UNIVERSITAS INDONESIA
ANALISA KETIDAKSEIMBANGAN FASA TERHADAP KEMAMPUAN KERJA (DERATING) MOTOR INDUKSI
SKRIPSI
UMARWIRAHADIKUSUMA 0906603165
FAKULTAS TEKNIK
PROGRAM STUDI TEKNIK ELEKTRO
DEPOK
UNIVERSITAS INDONESIA
ANALISA KETIDAKSEIMBANGAN FASA TERHADAP KEMAMPUAN KERJA (DERATING) MOTOR INDUKSI
SKRIPSI
Diajukan sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik
UMARWIRAHADIKUSUMA 0906603165
FAKULTAS TEKNIK
PROGRAM STUDI TEKNIK ELEKTRO DEPOK
JULI 2012
PERNYATAAN ORISINALITAS
Skripsi ini adalah hasil karya saya sendiri, dan semua sumber baik yang dikutip maupun dirujuk
telah saya nyatakan dengan benar.
Nama : Umar Wirahadi Kusuma
NPM : 0906603165
Tanda Tangan :
Tanggal : 2 Juli 2012
HALAMAN PENGESAHAN
Skripsi ini diajukan oleh :
Nama : Umar Wirahadi Kusuma
NPM : 0906603165
Program Studi : Teknik Elektro
Judul Skripsi : Analisa Ketidakseimbangan Fasa Terhadap Kemampuan Kerja (Derating) Motor Induksi
Telah berhasil dipertahankan di hadapan Dewan Penguji dan diterima sebagai bagian persyaratan yang diperlukan untuk memperoleh gelar Sarjana Teknik pada Program Studi Teknik Elektro Fakultas Teknik, Universitas Indonesia.
Ditetapkan di : Depok Tanggal : 2 Juli 2012
KATAPENGANTAR
SyukurAlhamdulillahpenulispanjatkankehadiratAlloh,atasberkatdanrahmat- Nyapenulisbisamenyelesaikanskripsi inidenganjudul“Analisa Ketidakseimbangan Fasa Terhadap Kemampuan Kerja (Derating) Motor Induksi”.
Penulis menyadari bahwa tanpa bimbingan dan bantuan dari berbagai pihak, dimulai dari masa perkuliahan sampai dengan penyusunan skripsi ini, sangatlah sulit bagi penulis untuk menyelesaikan skripsi tepat pada waktunya. Untuk itu saya mengucapkan terima kasih kepada :
1. Ir. Agus R. Utomo, MT selaku dosen pembimbing yang telah menyediakan waktu, tenaga dan pikiran untuk mengarahkan saya dalam penyusunan skripsi ini.
2. Orang tua dan keluarga yang telah banyak memberikan bantuan dukungan baik secara moral maupun material.
3. Sahabat, baik di lingkungan kampus maupun pergaulan yang telah memberikan dukungan dalam menyelesaikan skripsi
Akhir kata, penulis berharap Allah SWT. berkenan membalas setiap kebaikan semua pihak yang telah membantu. Semoga skripsi ini membawa manfaat untuk pengembangan ilmu kedepannya.
Depok,Juli 2012
HALAMAN PERNYATAAN PERSETUJUAN PUBLIKASI TUGAS AKHIR UNTUK KEPENTINGAN AKADEMIS
Sebagai sivitas akademik Universitas Indonesia, saya yang bertanda tangan di bawahini :
Nama : Umar Wirahadi Kusuma
NPM : 0906603165
Program Studi : Teknik Elektro Departemen : Teknik Elektro Fakultas : Teknik
Jenis karya : Skripsi
demi pengembangan ilmu pengetahuan, menyetujui untuk memberikan kepada Universitas Indonesia Hak Bebas Royalti Noneksklusif (Non-exclusive Royalty-Free Right) atas karya ilmiah saya yang berjudul :
“ANALISA KETIDAKSEIMBANGAN FASA TERHADAP KEMAMPUAN KERJA (DERATING) MOTOR INDUKSI”
beserta perangkat yang ada (jika diperlukan). Dengan Hak Bebas Royalti Noneksklusif ini Universitas Indonesia berhak menyimpan, mengalihmedia/formatkan, mengelola dalam bentuk pangkalan data (database), merawat, dan mempublikasikan tugas akhir saya selama tetap mencantumkan nama saya sebagai penulis/pencipta dan sebagai pemilik Hak Cipta.
Demikian pernyataan ini saya buat dengan sebenarnya.
Dibuat di : Depok Pada tanggal : 2 Juli 2012
Yang menyatakan
(Umar Wirahadi Kusuma)
ABSTRAK
Nama :UmarWirahadiKusuma ProgramStudi :TeknikElektro
Judul :Analisa Ketidakseimbangan Fasa Terhadap Kemampuan (Derating) Kerja Motor Induksi
Kemampuan kerja (derating) motor induksi berdasarkan standar internasional NEMA (National Electrical Manufacturers Association) dapat di hitung melalui ketidak seimbangan fasa nya. Pada studi kasus ini, kemampuan keraja motor karena ketidak seimbangan fasa berdasarkan NEMA dibandingkan dengan hasil perhitungan bersarkan data pengukuran.
KataKunci:
Tegangan tidak seimbang,derating, komponen simetris
ABSTRACT
Name :UmarWirahadiKusuma FieldofStudy :ElectricalEngineering
Title :Analysis of Voltage Unbalance concerning to Induction Motor Derating
Based on standard of NEMA (National Electrical Manufacturers Association), the derating of induction motor due to voltage unbalance can be calculated. In this case study the derating of induction motor is compared to calculation based on measurement.
Keyword:
Voltage unbalance,derating, symmetric component
DAFTARISI
KATA PENGANTAR ... iv
ABSTRAK ... vi
ABSTRACT ... vii
DAFTAR ISI ... viii
DAFTAR GAMBAR ... x
DAFTAR TABEL ... xi
1. PENDAHULUAN ... 1
1.1 Latar Belakang Masalah ... 1
1.2 Tujuan Penulisan ... 2
1.3 Perumusan Masalah ... 2
1.4 Pembatasan Masalah ... 2
1.5 Metode Penulisan ... 2
1.6 Sistematika Penulisan ... 3
2. MOTOR INDUKSI 3 FASA ... 4
2.1 Definisi ... 4
2.2 Konstruksi Motor Induksi ... 4
2.2.1 Stator ... 5
2.2.2 Rotor ... 6
2.3 Prinsip Medan Putar ... 10
2.4 Prinsip Kerja Motor Induksi Tiga Fasa ... 11
2.5 Rangkaian Ekivalen Motor Induksi Tiga Fasa... 11
2.5.1 Rangkaian Ekivalen Stator ... 11
2.5.2 Rangkaian Ekivalen Rotor ... 12
2.5.3 Rangkaian Ekivalen Lengkap ... 13
3. KOMPONEN SIMETRIS ... 15
3.1 Definisi Komponen Simetris... 15
3.2 Ketidak seimbangan pada motor induksi ... 18
3.2.1 Tegangan urutan positif pada motor induksi ... 19
3.2.2 Tegangan urutan negatif pada motor induksi ... 20
3.2.3 Faktor tegangan tidak seimbang (VUF) ... 21
3.2.5 Faktor arus tidak seimbang (CUF) ... 21
3.3 Derating Factor ... 22
3.3.1 Standar NEMA tentang ketidakseimbangan tegangan motor induksi 22 3.3.2 Perhitungan Faktor derating dengan pendekatan arus tidak seimbang 23 4. ANALISA DATA KETIDAKSEIMBANGAN FASA DARI DATA HASIL PENGUKURAN ... 24
4.1 Data motor yang yang di ukur ... 24
4.2 Perhitungan VUF dan CUF dengan metode komponen simetris ... 26
4.2.1 MOTOR INDUKSI KM7401B ... 26
4.2.2 MOTOR INDUKSI KM6802B ... 30
4.2.3 MOTOR INDUKSI KM6801A ... 34
4.2.4 MOTOR INDUKSI GM7201E ... 38
4.3 Perbandingan antara pengukuran dan perhitungan (VUF, CUF)... 42
4.4 Perhitungan faktor derating pada masing-masing motor induksi. ... 42
4.4.1 MOTOR INDUKSI KM7401B ... 42
4.4.2 MOTOR INDUKSI KM6802B ... 43
4.4.3 MOTOR INDUKSI KM6801A ... 44
4.4.4 MOTOR INDUKSI GM7201E ... 44
4.5 Perbandingan faktor derating antara standar NEMA dan perhitungan menggunakan CUF ... 45
KESIMPULAN ... 47
DAFTAR PUSTAKA ... 48
DAFTARGAMBAR
Gambar 2.1 Konstruksi stator ... 5
Gambar 2.2 Komponen Stator Motor Induksi Tiga Fasa : ... 6
Gambar 2.3 Rotor Belitan ... 7
Gambar 2.4 (a) Tampilan Close-Up Bagian Slip Ring Rotor Belitan, ... 7
Gambar 2.5 Skematik Diagram Motor Induksi Rotor Belitan ... 7
Gambar 2.6 (a) Rotor Sangkar Tupai dan Bagian-bagiannya (b) Motor Induksi Tiga Fasa Rotor Sangkar Tupai ... 8
