PERANCANGAN MOTOR INDUKSI 3 PHASA 90 kW
OLEH
NAMA : DAVID LUMBAN GAOL
NIM : 050402083
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
PERANCANGAN MOTOR INDUKSI 3 PHASA 90 kW
OLEH
NAMA : DAVID LUMBAN GAOL
NIM : 050402083
Tugas Akhir ini diajukan untuk melengkapi salah satu syarat untuk memperoleh gelar Sarjana Teknik
Pada
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
Sidang pada tanggal 16 Juli 2011 didepan Penguji:
1. Ir. Sumantri Zulkarnain : Ketua Penguji : 2. Ir. A. Rachman Hasibuan : Anggota Penguji :
3. Ir. Satria Ginting : Anggota Penguji :
Disetujui oleh : Pembimbing Tugas Akhir,
(Ir.Syarifuddin Siregar) NIP:19461081976031002
Diketahui oleh:
Ketua Departemen Teknik Elektro,
ABSTRAK
Motor induksi tiga phasa merupakan jenis motor yang paling banyak digunakan pada
perindustrian. Motor inilah yang akan digunakan untuk memutar beban yang ada di
perindustrian. Motor induksi tiga phasa keluaran besarannya berupa torsi untuk menggerakkan
beban. Jika torsi beban yang dipikul motor induksi tiga phasa lebih besar, maka motor induksi
tiga phasa tidak akan berputar.
Untuk mendukung suatu perindustrian yang membutuhkan motor dengan rating dan
rancangan tertentu, maka diperlukan suatu desain motor dengan rancangan khusus untuk
pertimbangan ekonomis demi efisiensi biaya industri tersebut. Untuk itu pada Tugas Akhir ini
akan dirancang motor induksi dengan rating daya 90 kW, 3 phasa, 1 pasang kutub, frekuensi
sumber 50 Hz, tegangan 460/380 V, hubungan bintang, faktor daya yang diharapkan 0,9 dan
KATA PENGANTAR
Puji dan syukur penulis ucapkan kepada Tuhan Yesus atas kasih dan penyertaan-Nya
sehingga penulis dapat menyelesaikan Tugas Akhir yang berjudul :
PERANCANGAN MOTOR INDUKSI 3 PHASA 90 kW
Tugas Akhir ini merupakan bagian dari kurikulum yang harus diselesaikan untuk
memenuhi persyaratan menyelesaikan pendidikan Sarjana Strata Satu di Departemen Teknik
Elektro Fakultas Teknik Universitas Sumatera Utara.
Selama penulis menjalani pendidikan di kampus hingga diselesaikannya Tugas Akhir ini,
penulis banyak menerima bantuan, bimbingan serta dukungan dari berbagai pihak. Pada
kesempatan ini penulis ingin menyampaikan terimakasih yang tulus dan sebesar-besarnya kepada
1 Kedua Orang tua yang telah banyak memberikan kasih-sayang yang tak ternilai harganya
sehingga penulis mampu, bersemangat dan berkemauan keras untuk dapat menyelesaikan
Tugas Akhir ini. Juga kepada adik-adikku tercinta yang memberikan semangat dan
perhatian kepada penulis selama menyelesaikan tugas akhir ini.
2 Bapak Ir. A. Syarifuddin Siregar sebagai Dosen Pembimbing Pembimbing Akhir penulis
yang sangat besar bantuannya dalam menyelesaikan Tugas Akhir ini.
3 Bapak Ir. Arman Sani, MT sebagai Dosen Wali penulis selama menyelesaikan
pendidikan di kampus USU.
4 Bapak Ir. S. Tarmizi Kasim, M,Si sebagai Ketua Departemen Teknik Elektro Fakultas
5 Bapak Rahmad Fauzi, ST, MT sebagai Sekretaris Departemen Teknik Elektro Fakultas
Teknik Universitas Sumatera Utara.
6 Seluruh Staf Pengajar dan Pegawai Departemen Teknik Elektro FT-USU.
7 Kepada Sabrina Sianipar yang telah menemani penulis, memberikan semangat serta
motivasi yang besar untuk menyelesaikan Tugas Akhir ini.
8 Seluruh Teman-teman stambuk 2005 yang telah mendukung dan memberikan semangat
kepada penulis.
9 Seluruh Adik-adik stambuk yang juga membantu member masukan dalam Tugas Akhir
ini.
Penulis menyadari bahwa Tugas Akhir ini masih banyak kekurangannya. Untuk
itu penulis menerima dengan terbuka segala kritik dan saran dari pembaca untuk
menyempurnakan Tugas Akhir ini.
Akhir kata semoga Tugas Akhir ini dapat bermanfaat bagi kita semua.
Medan, Juni 2011
DAFTAR ISI
ABSTRAK…… ... i
KATA PENGANTAR………..ii
DAFTAR ISI………...iv
DAFTAR TABEL………....vi
DAFTAR GAMBAR………...………vii
BAB I PENDAHULUAN I.1 Latar Belakang ... 1
I.2 Tujuan dan Manfaat penelitian ... 2
I.3 Batasan Masalah ... 2
I.4 Metode Penelitian ... 3
I.5 Sistematika Penulisan ... 3
BAB II MOTOR INDUKSI II.1 Umum ... 5
II.2 Konstruksi Motor Induksi... 8
II.3 Jenis Motor Induksi 3 Phasa ... 10
II.4 Prinsip Kerja Motor Induksi Tiga Phasa ... 15
BAB III PERANCANGAN MOTOR INDUKSI 90 kW III.1 Umum ... 19
III.2 Merancang Parameter Stator ... 20
III.3 Merancang Belitan Stator ... 22
III.4 Perancangan Slot Stator ... 28
III.5 Perancangan Slot Rotor ... 33
III.6 Perancangan Gigi Slot Rotor ... 35
BAB IV PERHITUNGAN RANCANGAN MOTOR 3 PHASA 90 kW
IV.1 Umum ... 38
IV.2 Analisis Parameter Stator ... 38
IV.3 Analisis Rancangan Belitan Stator ... 40
IV.4 Perancangan Ukuran Slot Stator ... 44
IV.5 Analisis Perancangan Slot Rotor ... 49
IV.6 Analisis Perancangan Rotor Bar Current...50
IV.7 Analisis Perancangan Gigi Slot Rotor... 51
IV.8 Analisis Perancangan Teras Rotor ... 51
IV.9 Analisis Perancangan End Ring ... 52
BAB V KESIMPULAN DAN SARAN V.1 Kesimpulan ... 53
V.2 Saran ... 70
DAFTAR TABEL
Tabel 3.1. Tabel Stack Aspect Ratio ... 21
Tabel 3.2. Rasio diameter luar dan diameter dalam stator ... 22
Tabel 3.3. Standard Konduktor Magnetik ... 27
DAFTAR GAMBAR
Gambar 2.1 Desain Motor Induksi ... 5
Gambar 2.2 Motor Induksi 3 Phasa Modern ... 5
Gambar 2.3 Motor induksi 1 phasa dengan kapasitor Start and Run ... 6
Gambar 2.4 Motor induksi berbahan alluminium ... 7
Gambar 2.5 Gambar rotor dan stator... 9
Gambar 2.6 Menggambarkan Komponen Stator motor induksi tiga phasa ... 10
Gambar 2.7 Rotor Sangkar ... 11
Gambar 2.8 Konstruksi Motor Induksi Rotor Sangkar Ukuran Kecil dan Besar ... 12
Gambar 2.9 Gambar Skematik Motor ... 16
Gambar 2.10 Konstruksi Belitan Motor ... 17
Gambar 3.1 Grafik Sgap vs C0 ... 20
Gambar 3.2 Konstruksi belitan ... 23
Gambar 3.3 Hubungan slot motor 3 phasa , 2 kutub, 12 slot ... 24
Gambar 3.4 Grafik di hubungan kf dan 1+Ksd ... 25
Gambar 3.5 Bentuk slot yang sering digunakan... 28
Gambar 3.6 Gambar Slot Dirancang ... 29
Gambar 4.1Belitan 3 Phasa dengan 36 slot, 2 kutub, 2 layer ... 41
Gambar 4.2 Bentuk Slot Trapezoidal ... 45
ABSTRAK
Motor induksi tiga phasa merupakan jenis motor yang paling banyak digunakan pada
perindustrian. Motor inilah yang akan digunakan untuk memutar beban yang ada di
perindustrian. Motor induksi tiga phasa keluaran besarannya berupa torsi untuk menggerakkan
beban. Jika torsi beban yang dipikul motor induksi tiga phasa lebih besar, maka motor induksi
tiga phasa tidak akan berputar.
