BAB II
MOTOR INDUKSI TIGA PHASA
2.1 Umum
Motor induksi merupakan motor listrik arus bolak balik (ac) yang paling
luas digunakan.Penamaannya berasal dari kenyataan bahwa motor ini bekerja
berdasarkan induksi medan magnet stator ke rotornya,dimana arus motor ini
bukan diperoleh dari sumber tertentu,tetapi merupakan arus yang terinduksi
sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar
(rotating magnetic field) yang dihasilkan oleh arus stator.
Motor ini memiliki konstruksi yang kuat,sederhana,handal serta bebiaya
murah. Disamping itu motor ini juga memeilki efisiensi yang tinggi saat bebeban
penuh dan tidak membutuhkan perawatan yang banyak.
Hampir semua motor ac yang digunakan adalah motor induksi,terutama
motor induksi tiga phasa yang paling banyak dipakai di perindustrian.Motor
induksi tiga phasa sangat banyak digunakan di perindustrian karena banyak
memiliki keuntungan,tetapi ada juga kelemahannya.
Keuntungan motor induksi tiga phasa:
• Motor induksi tiga phasa sangat sederhana dan kuat
• Biaya murah dan dapat diandalkan
• Memiliki efisiensi yang tinggi pada kondisi kerja normal
• perawatannya mudah
Kelemahannya :
• Kecepatannya tergantung beban
• Pada torsi start memiliki kekurangan
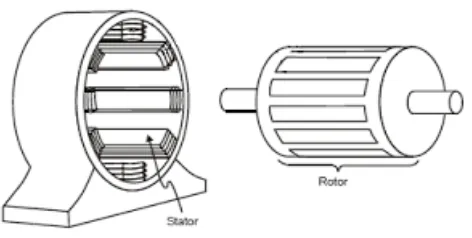
2.2 Konstruksi Motor Induksi Tiga Phasa
Secara umum motor induksi terdiri dari rotor dan stator.Rotor merupakan
bagian yang bergerak,sedangkan stator bagian yang diam.Diantara stator dan rotor
ada celah udara yang jaraknya sangat kecil. Konstruksi motor induksi dapat dilihat
pada Gambar 2.1.
Gambar 2.1 konstruksi sederhana motor induksi
Komponen stator adalah bagian terluar dari motor yang merupakan bagian
yang diam dan mengalirkan arus phasa.Stator terdiri atas tumpukan laminasi inti
yang memiliki alur yang menjadi tempat kumparan dililitkan yang bebentuk
silindris. Alur pada tumpukan laminasi inti diisolasi dengan kertas.Tiap elemen
laminasi inti dibentuk dari lembaran besi.Tiap lembaran besi tersebut memiliki
alur dan beberapa lubang untuk menyatukan inti.
• Slot
Slot merupakan tempat untuk meletakkan kumparan stator yang dibentuk
• Kumparan stator
Kumparan stator merupakan tempat terbentuknya tegangan induksi pada
generator dan didesain untuk menghasilkan kutub-kutub elektromagnetik stator
yang sinkron dengan kutub magnet rotor.
Sedangkan pada bagian rotor terdapat tiga bagian utama, yaitu:
• Collector ring atau slip ring
Collector ring merupakan cincin logam yang melingkari poros rotor, tetapi
dipisahkan oleh isolasi tertentu.Bagian ini merupakan bagian yang terhubung
dengan sumber arus searah yang untuk selanjutnya dialirkan menuju kumparan
rotor.
• Kumparan rotor
Kumparan rotor merupakan bagian yang dialiri arus searah sebagai sumber
medan magnet melalui sistem eksitasi tertentu.
• Poros
Poros merupakan tempat untuk meletakkan kumparan rotor dan
merupakan bagian yang terkopel dengan dan diputar oleh prime mover.