Gambar 2.7 Konstruksi rotor sangkar ... 9
Gambar 2.8 Kontruksi dasar mesin induksi ... 9
Gambar 2.9 Arus Tiga Fasa Setimbang ... 10
Gambar 2.10 Diagram Fasor Fluksi Tiga Fasa Setimbang ... 10
Gambar 2.11 Rangkaian Ekivalen Stator per-Fasa Motor Induksi ... 12
Gambar 2.12 Rangkaian Ekivalen per-Fasa Rotor Motor Induksi Keadaan Diam ... 13
Gambar 2.13 Rangkaian Ekivalen per-Fasa Motor Induksi dengan ... 14
Gambar 3.1 Komponen simetris dari sistem 3 fasa yang tidak seimbang ... 17
Gambar 3.2 Tegangan tak seimbang yang disusun dari tiga komponen simetris. ... 18
Gambar 3.3 Rangkaian ekivalen urutan positif motor induksi ... 19
Gambar 3.4 Rangkaian ekivalen urutan negatif motor induksi ... 20
Gambar 3.5 Kurva derating NEMA MG1 ... 22
Gambar 4.1 Fasor tegangan motor KM7401B ... 27
Gambar 4.2 Fasor arus motor KM7401B ... 29
Gambar 4.3 Fasor tegangan motor KM6802B ... 31
Gambar 4.4 Fasor arus motor KM6802B ... 33
Gambar 4.5 Fasor tegangan motor KM6801A ... 35
Gambar 4.6 Fasor arus motor KM6801A ... 37
Gambar 4.7 Fasor tegangan motor GM7201E ... 39
Gambar 4.8 Fasor arus motor GM7201E ... 41
Gambar 4.9 Derating motor dengan kurva NEMA ... 46
DAFTAR TABEL
Tabel 4-1 Data motor-motor induksi yang di ukur berdasarkan name plate 24 Tabel 4-2 Ketidakseimbangan tegangan dan arus pada motor berdasarkan 25
Tabel 4-3 Arus nol pada masing-masing motor 25
Tabel 4-4 Perbandingan antara pengukuran dan perhitungan (VUF, CUF) 42 Tabel 4-5 Standar NEMA vs perhitungan dengan menggunakan CUF 45 Tabel 5-1 Derating daya motor akibat ketidakseimbangan fasa. 47
BAB1 PENDAHULUAN
1. PENDAHULUAN
1.1 LatarBelakangMasalah
Motor induksi sangat banyak digunakan di dunia industri karena konstruksinya yang sederhana, perawatan yang mudah dan karakteristik operasi yang bagus. Pada umum nya motor-motor induksi tersebut digunakan untuk penggerak pompa dan kipas pendingin. Motor induksi yang paling banyak digunakan adalah motor induksi tiga fasa. Motor ini di rancang dengan asumsi sumber tegangan yang seimbang.
Sumber tegangan dari transmisi pada umum nya cukup seimbang, baik dari magnitude maupun sudut nya. Ketidakseimbangan fasa terjadi pada utilisasi, hal ini bisa dikarenakangangguan-gangguan asimetris dalam sistem tenaga, distribusi beban yang tidak seimbang, transmisi yang tidak sempurna, transformator yang kurang baik dan lain sebagainya.
Ketidakseimbangan fasa adalah perbedaan magnitude atau pun sudut masing-masing fasa pada sistem kelistrikan tiga fasa. Faktor ketidakseimbangan fasa dinyatakan dengan rasio perbandingan antara fasa urutan negatif terhadap fasa urutan positf yang dinyatakan dalam persen.
Sudah banyak studi yang membuktikan bahwa ketidak seimbangan fasa tidak baik terhadap motor. Ketidakseimbangan fasa bisa menyebabkan panas, merusak isolasi, menimbulkan getaran berlebih pada motor dan mengurangi usia motor. Untuk menjaga agar umur motor induksi yang beroperasi pada tegangan yang tidak seimbang tidak berkurang dengan cepat maka beban operasi motor tersebut perlu dikurangi dari kapasitas semula, atau yang biasa di sebut derating.
1.2 TujuanPenulisan
1. Menganalisa kemampuan kemampuan operasional motor induksi akibat ketidak seimbangan fasa
2. Membandingkan hasil perhitungan kemampuan operasional motor karena tegangan tak seimbang dengan standar NEMA
1.3 PerumusanMasalah
Dalam Analisa ketidakseimbangan fasa terahadap kemampuan kerja motor induksi akan dibahas tentang hal-hal sebagai berikut:
1. Definisi motor induksi
2. Komponen simetris untuk menganalisa ketidak seimbangan suatu sistem kelistrikan.
3. Derating motor induksi
1.4 PembatasanMasalah
1. Data yang di analisa adalah data hasil pengukuran terhadap empat buah motor induksi3 fasa dengan sepesifikasi masing-masing tegangan dan daya nya adalah:motor pertama 460 V, 100 kW. Motor kedua 4000 V, 750 kW. Motor ketiga4000 V, 2537 kW. Motor keempat 4000 V, 3350 kW.
2. Pembanding hasil analisa menggunakan standar internasional NEMA (National Electrical Manufacturers Associationi)
3. Analisa data dibatasi pada derating yang diakibatkan oleh ketidakseimbangan fasa.
1.5 MetodePenulisan
1. Menganalisa data pengukuran terhadap beberapa motor induksi 2. Hasil analisa dibandingkan dengan kurva derating NEMA MG1
3. Perhitungan dilakukan secara manual berdasarkan teori-teori pada literatur
4. Kesimpulan dibuat berdasarkan hasil analisa di atas.
1.6 SistematikaPenulisan
Bab pertama merupakan pendahuluan yang berisi latar belakang masalah, tujuan, rumusan masalah, batasan masalah, metodologi penulisan dan sistematika penulisan. Bab kedua merupakan landasan teori dari motor induksi, yang berisi penjelasan secara garis besar tentang motor listriklistrik dan dikhususkan pada motor induksi tiga fasa. Bab ketiga menjelaskan tentang prinsip-prinsip dasar analisa, terutama mengenai komponen simetris. Selanjut nya bab keempat berisi analisa dari kasus yang ada. Bab kelima merupakan bab terakhir yang berisi kesimpulan dari analisa data.
BAB2
MOTOR INDUKSI 3 FASA
2. MOTOR INDUKSI 3 FASA 2.1 Definisi
Motor induksi tiga fasa merupakan motor listrik arus bolak-balik yang paling banyak digunakan dalam dunia industri. Dinamakan motor induksi karena pada kenyataannya arus rotor motor ini bukan diperoleh dari suatu sumber listrik, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar. Dalam kenyataannya, motor induksi dapat diperlakukan sebagai sebuah transformator, yaitu dengan kumparan stator sebagai kumparan primer yang diam, sedangkan kumparan rotor sebagai kumparan sekunder yang berputar.
Motor induksi tiga fasa berputar pada kecepatan yang pada dasarnya adalah konstan, mulai dari tidak berbeban sampai mencapai keadaan beban penuh.
Kecepatan putaran motor ini dipengaruhi oleh frekuensi, dengan demikian pengaturan kecepatan tidak dapat dengan mudah dilakukan terhadap motor ini.
Walaupun demikian, motor induksi tiga fasa memiliki beberapa keuntungan, yaitu, sederhana, konstruksinya kokoh, harganya relatif murah, mudah dalam melakukan perawatan, dan dapat diproduksi dengan karakteristik yang sesuai dengan kebutuhan industri.
2.2 Konstruksi Motor Induksi
Sebuah motor induksi tiga fasa memiliki konstruksi yang hampir sama dengan motor listrik jenis lainnya. Motor ini memiliki dua bagian utama, yaitu stator yang merupakan bagian yang diam, dan rotor sebagai bagian yang berputar.
Antara bagian stator dan rotor dipisahkan oleh celah udara yang sempit, dengan jarak berkisar dari 0,4 mm sampai 4 mm.
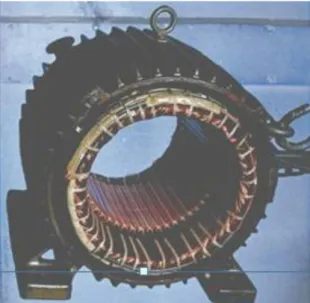
2.2.1 Stator
Bagiandarimesinyang tidakberputardanterletakpada bagianluar.