Untuk mendukung suatu perindustrian yang membutuhkan motor dengan rating dan
rancangan tertentu, maka diperlukan suatu desain motor dengan rancangan khusus untuk
pertimbangan ekonomis demi efisiensi biaya industri tersebut. Untuk itu pada Tugas Akhir ini
akan dirancang motor induksi dengan rating daya 90 kW, 3 phasa, 1 pasang kutub, frekuensi
sumber 50 Hz, tegangan 460/380 V, hubungan bintang, faktor daya yang diharapkan 0,9 dan
BAB II
MOTOR INDUKSI TIGA PHASA
II.1 UMUM
Faraday menemukan hukum induksi elektromagnetik pada tahun 1831 dan Maxwell
memformulasikannya ke hukum listrik (persamaan Maxwell) sekitar tahun 1860. Pengetahuan
tersebut dikembangkan hingga ditemukannya mesin induksi yang diperkenalkan Gallileo Ferraris
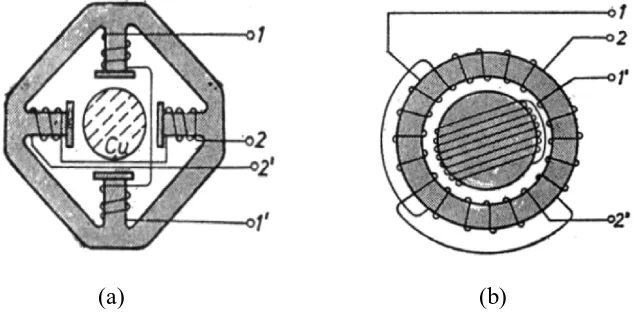
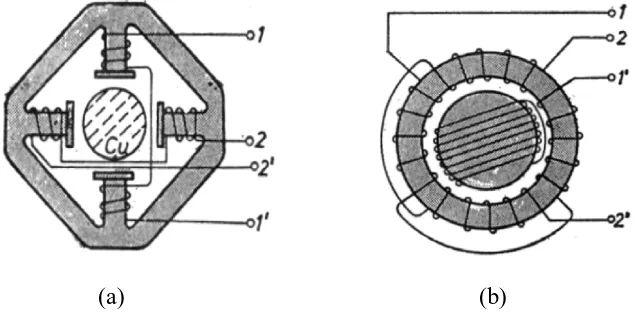
(1885) dan Nicola Tesla (1886). Mesin tersebut ditunjukkan pada gambar berikut.
(a) (b)
Gambar 2.1 (a) Desain motor induksi Ferrari
(b) Desain motor induksi Tesla
Kedua rancangan motor tersebut disuplai oleh tegangan ac 2 phasa dan terkonsentrasi
pada belitan 1-1’ dan 2-2’ pada inti stator ferromagnetik. Pada penemuan Ferrari, rotor terbuat
dari silinder berbahan tembaga sedangkan pada penemuan Tesla rotor terbuat dari silinder
berbahan ferromagnetic yang belitannya dihubung singkat.
Hingga pada saat sekarang motor induksi dikembangkan hingga seperti pada gambar 2.2
dan performansinya sudah jauh lebih baik, meskipun prinsip dasarnya adalah sama. Suatu belitan
menghasilkan arus pada belitan rotor yang terhubung singkat. Interaksi antara medan stator dan
rotor menghasilkan torsi sehingga mesin dapat berputar, oleh karena torsi rotor pada saat start
tidaklah nol, maka motor induksi dapat berputar secara langsung.
Pada tahun 1889, Dolivo Dobrovolsky menemukan motor induksi rotor belitan dan
secara konstruksi sangat persis dengan yang digunakan pada saat ini. Selain itu dia adalah
penemu rotor sangkar ganda. Pada tahun 1900, motor induksi telah digunakan pada
perindustrian. Tidak lama setelahnya, sebelum tahun 1910 di Eropa kereta api telah
menggunakan motor induksi sebagai penggerak yang dapat mencapai kecepatan 200 km/jam
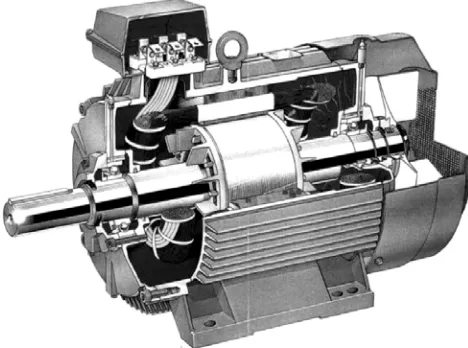
Gambar 2.2 Motor Induksi 3 Phasa Modern
Seiring dengan berkembangnya teknologi elektronika daya dan kendali digital, motor
induksi sangat populer dan mendapat julukan sebagai “ The Work House For Industry” dan
diberi label “ The Race Horse of High Technology”.
Motor induksi pada umumnya disuplai oleh sumber tegangan tiga phasa dan satu phasa.
Suplai motor 1 phasa belitan 2 phasa dan biasanya digunakan pada aplikasi rumahan (kipas
angin, mesin cuci, dan lain lain) berdaya diatas 2,7 sampai 3 kW. Motor induksi 1 phasa memiliki
Gambar 2.3. Motor induksi 1 phasa dengan kapasitor Start and Run
Motor induksi 3 phasa ada juga yang dirancang dari alluminium untuk penggunaan
tertentu dan biasanya dayanya dibawah 55 kW
Gambar 2.4 Motor induksi berbahan alluminium
Disamping standard motor (kelas B untuk amerika dan EFF1 di Eropa), kelas motor
berefesiensi tinggi (EFF2 dan EFF3) juga telah dalam proses perkembangan dan penelitian.
Tabel 1.2 menunjukkan kelas effisiensi standard Eropa (EFF1, EFF2, dan EFF3), diperkirakan
yang sangat signifikan. Motor berefisiensi tinggi tersebut dirancang dengan bertegangan 3800
sampai 11.500 Volt dan 50 – 60 Hz.
Hampir semua motor ac yang digunakan adalah motor induksi, terutama motor induksi
tiga phasa yang paling banyak dipakai di perindustrian. Motor induksi tiga phasa sangat banyak
dipakai sebagai penggerak di perindustrian karena banyak memiliki keuntungan, tetapi ada juga
kelemahannya.
Keuntungan motor induksi tiga phasa:
1. Motor induksi tiga phasa sangat sederhana dan kuat.
2. Biayanya murah dan dapat diandalkan.
3. Motor induksi tiga phasa memiliki efisiensi yang tinggi pada kondisi kerja normal.
4. Perawatanya mudah.
Kerugianya:
1. Kecepatannya tidak bisa bervariasi tanpa merubah efisiensi.
2. Kecepatannya tergantung beban.
3. Pada torsi start memiliki kekurangan.
II.2 Konstruksi Motor Induksi Tiga Phasa
Motor induksi adalah motor ac yang paling banyak dipergunakan, karena konstruksinya
yang kuat dan karakteristik kerjanya yang baik. Secara umum motor induksi terdiri dari rotor dan
stator. Rotor merupakan bagian yang bergerak, sedangkan stator bagian yang diam. Diantara
stator dengan rotor ada celah udara yang jaraknya sangat kecil. Konstruksi motor induksi dapat
Rotor
Stator
Gambar 2.5 Gambar rotor dan stator
Komponen stator adalah bagian terluar dari motor yang merupakan bagian yang diam dan
mengalirkan arus phasa. Stator terdiri atas tumpukan laminasi inti yang memiliki alur yang
menjadi tempat kumparan dililitkan yang berbentuk silindris. Alur pada tumpukan laminasi inti
diisolasi dengan kertas (Gambar 2.6.(b)). Tiap elemen laminasi inti dibentuk dari lembaran besi
(Gambar 2.6 (a)). Tiap lembaran besi tersebut memiliki beberapa alur dan beberapa lubang
pengikat untuk menyatukan inti. Tiap kumparan tersebar dalam alur yang disebut belitan phasa
dimana untuk motor tiga phasa, belitan tersebut terpisah secara listrik sebesar 120o. Kawat
kumparan yang digunakan terbuat dari tembaga yang dilapis dengan isolasi tipis. Kemudian
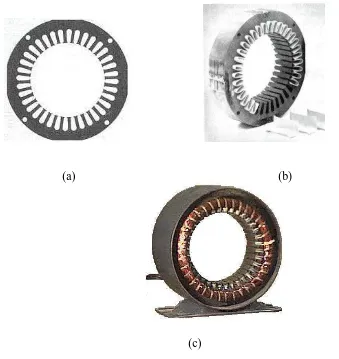
tumpukan inti dan belitan stator diletakkan dalam cangkang silindris (Gambar 2.6.(c)). Berikut
ini contoh lempengan laminasi inti, lempengan inti yang telah disatukan, belitan stator yang telah
Gambar 2.6 Menggambarkan Komponen Stator motor induksi tiga phasa, (a) Lempengan Inti, (b)
Tumpukan Inti dengan Kertas Isolasi pada Beberapa Alurnya, (c) Tumpukan Inti dan Kumparan Dalam
Cangkang Stator
Untuk rotor akan dibahas pada bagian berikutnya, yaitu jenis – jenis motor induksi tiga
phasa berdasarkan jenis rotornya.
