TUGAS AKHIR
ANALISIS KARAKTERISTIK TORSI-PUTARAN PADA
MOTOR SINKRON TIGA PHASA
(Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU)
Diajukan untuk memenuhi salah satu persyaratan dalam menyelesaikan
pendidikan sarjana (S-1) pada Departemen Teknik Elektro
Oleh :
ERY BRENDY GINTING
(030402039)
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
ABSTRAK
Motor sinkron (motor arus bolak-balik) adalah suatu mesin yang berfungsi
mengubah energi listrik arus bolak-baik (AC) menjadi energi gerak atau mekanik
berupa putaran rotor. Motor arus bolak-balik terdiri dari dua bagian yaitu bagian
yang diam (stator) dan bagian yang bergerak (rotor).
Jika dibandingkan antara motor induksi dan motor sinkron, terdapat
perbedaan yang sangat prinsipil pada karakteristik berbeban pada kedua jenis
motor ini. Pada motor induksi, penambahan beban akan menyebabkan kecepatan
putar motor akan berkurang. Berkurangnya kecepatan mengurangi GGL lawan
sehingga tambahan arus akan ditarik dari sumber untuk menggerakkan beban
yang bertambah agar kecepatan putar kembali seperti semula.
Pada motor sinkron, hal ini tidak terjadi karena ketika masih bekerja maka
rotor motor sinkron akan selalu terikat atau terkopel secara magnetis dengan
medan putar dan dipaksa untuk turut berputar dengan kecepatan sinkronnya.
Dengan demikian, penambahan beban tidak berpengaruh terhadap putaran motor.
Namun jika penambahan beban melebihi batas kekuatan kopel rotor dan medan
putar stator maka rotor motor akan berhenti bekerja.
Dalam tugas akhir ini akan dibuktikan perubahan beban pada motor
sinkron tiga phasa tidak akan mempengaruhi putaran rotornya selama rotor masih
KATA PENGANTAR
Segala Puji Syukur Kepada Bapa di Surga atas Cinta Kasih, Anugrah dan
Berkat yang tak terbatas bagi penulis sehingga bisa menyelesaikan Tugas Akhir
ini. Adapun tujuan penulisan Tugas Akhir ini adalah untuk memenuhi syarat
kurikulum Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera
Utara dalam menyelesaikan program studi Strata Satu (S-1).
Selama masa kuliah sampai penyusunan TugasAkhir ini, penulis banyak
memperoleh bimbingan dari berbagai pihak. Oleh karena itu, dengan segala
ketulusan dan kerendahan hati penulis mengucapkan terima kasih kepada :
1. Kedua Orang Tua Penulis, Radium Ginting dan Wardani Kacaribu, Kakak
Penulis (Erim Nisa Br. Ginting, ST), Adik Penulis (Wiro Lija Ginting dan
Ruth Erlikasna Br. Ginting) atas segala kesabaran, dukungan dan
doa-doanya.
2. Elisa Marcelina Sinulingga (Tambaten Pusuhku) atas Doa dan
Dukungannya.
3. Bapak Ir. Djendanari Sembiring selaku Dosen Pembimbing Penulis yang
telah banyak membantu penulis Tugas Akhir ini.
4. Bapak Ir. Natsir Amin, MM selaku Dosen Wali Penulis yang telah banyak
membimbing dan membantu selama masa kuliah sampai penyusunan
5. Bapak Prof. DR. Ir. Usman Baafai, selaku Ketua Departemen Teknik
Elektro Fakultas Teknik, Universitas Sumatera Utara.
6. Bapak Drs. Hasdari Helmi, MT, selaku Sekretaris Departemen Teknik
Elektro, Fakultas Teknik, Universitas Sumatera Utara.
7. Bapak Ir. Mutafrind Lubis, selaku Kepala Laboratorium Konversi Energi
Listrik FT USU.
8. Seluruh keluarga (Pak Tengah, Pak Uda, Bik Tua, Bik Tengah, Bik Uda)
yang ada di Medan dan di Jakarta, terkhusus buat Pak Tengah dan Nande
Tengah di Simpang Simalingkar, Medan atas segala dukungan dan
bantuan terhadap penulis mulai sejak kuliah sampai penyususnan Tugas
Akhir ini
9. Marlen Siagian (TE’03) dan Henry Siregar (TE’03) atas segala inspirasi
dan dukungan yang kalian berikan mulai dari penyusunan Tugas Akhir ini
sampai selesai.
10.Ronal (TE’04/Asisten Laboratorium Konversi) atas segala bantuannya.
11.Teman-teman di ”Apartemen Kudus Gang Bersma Indah” (Nando TE’04,
Ranto TE’04, Leo TE’04, Nando Harianja) atas segala dukungan dan
semangat yang diberikan kepada Penulis.
12.Seluruh rekan-rekan Teknik Elektro’03 yang tak dapat disbutkan satu per
satu.
13.Seluruh rekaan-rekan pengurus IMTE Periode 2007
14.Teman-teman di KMK St. Yoseph, Eng Fakultas Teknik USU atas segala
15.Teman-teman di KMK St. Albertus Magnus USU dan teman-teman
TIMKOOR ke XIV (K’Mewi, Tika, Lala).
16.Teman-teman di IMKA Pande Kaliaga Fakultas Teknik USU
17.Kelurga Ir. E. Ginting yang telah mempercayakan Penulis mengajar
Putra-Putrinya (Billy, Uun, Rio) selama 3 tahun serta dukungan moril dan
materil.
Penulis sangat menyadari bahwa Tugas Akhir ini masih banyak
kekurangannya. Untuk itu, dengan penuh kerendahan hati, Penulis mengharapkan
saran dan kritik dari Pembaca untuk melengkapi Tugas Akhir ini.
Akhirnya saya berharap agar Tugas Akhir ini bermanfaat bagi kita semua.