Dibuat dari besi bundar berlaminasi dan mempunyai alur-alur sebagai tempattempat meletakkan kumparan
Gambar 2.1 Konstruksi stator
Stator terdiri atas tumpukan laminasi inti yang memiliki alur yang menjadi tempat ku mparan dililitkan yang berbentuk silindris. Alur pada tumpukan laminasi inti diisolasi dengan kertas. Tiap elemen laminasi inti dibentuk dari lempengan besi. Tiap lempengan besi tersebut memiliki beberapa alur dan beberapa lubang pengikat untuk menyatukan inti. Tiap kumparan tersebar dalam alur yang disebut belitan fasa dimana untuk motor tiga fasa, belitan tersebut terpisah secara listrik sebesar 120°
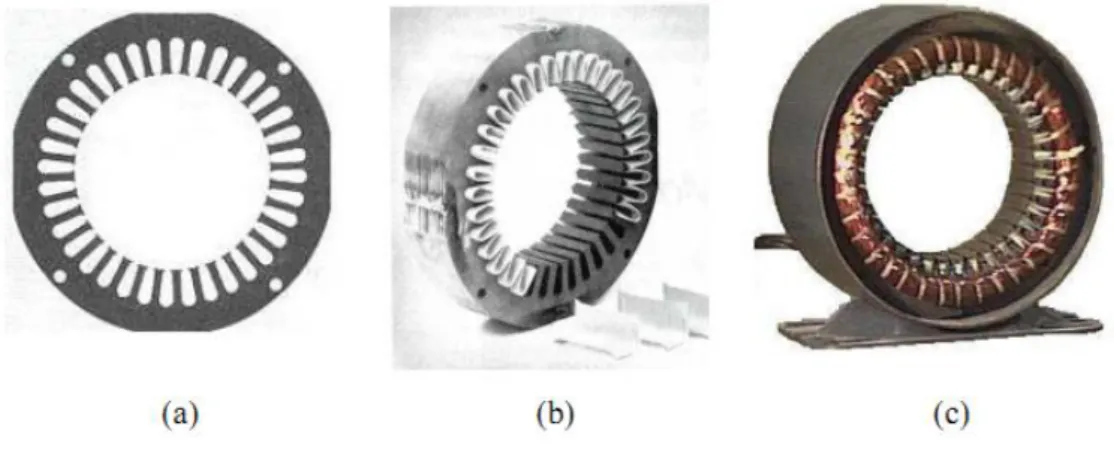
. Kawat kumparan yang digunakan terbuat dari tembaga yang dilapis dengan isolasi tipis. Kemudian tumpukan inti dan belitan stator diletakkan dalam cangkang silindris. Berikut ini contoh lempengan laminasi inti, lempengan inti yang telah disatukan, belitan stator yang telah dilekatkan pada cangkang luar untuk motor induksi tiga fasa.
Gambar 2.2 Komponen Stator Motor Induksi Tiga Fasa : (a) Lempengan Inti,
(b) Tumpukan Inti dengan Kertas Isolasi pada Beberapa Alurnya, (c) Tumpukan Inti dan Kumparan dalam Cangkang Stator.
2.2.2 Rotor
Berdasarkan jenis rotornya, motor induksi tiga fasa dapat dibedakan menjadi dua jenis, yang juga akan menjadi penamaan untuk motor tersebut, yaitu rotor belitan (wound rotor) dan rotor sangkar tupai (squirrel cage rotor).
2.2.2.1 Rotor Belitan
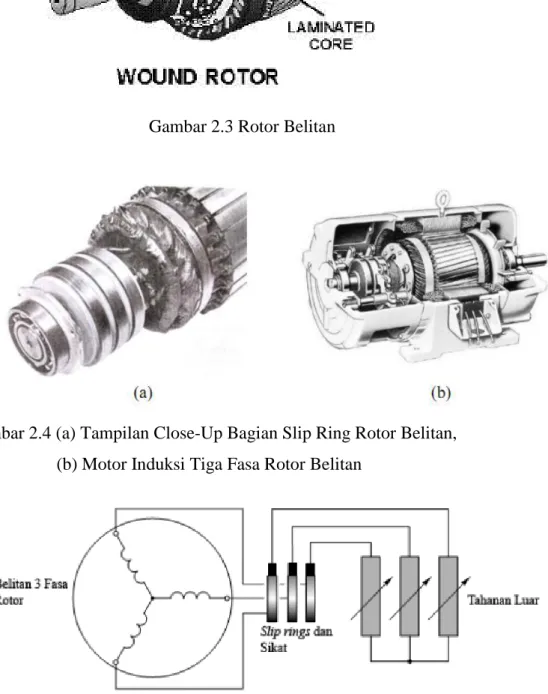
Jenis rotor belitan terdiri dari satu set lengkap belitan tiga fasa yang merupakan bayangan dari belitan pada statornya. Belitan tiga fasa pada rotor belitan biasanya terhubung Y, dan masing-masing ujung dari tiga kawat belitan fasa rotor tersebut dihubungkan pada slip ring yang terdapat pada poros rotor. Belitan-belitan rotor ini kemudian dihubung singkatkan melalui sikat (brush) yang menempel pada slip ring, dengan menggunakan sebuah perpanjangan kawat untuk tahanan luar.
Gambar 2.3 Rotor Belitan
Gambar 2.4 (a) Tampilan Close-Up Bagian Slip Ring Rotor Belitan, (b) Motor Induksi Tiga Fasa Rotor Belitan
Gambar 2.5Skematik Diagram Motor Induksi Rotor Belitan
Dari gambar diatas dapat dilihat bahwa semata-mata keberadaan slip ring dan sikat hanyalah sebagai penghubung belitan rotor ke tahanan luar (exsternal resistance). Keberadaan tahanan luar disini berfungsi pada saat pengasutan yang berguna untuk membatasi arus mula yang besar. Tahanan luar ini kemudian secaraperlahan dikurangi sampai resistansinya nol sebagaimana kecepatan motor bertambah mencapai kecepatan nominalnya. Ketika motor telah mencapai kecepatan nominalnya, maka tiga buah sikat akan terhubung singkat tanpa tahananluar sehingga rotor belitan akan bekerja seperti halnya rotor sangkar tupai.
2.2.2.2 Rotor Sangkar
Rotor sangkarmempunyai kumparan yang terdiri atas beberapa batang konduktor yang disusun sedemikian rupa hingga menyerupai sangkar tupai.
Rotorterdiri dari tumpukan lempengan besi tipis yang dilaminasi dan batang konduktor yang mengitarinya. Tumpukan besi yang dilaminasi disatukan untuk membentuk inti rotor. Alumunium (sebagai batang konduktor) dimasukan ke dalam slot dari inti rotor untuk membentuk serangkaian konduktor yang mengelilingi inti rotor. Rotor yang terdiri dari sederetan batang-batang konduktor yang terletak pada alur-alur sekitar permukaan rotor, ujung-ujungnya dihubung singkat dengan menggunakan cincin hubung singkat (shorting ring) atau disebut juga dengan end ring.
Gambar 2.6 (a) Rotor Sangkar Tupai dan Bagian-bagiannya (b) Motor Induksi Tiga Fasa Rotor Sangkar Tupai
Gambar 2.7 Konstruksi rotor sangkar
Gambar 2.8Kontruksi dasar mesin induksi
2.3 Prinsip Medan Putar
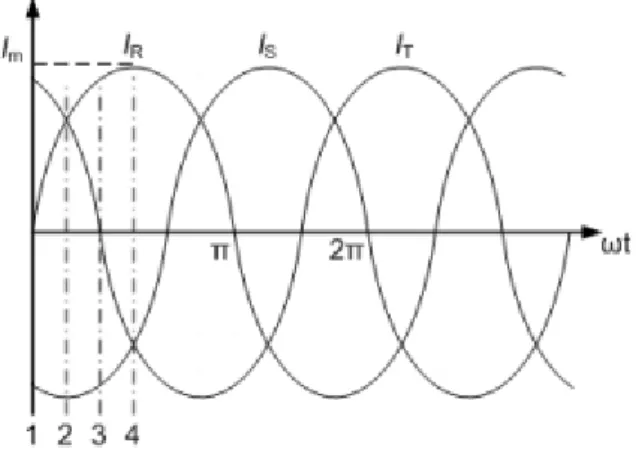
Pada saat kita menghubungkan sumber tiga fasa ke terminal tiga fasa motor induksi, maka arus bolak-balik sinusoidal IR, IS, IT akan mengalir pada belitan stator. Arus-arus ini akan menghasilkan ggm (gaya gerak magnet), yang mana pada kumparan akan menghasilkan fluks magnetik yang berputar sehingga disebut juga dengan medan putar. Medan magnet yang demikian kutub-kutubnya tidak diam pada posisi tertentu, tetapi meneruskan pergeseran posisinya disekitar stator.