II.3 Jenis Motor Induksi Tiga Phasa
Ada dua jenis motor induksi tiga phasa berdasarkan rotornya yaitu:
1. Motor induksi tiga phasa sangkar tupai ( squirrel-cage motor)
2. Motor induksi tiga phasa rotor belitan ( wound-rotor motor )
kedua motor ini bekerja pada prinsip yang sama dan mempunyai konstruksi stator yang
sama tetapi berbeda dalam konstruksi rotor.
(a) (b)
II.3.1 Motor Induksi Tiga Phasa Sangkar Tupai ( Squirrel-cage Motor)
Penampang motor sangkar tupai memiliki konstruksi yang sederhana. Inti stator pada
motor sangkar tupai tiga phasa terbuat dari lapisan – lapisan pelat baja beralur yang didukung
dalam rangka stator yang terbuat dari besi tuang atau pelat baja yang dipabrikasi. Lilitan – lilitan
kumparan stator diletakkan dalam alur stator yang terpisah 120 derajat listrik. Lilitan phasa ini dapat tersambung dalam hubungan delta ( Δ ) ataupun bintang ( Υ ).
Rotor jenis rotor sangkar ditunjukkan pada Gambar 2.7 di bawah ini.
Batang Poros
Kipas
Laminasi Inti Besi
Aluminium
Cincin Aluminium
Batang Poros
Kipas
Gambar 2.7 rotor sangkar, (a) Tipikal Rotor Sangkar, (b) Bagian-bagian Rotor Sangkar
(a)
Batang rotor dan cincin ujung motor sangkar tupai yang lebih kecil adalah coran tembaga
atau aluminium dalam satu lempeng pada inti rotor. Dalam motor yang lebih besar, batang rotor
tidak dicor melainkan dibenamkan ke dalam alur rotor dan kemudian dilas dengan kuat ke cincin
ujung. Batang rotor motor sangkar tupai tidak selalu ditempatkan paralel terhadap poros motor
tetapi kerapkali dimiringkan. Hal ini akan menghasilkan torsi yang lebih seragam dan juga
mengurangi derau dengung magnetik sewaktu motor sedang berputar.
Pada ujung cincin penutup dilekatkan sirip yang berfungsi sebagai pendingin. Rotor jenis
rotor sangkar standar tidak terisolasi, karena batangan membawa arus yang besar pada tegangan
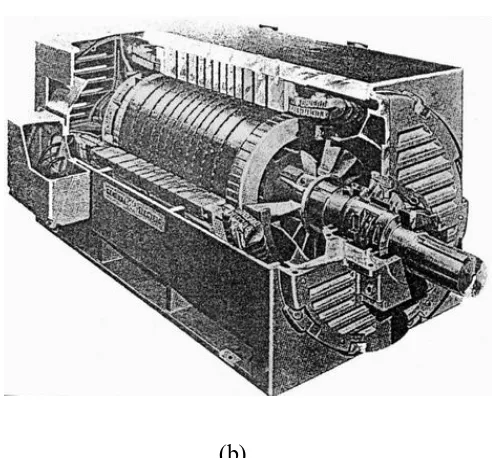
rendah. Motor induksi dengan rotor sangkar ditunjukkan pada Gambar 2.8.
Gambar 2.8 (a) Konstruksi Motor Induksi Rotor Sangkar Ukuran Kecil,
(b) Konstruksi Motor Induksi Rotor Sangkar Ukuran Besar
II.3.2 Motor Induksi Tiga Phasa Rotor Belitan ( wound-rotor motor )
Motor rotor belitan (motor cincin slip) berbeda dengan motor sangkar tupai dalam hal
konstruksi rotornya. Seperti namanya, rotor dililit dengan lilitan terisolasi serupa dengan lilitan
stator. Lilitan phasa rotor dihubungkan secara Υ dan masing – masing phasa ujung terbuka yang
dikeluarkan ke cincin slip yang terpasang pada poros rotor. Secara skematik dapat dilihat pada
gambar-2.9. Dari gambar ini dapat dilihat bahwa cincin slip dan sikat semata – mata merupakan
penghubung tahanan kendali variabel luar ke dalam rangkaian rotor.
Sumber tegangan
Belitan Stator
Belitan Rotor
Slip Ring
Tahanan Luar
Gambar 2.9 Gambar skematik motor
Pada motor ini, cincin slip yang terhubung ke sebuah tahanan variabel eksternal yang
berfunsi membatasi arus pengasutan dan yang bertanggung jawab terhadap pemanasan rotor.
Selama pengasutan, penambahan tahanan eksternal pada rangkaian rotor belitan menghasilkan
torsi pengasutan yang lebih besar dengan arus pengasutan yang lebih kecil dibanding dengan
rotor sangkar. Konstruksi motor tiga phasa rotor belitan ditunjukkan pada gambar di bawah ini.
(b)
Gambar 2.10 (a) Rotor Belitan, (b) Konstruksi Motor Induksi Tiga Phasa dengan Rotor Belitan
II.4 Prinsip Kerja Motor Induksi Tiga Phasa
Motor induksi adalah peralatan pengubah energi listrik ke bentuk energi mekanik.
Pengubahan energi ini bergantung pada keberadaan phenomena alami magnetik, medan listrik,
gaya mekanis dan gerak.
Dalam motor induksi, tidak ada hubungan listrik ke rotor, arus rotor merupakan arus
induksi. Tetapi ada kondisi yang sama seperti motor dc, dimana pada rotor mengalir arus. Arus
ini berada dalam medan magnetik sehingga akan terjadi gaya (F) pada rotor yang akan
menggerakkan rotor dalam arah tegak lurus medan.
Jika pada belitan stator diberi tegangan tiga phasa, maka pada stator akan dihasilkan arus
tiga phasa, arus ini menghasilkan medan magnetik yang berputar dengan kecepatan sinkron.
Ketika medan melewati konduktor rotor, dalam konduktor ini diinduksikan ggl yang sama
Rangkaian rotor merupakan rangkaian tertutup, baik melalui cincin ujung atau tahanan luar, ggl
induksi menyebabkan arus mengalir dalam konduktor rotor. Jadi arus yang mengalir pada
konduktor rotor dalam medan magnet yang dihasilkan stator akan menghasilkan gaya (F) yang
bekerja pada rotor.
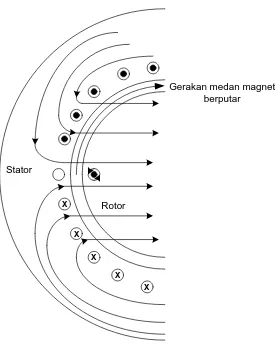
Gambar – 2.14 di bawah ini menggambarkan penampang stator dan rotor motor induksi,
dengan medan magnet diumpamakan berputar searah jarum jam dan dengan statornya diam
seperti pada saat start.