Medan, 1 Desember 2007
DAFTAR ISI
Abstrak...i
Kata Pengantar...ii
Daftar Isi...v
Daftar Gambar...viii
BAB I PENDAHULUAN I.1. Latar Belakang...1
I.2. Tujuan Penulisan...2
I.3. Manfaat Penulisan...2
I.4. Batasan Masalah...2
I.5. Metodologi Penelitian...3
I.6. Sistematika Penulisan...3
BAB II MOTOR SINKRON TIGA PHASA II.1. Umum...6
II.2. Konstruksi Motor Sinkron Tiga Phasa...6
II.3. Rangkaian Ekivalen...9
II.4. Prinsip Kerja...12
II.5. Metode Menjalankan Motor Sinkron...17
II.5.1. Starting Motor Sinkron Dengan Penggerak Mula...18
II.5.2. Starting Motor Sinkron Dengan Mereduksi Frekwensi...18
II.6. Pengaruh Kenaikan Beban Dengan Eksitasi Konstan...20
II.7. Pengaruh Perubahan Eksitasi Pada Faktor Daya...22
BAB III KARAKTERISTIK TORSI-PUTARAN PADA MOTOR SINKRON TIGA PHASA III.1. Umum...25
III.2. Pengaruh Perubahan Beban Pada Motor Sinkron ...25
III.3. Kurva Karakteristik Torsi-Putaran Pada Motor Sinkron...28
BAB IV ANALISIS KARAKTERSITIK TORSI-PUTARAN PADA MOTOR SINKRON TIGA PHASA IV.1. Umum...31
IV.2. Peralatan Yang Digunakan...31
IV.3. Percobaan Motor Sinkron Tiga Phasa...33
IV.3.1. Percobaan Beban Nol...33
IV.3.1.1. Rangakaian Percobaan...33
IV.3.1.2. Prosedur Percobaan...34
IV.3.1.3. Data Hasi Percobaan...34
IV.3.1.4. Analisa Hasil Percobaan...34
IV.3.2. Percobaan Berbeban...35
IV.3.2.1. Rangkaian Percobaan...35
IV.3.2.2. Prosedur Percobaan………....35
IV.3.2.3. Data Hasil Percobaan……….36
BAB V PENUTUP
DAFTAR GAMBAR
Gambar 2.1. Stator...8
Gambar 2.2. Rotor...9
Gambar 2.3. Rangkaian ekivalen motor sinkron tiga phasa...10
Gambar 2.4. Rangkaian ekivalen motor sinkron per phasanya...11
Gambar 2.5. Diagram fasor yang disederhanakan dengan Ra diabaikan...11
Gambar 2.6.a Kumparan a-a, b-b……….13
Gambar 2.6.b Distribusi ia, ib, ic sebagai fungsi waktu……….13
Gambar 2.6.c Arah fluks secara vektoris saat t1...13
Gambar 2.6.d Arah fluks secara vektoris saat t2...13
Gambar 2.6.e Arah fluks secara vektoris saat t3...14
Gambar 2.6.f Arah fluks secara vektoris saat t4...14
Gambar 2.7. Diagram fasor motor sinkron...15
Gambar 2.8. Diagram medan magnet motor sinkron...16
Gambar 2.9. Diagram fasor operasi motor dengan faktor daya leading...21
Gambar 2.10. Pengaruh bertambahnya beban pada operasi motor sinkron...21
Gambar 2.11. Kurva V motor sinkron...23
Gambar 2.12.a Diagram fasor motor sinkron dengan faktor daya lagging...24
Gambar 2.12.b Diagram fasor motor sinkron dengan faktor daya satu...24
Gambar 2.12.c Diagram fasor motor sinkron dengan faktor daya leading...24
Gambar 3.1. Diagram fasor motor sinkron tanpa beban...26
Gambar 3.3. Diagram fasor motor sinkron saat dibebani...26
Gambar 3.4. Karakteristik Torsi-Putaran Motor Sinkron...28
Gambar 4.1. Rangkaian Pengujian Beban Nol...33
Gambar 4.2 Rangkaian pengujian Berbeban...35
BAB I
PENDAHULUAN
1.1.LATAR BELAKANG
Motor arus bolak-balik (motor AC) adalah suatu mesin yang berfungsi untuk
mengubah energi listrik arus bolak-balik menjadi energi gerak atau energi
mekanik berupa putaran rotor. Salah satu jenis motor arus bolak-balik adalah
motor sinkron/serempak tiga phasa. Dikatakan motor sinkron tiga phasa karena
motor ini beroperasi pada sumber tegangan tiga phasa. Dan dikatakan motor
sinkron karena putaran medan stator (medan putar) dan putaran rotor
serempak/sinkron.
Motor sinkron pada pengoperasiannya tidak dapat melakukan start awal (self
starting), oleh karena itu motor sinkron tiga phasa membutuhkan penggerak mula
(prime mover) untuk memutar medan pada stator sampai pada kecepatan putar
medan putar stator.
Pada motor sinkron, perubahan beban tidak mempengaruhi kecepatan putar
motor karena ketika motor masih bekerja maka rotor akan selalu terikat atau
terkopel secara magnetis dengan medan putar dan dipaksa untuk berputar dengan
kecepatan sinkronnya. Karena demikian, motor sinkron biasanya digunakan pada
sistem operasi yang membutuhkan kecepatan konstan dengan beban yang
berubah-ubah. Contohnya Rolling Mills, Mesin Penghancur (Crusher), Pulp
Maka analisis karakteristik Torsi-Putaran pada motor sinkron tiga phasa perlu
dilakukan untuk menunjukkan bahwa motor sinkron tiga phasa adalah pilihan
yang tepat untuk sistem operasi yang membutuhkan kecepatan yang konstan
dengan beban yang berubah-ubah.
1.2.TUJUAN PENULISAN
Tugas akhir ini bertujuan untuk menganalisa karakteristik berbeban dari
motor sinkron tiga phasa berupa karakteristik torsi-putaran.
1.3.MANFAAT PENULISAN
Manfaat penulisan tugas akhir ini adalah :
1. Menambah pengetahuan dan wawasan bagi penulis tentang motor sinkron
tiga phasa dan hasil penelitian ini dapat digunakan sebagai refrensi dalam
memilih sebuah motor yang sesuai dengan karakteristik beban yang ada.
2. Memberikan informasi secara umum kepada pembaca tentang motor
sinkron tiga phasa.
3.
1.4.BATASAN MASALAH
Untuk menjaga agar pembahasan materi dalam tugas akhir ini lebih terarah
dan maksimal, maka penulis membuat suatu batasan masalah sebagai berikut :
1. Karakteristik motor sinkron tiga phasa yang akan dibahas adalah
karakteristik torsi-putaran
2. Analisa perhitungan berdasarkan peralatan yang tersedia pada
3. Beban yang digunakan pada percobaan pembebanan motor sinkron tiga
phasa ini adalah generator sinkron yang dibebani dengan beban yang
berubah-ubah
4. Tidak membahas mengenai pengaturan kecepatan motor sinkron
5. Tidak membahas rugi-rugi motor sinkron tiga phasa
1.5.METODE PENELITIAN
Metode yang digunakan dalam penulisan tugas akhir ini adalah :
1. Studi Literatur
Berupa studi kepustakaan dan kajian dari berbagai sumber pustaka yang
relevan mendukung dalam penulisan tugas akhir ini
2. Studi Laboratorium
Melakukan percobaan di laboratorium untuk mendapatkan data-data yang
diperlukan
3. Studi Bimbingan
Dalam hal ini penulis melakukan diskusi tentang topik tugas akhir ini
dengan dosen pembimbing yang telah ditunjuk oleh pihak Departemen
Teknik Elektro USU, dengan dosen-dosen bidang Konversi Energi Listrik,
asisten Laboratorium Konversi Energi Listrik dan teman-teman sesama
mahasiswa.
1.6.SISTEMATIKA PENULISAN
Untuk memudahkan pemahaman terhadap Tugas Akhir ini, maka penulis
BAB I PENDAHULUAN
Bab ini menguraikan latar belakang penulisan , tujuan penulisan,
pembatasan masalah, metodologi penelitian dan sistematika
penulisan.
BAB II MOTOR SINKRON TIGA PHASA
Bab ini menjelaskan teori umum mengenai motor sinkron,
konstruksi motor sinkron tiga phasa, rangkaian ekivalen, prinsip
kerja, metode menjalankan motor sinkron, pengaruh kenaikan
beban dengan eksitasi konstan dan pengaruh perubahan eksitasi
pada faktor daya.
BAB III KARAKTERISTIK TORSI-PUTARAN PADA MOTOR
SINKRON TIGA PHASA
Bab ini membahas tentang kurva karakteristik motor sinkron tiga
phasa dan pengaruh kenaikan beban pada motor sinkron tiga phasa.
BAB IV ANALISIS KARAKTERISTIK TORSI-PUTARAN PADA
MOTOR SINKRON TIGA PHASA
Bab ini berisikan tentang jenis komponen dan spesipikasi peralatan
percobaan, rangkaian percoban, prosedur percobaaan, data
BAB V KESIMPULAN DAN SARAN
Dalam bab ini dituliskan tentang hal-hal yang dianggap penting
BAB II
MOTOR SINKRON TIGA PHASA
II.1. Umum
Motor sinkron tiga phasa adalah motor listrik arus bolak-balik (AC) yang
putaran rotornya serempak/sinkron dengan putaran medan statornya. Sesuai
dengan namanya, motor sinkron tiga phasa beroperasi pada tegangan suplay tiga
phasa yang dihubungkan pada kumparan jangkaran di stator. Selain mendapat
suplai tegangan tiga phasa untuk beroperasi, motor sinkron juga mendapat arus
eksitasi pada kumparan medannya.