Untuk melihat bagaimana medan putar dibangkitkan, maka dapat diambil contoh pada motor induksi tiga fasa dengan jumlah kutub dua. Fluks yang dihasilkan oleh arus-arus bolak-balik pada belitan stator adalah:
ΦR = Φm sin ωt
ΦS = Φm sin (ωt – 120°) ΦT = Φm sin (ωt – 240°)
Gambar 2.9Arus Tiga Fasa Setimbang
Gambar 2.10Diagram Fasor Fluksi Tiga Fasa Setimbang
2.4 Prinsip Kerja Motor Induksi Tiga Fasa
Pada saat terminal tiga fasa stator motor induksi diberi suplai tegangan tiga fasa seimbang, maka akan mengalir arus pada konduktor di tiap belitan fasa stator dan akan menghasilkan fluksi bolak-balik. Amplitudo fluksi per fasa yang dihasilkan berubah secara sinusoidal dan menghasilkan fluks resultan (medan putar) dengan magnitud yang nilainya konstan yang berputar dengan kecepatan sinkron:
𝑛𝑠 =120𝑓 𝑃 Dimana:
- ns = kecepatan sinkron/medan putar (rpm) - f = frekuensi sumber daya (Hz)
- P = jumlah kutub motor induksi
2.5 Rangkaian Ekivalen Motor Induksi Tiga Fasa
Telah disebutkan sebelumnya bahwa motor induksi identik dengan sebuah transformator, tentu saja dengan demikian rangkaian ekivalen motor induksi sama dengan rangkaian ekivalen transformator. Perbedaan yang ada hanyalah, karena pada kenyataannya bahwa kumparan rotor (kumparan sekunder pada transformator) dari motor induksi berputar, yang mana berfungsi untuk menghasilkan daya mekanik. Awal dari rangkaian ekivalen motor induksi dihasilkan dengan cara yang sama sebagaimana halnya pada transformator. Semua parameter-parameter rangkaian ekivalen yang akan dijelaskan berikut mempunyai nilai-nilai perfasa.
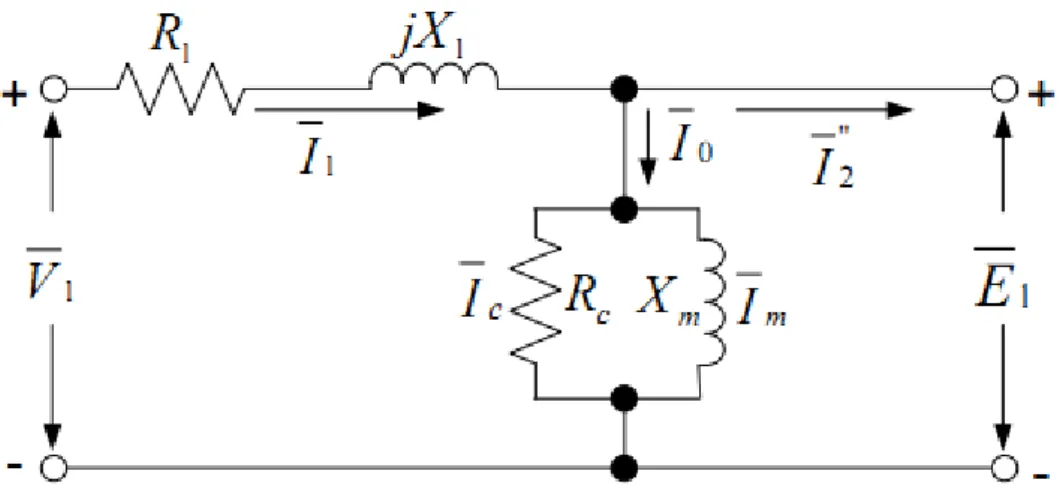
2.5.1 Rangkaian Ekivalen Stator
Gelombang fluks pada celah udara yang berputar dengan kecepatan sinkron membangkitkan ggl lawan tiga fasa yang seimbang di dalam fasa-fasa stator.
Besarnya tegangan terminal stator berbeda dengan ggl lawan sebesar jatuh tegangan pada impedansi bocor stator, sehingga dapat dinyatakan dengan persamaan :
𝑉1 = −𝐸1+ 𝐼1(𝑅1+ 𝑗𝑋1)
dimana,
𝑉1 = tegangan terminal stator (Volt)
𝐸1= ggl lawan yang dihasilkan oleh fluks celah udara resultan (Volt) 𝐼1= arus stator (Ampere)
𝑅1 = tahanan efektif stator (Ohm) 𝑗𝑋1 = reaktansi bocor stator (Ohm)
Sebagaimana halnya pada transformator, arus stator terdiri dari dua komponen. Komponen pertama adalah komponen beban yang akan menghasilkan fluks yang akan melawan fluks yang dihasilkan oleh arus rotor.
Komponen lainnya yaitu, arusini terbagi lagi menjadi dua komponen yaitu komponen rugi-rugi inti yang sefasa dengan dan komponen magnetisasi yang menghasilkan fluks magnetik pada inti dan celah udara yang tertinggal 90° dari𝐸1. Sehingga dapat dibuat rangkaian ekivalen pada stator, seperti gambar berikut ini.
Gambar 2.11Rangkaian Ekivalen Stator per-Fasa Motor Induksi
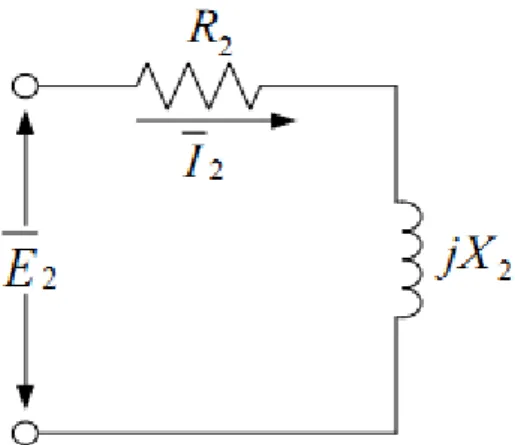
2.5.2 Rangkaian Ekivalen Rotor
Pada saat rotor dalam kondisi diam yaitu kondisi sesaat rotor sebelumbergerak atau pada saat rotor terkunci (locked-rotor), slip s = 1 dimana kecepatan rotor nr = 0, karena seluruh belitan rotor dihubung-singkat, maka
akan mengalirarus akibat ggl induksipada rotor. Sehingga dapat dituliskan persamaannyasebagai berikut :
𝐼2 = 𝐸2 𝑅2+ 𝑗𝑋2
Sedangkan rangkaian ekivalen rotor perfasa dalam keadaan diam (s = 1) digambarkan seperti gambar di bawah ini.
Gambar 2.12Rangkaian Ekivalen per-Fasa Rotor Motor Induksi Keadaan Diam
Dimana:
𝐼2 = arus rotor dalam keadaan diam (Ampere) 𝐸2 = ggl induksi rotor dalam keadaan diam (Volt) 𝑅2 = resistansi rotor (Ohm)
𝑗𝑋2 = reaktansi rotor dalam keadaan diam (Ohm)
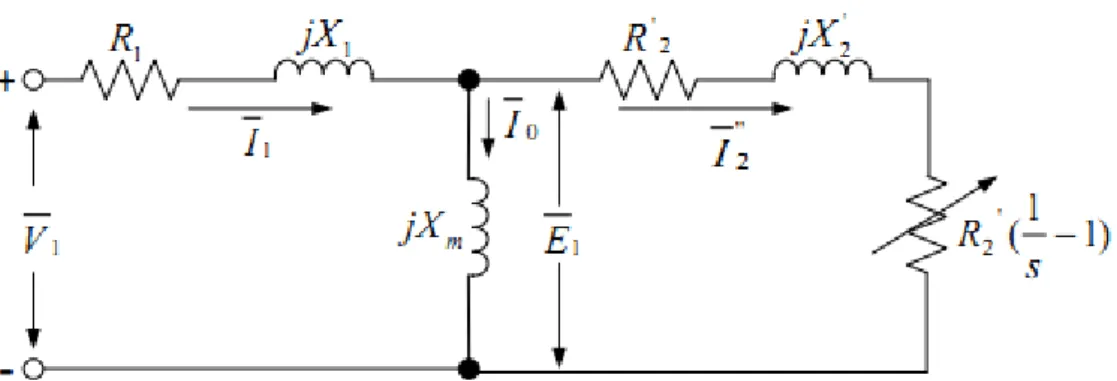
2.5.3 Rangkaian Ekivalen Lengkap
Dari penjelasan mengenai rangkaian ekivalen pada stator dan rotor di atas, maka dapat dibuat rangkaian ekivalen perfasa motor induksi dengan model transformator, dengan rasio perbandingan antara stator dan rotor. Untuk menghasilkan rangkaian ekivalen per-fasa akhir dari motor induksi, penting untuk menyatakan bagian rotor dari model rangkaian ekivalen terhadap sisi stator. Pada transformator yang umum, tegangan, arus, dan impedansi pada sisi sekunder, dapat dinyatakan terhadap sisi primer dengan menggunakan rasio perbandingan
digunakan adalah jenis rotor belitan dan terhubung bintang (Y), yang mana motor dengan rotor jenis ini sangat mirip dengan transformator, maka kita dapat juga menyatakan sisi rotor terhadap sisi stator seperti halnya pada transformator.
Pada transformator, analisis rangkaian ekivalen dilakukan denganmengabaikan cabang pararel yang terdiri dari Rc dan Xm atau dengan memindahkan cabang pararel ke terminal primer. Bagaimanapun, penyederhanaanini tidak diperbolehkan pada rangkaian ekivalen motor induksi.
Ini disebabkan kenyataan bahwa arus penguatan pada transformator bervariasi dari 2% sampai 6% dari arus beban penuh dan per unit reaktansi bocor primer kecil. Tetapi pada motor induksi, arus penguatan bervariasi dari 30% sampai 50%
dari arus beban penuh dan per unit reaktansi bocor stator adalah lebih tinggi.
