BAB 2 MOTOR INDUKSI TIGA FASA 2.1 Umum - Analisa Pengaruh Besar Tahanan Rotor Terhadap Torsi Dan Efisiensi Motor Induksi 3 Fasa Rotor Belitan ( Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU )
Teks penuh
Gambar


Dokumen terkait
Untuk mendapatkan efisiensi yang tinggi pada motor induksi tiga fasa, maka dirancanglah motor tersebut dengan memiliki tahanan rotor yang kecil.. Tahanan yang kecil ini
Adakalanya suatu motor induksi tiga fasa dibebani dengan suatu beban, dimana torsi beban yang dipikul lebih besar dari torsi awal yang dihasilkan oleh motor induksi,
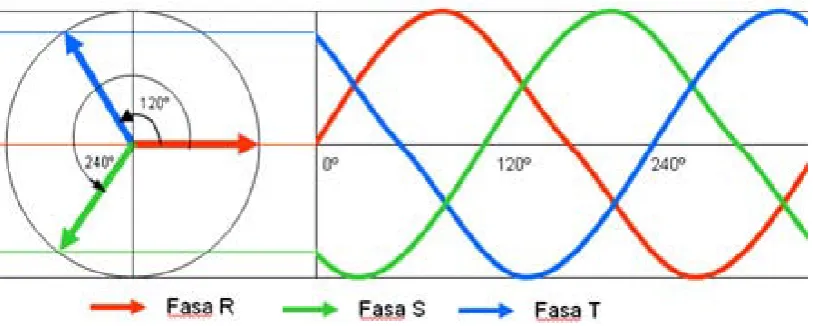
Bila sumber tegangan listrik tiga fasa yang seimbang, dihubungkan ke terminal belitan stator dari suatu motor induksi tiga fasa maka pada masing-masing belitan akan mengalir
“Analisis Pengaruh Beban Tidak Seimbang Terhadap Torsi dan Putaran Motor Induksi Tiga Fasa”.. Mesin Bolak-balik Yogyakarta:
Untuk memperoleh torsi dan kecepatan yang diharapkan pada motor induksi rotor belitan dapat dilakukan dengan cara, salah satunya adalah dengan metode tegangan
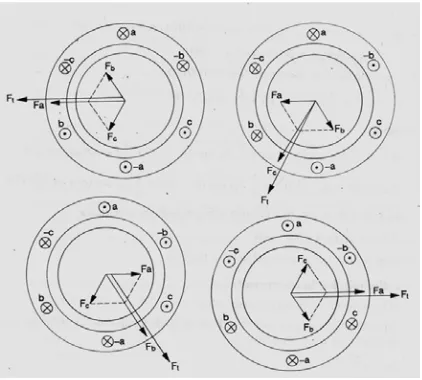
Pada saat terminal tiga fasa stator motor induksi diberi suplai tegangan tiga fasa seimbang, maka akan mengalir arus pada konduktor di tiap belitan fasa stator dan akan
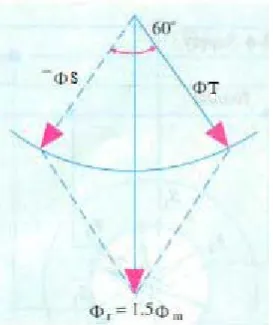
sf dan ketika arus ini mengalir pada masing – masing fasa di belitan rotor, akan memberikan reaksi medan magnet. Biasanya medan magnet pada rotor akan menghasilkan
Prinsip Kerja Motor Induksi Tiga Fasa Bila sumber tegangan listrik tiga fasa yang seimbang, dihubungkan ke terminal belitan stator dari suatu motor induksi tiga fasa maka pada