2.3 Prinsip Kerja Motor Induksi Tiga Phasa
Ketika medan magnetik memotong konduktor rotor, di dalam konduktor
tersebut akan diinduksikan ggl yang sama seperti ggl yang diinduksikan dalam
lilitan sekunder transformator oleh fluksi primer. Rangkaian rotor merupakan
rangkaian tertutup, baik melalui cincin ujung maupun tahanan luar. Ggl induksi
menyebabkan arus mengalir di dalam konduktor rotor.. Sehingga dengan adanya
aliran arus pada konduktor rotor di dalam medan magnet yang dihasilkan stator,
Untuk memperjelas prinsip kerja motor induksi tiga phasa, maka dapat
dijabarkan dalam beberapa langkah berikut:
1. Pada keadaan beban nol ketiga phasa stator yang terhubung dengansumber
tegangan tiga phasa yang setimbang akan menghasilkan arus pada
tiapbelitanphasa arus pada tiap phasa menghasilkan fluksi bolak – balik
yang berubah -ubah.
2. amplitudo fluksi yang dihasilkan berubah secara sinusoidal dan
arahnyategak lurus terhadap belitanphasa
3. akibat fluksi yang berputar timbul ggl pada stator motor yang besarnya :
�1 =−� ��
��(����) (2.1) �1 = 4.44��1� (����) (2.2)
4. Resultan dari ketiga fluksi bolak – balik tersebut menghasilkan
medanputar yang bergerak dengan kecepatan sinkron ns yang besarnya
ditentukanoleh jumlah kutub p dan frekuensi stator f yang dirumuskan:
�� = 120��(���) (2.3)
5. fluksi yang berputar tersebut akan memotong batang konduktor padarotor.
Akibatnya pada kumparan rotor timbul tegangan induksi sebesar
E2yangbesarnya
�2 = 4.44��2��(����) (2.4)
Dimana:
E2 = tegangan induksi pada rotor saat rotor dalam keadaan diam(volt)
N2 = jumlahlilitanrotor
6. karena kumparan rotor merupakan rangkaian tertutup, maka ggl
tersebutakan menghasilkan arusI2
7. adanya arus I2 di dalam medan magnet akan menimbulkan gaya F
padarotor
8. Bila kopel mula yang dihasilkan oleh gaya F cukup besar untukmemikul
kopel beban, rotor akan berputar searah dengan medan putarstator.
9. perputaran rotor akan semakin meningkat hingga mendekatikecepatan
sinkron. Perbedaan kecepatan medan putar stator (ns) dengan
kecepatanrotor (nr) disebut slip (s) dan dinyatakan dengan:
�= ��− ��
�� � 100% (2.5)
10.padasaatrotordalamkeadaanberputar,besarnyateganganyangterinduksi pada
kumparan rotor akan bervariasi tergantung besarnya slip.Tegangan induksi
ini dinyatakan dengan E2s yang besarnya:
�2� = 4.44���2��(����) (2.6)
dimana:
E2s = tegangan induksi rotor dalam keadaan berputar (volt)
f2 = sf = frekuensi rotor ( frekuensi tegangan induksi pada rotor dalam
keadaan berputar )
11.bilans = nr, tegangan tidak akan terinduksi dan arus tidak akan
mengalirpada kumparan rotor, sehingga tidak akan dihasilkan kopel.
2.4 Medan Putar
Perputaran motor pada arus bolak-balik ditimbulkan oleh adanya medan putar (fluks
yang berputar) yang dihasilkan dalam kumparan statornya. Medan putar ini terjadi apabila
kumparan stator dihubungkan dalam fasa banyak, umumnya phasa tiga.