Dengan demikian kesalahan yang besar akan terjadi dalam penentuan daya dan torsi, dalam hal cabang pararel diabaikan, atau dihubungkan pada terminal stator.
Dibawah kondisi kerja normal pada tegangan dan frekuensi konstan, rugiinti pada motor induksi biasanya juga konstan. Dalam pandangan pada kenyataan ini, tahanan rugi inti Rc yang mewakili rugi inti motor, dapat dihilangkan dari rangkaian ekivalen motor induksi pada gambar 2.12. Akan tetapi, untuk menentukan daya poros atau torsi poros, rugi inti yang konstan harus diikut- sertakan dalam pertimbangan, bersama dengan gesekan, rugi-rugi beban buta (stray-load losses) dan angin. Dengan penyederhanaan ini, maka dapat digambarkan rangkaian ekivalen baru (gambar 2.14.) dengan akurasi rugi yang dapat diabaikan.
Gambar 2.13 Rangkaian Ekivalen per-Fasa Motor Induksi dengan Mengabaikan Rugi Inti
BAB3
KOMPONEN SIMETRIS
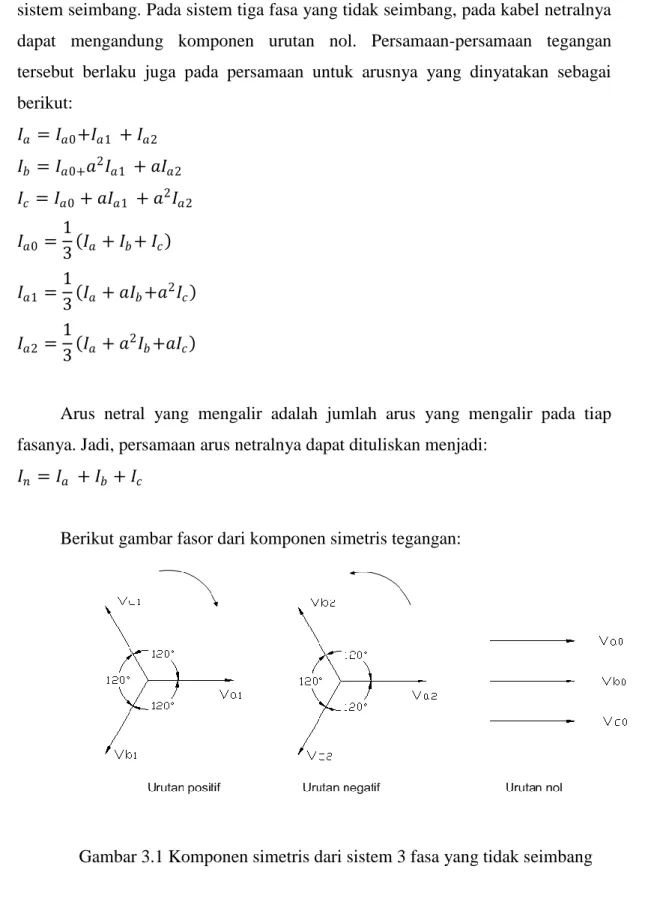
3. KOMPONEN SIMETRIS 3.1 Definisi Komponen Simetris
Pada kenyataannya sistem 3 fasa yang ada diberikan beban tidak seimbang.Sistem tiga fasa yang tidak seimbang ini dapat diuraikan menjadi tiga buahkomponen simetris untuk memudahkan analisis, yaitu:
1. Komponen urutan positif (positive sequence), yang fasorya sama besar danmempunyai beda fasa 120°, serta urutan fasanya sama dengan urutan fasaaslinya.
2. Komponen urutan negative (negative sequence), yang sama seperti urutanpositif, hanya urutan fasanya berlawanan dengan urutan fasa aslinya.
3. Komponen urutan nol (zero sequence) yang fasomya sama besar dan denganpergeseran fasa nol antara fasor yang satu dengan yang lain.
Notasi yang digunakan untuk komponen urutan tersebut biasanya diberikan subskrip 1, 2 dan 0 pada komponen arus dan tegangannva. Jadi, komponen urutan positif dari tegangan Va, Vb dan Vc adalah Val, Vb1 dan Vcl; komponen urutan negatifnya Va2, Vb2 dan Vc2; serta komponen umtan nolnya Vao, Vbo dan Vco.
Persamaan tegangan sistemnya mempakan penjumlahan dari masing-masing komponen simetrisnya, yaitu :
𝑉𝑎 = 𝑉𝑎1 + 𝑉𝑎2+ 𝑉𝑎0 𝑉𝑏 = 𝑉𝑏1 + 𝑉𝑏2+ 𝑉𝑏0 𝑉𝑐 = 𝑉𝑐1 + 𝑉𝑐2+ 𝑉𝑐0
𝑉𝑏1 = 𝑎2𝑉𝑎1𝑉𝑐1 = 𝑎𝑉𝑎1 𝑉𝑏2 = 𝑎𝑉𝑎2𝑉𝑐2= 𝑎2𝑉𝑎2 𝑉𝑏0 = 𝑉𝑎0𝑉𝑐0 = 𝑉𝑎0
𝑉𝑎 = 𝑉𝑎0+ 𝑉𝑎1 + 𝑉𝑎2 𝑉𝑏 = 𝑉𝑎0+ 𝑎2𝑉𝑎1 + 𝑎𝑉𝑎2 𝑉𝑐 = 𝑉𝑎0+ 𝑎𝑉𝑎1 + 𝑎2𝑉𝑎2
𝑎 = 1∠120° = −0.5 + 𝑗0,866 𝑎2 = 1∠240° = −0.5 − 𝑗0,866
Yang dapat dinyatakan dalam bentuk matriks : 𝑉𝑎
𝑉𝑏 𝑉𝑐
=
1 1 1 1 𝑎2 𝑎 1 𝑎 𝑎2
𝑉𝑎0 𝑉𝑎1 𝑉𝑎2
A=
1 1 1 1 𝑎2 𝑎 1 𝑎 𝑎2
Untuk mendapatkan komponen simetris nya, maka matriks teganganfasa tersebut dikalikan dengan matriks invers A dan diperoleh:
𝑉𝑎0 𝑉𝑎1 𝑉𝑎2
=
1 1 1 1 𝑎2 𝑎 1 𝑎 𝑎2
−1 𝑉𝑎 𝑉𝑏 𝑉𝑐
𝑉𝑎0 𝑉𝑎1 𝑉𝑎2
=1 3
1 1 1 1 𝑎 𝑎2 1 𝑎2 𝑎
𝑉𝑎 𝑉𝑏 𝑉𝑐
Sehingga, hubungan antara komponen-komponen simetrisnya dan tegangan sistemnya dapat dituliskan sebagai berikut:
𝑉𝑎0 = 1
3 𝑉𝑎 + 𝑉𝑏+𝑉𝑐 𝑉𝑎1 = 1
3 𝑉𝑎 + 𝑎𝑉𝑏+𝑎2𝑉𝑐 𝑉𝑎2 = 1
3 𝑉𝑎 + 𝑎2𝑉𝑏+𝑎𝑉𝑐
Komponen urutan nol tidak terdapat dalam sistem tenaga listrik apabila sistem seimbang. Pada sistem tiga fasa yang tidak seimbang, pada kabel netralnya dapat mengandung komponen urutan nol. Persamaan-persamaan tegangan tersebut berlaku juga pada persamaan untuk arusnya yang dinyatakan sebagai berikut:
𝐼𝑎 = 𝐼𝑎0+𝐼𝑎1 + 𝐼𝑎2 𝐼𝑏 = 𝐼𝑎0+𝑎2𝐼𝑎1 + 𝑎𝐼𝑎2 𝐼𝑐 = 𝐼𝑎0+ 𝑎𝐼𝑎1 + 𝑎2𝐼𝑎2 𝐼𝑎0 =1
3 𝐼𝑎 + 𝐼𝑏+ 𝐼𝑐 𝐼𝑎1 =1
3 𝐼𝑎 + 𝑎𝐼𝑏+𝑎2𝐼𝑐 𝐼𝑎2 =1
3 𝐼𝑎 + 𝑎2𝐼𝑏+𝑎𝐼𝑐
Arus netral yang mengalir adalah jumlah arus yang mengalir pada tiap fasanya. Jadi, persamaan arus netralnya dapat dituliskan menjadi:
𝐼𝑛 = 𝐼𝑎 + 𝐼𝑏 + 𝐼𝑐
Berikut gambar fasor dari komponen simetris tegangan:
Gambar 3.1 Komponen simetris dari sistem 3 fasa yang tidak seimbang
Gambar 3.2Tegangan tak seimbang yang disusun dari tiga komponen simetris.
3.2 Ketidak seimbangan pada motor induksi
Kinerja motor dipengaruhi oleh kualitas daya yang masuk,yang ditentukan oleh tegangan dan frekuensi aktual dibandingkan dengan nilai dasar. Fluktuasi dalam tegangan dan frekuensi yang lebih besar daripada nilai yang diterima memiliki dampak yang merugikan pada kinerja motor.