Motor sinkron tiga phasa biasanya digunakan sebagai penggerak pada
sistem operasi yang membutuhkan kecepatan konstan dengan beban yang
berubah-ubah. Hal ini disebabkan karena motor sinkron tiga phasa mempunyai
kelebihan pada karakteristik berbeban yang berbeda dengan motor induksi yang
umum digunakan sebagai penggerak pada sistem operasi. Namun motor sinkron
tiga phasa ini juga mempunyai beberapa kekurangan, salah satunya adalah tidak
dapat melakukan start sendiri (self starting).
II.2 Konstruksi Motor Sinkron Tiga Phasa
Pada prinsipnya, konstruksi motor sinkron sama dengan generator sinkron.
Secara umum, konstruksi motor sinkron tiga phasa terdiri dari stator (bagian yang
diam) dan rotor (bagian yang bergerak). Keduanya merupakan rangkaian
Stator
Secara umum stator terdiri dari kerangka stator, inti stator, belitan dan slot.
1. Rangka Stator
Rangka stator berfungsi sebagai tempat melekatya stamping
jangkar dan kumparan jangkar. Pada rangka stator terdapat lubang
pendingin dimana udara dan gas pendingin disirkulasikan. Rangka stator
biasanya dibuat dari besi campuran baja atau plat baja giling yang
dibentuk sedemikian rupa sehingga diperoleh rangka yang sesuai dengan
kebutuhan.
2. Inti Stator
Inti stator melekat pada rangka stator dimana inti ini terbuat dari
laminasi-laminasi besi khusus atau campuran baja. Hal ini diperbuat untuk
memperkecil rugi arus Eddy. Tiap laminasi diberi isolasi dan diantaranya
dibentuk celah sebagai tepat aliran udara.
3. Slot
Slot adalah tempat konduktor berada yang letaknya pada bagian
dalam sepanjang keliling stator. Bentuk slot ada 3 yaitu Slot Terbuka, Slot
Gambar 2.1. Stator
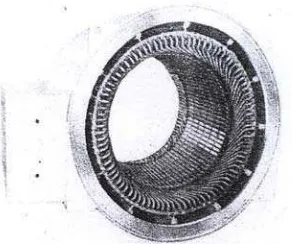
Rotor
Sebagai tempat belitan penguat yang membentuk kemagnetan listrik kutub
Utara-Selatan pada inti rotor. Ada 2 macam bentuk rotor, yaitu :
1. Rotor kutub menonjol (Salient Pole Rotor)
Rotor tipe ini mempunyai kutub yang jumlahnya banyak.
Kumparan dibelitkan pada tangkai kutub, dimana kutub-kutub diberi
laminasi untuk mengurangi panas yang ditimbulkan oleh arus Eddy,
kumparan-kumparan medannya terdiri dari bilah tembaga persegi. Kutub
menonjol ditandai dengan rotor berdiameter besar dan panjang sumbunya
pendek.
2. Rotor kutub tak menonjol (Rotor Silinder)
Rotor tipe ini dibuat dari plat baja berbentuk silinder yang
mempunyai sejumlah slot sebagai tempat kumparan. Karena adanya
slot-slot dan juga kumparan medan yang terletak pada rotor maka jumlah kutub
Rotor ini biasanya berdiameter kecil dan sumbunya sangat panjang.
Konstruksi ini memberikan keseimbangan mekanis yang lebih baik karena
rugi-rugi anginnya lebih kecil dibandingkan rotor kutub menonjol (salient
pole rotor).
Gambar 2.2. Rotor
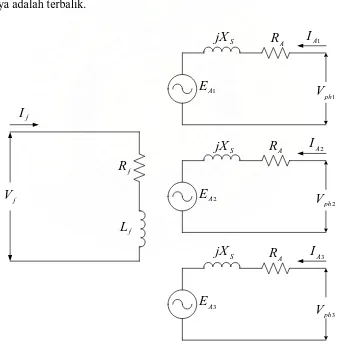
II.3. Rangkaian Ekivalen
Rangakian ekuivalen motor sinkron adalah sama halnya dengan generator
sinkron, kecuali untuk arah aliran dayanya dimana arah aliran daya pada motor
sinkron terbalik dengan arah daya pada generator sinkron. Karena arah aliran daya
ini terbalik, maka arah arus yang mengalir ke stator motor juga akan terbalik.
Dengan demikian, rangkaian ekivalen motor sinkron adalah sama dengan
rangkaian ekivalen generator sinkron, kecuali bahwa refrensi arah IA dibalik.
Rangkaian ekivalennya diperlihatkan pada gambar (2.3) dan rangkaian per
phasanya diperlihatkan pada gambar (2.4). rangkaian ekivalen tiga phasa biasa
Karena perubahan arah IA ini, maka persamaan tegangan menurut hukum
kirrchoof untuk rangkaian ekivalennya juga akan berubah. Jadi persamaan hukum
kirrchoof untuk tegangannya untuk rangkaian ekivalen yang baru adalah :
Vph = EA + j.XS.IA + RA. (Volt)...pers.(2.1)
Jadi persamaan ini sama dengan persamaan generator sinkron, kecuali tanda untuk
arusnya adalah terbalik.
f
V
1 AI
2 AI
3 AI
SjX
SjX
SjX
AR
AR
AR
1 AE
2 AE
3 AE
1 phV
2 phV
3 phV
fR
fL
fI
A
I
S
jX
R
AA
E
phV
fL
fR
fV
Gambar 2.4. Rangkaian ekivalen motor sinkron per phasanya
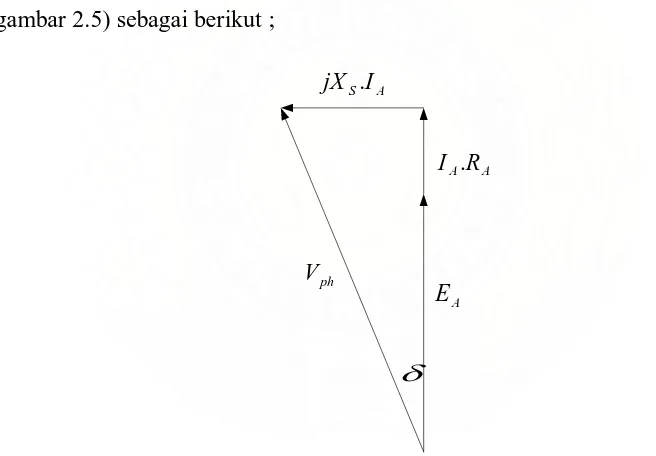
Dari persamaan umum motor sinkron yang dituliskan di dalam persamaan
(2.1) dapat digambarkan diagram fasor motor sinkron seperti ditunjukkan pada
(gambar 2.5) sebagai berikut ;
A E A A R I . A S I jX . ph V
δ
Gambar 2.5. Diagram Fasor Motor Sinkron Dengan Faktor Daya Satu
Keterangan :
EA = Tegangan Jangkar (ggl lawan)
IA = Arus Jangkar
Vph = Tegangan Terminal
XS = Reaktansi Sinkron Motor
Dalam hal ini motor dianggap beroperasi dengan faktor daya satu (unity).