X X
X
X X X
X
Stator
Rotor
Gerakan medan magnet berputar
Gambar 2. 11. Penampang stator dan motor
Untuk arah fluksi dan gerak yang ditunjukkan gambar di atas, penggunaan aturan tangan
kanan fleming bahwa arah arus induksi dalam konduktor rotor menuju pembaca. Pada kondisi
seperti itu, dengan konduktor yang mengalirkan arus berada dalam medan magnet seperti yang
ditunjukkan, gaya pada konduktor mengarah ke atas karena medan magnet di bawah konduktor
lebih kuat dari pada medan di atasnya. Agar sederhana, hanya satu konduktor rotor yang
diperlihatkan. Tetapi, konduktor – konduktor rotor yang berdekatan lainnya dalam medan stator
juga mengalirkan arus dalam arah seperti pada konduktor yang ditunjukkan, dan juga
berikutnya, arah medan stator akan dibalik, tetapi arus rotor juga akan dibalik, sehingga gaya
pada rotor tetap ke atas. Demikian pula konduktor rotor di bawah kutub – kutub medan stator
lain akan mempunyai gaya yang semuanya cenderung memutarkan rotor searah jarum jam. Jika
kopel yang dihasilkan cukup besar untuk mengatasi kopel beban yang menahan, motor akan
melakukan percepatan searah jarum jam atau dalam arah yang sama dengan perputaran medan
magnet stator.
Untuk memperjelas prinsip kerja motor induksi tiga phasa, maka dapat dijabarkan dalam
langkah – langkah berikut:
1. Pada keadaan beban nol ketiga phasa stator yang dihubungkan dengan sumber tegangan tiga
phasa yang setimbang menghasilkan arus pada tiap belitan phasa.
2. Arus pada tiap phasa menghasilkan fluksi bolak-balik yang berubah-ubah.
3. Amplitudo fluksi yang dihasilkan berubah secara sinusoidal dan arahnya tegak lurus terhadap
belitan phasa.
4. Akibat fluksi yang berputar timbul ggl pada stator motor yang besarnya adalah:
e1 =
dt d N Φ
− 1 ( Volt )
atau E1 =4,44fN1Φ ( Volt ).
5. Penjumlahan ketiga fluksi bolak-balik tersebut disebut medan putar yang berputar dengan
kecepatan sinkron ns, besarnya nilai ns ditentukan oleh jumlah kutub p dan frekuensi stator f
yang dirumuskan dengan
p f
ns =120× ( rpm ).
6. Fluksi yang berputar tersebut akan memotong batang konduktor pada rotor. Akibatnya pada
E2 =4,44fN2Φm ( Volt )
dimana :
E2 = Tegangan induksi pada rotor saat rotor dalam keadaan diam (Volt)
N2 = Jumlah lilitan kumparan rotor
Фm = Fluksi maksimum (Wb)
7. Karena kumparan rotor merupakan rangkaian tertutup, maka ggl tersebut akan menghasilkan
arus I2
8. Adanya arus I2 di dalam medan magnet akan menimbulkan gaya F pada rotor
9. Bila kopel mula yang dihasilkan oleh gaya F cukup besar untuk memikul kopel beban, rotor
akan berputar searah medan putar stator
10.Perputaran rotor akan semakin meningkat hingga mendekati kecepatan sinkron. Perbedaan kecepatan medan stator (ns) dan kecepatan rotor (nr) disebut slip (s) dan dinyatakan dengan
100% s
r s − × =
n n n s
11.Pada saat rotor dalam keadaan berputar, besarnya tegangan yang terinduksi pada kumparan
rotor akan bervariasi tergantung besarnya slip. Tegangan induksi ini dinyatakan dengan E2s
yang besarnya:
E2s = 4,44sfN2Φm ( Volt )
dimana
E2s = tegangan induksi pada rotor dalam keadaan berputar (Volt)
f2 = s.f = frekuensi rotor (frekuensi tegangan induksi pada rotor dalam keadaan berputar)
12.Bila ns = nr, tegangan tidak akan terinduksi dan arus tidak akan mengalir pada kumparan
BAB II
MOTOR INDUKSI TIGA PHASA
II.1 UMUM
Faraday menemukan hukum induksi elektromagnetik pada tahun 1831 dan Maxwell
memformulasikannya ke hukum listrik (persamaan Maxwell) sekitar tahun 1860. Pengetahuan
tersebut dikembangkan hingga ditemukannya mesin induksi yang diperkenalkan Gallileo Ferraris
(1885) dan Nicola Tesla (1886). Mesin tersebut ditunjukkan pada gambar berikut.
(a) (b)
Gambar 2.1 (a) Desain motor induksi Ferrari
(b) Desain motor induksi Tesla
Kedua rancangan motor tersebut disuplai oleh tegangan ac 2 phasa dan terkonsentrasi
pada belitan 1-1’ dan 2-2’ pada inti stator ferromagnetik. Pada penemuan Ferrari, rotor terbuat
dari silinder berbahan tembaga sedangkan pada penemuan Tesla rotor terbuat dari silinder
berbahan ferromagnetic yang belitannya dihubung singkat.
Hingga pada saat sekarang motor induksi dikembangkan hingga seperti pada gambar 2.2
dan performansinya sudah jauh lebih baik, meskipun prinsip dasarnya adalah sama. Suatu belitan
menghasilkan arus pada belitan rotor yang terhubung singkat. Interaksi antara medan stator dan
rotor menghasilkan torsi sehingga mesin dapat berputar, oleh karena torsi rotor pada saat start
tidaklah nol, maka motor induksi dapat berputar secara langsung.
Pada tahun 1889, Dolivo Dobrovolsky menemukan motor induksi rotor belitan dan
secara konstruksi sangat persis dengan yang digunakan pada saat ini. Selain itu dia adalah
penemu rotor sangkar ganda. Pada tahun 1900, motor induksi telah digunakan pada
perindustrian. Tidak lama setelahnya, sebelum tahun 1910 di Eropa kereta api telah
menggunakan motor induksi sebagai penggerak yang dapat mencapai kecepatan 200 km/jam
Gambar 2.2 Motor Induksi 3 Phasa Modern
Seiring dengan berkembangnya teknologi elektronika daya dan kendali digital, motor
induksi sangat populer dan mendapat julukan sebagai “ The Work House For Industry” dan
diberi label “ The Race Horse of High Technology”.
Motor induksi pada umumnya disuplai oleh sumber tegangan tiga phasa dan satu phasa.
Suplai motor 1 phasa belitan 2 phasa dan biasanya digunakan pada aplikasi rumahan (kipas
angin, mesin cuci, dan lain lain) berdaya diatas 2,7 sampai 3 kW. Motor induksi 1 phasa memiliki
Gambar 2.3. Motor induksi 1 phasa dengan kapasitor Start and Run
Motor induksi 3 phasa ada juga yang dirancang dari alluminium untuk penggunaan
tertentu dan biasanya dayanya dibawah 55 kW
Gambar 2.4 Motor induksi berbahan alluminium
Disamping standard motor (kelas B untuk amerika dan EFF1 di Eropa), kelas motor
berefesiensi tinggi (EFF2 dan EFF3) juga telah dalam proses perkembangan dan penelitian.
Tabel 1.2 menunjukkan kelas effisiensi standard Eropa (EFF1, EFF2, dan EFF3), diperkirakan
yang sangat signifikan. Motor berefisiensi tinggi tersebut dirancang dengan bertegangan 3800
sampai 11.500 Volt dan 50 – 60 Hz.
Hampir semua motor ac yang digunakan adalah motor induksi, terutama motor induksi
tiga phasa yang paling banyak dipakai di perindustrian. Motor induksi tiga phasa sangat banyak
dipakai sebagai penggerak di perindustrian karena banyak memiliki keuntungan, tetapi ada juga
kelemahannya.
Keuntungan motor induksi tiga phasa:
1. Motor induksi tiga phasa sangat sederhana dan kuat.
2. Biayanya murah dan dapat diandalkan.
3. Motor induksi tiga phasa memiliki efisiensi yang tinggi pada kondisi kerja normal.
4. Perawatanya mudah.
Kerugianya:
1. Kecepatannya tidak bisa bervariasi tanpa merubah efisiensi.
2. Kecepatannya tergantung beban.
3. Pada torsi start memiliki kekurangan.
II.2 Konstruksi Motor Induksi Tiga Phasa
Motor induksi adalah motor ac yang paling banyak dipergunakan, karena konstruksinya
yang kuat dan karakteristik kerjanya yang baik. Secara umum motor induksi terdiri dari rotor dan
stator. Rotor merupakan bagian yang bergerak, sedangkan stator bagian yang diam. Diantara
stator dengan rotor ada celah udara yang jaraknya sangat kecil. Konstruksi motor induksi dapat
Rotor
Stator
Gambar 2.5 Gambar rotor dan stator
Komponen stator adalah bagian terluar dari motor yang merupakan bagian yang diam dan
mengalirkan arus phasa. Stator terdiri atas tumpukan laminasi inti yang memiliki alur yang
menjadi tempat kumparan dililitkan yang berbentuk silindris. Alur pada tumpukan laminasi inti
diisolasi dengan kertas (Gambar 2.6.(b)). Tiap elemen laminasi inti dibentuk dari lembaran besi
(Gambar 2.6 (a)). Tiap lembaran besi tersebut memiliki beberapa alur dan beberapa lubang
pengikat untuk menyatukan inti. Tiap kumparan tersebar dalam alur yang disebut belitan phasa
dimana untuk motor tiga phasa, belitan tersebut terpisah secara listrik sebesar 120o. Kawat
kumparan yang digunakan terbuat dari tembaga yang dilapis dengan isolasi tipis. Kemudian
tumpukan inti dan belitan stator diletakkan dalam cangkang silindris (Gambar 2.6.(c)). Berikut
ini contoh lempengan laminasi inti, lempengan inti yang telah disatukan, belitan stator yang telah
Gambar 2.6 Menggambarkan Komponen Stator motor induksi tiga phasa, (a) Lempengan Inti, (b)
Tumpukan Inti dengan Kertas Isolasi pada Beberapa Alurnya, (c) Tumpukan Inti dan Kumparan Dalam
Cangkang Stator
Untuk rotor akan dibahas pada bagian berikutnya, yaitu jenis – jenis motor induksi tiga
phasa berdasarkan jenis rotornya.
II.3 Jenis Motor Induksi Tiga Phasa
Ada dua jenis motor induksi tiga phasa berdasarkan rotornya yaitu:
1. Motor induksi tiga phasa sangkar tupai ( squirrel-cage motor)
2. Motor induksi tiga phasa rotor belitan ( wound-rotor motor )
kedua motor ini bekerja pada prinsip yang sama dan mempunyai konstruksi stator yang
sama tetapi berbeda dalam konstruksi rotor.
(a) (b)
II.3.1 Motor Induksi Tiga Phasa Sangkar Tupai ( Squirrel-cage Motor)
Penampang motor sangkar tupai memiliki konstruksi yang sederhana. Inti stator pada
motor sangkar tupai tiga phasa terbuat dari lapisan – lapisan pelat baja beralur yang didukung
dalam rangka stator yang terbuat dari besi tuang atau pelat baja yang dipabrikasi. Lilitan – lilitan
kumparan stator diletakkan dalam alur stator yang terpisah 120 derajat listrik. Lilitan phasa ini dapat tersambung dalam hubungan delta ( Δ ) ataupun bintang ( Υ ).
Rotor jenis rotor sangkar ditunjukkan pada Gambar 2.7 di bawah ini.
Batang Poros
Kipas
Laminasi Inti Besi
Aluminium
Cincin Aluminium
Batang Poros
Kipas
Gambar 2.7 rotor sangkar, (a) Tipikal Rotor Sangkar, (b) Bagian-bagian Rotor Sangkar
(a)
Batang rotor dan cincin ujung motor sangkar tupai yang lebih kecil adalah coran tembaga
atau aluminium dalam satu lempeng pada inti rotor. Dalam motor yang lebih besar, batang rotor
tidak dicor melainkan dibenamkan ke dalam alur rotor dan kemudian dilas dengan kuat ke cincin
ujung. Batang rotor motor sangkar tupai tidak selalu ditempatkan paralel terhadap poros motor
tetapi kerapkali dimiringkan. Hal ini akan menghasilkan torsi yang lebih seragam dan juga
mengurangi derau dengung magnetik sewaktu motor sedang berputar.
Pada ujung cincin penutup dilekatkan sirip yang berfungsi sebagai pendingin. Rotor jenis
rotor sangkar standar tidak terisolasi, karena batangan membawa arus yang besar pada tegangan
rendah. Motor induksi dengan rotor sangkar ditunjukkan pada Gambar 2.8.
Gambar 2.8 (a) Konstruksi Motor Induksi Rotor Sangkar Ukuran Kecil,
(b) Konstruksi Motor Induksi Rotor Sangkar Ukuran Besar
II.3.2 Motor Induksi Tiga Phasa Rotor Belitan ( wound-rotor motor )
Motor rotor belitan (motor cincin slip) berbeda dengan motor sangkar tupai dalam hal
konstruksi rotornya. Seperti namanya, rotor dililit dengan lilitan terisolasi serupa dengan lilitan
stator. Lilitan phasa rotor dihubungkan secara Υ dan masing – masing phasa ujung terbuka yang
dikeluarkan ke cincin slip yang terpasang pada poros rotor. Secara skematik dapat dilihat pada
gambar-2.9. Dari gambar ini dapat dilihat bahwa cincin slip dan sikat semata – mata merupakan
penghubung tahanan kendali variabel luar ke dalam rangkaian rotor.
Sumber tegangan
Belitan Stator
Belitan Rotor
Slip Ring
Tahanan Luar
Gambar 2.9 Gambar skematik motor
Pada motor ini, cincin slip yang terhubung ke sebuah tahanan variabel eksternal yang
berfunsi membatasi arus pengasutan dan yang bertanggung jawab terhadap pemanasan rotor.
Selama pengasutan, penambahan tahanan eksternal pada rangkaian rotor belitan menghasilkan
torsi pengasutan yang lebih besar dengan arus pengasutan yang lebih kecil dibanding dengan
rotor sangkar. Konstruksi motor tiga phasa rotor belitan ditunjukkan pada gambar di bawah ini.
(b)
Gambar 2.10 (a) Rotor Belitan, (b) Konstruksi Motor Induksi Tiga Phasa dengan Rotor Belitan
II.4 Prinsip Kerja Motor Induksi Tiga Phasa
Motor induksi adalah peralatan pengubah energi listrik ke bentuk energi mekanik.
Pengubahan energi ini bergantung pada keberadaan phenomena alami magnetik, medan listrik,
gaya mekanis dan gerak.
Dalam motor induksi, tidak ada hubungan listrik ke rotor, arus rotor merupakan arus
induksi. Tetapi ada kondisi yang sama seperti motor dc, dimana pada rotor mengalir arus. Arus
ini berada dalam medan magnetik sehingga akan terjadi gaya (F) pada rotor yang akan
menggerakkan rotor dalam arah tegak lurus medan.
Jika pada belitan stator diberi tegangan tiga phasa, maka pada stator akan dihasilkan arus
tiga phasa, arus ini menghasilkan medan magnetik yang berputar dengan kecepatan sinkron.
Ketika medan melewati konduktor rotor, dalam konduktor ini diinduksikan ggl yang sama
Rangkaian rotor merupakan rangkaian tertutup, baik melalui cincin ujung atau tahanan luar, ggl
induksi menyebabkan arus mengalir dalam konduktor rotor. Jadi arus yang mengalir pada
konduktor rotor dalam medan magnet yang dihasilkan stator akan menghasilkan gaya (F) yang
bekerja pada rotor.
Gambar – 2.14 di bawah ini menggambarkan penampang stator dan rotor motor induksi,
dengan medan magnet diumpamakan berputar searah jarum jam dan dengan statornya diam
seperti pada saat start.
X X
X
X X X
X
Stator
Rotor
Gerakan medan magnet berputar
Gambar 2. 11. Penampang stator dan motor
Untuk arah fluksi dan gerak yang ditunjukkan gambar di atas, penggunaan aturan tangan
kanan fleming bahwa arah arus induksi dalam konduktor rotor menuju pembaca. Pada kondisi
seperti itu, dengan konduktor yang mengalirkan arus berada dalam medan magnet seperti yang
ditunjukkan, gaya pada konduktor mengarah ke atas karena medan magnet di bawah konduktor
lebih kuat dari pada medan di atasnya. Agar sederhana, hanya satu konduktor rotor yang
diperlihatkan. Tetapi, konduktor – konduktor rotor yang berdekatan lainnya dalam medan stator
juga mengalirkan arus dalam arah seperti pada konduktor yang ditunjukkan, dan juga
berikutnya, arah medan stator akan dibalik, tetapi arus rotor juga akan dibalik, sehingga gaya
pada rotor tetap ke atas. Demikian pula konduktor rotor di bawah kutub – kutub medan stator
lain akan mempunyai gaya yang semuanya cenderung memutarkan rotor searah jarum jam. Jika
kopel yang dihasilkan cukup besar untuk mengatasi kopel beban yang menahan, motor akan
melakukan percepatan searah jarum jam atau dalam arah yang sama dengan perputaran medan
magnet stator.