�� =�� sin�� (2.4.1�)
�� = ��sin (�� −1200) (2.4.1�)
�� =��sin(�� −2400) (2.4.1�)
Gambar 2.2 Gambar 2.3
Arus Tiga Phasa Setimbang Diagram phasor fluksi tiga phasa setimbang
iii iv
Gambar 2.4 Medan putar pada motor induksi tiga phasa
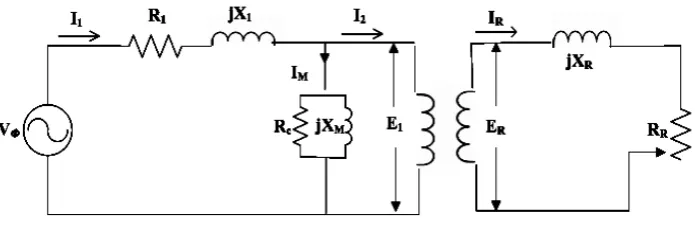
2.5 Rangkaian Ekivalen Motor Induksi Tiga Phasa
Operasi dari motor induksi tergantung pada induksi arus dan tegangan di dalam
rangkaian rotor yang berasal dari rangkaian stator karena adanya aksi transformator. Karena
induksi arus dan tegangan pada motor induksi pada dasarnya sama dengan operasi
transformator, maka rangkaian ekivalen motor induksi akan sangat menyerupai rangkaian
ekivalen dari transformator. Motor induksi disebut juga sebagai singly excited machine,
sebab daya hanya disuplai dari rangkaian stator.
Karena motor induksi tidak memiliki rangkaian medan, maka pada modelnya tidak
akan terdapat sumber tegangan internal EA sebagaimana dijumpaipada mesin sinkron.
Rangkaian ekivalen per phasa dari transformator dapat menggantikan operasi dari
motor induksi. Sebagaimana halnya pada transformator, maka akan terdapat tahanan (R1) dan
induktansi sendiri (X1) pada belitan stator yang direpresentasikan dalam rangkaian ekivalen
Gambar 2.5 Rangkaian ekivalen motor induksi sebagai model transformator
Tegangan stator E1 dikopel terhadap sisi sekunder ER sebagaimana halnya
transformator ideal dengan rasio belitan effektif aeff. Rasio belitan ini dengan mudah dapat
ditentukan pada motor induksi rotor belitan, yang mana pada dasarnya rasio ini merupakan
banyaknya konduktor per phasa pada stator terhadap jumlah konduktor per phasa pada rotor.
Akan tetapi tidak demikian halnya pada motor induksi sangkar tupai, karena tidak
terdapatnya belitan pada rotor motor tersebut.
Tegangan ER pada rotor akan menghasilkan arus, karena rangkaian rotornya
terhubung singkat.
Impedansi rangkaian primer dan arus magnitisasi dari motor induksi sama halnya
dengan komponen - komponen yang dijumpai pada transformator. Hal yang membedakan
rangkaian ekivalen tersebut pada motor induksi dikarenakan terdapatnya variasi frekuensi
pada tegangan rotor (ER), impedansi rotor RR dan jXR.
Ketika tegangan diberikan pada belitan stator, maka tegangan
akandiinduksikan pada belitan rotornya. Pada umumnya, gerak relatif yang lebih besar di
antara rotor dan medan putar stator, akan menghasilkan tegangan dan frekuensi rotor yang
disebut juga dalam keadaan blocked rotor. Sebaliknya, frekuensi dan tegangan terendah
timbul saat rotor berputar pada kecepatan yang sama dengan kecepatan sinkron, sehingga
tidak terdapat pergerakan relatif. Magnitud dan frekuensi tegangan induksi rotor pada saat
berputar sebanding dengan slip dari rotornya. Sehingga, besarnya tegangan induksi rotor
dalam kondisi rotor terkunci disebut ERO, sedangkan untuk slip pada suatu putaran tertentu
dirumuskan dengan :
��� = ���� (2.7)
Dan frekuensi induksi pada slip tertentu :
�� =��� (2.8)
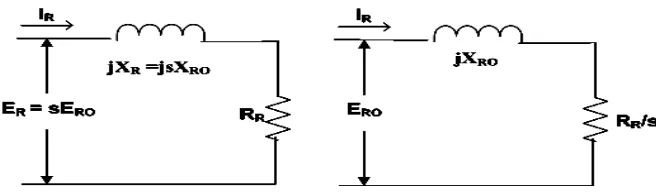
Tahanan dari rotor RR bernilai konstan/ tidak tergantung pada slip, sementara itu pada
reaktansi rotor besarnya akan dipengaruhi oleh slip.
