Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
TUGAS AKHIR
PENGARUH TEGANGAN TIDAK SETIMBANG TERHADAP TORSI DAN EFFISIENSI MOTOR INDUKSI TIGA PHASA
O L E H
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
HENRY A.SIREGAR NIM : 03 0402 035
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
PENGARUH TEGANGAN TIDAK SETIMBANG TERHADAP TORSI DAN EFFISIENSI MOTOR INDUKSI TIGA PHASA
Oleh :
HENRY A.SIREGAR NIM : 030402035
Disetujui oleh :
Pembimbing,
IR. SATRIA GINTING
Diketahui oleh :
Ketua Departemen Teknik Elektro FT USU,
2008
IR. NASRUL ABDI, MT NIP : 131 459 555
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
ABSTRAK
Tegangan tiga phasa yang menyuplai motor induksi dapat ditemukan dalam
keadaan tidak setimbang. Penyebab dari ketidaksetimbangan tegangan tiga phasa ini
dapat disebabkan oleh adanya gangguan – gangguan asimetri pada sistem tenaga,
distribusi beban – beban satu phasa yang tidak merata pada sistem tenaga yang sama,
kegagalan operasi dari peralatan pengoreksi faktor daya, impedansi tidak setimbang
dari transformator penyuplai, dan lain sebagainya.
Hal di atas dapat mempengaruhi performansi dari motor induksi tiga phasa
tersebut, yang mana dalam hal ini lebih difokuskan akan mempengaruhi torsi dan
effisiensinya. Oleh karena itu dalam tugas akhir ini akan dijelaskan pengaruh
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
KATA PENGANTAR
Pertama - tama, penulis ingin sekali berterima kasih kepada Tuhan Yesus, yang oleh
karena kasihNya , penulis masih dimampukan menyelesaikan tugas akhir ini.
Adapun tugas akhir ini berjudul “ Pengaruh Tegangan Tidak Setimbang Terhadap
Torsi dan Effisiensi Motor Induksi Tiga Phasa”, yang disusun dan diajukan sebagai
salah satu syarat untuk memperoleh gelar sarjana teknik elektro.
Sebagai manusia, penyusun menyadari bahwa penulisan tugas akhir ini masih jauh
dari sempurna. Oleh karena itu, penyusun berharap kekurangan – kekurangan
tersebut dapat dimaklumi.
Dalam penulisan tugas akhir ini, penulis tidak terlepas dari bantuan banyak pihak.
Maka dalam kesempatan ini, penyusun juga ingin berterima kasih kepada :
1. Kedua orang tua saya (R. Siregar dan D. br Simorangkir), nenekku
(N. br Harahap), dan adik – adikku (Evelyn, David, dan Bella), yang selalu
memperhatikanku dan yang terbanyak memberiku motivasi, sehingga Tugas
Akhir ini masih dapat diselesaikan.
2. Bapak Ir. Satria Ginting selaku dosen pembimbing tugas akhir yang telah
banyak memberikan sumbangan ilmu dan waktunya.
3. Bapak Ir. Nasrul Abdi, MT dan Bapak Rachmat Fauzi ST, MT selaku Ketua
dan Sekretaris Departemen Teknik Elektro Fakultas Teknik USU.
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
5. Bapak Ir. Mustafrin Lubis, selaku Kepala Laboratorium Mesin – Mesin
Listrik
6. Seluruh staff pengajar / dosen departemen Teknik Elektro FT. USU
7. Seluruh staff tata usaha departemen Teknik Elektro FT. USU
8. Saudara Eko (asisten laboratorium mesin – mesin listrik) yang telah banyak
meluangkan waktunya saat penyusun melakukan riset
9. Teman – teman nongkrong bareng : Eone , Teta, Riko, Teddy , Hans, Paniel ,
yang paling solid selama ini.
10.Teman – teman pengurus IMTE ; Ery, Marlen , dan Chandra
11.Teman – teman KP di Indonesia Power Suralaya : Buhari , Elrijohn, Pipin,
Weldy, dan Benny, dan Dody, Jefanya Ginting
12.Teman – teman ’03 yang nama – namanya tak dapat disebutkan satu persatu
13.Teman – teman ’04, ’05, ’06, yang namanya tak dapat disebutkan satu persatu
yang telah banyak memberi dorongan semangat pada penulis selama
pengerjaan tugas akhir ini.
