumnya. Arus pada fasa A telah turun hingga separuh dari harga negatif maksimumnya, sementara arus pada fasa C telah berbalik arah dan berada pada separuh harga negatif maksimumnya pula. Medan magnet yang dihasilkan mengarah ke atas kiri, dengan kekuatan medan maksimum sepanjang fasa B, antara kutub B (utara) dan B’ (selatan). Medan
bahwa polaritasnya telah berbalik. Karena fasa C kembali pada harga maksimum, medan magnet yang dihasilkan sepanjang fasa C kembali berada pada harga maksimum, medan magnet yang dihasilkan sepanjang fasa C akan memiliki kekuatan medan maksimum. Meskipun demikian, dengan arus yang mengalir dalam arah yang berlawanan pada fasa C, medan magnet yang timbul mempunyai arah ke atas antara kutub C’ (utara) dan C (selatan). Terlihat bahwa medan magnet sekarang telah berotasi secara fisik sebanyak 1800 dari posisi awalnya. Pada posisi T5, fasa A berada pada harga positif maksimumnya, yang menghasilkan medan magnet ke arah atas sebelah kanan. Kembali, medan magnet secara fisik telah berputar 600 dari titik sebelumnya sehingga total rotasi sebanyak 2400. Pada titik T6, fasa B berada pada harga maksimum negatif yang menghasilkan medan magnet ke arah bawah sebelah kanan. Medan magnet pun telah berotasi sebesar 600 dari titik T5 sehingga total rotas adalah 3000. Akhirnya, pada titik T7, arus kembali ke polaritas dan nilai yang sama seperti pada Posisi T1. Karenanya, medan magnet yang dihasilkan pada posisi ini akan identik dengan pada posisi T1. Dari pembahasan ini, terlihat bahwa untuk satu putaran penuh gelombang sinus listrik (3600), medan magnet yang timbul pada stator sebuah motor juga berotasi satu putaran penuh (3600). Sehingga, dengan menerapkan tiga-fasa AC kepada tiga belitan yang terpisah secara simetris sekitar stator, medan putar (rotating magnetic field) juga timbul.
2.5 Slip
tidak akan ada ggl yang diinduksikan dalam rotor, tidak ada arus yang mengalir pada rotor, dan karenanya tidak akan menghasilkan kopel. Kecepatan rotor sekalipun tanpa beban, harus lebih kecil sedikit dari kecepatan sinkron agar adanya tegangan induksi pada rotor, dan akan menghasilkan arus di rotor, arus induksi ini akan berinteraksi dengan fluks listrik sehingga menghasilkan kopel. Selisih antara kecepatan rotor dengan kecepatan sinkron disebut slip (s). Slip dapat dinyatakan dalam putaran setiap menit, tetapi lebih umum dinyatakan sebagai persen dari kecepatan sinkron.
Slip (s) = 100% s
r s
n n n
…...……. (2.1)
dimana: nr kecepatan rotor (RPM)
Persamaan (2.1) memberikan informasi yaitu:
1. Saat s = 1 dimana
n
r= 0, ini berati rotor masih dalam keadaan diam atauakan berputar.
2. s = 0 menyatakan bahwa ns= nr, ini berarti rotor berputar sampai kecepatan sinkron. Hal ini dapat terjadi jika ada arus dc yang diinjeksikan ke belitan rotor, atau rotor digerakkan secara mekanik.
2.6 Prinsip Kerja Motor Induksi Tiga Fasa
Secara umum prinsip kerja motor induksi dapat dijabarkan dalam langkah – langkah berikut:
1. Pada keadaan beban nol Ketiga fasa stator yang dihubungkan dengan sumber tiga fasa yang setimbang menghasilkan arus pada tiap belitan fasa.
2. Arus pada tiap fasa menghasilkan fluksi bolak-balik yang berubah-ubah. 3. Amplitudo fluksi yang dihasilkan berubah secara sinusoidal dan arahnya tegak
lurus terhadap belitan fasa.