Reaktansi dari rotor tergangtung pada induktansi rotor, frekuensi tegangan rotor dan
arus pada rotor. Bila induktansi rotor LR, maka reaktansi rotor adalah :
XR= ωr LR= 2 π fr LR : fr = sfe
Sehingga
XR = 2 π sfe LR
= s(2 π sfe LR)
=���� (2.9) LR= induktansi rotor
Gambar 2.6 Rangkaian ekivalen rotor motor induksi
Dari gambar 2.6 arus pada rotor dapat ditentukan sebagai :
�� = � ��
�+��� (2.10)
�� = � ��
�+���� (2.11)
�� = �� �� � +����
(2.12)
Dimana :
IR = arus rotor ( A )
ER = tegangan induksi pada rotor ( V )
RR = tahanan rotor ( Ώ )
XR = reaktansi rotor ( Ώ )
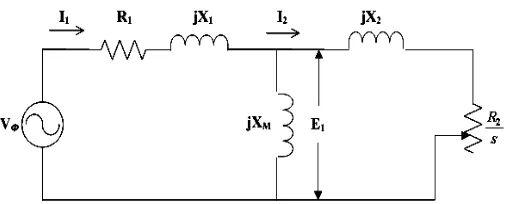
Dalam teori transformator, analisa rangkaian ekivalen sering disederhanakan dengan
mengabaikan seluruh cabang magnetisasi atau dengan memindahkan langsung ke terminal
primer. Pendekatan demikian tidak dibenarkan dalam motor induksi yang bekerja dalam
keadaan normal, karena adanya celah udara yang menjadikan perlunya suatu arus magnetisasi
yang sangat besar (30% sampai 40% dari arus beban penuh). Untuk itu dalam rangkaian
Gambar 2.7 Rangkaian ekivalen motor induksi jika rugi-rugi inti diabaikan 2.6 Penentuan Parameter Motor Induksi
Data yang diperlukan untuk menghitung performansi dari suatu motor induksi dapat
diperoleh dari hasil pengujian tanpa beban, pengujian rotor tertahan, dan pengukuran tahanan
dc lilitan stator.
2.6.1 Pengujian Tanpa Beban ( No Load Test )
Pengujian tanpa beban pada motor induksi akan memberikan keterangan berupa
besarnya arus magnetisasi dan rugi – rugi tanpa beban. Biasanya pengujian tersebut
dilakukan pada frekuensi yang diizinkan dan dengan tegangan tiga phasa dalam keadaan
setimbang yang diberikan pada terminal stator. Pembacaan diambil pada tegangan yang
diizinkan setelah motor bekerja cukup lama, agar bagian – bagian yang bergerak mengalami
pelumasan sebagaimana mestinya. Rugi – rugi rotasional keseluruhan pada frekuensi dan
tegangan yang diizinkan pada waktu dibebani biasanya dianggap konstan dan sama dengan
rugi – rugi tanpa beban.
Pada keadaan tanpa beban, besarnya arus rotor sangat kecil dan hanya diperlukan
untuk menghasilkan torsi yang cukup untuk mengatasi gesekan. Karenanya rugi – rugi I2R
tanpa beban cukup kecil dan dapat diabaikan. Padatransformator rugi – rugi I2R
induksi besarnya cukup berarti karena arus magnetisasinya lebih besar. Besarnya rugi – rugi
rotasional PR pada keadaan kerja normal adalah :
���� =��� −3�2���1 (2.13)
Dimana :
Pnl = daya input tiga phasa
Inl = arus tanpa beban tiap phasa ( A )
R1 = tahanan stator tiap phasa ( ohm )
Karena slip pada keadaaan tanpa beban sangat kecil, maka akan mengakibatkan
tahanan rotor R2/s sangat besar. Sehingga cabang paralel rotor dan cabang magnetisasi
menjadi jXM di shunt dengan suatu tahanan yang sangat besar,dan besarnya reaktansi cabang
paralel karenanya sangat mendekati XM. Sehingga besar reaktansi yang tampak Xnl yang
diukur pada terminal stator pada keadaantanpa beban sangat mendekati X1 + XM, yang
merupakan reaktansi sendiri dari stator, sehingga :
Xnl = X1+ XM (2.14)
Maka besarnya reaktansi diri stator, dapat ditentukan dari pambacaan alat ukur pada
keadaan tanpa beban. Untuk mesin tiga phasa yang terhubung Y besarnya impedansi tanpa
beban Znl/ phasa :
Znl =
Vnl
�3Inl (2.15)
Di mana Vnl merupakan tegangan line, pada pengujian tanpa beban.