Untuk memperjelas prinsip kerja motor induksi tiga phasa, maka dapat dijabarkan dalam
langkah – langkah berikut:
1. Pada keadaan beban nol ketiga phasa stator yang dihubungkan dengan sumber tegangan tiga
phasa yang setimbang menghasilkan arus pada tiap belitan phasa.
2. Arus pada tiap phasa menghasilkan fluksi bolak-balik yang berubah-ubah.
3. Amplitudo fluksi yang dihasilkan berubah secara sinusoidal dan arahnya tegak lurus terhadap
belitan phasa.
4. Akibat fluksi yang berputar timbul ggl pada stator motor yang besarnya adalah:
e1 =
dt d N Φ
− 1 ( Volt )
atau E1 =4,44fN1Φ ( Volt ).
5. Penjumlahan ketiga fluksi bolak-balik tersebut disebut medan putar yang berputar dengan
kecepatan sinkron ns, besarnya nilai ns ditentukan oleh jumlah kutub p dan frekuensi stator f
yang dirumuskan dengan
p f
ns =120× ( rpm ).
6. Fluksi yang berputar tersebut akan memotong batang konduktor pada rotor. Akibatnya pada
E2 =4,44fN2Φm ( Volt )
dimana :
E2 = Tegangan induksi pada rotor saat rotor dalam keadaan diam (Volt)
N2 = Jumlah lilitan kumparan rotor
Фm = Fluksi maksimum (Wb)
7. Karena kumparan rotor merupakan rangkaian tertutup, maka ggl tersebut akan menghasilkan
arus I2
8. Adanya arus I2 di dalam medan magnet akan menimbulkan gaya F pada rotor
9. Bila kopel mula yang dihasilkan oleh gaya F cukup besar untuk memikul kopel beban, rotor
akan berputar searah medan putar stator
10.Perputaran rotor akan semakin meningkat hingga mendekati kecepatan sinkron. Perbedaan kecepatan medan stator (ns) dan kecepatan rotor (nr) disebut slip (s) dan dinyatakan dengan
100% s
r s − × =
n n n s
11.Pada saat rotor dalam keadaan berputar, besarnya tegangan yang terinduksi pada kumparan
rotor akan bervariasi tergantung besarnya slip. Tegangan induksi ini dinyatakan dengan E2s
yang besarnya:
E2s = 4,44sfN2Φm ( Volt )
dimana
E2s = tegangan induksi pada rotor dalam keadaan berputar (Volt)
f2 = s.f = frekuensi rotor (frekuensi tegangan induksi pada rotor dalam keadaan berputar)
12.Bila ns = nr, tegangan tidak akan terinduksi dan arus tidak akan mengalir pada kumparan
BAB III
PERANCANGAN MOTOR INDUKSI 3 PHASA 90 kW
Daya 100 kW digunakan untuk motor induksi berdaya kecil dan menengah. Pada
umumnya motor induksi berdaya 100 kW menggunakan stator tunggal dan mempunyai celah
sebagai ventilasi masuknya udara ke badan motor. Biasanya mempunyai rotor yang terbuat dari
alluminium dan mempunyai belitan stator yang terbuat dari konduktor magnetik dengan 1 sampai
6 konduktor utama ( diameter lebih kecil dari 2,5 mm) yang paralel bergantung dari jumlah pasang
kutub.
Motor induksi dengan daya dibawah 100 kW sangat umum dipasarkan dalam dunia
industri. Didesain untuk standard atau efisiensi tinggi membutuhkan gabungan antara seni dan
ilmu pengetahuan, khususnya dalam tahap optimalisasi mesin.
III.1 Algoritma Desain
Tahap utama dalam desain motor induksi ditunjukkan di bawah. Proses desain dimulai
dari proses dengan mendesain spek yang dibutuhkan dan menentukan kerapatan fluks dan
kerapatan arus sehingga dapat menentukan diameter stator, panjang stack, slot stator dan diameter
luar stator. Setelah besar arus stator dan rotor ditemukan, dapat ditentukan slot rotor, dan ukuran
rotor sangkarnya.
Semua dimensi yang diperoleh harus disesuaikan dengan standard yang telah ada
(seperti diameter luar stator, ukuran belitan stator, dll). Lalu pada tahap akhir pembebanan elektris
III.2 MERANCANG PARAMETER STATOR
Pada tahap ini akan digunakan persamaan diameter stator
3
0 1 1)
( 2
C f
S p p
Dis gap
πλ
=
(3.1)
dimana
p = p1 = jumlah kutub
Sgap= Daya celah udara (VA)
f1= frekuensi mesin (Hz)
C0=Faktor utilisasi yang dapat ditentukan dengan gambar di bawah ini
Sgap dapat ditentukan dengan
η = Efisiensi yang diharapkan
n
1
cosθ = Faktor daya yang diharapkan
Rasio faktor stack λdapat ditentukan dengan
τ
Dari pengalaman, nilai λdapat ditentukan dari tabel berikut
Jumlah slot pitch τsadalah
Pada umumnya semakin besar nilai q akan memberikan performansi mesin yang lebih baik
seperti rugi rugi yang lebih kecil
Dari pengalaman, bahwa rasio diameter luar dan diameter dalam stator diberikan pada tabel di
bawah
Tabel 3.2 Rasio diameter luar dan diameter dalam stator
Untuk menentukan celah udara, dapat ditentukan dengan persamaan berikut
(
P)
mIII.3 MERANCANG BELITAN STATOR
Jumlah slot stator Ns dapat ditentukan dengan
qm p Ns =2 1
(3.7)
m = Jumlah phasa
q = bilangan asli ( 1,2,3,....) atau pecahan
nilai q pada umumnya bilangan asli
Gambar 3.2 Konstruksi belitan
untuk lapis tunggal y=τ, sedangkan untuk banyak lapis diperbolehkan y <τ
Sudut elektris antara emf dan slot slot yang berdekatan adalah αec dimana
s ec
N p1
2π
α = derajat (3.8)
Dimana :
Gambar 3.3 Hubungan slot motor 3 phasa , 2 kutub, 12 slot
Zone factor Kq1 dapat ditentukan dengan
q
Chording factor dapat ditentukan dengan
τ
= faktor paduan belitan berlapis
Faktor belitan stator dapat ditentukan
1
g
LB
τ α
φ = 1 (3.12)
dimana Bg = Kerapatan fluks pada celah udara
Bg yang disarankan adalah
Bg = (0,5-0,75) T untuk 2p1= 2
Bg = (0,65-0,78) T untuk 2p1= 4
Bg = (0,7-0,82) T untuk 2p1= 6
Bg = (0,75-0,85) T untuk 2p1= 8
danα1=faktor bentuk rapat fluks, yang dapat ditentukan dengan grafik di hubungan kf dan 1+Ksd
Gambar 3.4 Grafik di hubungan kf dan 1+Ksd
Jumlah belitan perphasa dapat ditentukan dengan
φ
Jumlah konduktor per slot ns dapat ditentukan dengan
q
dimana a1 adalah jumlah current path yang terhubung paralel
nilai n yang diperoleh haruslah bilangan genap, bila bilangan pecahan maka harus s
digenapkan sehingga harus dihitung kembali Bg yang sebenarnya.