Namun dalam operasi motor sinkron, motor dapat beroperasi dengan factor daya
mendahului (leading) dan tertinggal (lagging) selain dengan faktor daya satu
(unity).
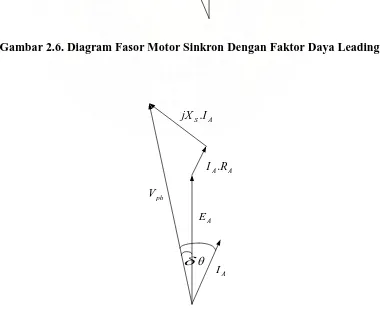
Diagram fasor motor sinkron dengan factor daya mendahului (leading) dan
tertinggal (lagging) ditunjukkan seperti pada gambar (2.6) dan gambar (2.7).
A
E
A A R
I .
A S I
jX .
ph
V
δ
Gambar 2.6. Diagram Fasor Motor Sinkron Dengan Faktor Daya Leading
A
E
A A R
I .
A S I
jX .
ph
V
δ
θ AI
Namun pada kenyataanya, saat motor sinkron dibebani tanpa pengaturan
arus medan, motor sinkron akan beroperasi dengan factor daya tertinggal
(lagging) dan diagram fasornya seperti yang ditunjukkan pada gambar (2.7). Oleh
karena itu, untuk menganalisis motor sinkron digunakan diagram fasor motor
sinkron dengan faktor daya tertinggal (lagging).
Dari diagram fasor motor sinkron didapat daya mekanik (Pmek) motor sinkron
menurut persamaan berikut :
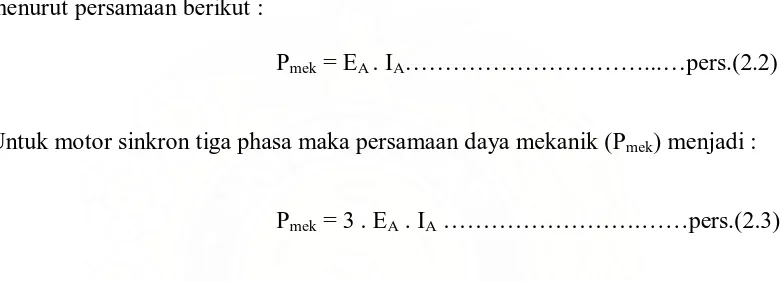
Pmek = EA . IA………...…pers.(2.2)
Untuk motor sinkron tiga phasa maka persamaan daya mekanik (Pmek) menjadi :
Pmek = 3 . EA . IA ……….……pers.(2.3)
Karena tahanan jangkar (RA) motor sinkron biasanya kecil, maka tahanan
jangkar ini biasanya diabaikan. Bila tahanan jangkar (RA) diabaikan (RA<<XS)
maka diagram fasornya menjadi seperti yang ditunjukkan pada gambar (2.8).
A
E
A S I
jX .
ph
V
δ
θ AI
Dari diagaram fasor yang ditunjukkan gambar (2.8) diperoleh :
A S ph Sin X I
V . δ = .
Maka diperoleh S ph A X Sin V
I = . δ ………...pers.(2.4)
Jika persamaan (2.4) disubstitusikan kepersamaan (2.3), maka dperoleh :
S ph A X Sin V E
P= 3. . . δ ………...…pers.(2.5)
II.4. Prinsip Kerja
Pada motor sinkron tiga phasa terdapat 2 sumber tegangan dari luar yaitu
arus bolak-balik (AC) yang dialirkan kebelitan jangkar dan arus searah yang
dialirkan kebelitan medannya. Perputaran rotor diakibatkan karena adanya kopel
magnetik antar medan magnet rotor dan medan putar stator.
Apabila tegangan tiga phasa dihubungkan kekumparan jangkar atau stator
akan menghasilkan arus tiga phasa yang mengalir pada kumparan stator tersebut.
Jika arus tiga phasa (yang berbentuk sinusoidal murni atau saling berbeda sudut
1200 listrik) mengalir pada kumparan stator motor sinkron tiga phasa, maka akan
menghasilkan intensitas medan magnet (HS) yang juga saling berbeda sudut 1200
listrik. Karena kumparan stator mempunyai permeabilitas ( ), maka akan
menghasilkan intensitas medan magnet BS sebesar : BS = .HS
Hal inilah yang disebut dengan medan putar yang timbul pada stator. Timbulnya
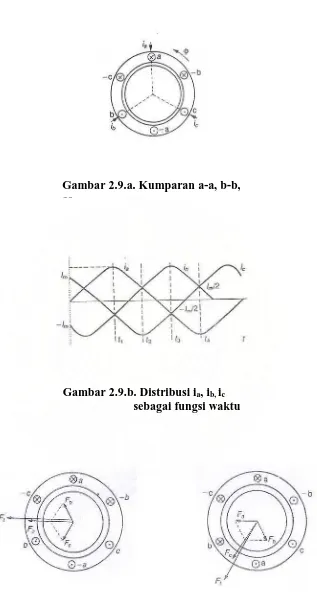
Gambar 2.9.a. Kumparan a-a, b-b, cc
Gambar 2.9.c. Arah fluk secara vektoris saat t1
Gambar 2.9.d. Arah fluk secara vektoris saat t2 Gambar 2.9.b. Distribusi ia, ib, ic
Saat tegangan tiga phasa dihubungkan ke kumparan a-a, b-b, c-c (gambar
2.9.a) dengan beda phasa masing-masing 1200. Maka akan timbul timbul 3 buah
arus sinusoidal (Ia, Ib, Ic )yang terdistribusi berdasarkan fungsi waktu seperti
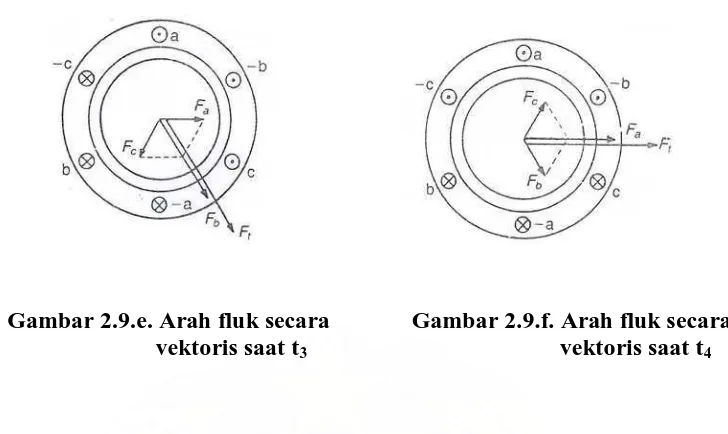
terlihat pada gambar (2.9.b). Secara vektoris, pada keadaan t1, t2, t3, t4, arah fluks
resultan yang ditimbulkan oleh kumparan tersebut masing-masing ditunjukkan
seperti pada gambar (2.9.c, 2.9.d, 2.9.e, 2.9.f). Pada saat t1, arah fluks resultannya
sama dengan arah fluks yang dihasilkan kumparan a-a (gambar 2.9.c). Pada saat
t2, arah fluks resultannya sama dengan arah fluks yang dihasilkan kumparan b-b
(gambar 2.9.d). Pada saat t3, arah fluks resultannya sama dengan arah fluks yang
dihasilkan kumparan c-c (gambar 2.9.e). Pada saat t4, arah fluks resultannya
berlawanan arah dengan arah fluks yang dihasilkan kumparan a-a (gambar 2.9.f).
Perubahan arah fluks ini akan terjadi berulang setiap satu periode yang
menyebabkan perputaran medan magnet stator.