4. Akibat fluksi yang berputar timbul ggl pada stator motor yang besarnya adalah e1 =
dt d
N
1 ( Volt )
atau E1 4,44fN1 ( Volt )...(2.2) 5. Penjumlahan ketiga fluksi bolak-balik tersebut disebut medan putar yang berputar dengan kecepatan sinkron ns, besarnya nilai ns ditentukan oleh jumlah
kutub p dan frekuensi stator f yang dirumuskan dengan
p f
ns 120 ( rpm )
6. Fluksi yang berputar tersebut akan memotong batang konduktor pada rotor. Akibatnya pada kumparan rotor timbul tegangan induksi (ggl) sebesar E2 yang besarnya
E2 4,44fN2m ( Volt ) dimana:
E2 = Tegangan induksi pada rotor saat rotor dalam keadaan diam (Volt) N2 = Jumlah lilitan kumparan rotor
7. Karena kumparan rotor merupakan rangkaian tertutup, maka ggl tersebut akan menghasilkan arus I2
8. Adanya arus I2 di dalam medan magnet akan menimbulkan gaya F pada rotor 9. Bila kopel mula yang dihasilkan oleh gaya F cukup besar untuk memikul
kopel beban, rotor akan berputar searah medan putar stator
10.Perputaran rotor akan semakin meningkat hingga mendekati kecepatan sinkron. Perbedaan kecepatan medan stator (ns) dan kecepatan rotor (nr) disebut slip (s) dan dinyatakan dengan
100% s
r s
n n n s
11.Pada saat rotor dalam keadaan berputar, besarnya tegangan yang terinduksi pada kumparan rotor akan bervariasi tergantung besarnya slip. Tegangan induksi ini dinyatakan dengan E2s yang besarnya
E2s 4,44sfN2m ( Volt ) dimana:
E2s = tegangan induksi pada rotor dalam keadaan berputar (Volt)
f2 = s.f = frekuensi rotor (frekuensi tegangan induksi pada rotor dalam keadaan berputar)
12.Bila ns = nr, tegangan tidak akan terinduksi dan arus tidak akan mengalir pada kumparan rotor, karenanya tidak dihasilkan kopel. Kopel ditimbulkan jika nr < ns
2.7 Frekuensi Rotor
frekuensi rotor akan bergantung kepada kecepatan relatif atau bergantung terhadap besarnya slip. Untuk besar slip tertentu, maka frekuensi rotor sebesar f '
yaitu,
Dengan membagikan ns dengan Persamaan (2.3), maka didapatkan :
s
Telah diketahui bahwa arus rotor bergantung terhadap frekuensi rotor f '=
sf dan ketika arus ini mengalir pada masing – masing fasa di belitan rotor, akan memberikan reaksi medan magnet. Biasanya medan magnet pada rotor akan menghasilkan medan magnet yang berputar yang besarnya bergantung atau relatif terhadap putaran rotor sebesarsns.
2.8 Rangkaian Ekivalen Motor Induksi
Untuk mempermudah analisis motor induksi, digunakan metode rangkaian ekivalen per – fasa. Motor induksi dapat dianggap sebagai transformator dengan rangkaian sekunder berputar. Rangkaian ekivalen statornya dapat digambarkan seperti Gambar 2.8:
Gambar2.8 Rangkaian ekivalen stator motor induksi dimana:
V1 = tegangan terminal stator (Volt)
E1 = ggl lawan yang dihasilkan oleh fluks celah udara resultan (Volt) I1 = arus stator (Ampere)
R1 = tahanan efektif stator (Ohm) X1 = reaktansi bocor stator (Ohm)
Arus stator terbagi atas 2 komponen, yaitu komponen arus beban dan komponen arus penguat I0. Komponen arus penguat I0 merupakan arus stator tambahan yang diperlukan untuk menghasilkan fluksi celah udara resultan, dan merupakan fungsi ggm E1.
Hubungan antara tegangan yang diinduksikan pada rotor sebenarnya (Erotor) dan tegangan yang diinduksikan pada rotor ekivalen (E2S) adalah:
dimana a adalah jumlah lilitan efektif tiap fasa pada lilitan stator yang banyaknya a kali jumlah lilitan rotor.