Arus rated dapat diperoleh dengan
1
Sehingga dapat ditentukan konduktor yang digunakan untuk motor ini, dimana kerapatan arus
konduktor yang direkomendasikan adalah
J = ( 5-8) A/mm2 untuk 2p1 = 6,8
Belitan magnetik dapat ditentukan dengan
1 1
Ja I ACo = n ,
πCO
Co
A d = 4
(3.16)
n
I1 = Arus rated
J = Kerapatan arus, a1 = Jumlah current path yang terhubung paralel
Ukuran konduktor harus disesuaikan dengan tabel standard konduktor berikut
III.4 PERANCANGAN SLOT STATOR
Seperti yang kita ketahui, jumlah lilitan perslot ns dan jumlah konduktor yang terpasang
paralel ap dengan diameter konduktor dCO,dapat ditentukan area slot Asu
sehingga kita harus menentukan faktor isi slot (Kfill). Untuk konduktor bulat, Kfiill bernilai 0,35
sampai 0,4 untuk motor dibawah 10 kW dan 0,4 sampai 0,44 untuk motor diatas 10 kW
Bentuk stator yang umumya digunakan adalah bentuk trapezoidal dan bentuk semi
melingkar
a. Trapezoidal b. Semi melingkar
Gambar 3.5 Bentuk slot yang sering digunakan
Gambar 3. 6 Gambar Slot Dirancang
Variabel bos, hos dan hw ditentukan dari pengalaman dimana biasanya ; bos = 2 s/d 3 mm, hos = 0,5
s/d 1 mm, hw = 1 s/d 4 mm. Asumsi bahwa semua fluks mencapai stator, sehingga
Fe ts ts s
g L B b LK
B τ ≈
(3.17)
Bg = Kerapatan fluks pada celah udara
s
τ = Jumlah slot pitch
L = Panjang Stack
dengan Bts = 1,5 - 1,65 T, dari persamaaan BgτsL≈BtsbtsLKFe sehingga dapat ditentukan nilai
bts. Dengan pembatasan ketebalan yang tidak boleh melebihi 3,5 x 103 m.bs1 dapat ditentukan
dengan rumus
ts
D = diameter dalam stator
hos = panjang bagian stator seperti pada gambar 3.6
hw = panjang bagian stator seperti pada gambar 3.6
ts
b = panjang bagian stator seperti pada gambar 3.6
Ns = Jumlah slot stator
Luas daerah Asu dapat dinyatakan dengan
2
dan nilai bs2 dapat dinyatakandengan
Dari 2 persamaan diatas, nilai bs2 dan hs yang akan dicari dapat dihitung dengan
dan hs dapat dihitung dengan
2
Proses selanjutnya adalah menghitung faktor saturasi 1+ Kst dengan menganggap bahwa stator
dan rotor menghasilkan efek yang sama
mg
Bg = kerapatan fluks pada celah udara
dari tabel 3.2 dapat dicari nilai Bts dan Hts sebagai pertimbangan dalam penentuan Fmts
(mmf gigi stator) dengan rumus
)
( s os w
ts
mts H h h h
F = + + (3.25)
Tabel 3.4 Kurva Magnetisasi Bm (Hm)
Dari persamaan 3.20 dapat dihitung nilai mmf gigi rotor mmf Fmtr yang nilainya mendekati 1+Kst
= 1,4
mts mg st
mtr K F F
F = −
Jika nilai Fmtr yang diperoleh selisihnya kecil dibandingkan dengan gigi stator, maka
proses perhitungan desain dapat dilanjutkan, akan tetapi jika Fmtr <<Fmts
(atau negatif) maka dari persamaan 3.24 untuk nilai 1+Kstyang diberikan, kita memerlukan nilai Bg yang lebih kecil. Akibatnya, kita harus kembali ke persamaan 3.9. Iterasi yang dilakukan
adalah ketika Fmtr ≈Fmts.
Oleh karena diameter luar stator telah dihitung sebelumnya pada persamaan 3.1, maka
dapat dihitung tinggi stator (stator back iron) sebagai berikut
2
Kerapatan fluks pada inti Bcs dapat dihitung dengan
cs
III.5 PERANCANGAN SLOT ROTOR
Dalam memilih jumlah slot rotor harus diingat persyaratan bahwa slot rotor harus
berkisar 15 – 30 % lebih besar atau lebih kecil dari slot stator.
Dan juga untuk mengurangi getaran dan suara berisik (vibration and noise ) maka selisih jumlah
2
Dimana p merupakan jumlah kutub, dengan mengingat hal - hal di atas, maka ;
Slot rotor dipilih dengan persamaan
2
P S Sr = s −
(3.29)
Dimana Ss adalah jumlah slot stator, sehingga slot stator perkutub perphasa adalah
p
Kisar slot rotor (rotor slot pitch) teoritis tanpa memperhitungkan winding factor stator adalah :
r
Arus ekivalen stator dapat dihitung dengan
ϕ
Ampere Turn pada rotor dihitung dengan
Ms = Jumlah slot pada stator , Mr = Jumlah slot rotor
Kws = Efek pada stator Kwr = Efek pada rotor
Ts = Emf pada stator Tr = Emf pada rotor
Dengan telah didapatnya jumlah slot stator, maka besar arus yang mungkin pada rotor bar dapat
dihitung dengan
φ
cos 2
S r
s WS s
b I
S T K m
I = × × ×
(3.34)
Dalam memperhitungkan luas penampang konduktor, tentunya luas penampang konduktor
dipengaruhi oleh kerapatan arus yang timbul pada konduktor rotor. Menurut teori, bahwa
kerapatan arus pada rotor berkisar 4 – 7 Ampere/mm2.
III.6 PERANCANGAN GIGI SLOT ROTOR (ROTOR TEETH)
Dengan berdasarkan ukuran penampang slot bar di atas, maka dapat ditentukan
a. Tinggi slot stator
Untuk mempertimbangkan tinggi slot rotor harus ditambahkan ketinggian dor , dir dan
juga clearance antara rotor bar dan rotor core. Menurut teori, bahwa besarnya clearance antara
b. Lebar slot rotor
Juga harus ditambahkan clearance antara rotor bar dan rotor core. Tetapi sebelum
menentukan ukuran slot rotor, harus dipertimbangkan juga kerapatan fluksi pada bagian slot
rotor yaitu dengan langkah- langkah sebagai berikut :
Kisar slot (slot pith) bila diperhitungkan pengaruh winding factor stator adalah
r
Kws = Winding faktor
Kerapatan fluksi dapat dihitung dengan
tr
φ = fluks maksimum rotor
Sr = Slot rotor
III.7 PERANCANGAN TERAS ROTOR
Karena celah udara antara stator dan rotor sedemikian kecilnya, maka depth of rotor core (dcr)
dapat dianggap sama dengan depth of stator core (dcs)
Dengan demikian diameter dalam rotor (rotor stamping) adalah
Di = Dr -2 dsr -2 dcr
(3.37)
Menghitung End Ring
Arus yang mengalir pada end- ring dihitung dengan rumus
p I S
I r b
π
× =0 (3.38)
BAB IV
PERHITUNGAN RANCANGAN MOTOR INDUKSI 3 PHASA 90 kW
IV.1 UMUM
Sebagaimana yang telah dipaparkan dalam bab 3, mengenai prosedur perancangan motor
3 phasa, maka pada bab ini akan dihitung rancangan parameter parameter dan performansi
motor 3 phasa yang diharapkan. Maka dari itu motor yang akan dirancang adalah sebagai berikut
Daya 90 kW, 3 phasa, 1 pasang kutub, Frekuensi sumber 50 Hz, tegangan 460/380,
hubungan bintang, faktor daya yang diharapkan 0,9, efisiensi yang diharapkan adalah 90 persen,
IV.2 ANALISIS PARAMETER STATOR
Dari persamaan 3. 2, bahwa koefisien emf KE dapat ditentukan dengan
p
S dapat ditentukan,
Dari gambar 3.1 dapat ditentukan nilai C0 =230 x 103 J/m3 .dan dari tabel 3.1 nilai λ diambil
1,5, sehingga nilai Dis dari persammaan 3.1 dapat dihitung sebagai berikut
(
)
Panjang Stack L dari persamaan 3.3 adalah
Pole pitch (kisar kutub ) dihitung dengan persamaan 3.3.
5
Jumlah slot perkutub yang dirancang adalah 3(q=3), maka panjang slot pitch setiap kutub adalah
=
Dari tabel 3.2 maka dapat dipilih perbandingan Dis dengan Dout , sesuai dengan spek motor yang
Sehingga
Maka dari itu dapat ditentukan besar celah udara yang optimal, dari persamaan 3.6
(
P)
mIV.3 ANALISIS RANCANGAN BELITAN STATOR
Dari persamaan 3.7 , dengan mengambil q = 3, maka
qm p Ns =2 1
=2(2)3(3)=36
Karena yang dirancang adalah Belitan 2 layer (lapis) kta ambil τ =79
y dibulatkan menjadi 0,8.
Besar sudut elektris antara mmf dan slot yang berdekatan adalah
Oleh karena jumlah slot total adalah 36, maka jumlah slot perkutub adalah 18, sehingga
terdapat 18 anak panah dan distribusi slot untuk tiap phasa adalah sebagai berikut.