Kutub medan rotor yang diberi penguatan arus searah mengakibatkan
mengalir arus penguat If motor dan menghasilkan medan magnet BR. Karena Gambar 2.9.f. Arah fluk secara
vektoris saat t4
motor sinkron tidak dapat melakukan start sendiri (self starting) maka rotor
diputar dengan suatu penggerak mula sampai pada kecepatan putar rotor sama
dengan kecepatan putar medan stator. Sehingga medan magnet rotor BR akan
mendapat tarikan dari kutub medan putar stator dan akan selalu menempel dan
mengikuti putaran BS dengan kecepatan yang sama atau sinkron. Interaksi antar
kedua medan magnet tersebut akan menghasilkan kopel yang dinyatakan sebagai :
Tind = k.BR x B
Tind = k.BR.BS.Sin …………..………….. pers.(2.6)
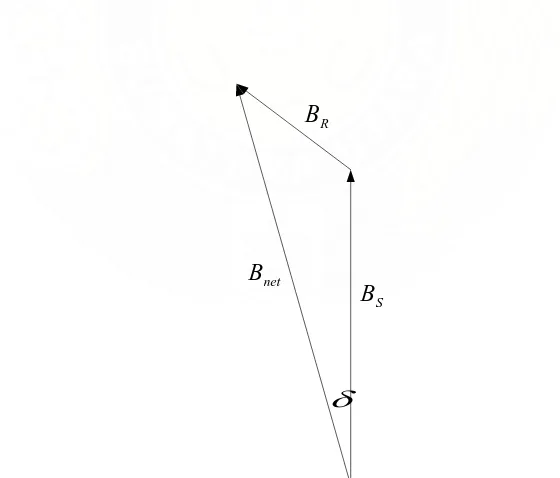
Dan hubungannya dengan diagram medan magnetnya adalah sebagai berikut :
δ
net
B
S
B
R
B
Keterangan :
BS = Medan magnet stator
BR = Medan magnet rotor
Bnet = Resultan medan magnet stator dan rotor
Sehingga didapat : Bnet≈ Vph ; BR≈ EA ; BS≈ j.XS.IA
Karena Bnet = BS + BR
Atau BS = Bnet + BR ... pers.(2.7)
Maka dengan mensubstitusikan pesamaan (2.7) ke persamaan (2.6), maka akan
diperoleh :
Tind = k.BR(Bnet – BR) Sin
Tind = k.BR.Bnet.Sin – k.(BR.BS) Sin BR.BR = 0
Sehingga persamaan kopel induksinya dapat dituliskan :
Tind = k.BR.Bnet.Sin Newton-meter
Dimana : k = Konstanta
BR = Medan magnet rotor
Bnet = Resultan medan magnet rotor dan medan magnet stator
= Sudut kopel
Pada beban nol, sumbu kutub medan berimpit dengan sumbu kutub
kumparan medan ( = 0). Setiap penambahan beban membuat motor rotor
berputar dengan kecepatan sama lagi (sinkron). Beban maksimum tercapai ketika
sudut kopel ( ) = 900
. Penambahan beban lebih lanjut mengakibatkan hilangnya
kekuatan kopel dan motor disebut kehilangan sinkronisasi.
II.5. Metode Menjalankan Motor Sinkron
Sesuai dengan prinsip kerjanya, motor sinkron tidak dapat melakukan start
sendiri (self starting). Motor sinkron harus diputar terlebih dahulu sampai pada
putaran sinkronnya. Hal ini dilakukan oleh penggerak mula (prime mover).
Biasanya, motor induksi atau motor DC mengambil peranan sebagai penggerak
mula tersebut. Tetapi penggunaan penggerak mula dalam start motor sinkron
sangat tidak praktis. Maka untuk start motor sinkron dilakukan dengan cara lain.
Saat ini ada tiga pendekatan utama yang dapat dilakukan untuk men-start
motor sinkron dengan aman, yaitu :
1. Menggunakan penggerak mula (prime mover) untuk memutar motor
sinkron sampai pada kecepatan sinkronnya.
2. Mereduksi putaran dengan mengatur medan stator ke harga yang cukup
rendah sampai rotor berputar
II.5.1. Starting Motor Sinkron Dengan Penggerak Mula
Pada metode start motor sinkron dengan penggerak mula, motor sinkron
dikopel dengan penggerak mula (prime mover), selanjutnya penggerak mula akan
memutar rotor motor sinkron sampai mencapai putaran sinkronnya. Selanjutnya
motor sinkron tersebut diparalelkan dengan jala-jala dan bekerja sebagai
generator. Setelah hal ini dicapai, penggerak mula dilepas dari poros motor.
Ketika penggerak mula dilepas dari poros motor, poros motor akan berputar
perlahan (putarannya menurun) sehingga medan magnet BR akan tertinggal
dibelakang Bnet dan mesin akan start beraksi sebagai motor. Saat paralelnya sudah
komplit, maka motor sudah dapat dibebani.
II.5.2. Staring Motor Sinkron Dengan Mereduksi Frekwensi
Cepatnya perputaran medan putar stator juga turut menyebabkan motor
sinkron tidak dapat melakukan start sendiri (self starting). Perputaran medan
magnet stator setiap menitnya adalah :
ns = 120f/p
dengan f adalah frekwensi tegangan terminal motor dan p adalah jumlah kutub
motor. Cepatnya perputaran medan magnet stator ini membuat tidak mungkinnya
terjadi interaksi tarik-menarik dan tolak menolak antara kutub medan magnet
stator dengan kutub medan magnet rotor yang diam.
Pada metode start dengan mereduksi frekwensi ini, pada saat start, motor
disuplai dengan frekwensi yang rendah sehingga kecepatan putaran medan putar
tolak-menolak antara kutub medan magnet stator dan kutub medan magnet rotor.
Setelah terjadi interaksi antara kedua kutub medan magnet tersebut, maka
frekwensi sistem pun dinaikkan secara perlahan sampai pada frekwensi dan
kecepatan sinkron yang diinginkan. Saat ini, pengaturan besar frekwensi yang
disuplai dapat dilakukan dengan menggunakan rectifier-inverter dan
cycloconverter.
II.5.3. Starting Motor Dengan Kumparan Peredam
Pada metode start dengan kumparan peredam, rotor dilengkapi dengan
kumparan peredam atau kumparan sangkar bajing yang ditempatkan pada
permukaan rotor yang dihubung singkat pada kedua ujungnya.
Saat kumparan stator dihubungkan dengan tegangan tiga phasa maka akan
timbul medan putar pada stator. Kemudian medan putar ini akan menginduksikan
ggl kedalam kumparan peredam yang telah terhubung singkat, maka dalam
kumparan peredam akan mengalir arus. Arus ini akan menimbulkan kopel antara
rotor dan stator secara magnetis sehingga rotor pun berputar. Namun kecepatan
putar rotor tidak sama dengan kecepatan sinkronnya. Pada saat ini, motor sinkron
bertindak sebagai motor induksi.
Setelah putaran rotor hampir mencapai kecepatan sinkronnya, maka
kumparan medan penguat yang berada pada rotor dieksitasi dengan sumber DC.
metode start ini dibutuhkan alat pengaturan sinkronisasi untuk menghindarkan
efek yang dapat merusak motor tersebut.