Ketidakseimbangan tegangan bahkan dapat lebih merugikan terhadap kinerja motor dan terjadi apabila tegangan tiga fase dari motor tiga fase tidak sama. Hal ini biasanya disebabkan oleh:
- Perbedaan pasokan tegangan untuk setiap fase pada tigafase.
- Karakteristik beban - Kegagalan isolasi
- Sistem penguatan yang tidak stabil
Tegangan masing-masing fase pada sistim tiga fase besarannya harus sama, simetris, dan dipisahkan oleh sudut 120°. Beberapa faktor dapat mempengaruhi kesetimbangan tegangan: beban fase tunggal pada setiap satu fase, ukuran kabel yang berbeda, atau kegagalan pada sirkuit. Ketidakseimbangan sistim meningkatkan kehilangan pada sistim distribusi dan menurunkan efisiensi motor.
Jika tegangan tidak seimbang diberikan kepada motor induksi, maka kemampuan motor akan berubah. Pendekatan langsung yang sering digunakan adalah membagi tegangan tidak seimbang menjadi dua komponen simetris, yaitu komponen urutan positif dan komponen urutan negative. Masing-masing komponen menghasil kan arus urutan positif dan arus urutan negatif.
. .
3.2.1 Tegangan urutan positif pada motor induksi
Beirikut ini adalah rangkaian ekivalen urutan positif pada motor induksi pada saat motor mendapat tegangan tak seimbang.
R1 jX1
jXm jX2
V1 R2/s
Gambar 3.3 Rangkaian ekivalen urutan positif motor induksi Dimana:
V1 = Tegangan urutan positif Rs = Tahanan stator
jXs = Reaktansi stator jXm =Reaktansi magnet jXr = Reaktansi rotor Rr = Tahanan rotor s = slip
Berdasarkan rangkaian equivalen di atas maka di dapat impedansi urutan positif dengan persamaan berikut:
𝑍1 = 𝑅𝑠+ 𝑗𝑋𝑠+ 𝑗𝑋𝑚 𝑅𝑠𝑟+ 𝑗𝑋𝑟
𝑅𝑟
𝑠 + 𝑗 𝑋𝑚+ 𝑋𝑟
Tegangan urutan positif dapat dihitung berdasarkan komponen simetris dengan menggunakan persamaan berikut:
𝑉𝑎1 = 1
3 𝑉𝑎 + 𝑎𝑉𝑏+𝑎2𝑉𝑐
Dengan didapatnya tegangan urutan positif dan impedansi urutan negatif maka arus urutan positif bisa dihitung menggunakan persamaan berikut:
𝐼1 = 𝑉1 𝑍1
3.2.2 Tegangan urutan negatif pada motor induksi
Beirikut ini adalah rangkaian ekivalen urutan negatif pada motor induksi pada saat motor mendapat tegangan tak seimbang.
R1 jX1
jXm jX2
R2/(2-s) V2
Gambar 3.4 Rangkaian ekivalen urutan negatif motor induksi Dimana:
V2 = Tegangan urutan negatif Rs = Tahanan stator
jXs = Reaktansi stator jXm =Reaktansi magnet jXr = Reaktansi rotor Rr = Tahanan rotor s = slip
𝑍2 = 𝑅𝑠+ 𝑗𝑋𝑠+ 𝑗𝑋𝑚 𝑅𝑟
2−𝑠+ 𝑗𝑋𝑟
𝑅𝑟
2−𝑠 + 𝑗 𝑋𝑚 + 𝑋𝑟
Tegangan urutan negatif dapat dihitung berdasarkan komponen simetris dengan menggunakan persamaan berikut:
𝑉𝑎2 = 1
3 𝑉𝑎 + 𝑎2𝑉𝑏+𝑎𝑉𝑐
Dengan didapatnya tegangan urutan positif dan impedansi urutan negatif maka arus urutan positif bisa dihitung menggunakan persamaan berikut:
𝐼2 = 𝑉2 𝑍2
3.2.3 Faktor tegangan tidak seimbang (VUF)
Faktor tegangan tidak seimbang (Voltage unbalance factor:VUF) adalah perbandingan tegangan urutan negatif terhadap tegangan urutan positif yang dinyatakan dalam persen, sesuai dengan persamaan berikut:
𝑉𝑈𝐹 =𝑉2
𝑉1× 100%
3.2.4 Arus tidak seimbang
Dengan menggunakan komponen simetris maka arus urutan positif dan arus urutan negatif dapat dihitung dengan menggunakan persamaan berikut:
𝐼𝑎1 =1
3 𝐼𝑎 + 𝑎𝐼𝑏+𝑎2𝐼𝑐 𝐼𝑎2 =1
3 𝐼𝑎 + 𝑎2𝐼𝑏+𝑎𝐼𝑐
3.2.5 Faktor arus tidak seimbang (CUF)
Faktor arus tidak seimbang (Current unbalance factor:CUF) adalah perbandingan arus urutan negatif terhadap tegangan urutan positif yang dinyatakan dalam persen, sesuai dengan persamaan berikut:
𝐶𝑈𝐹 =𝐼2
𝐼1× 100%
3.3 Derating Factor
3.3.1 Standar NEMA tentang ketidakseimbangan tegangan motor induksi
Untuk mencegah motor terlalu panas karena tegangan tidak seimbang pada saat dioperasikan, motor induksi harus di operasikan di bawah daya rated nya. Ini biasa di sebut motor induksi derating. Faktor derating motor induksi akibat tegangan tidak seimbang adalah rasio antara daya yang di hitung terhadap daya rated nya. Berdasarkan petunjuk NEMA, mengoperasikan motor induksi dengan besar tegangan tidak seimbang diatas 5% tidak direkomendasikan. Tegangan tidak seimbang membuat motor menjadi lebih panas. Menurut standar NEMA, pada saat tegangan tidak seimbang mencapai 5%, maka suhu akan naik lebih cepat.
Untuk mentoleransi panas yang diakibatkan oleh tegangan tidak seimbang maka standar NEMA menyarankan untuk menurunkan beban motor induksi.
Bedasarkan hasil berbagai test dari NEMA terhadap motor induksi maka didapat hubungan
1 +2 𝑃𝑒𝑟𝑠𝑒𝑛𝑡𝑎𝑠𝑖 𝑘𝑒𝑡𝑖𝑑𝑎𝑘𝑠𝑒𝑖𝑚𝑏𝑎𝑛𝑔𝑎𝑛 𝑡𝑒𝑔𝑎𝑛𝑔𝑎𝑛 2
100 = 𝑃𝑒𝑟𝑠𝑒𝑛𝑡𝑎𝑠𝑖 𝑏𝑒𝑏𝑎𝑛
100
−1.7
Perasamaan di atas dipresentasikan menjadi kurva NEMA MG1 berikut:
Gambar 3.5 Kurva derating NEMA MG1
3.3.2 Perhitungan Faktor derating dengan pendekatan arus tidak seimbang Didalam sebuah paper yang berjudul “Modeling and Testing of Unbalanced Loading and Voltage Regulation” M.W. Davis, R. Broadwater dan J. Hambrick menghitung derating factor dengan pendekatan persamaan sebagai berikut:
I1 = 1 − V2 V1
Z1 Z2
2
× Irated
Dimana:
V2 V1
Z1 Z2 = I2
I1 I2
I1 = CUF 100
Jadi,
I1 = 1 − CUF 100
2
× Irated
Dimana:
I1 = Arus urutan positif I2 = Arus urutan negtif V1 = Tegangan urutan positif V2 = Tegangan urutan negatif Z1 = Impedansi urutan positif Z2 = Impedansi urutan negatif Irated = Arus rated
CUF = Curren Unbalance Factor
I1 adalah arus maksimum yang diperbolehkan pada belitan stator maka derating motor menjadi:
%Load = 1 − CUF 100
2
× 100%
BAB4
ANALISA KETIDAKSEIMBANGAN FASA PADA MOTOR INDUKSI
4. ANALISA DATA KETIDAKSEIMBANGAN FASA DARI DATA HASIL PENGUKURAN
Sistematika analisa data ketidakseimbangan motor-motor induksi berikut adalah dimulai dengan mengolah data pengukuran. Kemudian dilanjutkan dengan menghitung faktor ketidak seimbangan tegangan dan arus pada masing-masing motor. Selanjutnya, data hasil perhitungan akan dibandingkan dengan data hasil perhitungan dan menghitung selisih nya. Setelah itu, masing-masing motor akan di hitung faktor derating nya dengan acuan standar NEMA.
4.1 Data motor yang yang di ukur
Berikut ini adalah data spesifikasi motor induksi yang di dapat dari name plate motor.