Bila rotor – rotor diganti secara magnetik, lilitan – ampere masing – masing harus sama, dan hubungan antara arus rotor sebenarnya Irotor dan arus I2S pada rotor
sehingga hubungan antara impedansi bocor frekuensi slip Z2S dari rotor ekivalen dan impedansi bocor frekuensi slip Zrotor dari rotor sebenarnya adalah:
Z2S =
Nilai tegangan, arus dan impedansi tersebut diatas didefinisikan sebagai nilai yang referensinya ke stator.
Selanjutnya Persamaan (2.8) dapat dituliskan:
R2 = tahanan efektif referensi (Ohm)
sX2 = reaktansi bocor referensi pada frekuensi slip X2 didefinisikan sebagai harga reaktansi bocor rotor dengan referensi frekuensi stator (Ohm).
Reaktansi yang didapat pada Persamaan (2.9) dinyatakan dalam cara yang demikian karena sebanding dengan frekuensi rotor dan slip. Jadi X2 didefinisikan sebagai harga yang akan dimiliki oleh reaktansi bocor pada rotor dengan patokan pada frekuensi stator.
Pada stator ada gelombang fluks yang berputar pada kecepatan sinkron. Gelombang fluks ini akan mengimbaskan tegangan pada rotor dengan frekuensi slip sebesar E2s dan ggl lawan stator E1. Bila bukan karena efek kecepatan, tegangan rotor akan sama dengan tegangan stator, karena lilitan rotor identik dengan lilitan stator. Karena kecepatan relatif gelombang fluks terhadap rotor adalah s kali kecepatan terhadap stator, hubungan antara ggl efektif pada stator Dengan membagi Persamaan (2.10) dengan Persamaan (2.11) didapatkan:
Dengan membagi Persamaan (2.13) dengan s, maka didapat
2
Dari Persamaan (2.14) maka dapat digambarkan rangkaian ekivalen pada rotor
seperti Gambar 2.9.
Gambar2.9 Rangkaian ekivalen pada rotor motor induksi.
Dari penjelasan mengenai rangkaian ekivalen pada stator dan rotor di atas, maka dapat dibuat rangkaian ekivalen motor induksi tiga fasa pada masing – masing fasanya. Perhatikan Gambar 2.10 di bawah ini.
1
Gambar2.10 Rangkaian ekivalen motor induksi tiga fasa
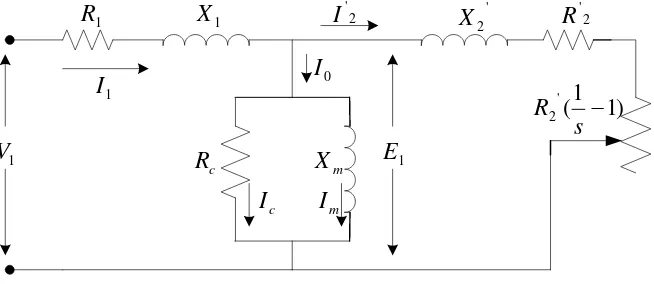
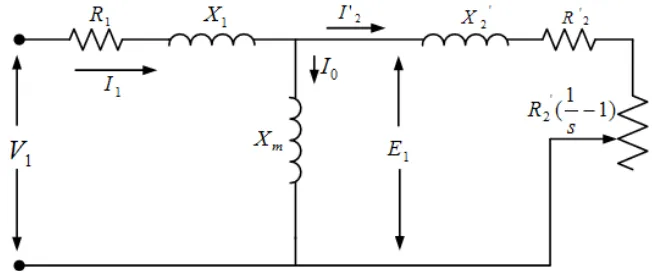
Untuk mempermudah perhitungan maka rangkaian ekivalen pada Gambar 2.10 diatas dapat dilihat dari sisi stator, rangkaian ekivalen motor induksi tiga fasa akan dapat digambarkan seperti Gambar 2.11 sebagai berikut.