II.6. Pengaruh Kenaikan Beban Dengan Eksitasi Konstan
Bila beban pada poros motor sinkron bertambah besar maka putaran rotor
akan berkurang (slow down) untuk sesaat. Penambahan beban yang akan
menyebabkan sudut kopel ( ) akan semakin besar pula dan torsi induksi motor
sinkron juga akan bertambah besar. Bertambah besarnya torsi induks i motor
sinkron akan diikuti menurunnya putaran rotor untuk sesaat dan putaran rotor
akan kembali kepada kecepatan sinkronnya setelah beberapa saat tetapi dengan
sudut kopel ( ) yang lebih besar.
Jika diandaikan motor sinkron beroperasi dengan faktor daya leading
sebelum penambahan beban pada porosnya, maka diagram fasornya dapat dilihat
seperti yang ditunjukkan oleh gambar (2.11). Perubahan tegangan jangkar (EA)
hanya dipengaruhi oleh perubahan arus medan (If) motor sinkron. Jika arus medan
(If) bertambah besar maka tegangan jangkar (EA) pun bertambah besar dan
sebaliknya. Pada kondisi ini, arus medan motor sinkron tidak mengalami
perubahan (konstan). Maka tegangan jangkar juga akan konstan (tetap). Selain
A
E
A A
R
I .
A S
I
jX .
ph
[image:33.595.198.429.119.235.2]V
Gambar 2.11. Diagram Fasor Operasi Motor Dengan Faktor Daya Leading
Dengan eksitasi konstan yang menyebabkan tegangan jangkar (EA) juga
konstan, penambahan beban pada poros motor akan menyebabkan daya (EA.Sin
dan IA.Cos ) akan bertambah besar. Dengan adanya penambahan beban pada
poros motor dengan eksitasi yang konstan menyebabkan EA akan mengalami
swing down seperti yang ditunjukkan pada gambar (2.12). Akibat EA mengalami
swing down secara bertahap maka kuantitas j.XS.IA juga akan bertambah secara
bertahap. Oleh karena itu, arus jangkar juga akan semakin bertambah besar.
Perubahan ini akan menyebabakan faktor daya (Cos ) akan menjadi lagging.
[image:33.595.162.461.528.695.2]II.7. Pengaruh Perubahan Eksitasi Pada Faktor Daya
Pada saat motor sinkron memikul beban mekanis yang konstan,
penambahan arus medan akan menyebabkan bertambah besarnya tegangan
jangkar EA motor (ggl lawan). Tapi kenaikan arus medan (If) dan tegangan
jangkar (EA) tidak mempengaruhi besar daya nyata yang disuplai oleh motor
sinkron dan kecepatan putaran motor. Karena daya yang disuplai motor sinkron
hanya akan berubah bila torsi beban yang dipikul motor berubah.
Bertambahnya nilai tegangan jangkar (EA) akan menyebabkan arus
jangkar (IA) akan semakin kecil sampai arus minimumnya dan selanjutnya akan
bertambah besar. Pada saat sebelum EA bertambah besar, arus jangkar (IA) adalah
lagging dan motor merupakan beban induktif. Saat arus medan yang diberikan
pada motor semakin besar yang menyebabkan tegangan jangkar juga semakin
besar, arus jangkar akan menjadi leading. Pada kondisi ini motor merupakan
beban kapasitif yang dapat menyuplai daya reaktif (Q) ke sistem. Hubungan arus
medan (If) dan arus jangkar (IA) pada kondisi ini diperlihatkan pada plot If vs IA
Gambar 2.13. Kurva V motor sinkron
Untuk masing-masing kurva pada gambar (2.13), arus jangkar minimum
terjadi saat faktor daya sama dengan 1, yakni ketika hanya daya nyata yang
disuplai ke motor. Pada kurva yang sama dititk yang lain, ada daya reaktif yang
disuplai oleh motor. Untuk arus medan yang lebih kecil dari harga minimum IA
yang diberikan, arus jangkar akan lagging dan mengkomsumsi daya reaktif (Q).
Untuk arus medan lebih besar dari arus minimum IA yang diberikan, arus jangkar
akan leading dan mensuplai daya reaktif ke sistem seperti halnya kapasitor.
Perubahan arus medan pada motor sinkron akan mempengaruhi faktor
daya motor sinkron. Perubahan ini membuat motor sinkron dapat berada pada 3
kondisi operasi berdasarkan faktor dayanya, yaitu :
1. Saat motor sinkron mengalami pengurangan arus medan maka motor akan
beroperasi dengan faktor daya lagging. Diagram fasor untuk kondisi ini
E
V
rt
V
[image:36.595.177.452.112.201.2] [image:36.595.147.470.324.506.2]I
θ
α
Gambar 2.14.a. Diagram fasor motor sinkron dengan faktor daya lagging
2. Saat motor sinkron mengalami pengaturan arus medan yang menyebabkan
arus jangkar bernilai minimum maka motor beroperasi dengan faktor daya
sama dengan 1. Diagram fasor untuk kondisi ini diperlihatkan pada
gambar (2.14.b).
E
V
rt
V
I
[image:36.595.178.451.655.718.2]α
Gambar 2.14.b. Diagram fasor motor sinkron dengan faktor daya satu
3. Saat motor sinkron mengalami penambahan arus medan maka motor akan
beroperasi dengan faktor daya leading. Diagram fasor untuk kondisi ini
diperlihatkan pada gambar (2.14.c)
E
V
rt
V
I
θ
α
BAB III
KARAKTERISTIK TORSI-PUTARAN PADA
MOTOR SINKRON TIGA PHASA
III.1. Umum
Karakteristik yang umum dari suatu motor sinkron adalah karakteristik
torsi. Karakteristik dari suatu motor layak diketahui, karena karakteristik dari
suatu motor akan mencerminkan performansi (unjuk kerja) dari motor listrik
tersebut selam kondisi operasinya. Dalam tugas akhir ini akan dibahas
karakteristik berbeban dari motor sinkron tiga phasa yaitu karakteristik
torsi-putaran. Untuk mengetahui karakteristik motor sinkron tiga phasa dilakukan
pengujian pembebanan terhadap motor sinkron tiga phasa di Laboratorium. Dan
data hasil hasil pengujian yang didapat akan dianalisis untuk mengetahui
karakteristik dan mendapatkan grafik karakteristik berbeban motor sinkron tiga
phasa.
III.2. Pengaruh Perubahan Beban Pada Motor Sinkron
Pada motor induksi dan DC, penambahan beban akan menyebabkan
kecepatan motor berkurang. Pada motor sinkron, hal ini tidak terjadi. Karena rotor
terikat secara magnetik dengan medan putar dan harus terus berputar pada
kecepatan sinkron untuk semua beban.
Pada keadaan tanpa beban, posisi relatif kutub stator dan kutub medan DC
beban ditambahkan pada motor sinkron maka akan terjadi pergeseran posisi relatif
antara kutub stator dengan kutub rotor dan membentuk sudut kopel ( ). Saat ini
nilai tidak lagi sebesar 00. Namun tidak terjadi perubahan kecepatan motor.
Yang ada hanyalah pergeseran posisi relatif kutub stator dan kutub medan DC dan
motor tetap berputar pada kecepatan sinkronnya.
o
180
A
E
V
phGambar (3.1)
[image:38.595.159.439.278.758.2]Diagram fasor dalam gambar (3.1) menyatakan kondisi motor sinkron
tanpa beban, ggl lawan EA besarnya sama dengan dan berlawanan arah dengan
tegangan Vph. Dalam gambar (3.2), penambahan beban menyebabkan EA
tertinggal dibelakang posisi EA tanpa beban sebesar . Tegangan yang dikenakan
dan tegangan lawan tidak lagi tepat berlawanan arah. Resultannya adalah
tegangan Vr seperti yang ditunjukkan oleh gambar (3.2). Tegangan resultan Vr
menyebabkan arus I mengalir dalam lilitan stator. Arus I tertinggal Vr dengan
sudut hampir 900 disebabkan indukt ansi lilitan stator yang tinggi. Jadi masukan
daya pada motor adalah 3Vph.I.Cos , adalah sudut antara tegangan Vph dan arus
stator I.