Gambar 4.1. Belitan 3 phasa dengan 36 slot, 2 kutub, 2 layer
Zone factor dapat K ditentukan dengan q1
1
q
K 0,9598 )
3 ( 6 sin 3
6 sin
=
= π
Chording factor dapat ditentukan dengan
Faktor belitan stator dapat ditentukan
9019
Jumlah belitan perphasa ditentukan berdasarkan fluksi φ
g
(1+Kst), bergantung pada bahan yang digunakan, dengan memasukkan nilai 1+Kst = 1,5, sehingga
dari gambar 3.4 maka diperoleh dengan αi = 0,74 dan Kf = 1,08. Sehingga dari persamaan 3. 12
diperoleh
g
Jumlah belitan perphasa W1 dapat dihitung dengan
)
Jumlah konduktor perslot ns ditentukan dengan persamaan 3.14, dimana jumlah current path
Nilai ns yang diambil adalah hasil pembulatan, sehingga ns =14, sehingga harus kembali ke
persamaan 3.14 untuk menghitung W1 sebenarnya
asa lilitperph qn
p
W1 = 1 s =84
sehingga harus dihitung kembali kerapatan fluks celah udara (Bg) yang sebenarnya
84
Arus nominal motor dapat dihitung dengan
Untuk menentukan ukuran konduktor, maka dipilih tingkat kerapatan arus konduktor. Dalam hal
ini dipilih J = 4,3 (semakin kecil kerapatan arus, maka effisiensi mesin semakin tinggi)
dengan menggunakan persamaan 3.16, maka
1
Dengan demikian diameter konduktor nominal adalah 7,07 mm
IV.4 PERANCANGAN UKURAN SLOT STATOR
Oleh karena telah diketahuinya jumlah lilitan untuk tiap slot dan diameter kabel yang
digunakan, maka kita dapat menghitung luas area slot yang dipengaruhi oleh faktor pengisian
(Kfill).
Untuk konduktor bulat, Kfiill bernilai 0,35 sampai 0,4 untuk motor dibawah 10 kW dan
0,4 sampai 0,44 untuk motor diatas 10 kW (dalam hal ini diambil Kfill = 0,44)
Luas slot stator adalah
Bentuk slot yang digunakan adalah bentuk trapezoidal
Gambar 4.2 Bentuk Slot Trapezoidal
Variabel bos, hos, dan hw ditentukan dari pengalaman dimana biasanya ; bos= 2 sampai 3 mm,
untuk perancangan mesin diambil nilai 3 mm, oleh karena motor yang dirancang relatif besar,
sehingga struktur geometri yang dipakai adalah yang besar juga, hos = 1 mm, hw= 4 mm. Asumsi
bahwa semua fluks mencapai stator, sehingga dari persamaan 3.17 bahwa
Fe
T) maka dari persamaan 3.17, maka
Sesuai dengan pengalaman, bahwa ketebalan gigi stator (bos +hos +hw ) tidak boleh
bs1 dapat dihitung dari persamaan 3. 18 sebagai berikut
bs2 dapat dihitung dengan persamaan 3.21
2
Dari persamaan 3. 19 Luas daerah hs dapat dinyatakan dengan
m
Celah udara mmf Fmg dihitung dengan
Aturns
(mmf gigi stator ) dengan rumus
Dari persamaan 3.23 dapat dihitung Fmtr , untuk 1+Kst = 1,5
Tinggi stator (back iron stator) sebagai berikut
2
IV.5 ANALISIS PERANCANGAN SLOT ROTOR
Seperti pada persamaan 3.29, maka slot rotor yang dipilih
2
Sehingga, jumlah slot perphasa perkutub adalah
Kisar slot rotor (rotor slot pitch) teoritis tanpa memperhitungkan pengaruh winding factor stator
IArus ekivalen stator dapat dihitung dengan
ϕ
Ampere Turn pada rotor dapat dihitung dengan
IV.6 ANALISIS RANCANGAN ROTOR BAR CURRENT
Dengan telah diperolehnya jumlah slot stator, maka besar arus yang mungkin pada rotor bar
sama dengan jumlah ampere turn pada rotor.
φ
Dalam memperhitungkan luas penampang konduktor, tentunya dipengaruhi oleh kreapatan arus
yang timbul pada konduktor rotor. Dan menurut teori, bahwa kerapatan arus pada rotor bar
berkisar 4-7 ampere/mm2. Diambil kerapatan arus = 4,3 A/mm2. Maka luas masing masing rotor
bar adalah
2
Dari luas rotor ini, maka cross section dari rotor bar dapat dipilih 20 mm x 21 mm, untuk motor
induksi biasanya dibuat tidak sejajar dengan alur stator. Hal ini dibuat untuk menghindarkan
pulsasi antara slot stator dan slot rotor, yang dapat menambahkan rugi rugi inti. Untuk mengatasi
hal hal di atas maka alur dari rotor harus dibuat tidak sejajar. Dengan pemasangan demikian,
pada ujung kedua rotor bar masing masing terjadi pertambahan panjang 3,1 cm terhadap inti
IV.7 ANALISIS RANCANGAN GIGI SLOT ROTOR
Dipilih besarnya clearance antara rotor bar dan rotor core 0,2 mm, d0r = 2 mm, dir = 2
mm, maka tinggi slot rotor (depth of rotor slot) :
dsr =21+0,2+2+2=25,2 mm
Lebar slot rotor = 20+0,2=20,2 mm
Jadi ukuran slot rotor adalah 25,2 x 20,2 mm2
Slot pitch bila diperhitungkan pengaruh winding factor stator, adalah
r
IV.8 ANALISIS RANCANGAN TERAS ROTOR (ROTOR CORE)
Karena celah udara antara stator dan rotor sedemikian kecilnya, maka depth of rotor core
(dcr ) dapat dianggap sama dengan depth of stator core (dcs),
Maka , dcr = 30 mm
IV.9 ANALISIS RANCANGAN END RING
Arus yang mengalir pada end ring dihitung dengan rumus :
A Ie 10.154
2 14 , 3
1822 35
= × × =
Dengan kerapatan arus 4,3 A/mm2, maka luas end ring adalah
2
2361 3
, 4 10154
mm
A= =
Diambil A= 2360 mm2
Dengan harga ini, kita dapat memilih ukuran end ring yaitu 40 mm x 59 mm, dimana ukuran
yang diambil mendekati harga (luas) berdasarkan perhitungan.
Jadi Tebal ring (te) = 40 mm = 4 cm
Tinggi ring (de) = 59 mm = 5,9 cm, dibulatkan ke 6 cm
Jadi diameter luar end ring = Dr - 2x dsr
= 35,3 cm – 2(25,2 mm)= 30,3 cm
Jadi diameter dalam end ring = 30,3 cm -2 (de)
= 30,3 cm - 2(6 cm)=17,7 cm
BAB V
KESIMPULAN DAN SARAN
V.1 KESIMPULAN
Untuk rancangan motor yang berspesifikasi
Daya 90 kW, 3 phasa, 1 pasang kutub, frekuensi sumber 50 Hz, tegangan 460/380, hubungan bintang, faktor daya yang diharapkan 0,9, efisiensi yang diharapkan adalah 90 persen, ditentukan bahwa
1. Elektris
Arus rated motor adalah 169 A.
Kerapatan fluks pada celah udara = 0, 68 Tesla/ mm kubik Fluks yang dihasilkan pada stator = 0,00229 Weber
Besar AmpereTurn pada stator adalah 409 AT 2 Untuk stator
Panjang stack = 257,8 mm
Pole pitch tiap kutub = 17,19 mm
Diameter luar = 353 mm
Celah udara = 6,3 mm
Luas (trapezoidal) = 1189 mm2
Dimana
mm
bts =8,5 bos =26,2mm hos =12mm hw =0,36mm mm
bs1 =10 hs =400mm Dis =219mm mm
bos =2
4 Rotor
Rotor Slot pitch = 31 mm
Luas rotor bar = 424 mm2 (20 mm x 21 mm)
Depth of rotor slot = 25,2 mm
Lebar slot rotor = 20,2 mm
Lebar rotor teeth = 9,8 mm
Panjang inti rotor = 242 mm
Ukuran endring = 40 x 59 mm
Diameter luar end ring = 303 mm
Diameter luar end ring = 177 mm
V.2 SARAN
DAFTAR PUSTAKA
1. Bimbra, P.S., Dr., “Electrical Machinery”, Jilid IV, Delhi : Goel Offset Press, 1990
2. Boldea, Ion. “ Induction Machine Handbook “. CLC Press LLC, New York .2002
3. Chapman, Stephen J. “ Electric Machinery Fundaments”EEEB344 Electromechanical
Devices, New York
4. Guru, S. Bhag. “ Electric Mchinery and Transformer”. Oxford University Press, New
York.2001
5. Sibal, M. K .” Design of Induction Motor Squirrel Cage Type”. Khanna Publisher,1970