Besarnya tahanan pada pengujian tanpa beban Rnladalah :
Rnl =
Pnl
Pnl merupakan suplai daya tiga phasa pada keadaan tanpa beban, maka besar reaktansi
tanpa beban
Xnl =�Z nl2 −R2 nl (2.17)
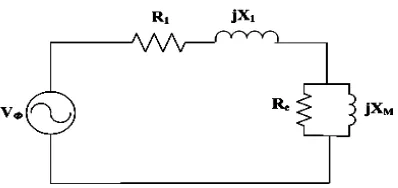
sewaktu pengujian beban nol, maka rangkaian ekivalen motor induksi seperti gambar
2.8 berikut :
Gambar 2.8 Rangkaian ekivalen motor induksi pada percobaan beban nol
2.6.2 Pengujian Tahanan Stator ( DC Test )
Untuk menentukan besarnya tahanan stator R1 dilakukan dengan test DC. Pada
dasarnya tegangan DC diberikan pada belitan stator motor induksi.Karena arus yang disuplai
adalah arus DC, maka tidak terdapat tegangan yang diinduksikan pada rangkaian rotor
sehingga tidak ada arus yang mengalir pada rotor. Dalam keadaan demikian, reaktansi dari
motor juga bernilai nol, oleh karena itu, yang membatasi arus pada motor hanya tahanan
stator.
Untuk melakukan pengujian ini, arus pada belitan stator diatur pada nilai rated, yang
mana hal ini bertujuan untuk memanaskan belitan stator pada temperatur yang sama selama
operasi normal. Apabila tahanan stator dihubung Y, maka besar tahanan stator/ phasa adalah :
�1 = ���
�1 =
3���
2��� (2.19) Dengan diketahuinya nilai dari R1, rugi – rugi tembaga stator pada beban nol dapat
ditentukan, dan rugi – rugi rotasional dapat ditentukan sebagai selisih dari daya input pada
beban nol dan rugi – rugi tembaga stator. Gambar 2.9 menunjukkan salah satu bentuk
pengujian DC pada stator motor induksi yang terhubung Y.
Gambar 2.9 Rangkaian pengukuran untuk DC test
2.6.3 Pengujian Rotor Tertahan ( Block Rotor Test )
Pengujian ini bertujuan untuk menentukan parameter – parameter motor induksi, dan
biasa juga disebut dengan locked rotor test. Pada pengujian ini rotor dikunci/ ditahan
sehingga tidak berputar.
Untuk melakukan pengujian ini, tegangan AC disuplai ke stator dan arus yang
mengalir diatur mendekati beban penuh. Ketika arus telah menunjukkan nilai beban
penuhnya, maka tegangan, arus, dan daya yang mengalir ke motor diukur.