Penambahan beban lebih lanjut menyebabkan sudut kopel semakin besar
dan selanjutnya memperbesar nilai Vr dan I seperti yang ditunnjukkan pada
gambar (3.3). Jadi motor sinkron dapat mencatu bertambahnya beban mekanis,
bukan dengan menurunkan kecepatan sinkronnya tetapi dengan pergeseran relatif
rotor dan medan magnet putar. Pada gambar (3.2) dan gambar (3.3), bahwa untuk
beban yang bertambah dengan nilai EA konstan, sudut fasa bertambah dan
arahnya tertinggal.
Namun jika beban motor sinkron yang ditambahkan terlalu besar dan
melebihi batas kekuatan kopel motor sinkron tersebut, rotor tidak sinkron lagi dan
[image:39.595.118.472.356.412.2]III.3. Kurva Karakteristik Torsi-Putaran Pada Motor Sinkron
Motor sinkron biasanya dihubungkan dengan suatu sistem daya yang
besar. Hal ini dimaksudkan agar tegangan terminal dan frekwensi sistem akan
selalu konstan. Kecepatan putaran motor terkunci pada frekwensi elektrik yang
disuplai, maka kecepatan motor juga akan tetap konstan. Karakteristik Kurva
Torsi-Putaran diperlihatkan pada gambar (3.4). Kecepatan steadystate motor
adalah konstan dari beban nol sampai torsi maksimum motor.
ind
T
pullout
T
rated
T
sync
[image:40.595.145.442.314.558.2]n
n
mGambar 3.4. Karakteristik Torsi-Putaran Motor Sinkron
Seiring dengan bertambahnya beban mekanis pada motor sinkron maka
torsi beban pun akan semakin bertambah pula. Untuk mempertahankan kondisi
putaran motor yang tetap, maka kenaikan torsi beban harus diimbangi oleh
Persamaan torsi pada motor sinkron adalah :
Tind = k.BR.Bnet.Sin Newton-meter
Atau S mek ind
P
T
ω
=
…....………pers.(3.1)Dengan mensubstitusikan persamaan (2.3) ke persamaan (3.1), maka didapat :
S S A ph ind
X
Sin
E
V
T
ω
δ
.
.
.
3
=
ataumeter
Newton
X
Sin
E
V
T
S S A phind
=
−
.
.
.
.
3
ω
δ
…..…pers.(3.2)Setiap penambahan beban, torsi beban motor akan bertambah karena
dipengaruhi oleh bertambahnya nilai Sin . Namun kecepatan sinkron motor tetap.
Jadi setiap terjadi penambahan beban sampai dibawah batas kekuatan kopel
tertinggi rotor dan medan putar stator, kecepatan akan tetap. Sehingga kurva
karakteristik Torsi-Putaran pada motor sinkron tiga phasa dapat dilihat seperti
pada gambar (3.4)
Torsi maksimum atau pull out torque terjadi saat = 900. Dan torsi
normalnya akan lebih kecil dari harga tersebut. Kenyataannya, torsi maksimum
dapat mencapai tiga kali dari pull out torque pada mesin. Ketika torsi pada poros
kesinkronannya terhadap medan magnet stator. Akibatnya rotor akan start dengan
slip dibelakangnya. Sebagai akibatnya, rotor akan berputar perlahan dan medan
magnet stator akan semakin naik dan ini terus berulang sampai dicapai arah dari
torsi induksi pada rotor berbalik. Rugi-rugi sinkronisasi setelah terjadinya torsi
lebih besar dari torsi maksimum dikenal sebagai slipping pole. Torsi maksimum
atau pull out torque dinyatakan oleh persamaan :
Nm
X
E
V
T
atau
B
B
k
T
S S A ph ind net R indω
.
.
.
3
.
.
=
=
Persamaan ini mengindikasikan bahwa arus medan terbesar (dalam hal ini
EA, menghasilkan torsi maksimum motor). Oleh karena itu, keuntungan stabilitas
BAB IV
ANALISIS KARAKTERISTIK TORSI-PUTARAN
PADA MOTOR SINKRON TIGA PHASA
IV.1. Umum
Percobaan pengukuran karakteristik berbeban motor sinkron tiga phasa
dilakukan dengan menggunakan pengereman phony brake untuk mendapatkan
karakteristik beban yang diinginkan. Percobaan ini dilakukan untuk mendapatkan
nilai torsi motor dari sinkron tiga phasa. Kemudian data hasil pengukuran
dianalisis untuk mendapatkan grafik karakteristik berbeban dari motor sinkron
tiga phasa.
Untuk mendapatkan nilai rugi-rugi inti, rugi-rugi gesek dan angin
dilakukan pengujian beban nol terhadap motor sinkron tiga phasa. Dalam hal ini,
rugi-rugi gesek dan angin dianggap kecil sehingga rugi-rugi inti dan rugi-rugi
gesek dan angin dapat dianggap sebagai rugi-rugi yang diperoleh pada pengujian
beban nol dari motor sinkron tiga phasa.
IV.2. Peralatan Yang Digunakan
Peralatan yang digunakan dalam penelitian ini adalah :
1. Motor sinkron tiga phasa
Tipe : 72SA
P = 5 KW
Cos = 0,8
Belitan = Y (wye)
Tegangan terminal = 400 Volt
Arus = 9 Amp
Kelas Isolasi
• Stator = E
• Rotor = E
Tegangan Eksitasi = 44 Volt DC
Arus eksitasi = 5,7 Amp
Frekwensi = 50 Hz
N = 1500 rpm
2. Motor Induksi Tiga Phasa (sebagai penggerak mula saat start)
Tipe : VZ 132M4
P = 7,5 KW
Cos = 0,82
Jumlah Kutub = 4
IP = 44
Kelas rotor = D (rotor sangkar)
Belitan = Y / ∆
Tegangan = 380 / 220 Volt
Arus = 16,5 / 28,5 Amp
3. Multimeter LCR
4. Amperemeter Tipe 4539-A
5. Portable Polyphase Wattmeter Tipe 2042
7. 2 Unit Power Suplai AC
8. 1 Unit Power Suplai DC
9. 1 Unit Phony Brake
IV.3. Pengujian Motor Sinkron Tiga Phasa
Untuk mendapatkan rugi-rugi pada motor sinkron dan mendapatkan
karakteristik berbeban dari motor sinkron tiga phasa dilakukan pengujian berikut :
IV.3.1. Pengujian Beban Nol
IV.3.1.1. Rangkaian Pengujian
P
T
D
C
M
1
A A
1
V V2
S1 U
v
w
P
T
A
C
S2
K L R S T
WATTMETER
[image:45.595.118.517.314.654.2]n
IV.3.1.2. Prosedur Pengujian
1. Susun dan rangkailah peralatan sesuai dengan gambar 4.1 di atas
2. Switch S1 dan S2 dalam posisi terbuka dan sumber tegangan dalam
keadaan minimum
3. Putar rotor dengan penggerak mula sampai kecepatan sinkronnya
4. Nyalakan PTDC dengan menutup S1 untuk kumparan medan dan atur
PTDC
5. Atur V2 dengan mengatur autotrafo sehingga diperoleh V1 = V2
6. Tutup switch S2 dan matikan penggerak mula
7. Catatlah penunjukan A, A1, V2, n dan Wattmeter (P0)
8. Pengujian selesai.
IV.3.1.3. Hasil Pengujian
V1 (volt) VL (volt) Ia (amp) If (amp) Putaran (rpm) P0 (watt)
100 105 1,67 0,5 1400 15
IV.3.1.4. Analisa Hasil Pengujian
Rugi-rugi inti dan rugi-rugi gesek dan angin rotor motor sinkron dalam
pengujian motor sinkron tiga phasa ini dianggap rugi-rugi pada pengujian beban
nol dari motor sinkron tiga phasa. Pada pengujian beban nol motor sinkron tiga
IV.3.2. Pengujian Berbeban
Pada pengujian berbeban dari motor sinkron tiga phasa, alat pengereman
Phony Brake digunakan sebagai beban motor sinkron tiga phasa yang diuji dalam
pengujian ini.