1
Gambar2.11 Rangkaian ekivalen dilihat dari sisi stator motor induksi Atau seperti Gambar 2.12 berikut :
1
Dimana: X'2= a2X2
2 '
R = a2R2
Dalam teori transformator-statika, analisis rangkaian ekivalen sering disederhanakan dengan mengabaikan seluruh cabang penalaran atau melakukan pendekatan dengan memindahkan langsung ke terminal primer. Pendekatan demikian tidak dibenarkan dalam motor induksi yang bekerja dalam keadaan normal, karena adanya celah udara yang menjadikan perlunya suatu arus peneralan yang sangat besar (30% sampai 40% dari arus beban penuh) dan karena reaktansi bocor juga perlu lebih tinggi. Untuk itu dalam rangkaian ekivalen Rc
dapat dihilangkan (diabaikan). Rangkaian ekivalen menjadi Gambar 2.13 berikut.
Gambar 2.13 Rangkaian ekivalen dari motor induksi
2.9 Desain Motor Induksi
Motor asinkron yang sering kita temukan sehari-hari misalnya adalah kipas angin, mesin pendingin, kereta api listrik gantung, dan lain sebagainya. Untuk itu perlu diketahui kelas-kelas dari motor tersebut untuk mengetahui unjuk kerja dari motor tersebut. Adapun kelas-kelas tersebut adalah seperti Gambar 2.14
Tipe ini umumnya memiliki tahanan rotor sangkar yang rendah. Slip pada beban penuh kecil atau rendah namun efisiensinya tinggi. Torsi maksimum biasanya sekitar 21% dari torsi beban penuh dan slipnya kurang dari 21%. Motor kelas ini berkisar hingga 20 Hp.
2. Kelas B : Torsi start normal, arus start kecil dan slip rendah
Torsi start kelas ini hampir sama dengan kelas A tetapi arus startnya berkisar 75%Ifl . Slip dan efisiensi pada beban penuh juga baik. Kelas ini umumnya berkisar antara 7,5 Hp sampai dengan 200 Hp. Penggunaan motor ini antara lain : kipas angin, boiler, pompa dan lainnya.
3. Kelas C : Torsi start tinggi dan arus start kecil
Kelas ini memiliki resistansi rotor sangkar yang ganda yang lebih besar dibandingkan dengan kelas B. Oleh sebab itu dihasilkan torsi start yang lebih tinggi pada arus start yang rendah, namun bekerja pada efisisensi dan slip yang rendah dibandingkan kelas A dan B.
4. Kelas D : Tosi start tinggi, slip tinggi
Kelas ini biasanya memiliki resistansi rotor sangkar tunggal yang tinggi sehingga dihasilkan torsi start yang tinggi pada arus start yang rendah.
2.10 Aliran Daya Motor Induksi
Pada motor induksi, tidak ada sumber listrik yang langsung terhubung ke rotor, sehingga daya yang melewati celah udara sama dengan daya yang diinputkan ke rotor. Daya total yang dimasukkan pada kumparan stator (Pin) dirumuskan dengan
cos 3 1 1
in VI
P ( Watt )...(2.16)
dimana:
V1 = tegangan sumber (Volt) I1 = arus masukan(Ampere)
θ = perbedaan sudut fasa antara arus masukan dengan tegangan sumber
Daya listrik disuplai ke stator motor induksi diubah menjadi daya mekanik pada poros motor. Berbagai rugi – rugi yang timbul selama proses konversi energi listrik antara lain:
1.Rugi – rugi tetap (fixed losses), terdiri dari: rugi – rugi inti stator (Pi)
Pi = C