Saat pengujian ini berlangsung s = 1 dan tahanan rotor R2/s = R2. Karena nilai R2 dan
X2 begitu kecil, maka arus input akan seluruhnya mengalir melalui tahanan dan reaktansi
tersebut. Oleh karena itu, kondisi sirkit pada saat ini terlihat seperti kombinasi seri X1, R1, X2,
dan R2. Sesudah tegangan dan frekuensi diatur, arus yang mengalir pada motor diatur dengan
cepat, sehingga tidak timbul kenaikan temperatur pada rotor dengan cepat. Daya input yang
diberikan kepada motoradalah :
��� =√3���� (2.20)
Dimana :
VT = tegangan line pada saat pengujian berlansung
IL= arus line pada saat pengujian berlangsung
��� = ��
X1’ + X2’ adalah reaktansi stator dan rotor pada frekuensi pengujian
�2 =��� − �1 (2.24)
Nilai dari R1 ditentukan dari test DC. Karena reaktansi berbanding langsung dengan
frekuensi, maka reaktansi ekivalen total ( XBR ) pada saat frekuensi operasi normal
��� =������� ���� ����
′ =�
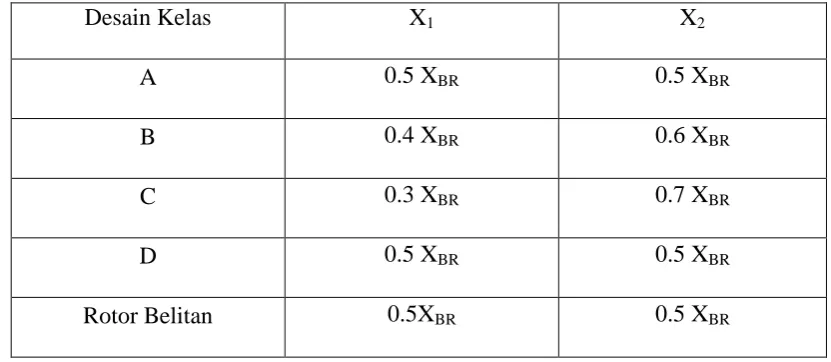
Untuk memisahkan harga X1 dan X2, maka dapat digunakan tabel 1
Tabel 1. Distribusi reaktansi X1dan X2 pada berbagai desain motor induksi
Desain Kelas X1 X2
A 0.5 XBR 0.5 XBR
B 0.4 XBR 0.6 XBR
C 0.3 XBR 0.7 XBR
D 0.5 XBR 0.5 XBR
Rotor Belitan 0.5XBR 0.5 XBR
2.7 Efisiensi Motor Induksi
Efisiensi menunjukkan tingkat keefisienan kerja suatu peralatan dalam hal ini tmotor
induksi yang merupakan perbandingan rating output (keluaran) terhadap input (masukan) dan
dinyatakan dengan persamaan dibawah ini :
η
=
�
PoutPin
�
× 100%
2.8 Metode Pengukuran Temperatur
Berikut ini adalah metode dalam menentukan temperatur motor induksiyaitu :
a. Menggunakan Thermomter Infrared
Metode ini adalah penentuan suhu dengan sensor suhu, atau dengan thermometer
infrared, dengan metode ini instrumen diterapkan pada bagian terpanas dari mesin yang dapat
b. Mengunakan Embedded Detector
Metode ini adalah penentuan suhu dengan termokopel atau resistensi detektor suhu
yang diletakkan ke dalam mesin sesuai dengan ANSI C50.10-1977 atau NEMA MG1-1978
c. Mengukur Tahanan Lilitan motor
Penentuan temperature dengan metode ini yaitu dengan membandingkan tahanan
lilitan motor pada temperature yang ingin ditentukan dengan tahanan yang sudah diketahui
temperaturnya. Temperature tahanan yang ingin ditentukan dapat dihitung dengan
persamaaan :
�� =������− ��
� �(�� + �) (2.26)
Dimana : Tt : Temperatur total lilitan (oC)
Tb : Temperatur pada saat motor dingin (oC)
Rt : Tahanan pada saat motor panas (ohm)
Rb : Tahanan pada saat motor dingin (ohm)
K : 234.5 ( konstanta untuk bahan tembaga ) (oC)
225 ( konstanta untuk bahan aluminium ) (oC)
d. Menggunakan Pendeteksi Temperatur Lokal
Dengan pendeteksi temperature lokal berbagai panas bagian mesin dapat ditentukan
dengan menggunakan detektor ini.detektor ini ditempatkan di dekat dengan bagian mana
suhu lokal akan diukur .Contoh detektor suhu local, sensor inframerah, termokopel,
termometer resistensi kecil, dan termistor.Detector ini sering dipasang sebagai bagian