IV.3.2.1. Rangkaian Pengujian
P
T
D
C
M
1 A A 1V V2
S1 U v w
P
T
A
C
S2K L R S T
WATTMETER
n
T
[image:47.595.124.513.282.522.2]Rf
Gambar 4.2. Rangakaian Pengujian Berbeban
IV.3.2.2. Prosedur Pengujian
1. Susun dan rangkailah peralatan sesuai dengan gambar 4.2 di atas
2. Switch S1 dan S2 dalam posisi terbuka dan sumber tegangan dalam
keadaan minimum
3. Putar rotor dengan penggerak mula damapi pada kecepatan sinkronnya
4. Nyalakan PTDC denga menutup S1
6. Tutup switch S2 dan matikan penggerak mula
7. Bebani motor sinkron dengan pengereman Phony Brake
8. Tambah panjang lengan rem Phony Brake secara bertahap
9. Catat penunjukan A, A1, V2, n, T dan Wattmeter (P0).
10.Ulangi prosedur 8 dan 9 sebanyak 4 kali
11.Pngujian selesai.
IV.3.2.3. Data Hasil Pengujian
Dalam pengujian pembeban ini, percobaan pembebanan dilakukan
sebanyak 4 kali dan dilakukan pengambilan data untuk setiap pengujian.
Data Hasil Pengujian I
N0 Pertambahan Panjang
Lengan Rem (cm)
Ia
(Amp)
Tsh
(N.m)
Putaran (rpm)
1 0,5 1,88 0,129 1400
2 1,0 1,94 0,132 1400
3 1,5 2,20 0,134 1400
4 2,0 2,40 0,137 1400
5 2,5 2,52 0,140 1400
Data Hasil Pengujian II
N0 Pertambahan Panjang
Lengan Rem (cm)
Ia
(Amp)
Tsh
(N.m)
Putaran (rpm)
1 0,5 1,88 0,129 1400
2 1,0 1,95 0,132 1400
3 1,5 2,20 0,134 1400
4 2,0 2,40 0,137 1400
5 2,5 2,52 0,140 1400
6 3,0 3,92 0,143 Lepas sinkron
Data Hasil Pengujian III
N0 Pertambahan Panjang
Lengan Rem (cm)
Ia
(Amp)
Tsh
(N.m)
Putaran (rpm)
1 0,5 1,90 0,129 1400
2 1,0 1,95 0,132 1400
3 1,5 2,21 0,134 1400
4 2,0 2,40 0,137 1400
5 2,5 2,52 0,140 1400
Data Hasil Pengujian IV
N0 Pertambahan Panjang
Lengan Rem (cm)
Ia
(Amp)
Tsh
(N.m)
Putaran (rpm)
1 0,5 1,88 0,129 1400
2 1,0 1,94 0,132 1400
3 1,5 2,20 0,134 1400
4 2,0 2,40 0,137 1400
5 2,5 2,53 0,140 1400
6 3,0 3,90 0,143 Lepas sinkron
Dari keempat kali pengambilan data pengujian diperoleh data rata-rata hasil
pengujian sebagai berikut :
N0 Pertambahan Panjang
Lengan Rem (cm)
Ia
(Amp)
Tsh
(N.m)
Putaran (rpm)
1 0,5 1,885 0,129 1400
2 1,0 1,945 0,132 1400
3 1,5 2,2025 0,134 1400
4 2,0 2,40 0,137 1400
5 2,5 2,5225 0,140 1400
IV.3.2.4. Analisa Hasil Pengujian Dan Grafik
Dari data hasil pengujian pembebanan motor sinkron, nilai Torsi induksi
(Tind ) setiap terjadi penambahan beban pada motor sinkron tiga phasa dapat dicari
dengan rumus :
S mekanik ind P T ω = S sh out out
mekanik P P P T
P = + 0 → = ×ω
Maka
(
)
S S sh ind P T T
ωω + 0
× =
Hasil perhitungan Tind dapat dilihat pada tabel dibawah ini :
No. Penambahan Panjang
Lengan Rem (cm)
Tind (N.m) Putaran (rpm)
1 0,5 0,2313 1400
2 1,0 0,2343 1400
3 1,5 0,236 1400
4 2,0 0,239 1400
5 2,5 0,2423 1400
Dari hasil pengujian diatas dapat dibuat kedalam kurva karakteristik berbeban
seperti pada gambar dibawah ini :
Karakteristik Torsi-Putaran
0 0,05 0,1 0,15 0,2 0,25
0 500 1000 1500
Putaran (rpm)
T
o
rs
i I
n
d
u
k
s
i (
N
.m
[image:52.595.168.455.167.728.2])
BAB V
PENUTUP
V.1. Kesimpulan
Berdasarkan hasil analisa dan uraian pada bab-bab sebelumnya, maka dapat
diambil kesimpulan sebagai berikut :
1. Setiap penambahan beban pada motor sinkron tiga phasa akan
menyebabkan bertambahnya besar nilai Torsi Induksi pada motor sinkron
tiga phasa.
2. Dari grafik karakteristik Torsi-Putaran motor sinkron tiga phasa dapat
dilihat bahwa untuk setiap penambahan beban sampai pada batas kekuatan
kopel motor sinkron, motor akan tetap berputar pada kecepatan konstan.
3. Pada motor sinkron yang diujikan dalam pengujian ini, motor sinkron akan
DAFTAR PUSTAKA
1. Chapman S J, Electric Machinery Fundamental, Mc Graw-Hill Book
Company, 1985
2. Cogdell J. R, Foundation of Electrical Engineering, Pretience Hall, New
Jersey, 1990
3. Eugene C. Lister, Mesin dan Rangkaian Listrik, Edisi Keenam, Penerbit
Erlangga, Jakarta, 1993
4. Firgerald Charles Kingslay JR, Mesin-Mesin Listrik, Edisi Keenam,
Penerbit Erlangga, Jakarta, 1993
5. Guru, Bhag S & Huseyin R. Hiziroglu, Electric Machinery And
Transformers, Hartcourt Brace Jovanovich, 1988
6. Langsdorf, Alexander S, Theory of Alternatinf Current Machinery, TATA
Mc Graw-Hill Publishing Company, New Delhi, 1974
7. Richardson, V. Donal & Arthur Caisse, Rotating Electric Machinery And
Transformers Technology, Fourt Edition, Prentice Hall, New Jersey, 1997
8. Thearaja B. L, A Teks-Book of Electrical Technology, Nurja Construction
& Development, New Delhi, 1989
9. Wijaya, Mochtar, Dasar-Dasar Mesin Listrik, Penerbit Djambatan,
Jakarta, 2001
10.Zuhal, Dasar Teknik Tenaga Listrik Dan Elektronika Daya, Edisi Ke-5,