Tabel 4-1Data motor-motor induksi yang di ukur berdasarkan nameplate
Item Equipments
KM7401B KM6802B KM6801A GM7201E
Classification A , B A , B A , B A – D
Manufacture Westing House JC Carter Siemens Toshiba
Name Plate (Rating)
Type Sqrl Cage Sqrl Cage Sqrl Cage Sqrl Cage
Power [ kW ] 750 100 3350 2537
Voltage [ V ] 4000 460 4000 4000
Irated (A) 127.36 147.66 568.86 430.80
Cos phi 0.85 0.85 0.85 0.85
No. of Phase 3 3 3 3
Frequency [Hz] 50 50 50 50
No. of Poles 2 2 4 12
Connection Y Y Y Y
NEMA Design Special WP II
Insulation Class B Special Cryogenic F B
Temp. Rise [°C] 90 N/A 80 N/A
Tabel berikut merupakan hasil pengukuran pada masing-masing motor.
Data pengukuran adalah tegangan, arus, faktor ketidakseimbangan tengangan, dan faktor ketidakseimbangan arus.
Tabel 4-2Ketidakseimbangan tegangan dan arus pada motor berdasarkan hasil pengukuran
Item Equipments
KM7401B KM6802B KM6801A GM7201E
VA(V) 4143.3∠0 476.07∠0 4091.1∠0 4164.0∠0 VB (V) 4225.2∠-119.93 475.11∠-120.13 4099.5∠-120.30 4165.7∠-120.12 VC (V) 4194.3∠119.07 474.98∠ 120.03 4081.3∠119.76 4159.4∠119.91
VUF (%) 1.18 0.10 0.26 0.10
IA(A) 95.6∠-47.15 118.67∠-59.81 420.∠-53.46 326∠-71.67 IB (A) 80.6∠179.41 111.74∠178.66 363∠173.90 274∠-175.67 IC(A) 99.5∠57.51 112.77∠60.20 463.∠53.20 191∠51.38
CUF (%) 2.76 2.64 0.93 6.10
Tabel berikut merupakan hasil perhitungan arus nol pada masing-masing motor.
Tabel 4-3 Arus nol pada masing-masing motor
Item
Equipments
KM7401B KM6802B KM6801A GM7201E
In (A) 40.61 4.53 181.31 188.1
4.2 Perhitungan VUF dan CUF dengan metode komponen simetris
Dari data tegangan dan arus yang ada, maka bisa dihitung faktor ketidakseimbangan arus dan tegangan dengan menggunakan metoda komponen simetris.
4.2.1 MOTOR INDUKSIKM7401B Diketahui:
VA=4143.3∠0 VB=4225.2∠-119.93 VC=4194.3∠119.07 IA=95.6∠-47.15 IB=80.6∠179.41 IC=99.5∠57.51 a = 1∠120°
Maka, 𝑉1 =1
3 𝑉𝐴+ 𝑎𝑉𝐵+𝑎2𝑉𝐶 𝑉1 =1
3 4143.3∠0° + 𝑎4225.2∠ − 119.93° + a24194.3∠119.07°
𝑉1 = 4187.47∠ − 0.29°
𝑉2 = 1
3 𝑉𝐴 + 𝑎2𝑉𝐵+𝑎𝑉𝐶 𝑉2 = 1
3 4143.3∠0° + a24225.2∠ − 119.93° + 𝑎4194.3∠119.07°
𝑉2 = 47.42∠155.63°
𝑉𝑈𝐹 =𝑉2
𝑉1× 100%
𝑉𝑈𝐹 = 47.42
4187.47× 100%
𝑽𝑼𝑭 = 𝟏. 𝟏𝟑%
Gambar 4.1Fasor tegangan motor KM7401B
Keterangan:
:Tegangan fasa
: Tegangan urutan positif : Tegangan urutan negatif : Tegangan urutan nol
𝐼1 =1
3 𝐼𝐴+ 𝑎𝐼𝐵+𝑎2𝐼𝐶 𝐼1 =1
3 95.6∠ − 47.15° + 𝑎80.6∠179.41° + a299.5∠57.51°
𝐼1 = 91.22∠ − 56.63A°
𝐼2 = 1
3 𝐼𝐴+ 𝑎2𝐼𝐵+𝑎𝐼𝐶 𝐼2 = 1
3 95.6∠ − 47.15° + a280.6∠179.41° + 𝑎99.5∠57.51°
𝐼2 = 2.52∠28.63°
𝐶𝑈𝐹 = 𝐼2
𝐼1 × 100 𝐶𝑈𝐹 = 2.52
91.22× 100%
𝑪𝑼𝑭 = 𝟐. 𝟕𝟔%
Gambar 4.2 Fasor arus motor KM7401B
Keterangan:
: Arus fasa
: Arus urutan positif : Arus urutan negatif : Arus urutan nol
4.2.2 MOTOR INDUKSIKM6802B Diketahui:
VA=476.07∠0 VB=475.11∠-120.13 VC=474.98∠ 120.03 IA=118.67∠-59.81 IB=111.74∠178.66 IC=112.77∠60.20 a = 1∠120°
𝑉1 =1
3 𝑉𝐴+ 𝑎𝑉𝐵+𝑎2𝑉𝐶 𝑉1 =1
3 476.07∠0° + 𝑎475.11∠ − 120.13° + a2474.98∠ 120.03°
𝑉1 = 475.38∠ − 0.03°
𝑉2 = 1
3 𝑉𝐴 + 𝑎2𝑉𝐵+𝑎𝑉𝐶 𝑉2 = 1
3 476.07∠0° + a2475.11∠ − 120.13° + 𝑎474.98∠ 120.03°
𝑉2 = 0.75∠13.60°
𝑉𝑈𝐹 =𝑉2
𝑉1× 100 𝑉𝑈𝐹 = 0.75
475.38× 100%
𝑽𝑼𝑭 = 𝟎. 𝟏𝟔%
Gambar 4.3 Fasor tegangan motor KM6802B
Keterangan:
: Tegangan fasa
: Tegangan urutan positif : Tegangan urutan negatif : Tegangan urutan nol
𝐼1 =1
3 𝐼𝐴+ 𝑎𝐼𝐵+𝑎2𝐼𝐶 𝐼1 =1
3 118.67∠ − 59.81° + 𝑎111.74∠178.66° + a2112.77∠60.20°
𝐼1 = 114.38∠ − 60.30A°
𝐼2 = 1
3 𝐼𝐴+ 𝑎2𝐼𝐵+𝑎𝐼𝐶 𝐼2 = 1
3 118.67∠ − 59.81° + a2111.74∠178.66° + 𝑎112.77∠60.20°
𝐼2 = 3.02∠ − 56.29°
𝐶𝑈𝐹 = 𝐼2
𝐼1 × 100 𝐶𝑈𝐹 = 3.02
114.38× 100%
𝑪𝑼𝑭 = 𝟐. 𝟔𝟒%
Gambar 4.4 Fasor arus motor KM6802B
Keterangan:
: Arus fasa
: Arus urutan positif : Arus urutan negatif : Arus urutan nol
4.2.3 MOTOR INDUKSIKM6801A Diketahui:
VA=4091.1∠0 VB=4099.5∠-120.30 VC=4081.3∠119.76 IA=420.∠-53.46 IB=363∠173.90 IC=463.∠53.20 a = 1∠120°
𝑉1 =1
3 𝑉𝐴+ 𝑎𝑉𝐵+𝑎2𝑉𝐶 𝑉1 =1
3 4091.1∠0 ° + 𝑎4099.5∠ − 120.30° + a24081.3∠119.76°
𝑉1 = 4090.62∠ − 0.18°
𝑉2 = 1
3 𝑉𝐴 + 𝑎2𝑉𝐵+𝑎𝑉𝐶 𝑉2 = 1
3 4091.1∠0 ° + a24099.5∠ − 120.30° + 𝑎4081.3∠119.76°
𝑉2 = 11.77∠82.63°
𝑉𝑈𝐹 =𝑉2
𝑉1× 100 𝑉𝑈𝐹 = 11.77
4090.62× 100%
𝑽𝑼𝑭 = 𝟎. 𝟐𝟔%
Gambar 4.5 Fasor tegangan motor KM6801A
Keterangan:
: Tegangan fasa
: Tegangan urutan positif : Tegangan urutan negatif : Tegangan urutan nol
𝐼1 =1
3 𝐼𝐴+ 𝑎𝐼𝐵+𝑎2𝐼𝐶 𝐼1 =1
3 420. ∠ − 53.46° + 𝑎363∠173.90° + a2463. ∠53.20°
𝐼1 = 412.93∠ − 62.11A°
𝐼2 = 1
3 𝐼𝐴+ 𝑎2𝐼𝐵+𝑎𝐼𝐶 𝐼2 = 1
3 420. ∠ − 53.46° + a2363∠173.90° + 𝑎463. ∠53.20°
𝐼2 = 3.82∠68.54°
𝐶𝑈𝐹 = 𝐼2
𝐼1 × 100 𝐶𝑈𝐹 = 3.82
412.93× 100%
𝑪𝑼𝑭 = 𝟎. 𝟗𝟑%
Gambar 4.6 Fasor arus motor KM6801A
Keterangan:
: Arus fasa
: Arus urutan positif : Arus urutan negatif : Arus urutan nol
4.2.4 MOTOR INDUKSI GM7201E Diketahui:
VA=4164.0∠0 VB=4165.7∠-120.12 VC=4159.4∠119.91 IA=326∠-71.67 IB=274∠-175.67 IC=191∠51.38 a = 1∠120°
𝑉1 =1
3 𝑉𝐴+ 𝑎𝑉𝐵+𝑎2𝑉𝐶 𝑉1 =1
3 4164.0∠0° + 𝑎4165.7∠ − 120.12° + a24159.4∠119.91°
𝑉1 = 4163.03∠0°
𝑉2 = 1
3 𝑉𝐴 + 𝑎2𝑉𝐵+𝑎𝑉𝐶 𝑉2 = 1
3 4164.0∠0° + a24165.7∠ − 120.12° + 𝑎4159.4∠119.91°
𝑉2 = 1.88∠75.12°
𝑉𝑈𝐹 =𝑉2
𝑉1× 100 𝑉𝑈𝐹 = 1.88
4163.03× 100%
𝑽𝑼𝑭 = 𝟎. 𝟎𝟒%
Gambar 4.7 Fasor tegangan motor GM7201E
Keterangan:
: Tegangan fasa
: Tegangan urutan positif : Tegangan urutan negatif : Tegangan urutan nol
𝐼1 =1
3 𝐼𝐴+ 𝑎𝐼𝐵+𝑎2𝐼𝐶 𝐼1 =1
3 326∠ − 71.67° + 𝑎274∠ − 175.67° + a2191∠51.38°
𝐼1 = 261.60∠ − 65.40A°
𝐼2 = 1
3 𝐼𝐴+ 𝑎2𝐼𝐵+𝑎𝐼𝐶 𝐼2 = 1
3 326∠ − 71.67° + a2274∠ − 175.67° + 𝑎191∠51.38°
𝐼2 = 15.62∠ − 46.29°
𝐶𝑈𝐹 = 𝐼𝑛
𝐼𝑝 × 100 𝐶𝑈𝐹 = 15.62
261.60× 100%
𝑪𝑼𝑭 = 𝟓. 𝟗𝟕%
Gambar 4.8 Fasor arus motor GM7201E
Keterangan:
: Arus fasa
: Arus urutan positif : Arus urutan negatif : Arus urutan nol
4.3 Perbandinganantara pengukuran dan perhitungan (VUF, CUF)
Tabel berikut menunjukkan perbandingan faktor ketidakseimbangan tegangan dan faktor ketidakseimbangan arus.