R E12
. 3
(Watt) ………...…..(2.17)
rugi – rugi gesek dan angin 2. Rugi – rugi variabel, terdiri dari:
rugi – rugi tembaga stator (Pts)
Ptr = 3. I22. R2(Watt) …………...………..(2.19) Daya pada celah udara (Pcu) dapat dirumuskan dengan:
Pcu = Pin– Pts– Pi (Watt) …...……(2.20)
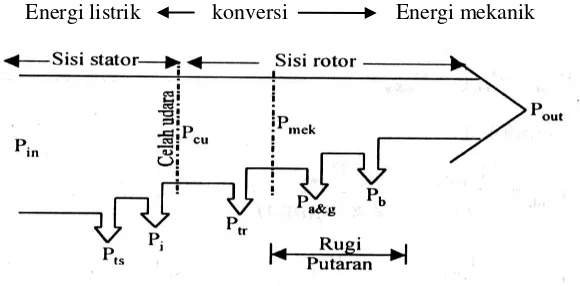
Gambar 2.15 menunjukkan aliran daya pada motor induksi tiga fasa:
Energi listrik konversi Energi mekanik
Gambar 2.15 Diagram aliran daya motor induksi
Jika dilihat pada rangkaian rotor, satu – satunya elemen pada rangkaian ekivalen yang mengkonsumsi daya pada celah udara adalah resistor R2 / s. Oleh karena itu daya pada celah udara dapat juga ditulis dengan:
Pcu = 3. I22. S
R2 (Watt) …………
...(2.21)
Apabila rugi – rugi tembaga dan rugi – rugi inti dikurangi dengan daya input motor, maka akan diperoleh besarnya daya listrik yang diubah menjadi daya mekanik.
Besarnya daya mekanik yang dibangkitkan motor adalah:
Pmek = Pcu– Ptr(Watt) ……...………(2.22)
Pmek = 3. I22. S R2
Pmek = 3. I22. R2. (
s s
1 )
Pmek = Ptr x (
s s
1
) (Watt) …………...…(2.23)
Dari Persamaan (2.21) dan (2.23) dapat dinyatakan hubungan rugi – rugi tembaga dengan daya pada celah udara:
Ptr = s. Pcu(Watt) ………...…………(2.24) Karena daya mekanik yang dibangkitkan pada motor merupakan selisih dari daya pada celah udara dikurangi dengan rugi – rugi tembaga rotor, maka daya mekanik dapat juga ditulis dengan:
Pmek = Pcu x ( 1 –s ) (Watt) ………...…(2.25) Daya output akan diperoleh apabila daya yang dikonversikan dalam bentuk daya mekanik dikurangi dengan rugi – rugi gesek dan angin, sehingga daya keluarannya:
Pout = Pmek– Pa&g– Pb(Watt) ………...…(2.26) Secara umum, perbandingan komponen daya pada motor induksi dapat dijabarkan dalam bentuk slip yaitu:
Pcu : Ptr : Pmek = 1 : s : 1 – s. Atau dapat digambarkan seperti Gambar 2.16 berikut:
Pcu = daya yang diinputkan ke rotor (Watt) Ptr = rugi – rugi tembaga rotor (Watt)
Pmek = daya mekanik dalam bentuk putaran (Watt)
Efisiensi dari suatu motor induksi didefenisikan sebagai ukuran keefektifan motor induksi untuk mengubah energi listrik menjadi energi mekanik yang dinyatakan sebagai perbandingan / rasio daya output (keluaran) dengan daya input ( masukan ), atau dapat juga dirumuskan dengan :
. ……….(2.27)
Ploss = Pin + Pi + Ptr + Pa & g + Pb ……….…………..(2.28) Pin = 3. V1. Cosθ……….………...(2.29)
Dari Persamaan (2.27) di atas dapat dilihat bahwa efisiensi motor tergantung pada besarnya rugi – rugi. Pada dasarnya metode yang digunakan untuk menentukan efisiensi motor induksi bergantung pada dua hal apakah motor itu dapat dibebani secara penuh atau pembebanan simulasi yang harus digunakan.
Efisiensi dari motor induksi dapat diperoleh dengan melakukan pengujian beban nol dan pengujian hubung singkat. Dari pengujian beban nol akan diperoleh rugi – rugi mekanik dan rugi – rugi inti. Rugi – rugi tembaga stator tidak dapat diabaikan sekalipun motor berbeban ringan maupun tanpa beban.