Tabel 4-4Perbandingan antara pengukuran dan perhitungan (VUF, CUF)
Equipments VUF (%) CUF (%)
Hitung Ukur SELISIH Hitung Ukur SELISIH KM7401B 1.13 1.18 0.05 2.76 2.76 0
KM6802B 0.16 0.10 0.06 2.64 2.64 0 KM6801A 0.29 0.26 0.03 0.93 0.93 0 GM7201E 0.04 0.10 0.06 6.10 6.10 0
4.4 Perhitungan faktor derating pada masing-masing motor induksi.
Setelah di dapat faktor ketidakseimbangan tegangan dan faktor ketidakseimbangn arus, maka kita dapat menghitung faktor derating pada masing- masing motor dengan menggunakan standar NEMA dan faktor derating dengan menggunakan CUF.
4.4.1 MOTOR INDUKSIKM7401B
4.4.1.1 Perhitungan menggunakan standar NEMA 𝑽𝑼𝑭 = 𝟏. 𝟏𝟑%
%Load = 1 +2VUF )2
100
−1.7 × 100%
%Load = 1 +2(1.13)2
100
−1.7 × 100%
%Load = 98.52%
4.4.1.2 Perhitungan menggunakan CUF 𝑪𝑼𝑭 = 𝟐. 𝟕𝟔%
%Load = 1 − CUF 100
2
× 100%
%Load = 1 − 2.76 100
2
× 100%
%Load = 99.96%
4.4.2 MOTOR INDUKSIKM6802B
4.4.2.1 Perhitungan menggunakan standar NEMA 𝑽𝑼𝑭 = 𝟎. 𝟏𝟔%
%Load = 1 +2(VUF )2
100
−1.7 × 100%
%Load = 1 +2(0.16)2
100
−1.7 × 100%
%Load = 99.97%
4.4.2.2 Perhitungan menggunakan CUF 𝑪𝑼𝑭 = 𝟐. 𝟔𝟒%
%Load = 1 − CUF 100
2
× 100%
%Load = 1 − 2.64 100
2
× 100%
%Load = 99.96%
4.4.3 MOTOR INDUKSIKM6801A
4.4.3.1 Perhitungan menggunakan standar NEMA 𝑽𝑼𝑭 = 𝟎. 𝟐𝟔%
Derating dengan NEMA:
%Load = 1 +2(VUF )2
100
−1.7 × 100%
%Load = 1 +2(0.26)2
100
−1.7 × 100%
%Load = 99.90%
4.4.3.2 Perhitungan menggunakan CUF 𝑪𝑼𝑭 = 𝟎. 𝟗𝟑%
%Load = 1 − CUF 100
2
× 100%
%Load = 1 − 0.93 100
2
× 100%
%Load = 99.9%
4.4.4 MOTOR INDUKSI GM7201E
4.4.4.1 Perhitungan menggunakan standar NEMA 𝑽𝑼𝑭 = 𝟎. 𝟎𝟒%
%Load = 1 +2VUF )2
100
−1.7 × 100%
%Load = 1 +2(0.04)2
100
−1.7 × 100%
%Load = 99.99%
4.4.4.2 Perhitungan menggunakan CUF 𝑪𝑼𝑭 = 𝟓. 𝟗𝟕%
%Load = 1 − CUF 100
2
× 100%
%Load = 1 − 5.97 100
2
× 100%
%Load = 99.82%
4.5 Perbandingan faktor derating antara standar NEMA dan perhitungan menggunakan CUF
Tabel 4-5 Standar NEMA vs perhitungan dengan menggunakan CUF Equipments Derating (%)
NEMA CUF SELISIH KM7401B 98.52 99.96 1.44 KM6802B 99.97 99.96 0.01 KM6801A 99.90 99.99 0.09 GM7201E 99.99 99.82 0.17
Gambar 4.9 Derating motor dengan kurva NEMA Keterangan
Merah: KM7401B
Kuning: KM6802B
Biru: KM6801A
Hijau: GM7201E
Standar NEMA berlaku untuk semua motor dan tidak tergantung pada kapasitas daya motor.
1 2 3 4 5 VUF
0.80 0.85 0.90 0.95 1.00
Derating
BABV KESIMPULAN
1. Ketidakseimbangan arus dan tegangan pada motor bisa berasal pasokan daya atau pun dari motor itu sendiri. Oleh sebab itu, sebelum melakukan pengukuran pastikan terlebih dahulu kondisi awal pasokan daya
2. Besarnya penyimpangan persentase tegangan (VUF) menunjukkan peresentase penurunan kemampuan kerja motor (Tabel 5-1).
Tabel 5-1 Derating daya motor akibat ketidakseimbangan fasa.
Equipments
VUF (%) Faktor Derating (NEMA)
Daya
Hitung Ukur Deviasi Name Plate (kW)
Derating (kW) KM7401B 1.13 1.18 0.05 98.52 750 738.9 KM6802B 0.16 0.10 0.06 99.97 100 99.97 KM6801A 0.29 0.26 0.03 99.90 3350 3346.65 GM7201E 0.04 0.10 0.06 99.99 2537 2536.75
DAFTARPUSTAKA
[1] Utomo, Agus R., Mesin Sinkron, Diktat Kuliah Teknik Tenaga Listrik, Departemen Teknik Elektro, Universitas Indonesia.
[2] Wildi, Theodore. Electrical Machines, Drives, and Power System Third Edition, New Jersey: Prentice-Hall International, Inc., 1997.
[3] Bab II Motor Induksi Tiga Fasa
http://repository.usu.ac.id/bitstream/123456789/20004/3/Chapter%20II.pdfd iakses pada tanggal 13Juni 2012
[4] Motor Induksi Tiga Fasa
http://student.eepis-its.edu/~shy/MESIN%20MI%203PHASA.ppt diakses pada tanggal 13Juni 2012
[5] Zuhal. Dasar Teknik Tenaga Listrik dan Elektronika Daya, Jakarta: PT.
Gramedia Pustaka Utama, 1995.
[7] K.S., Sandhu., Vineet Chaudhary. MATLAB & PSIM Based Analysis of Three- Phase Induction Motor Operation with Unbalanced Supply System.
[8] Davis, M.W., R. Broadwater, J. Hambrick. (2007). Modeling and Testing of Unbalanced Loading and Voltage Regulation. National Renewable Energy Laboratory. Colorado: National Renewable Energy Laboratory
[9] Krishna K.V. Vamsi,. Effects of unbalance voltage on induction motor current and its operation performance. Bangalore: Lecon Systems
[10] ANSARI, A A., D M DESHPANDE.(2009). INVESTIGATION OF PERFORMANCE OF 3-PHASE ASNCHRONOUS MACHINE UNDER VOLTAGE UNBALANCE. India: Journal of Theoretical and Applied Information Technology.