Penulis menyadari bahwa penyusunan karya ilmiah ini masih belum sempurna. Oleh
karena penulis sangat mengharapkan kritik dan saran dari pembaca yang bisa
membangun tugas akhir ini menjadi lebih baik lagi. Akhirnya penulis berharap
bahwa karya ilmiah ini dapat bermanfaat bagi semua pihak.
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Henry A. Siregar
ABSTRAK
KATA PENGANTAR DAFTAR ISI
I. PENDAHULUAN
1.1 Latar Belakang 1
1.2 Tujuan Penulisan 2
1.3 Manfaat Penulisan 2
1.4 Batasan Masalah 3
1.5 Metode Penulisan 3
1.6 Sistematika Penulisan 4
II. MOTOR INDUKSI TIGA PHASA
2.1 Umum 6
2.2 Konstruksi Motor Induksi Tiga Phasa 6
2.3 Medan Putar 8
2.4 Prinsip Kerja Motor Induksi Tiga Phasa 12
2.5 Rangkaian Ekivalen Motor Induksi Tiga Phasa 14
2.6 Aliran Daya Pada Motor Induksi Tiga Phasa 20
2.7 Torsi Motor Induksi Tiga Phasa 22
2.8 Torsi Maksimum Motor Induksi Tiga Phasa 28
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
2.10 Disain motor induksi 30
2.11 Penentuan parameter motor induksi 31
III. KARAKTERISTIK PERFORMANSI DAN TEGANGAN TIDAK SETIMBANG PADA MOTOR INDUKSI TIGA PHASA
3.1 Karakteristik Performansi Motor Induksi Tiga Phasa 37
3.2 Tegangan Tidak Setimbang Pada Motor Induksi Tiga Phasa 40
3.3 Rangkaian Ekivalen Motor Induksi Dalam Keadaan 46
Tegangan Tidak Setimbang
3.4 Torsi Dan Daya Pada Motor Induksi Tiga Phasa Pada 46
Keadaan Tegangan Tidak Setimbang
IV. ANALISA PENGARUH TEGANGAN TIDAK SETIMBANG PADA MOTOR INDUKSI TIGA PHASA
4.1 Umum 48
4.2 Peralatan Yang Digunakan 48
4.3 `Percobaan Berbeban Motor Induksi Tiga Phasa Dengan
Tegangan Setimbang 49
4.4 Percobaan Berbeban Motor Induksi Tiga Phasa Dengan
Tegangan Tidak Setimbang 51
4.5 Analisa Pengaruh Tegangan Tidak Setimbang Terhadap Torsi
Dan Effisiensi Motor Induksi Tiga Phasa 53
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
5.1 Kesimpulan 56
5. 2 Saran 56
BAB I PENDAHULUAN 1.1 LATAR BELAKANG
Motor induksi merupakan motor arus bolak – balik yang paling luas
diaplikasikan dalam dunia industri. Hal ini dikarenakan motor ini memiliki
konstruksi yang kuat, sederhana serta membutuhkan perawatan yang tidak banyak.
Selain itu motor ini juga menyediakan effisiensi yang baik dan putaran yang konstan
untuk tiap perubahan beban.
Permasalahan tegangan tidak seimbang yang menyuplai motor induksi tiga
phasa adalah hal yang mungkin saja bisa terjadi dalam keadaan praktis dari
pengoperasian motor induksi tersebut. Berbagai macam gangguan asimetri pada
sistem tenaga, distribusi beban – beban satu phasa tidak merata pada sistem tenaga
yang sama, ataupun kegagalan operasi dari peralatan pengoreksi faktor daya, akan
menimbulkan tegangan tidak setimbang pada saluran penyuplai terminal motor
induksi tiga phasa tersebut.
Adanya ketidakseimbangan tegangan ini akan mempengaruhi operasi dari
motor induksi, yang mana dalam hal ini lebih ditekankan pada permasalahan torsi
dan effisiensi motor induksi tersebut. Hal ini dikarenakan tegangan merupakan salah
satu parameter terpenting dari torsi yang akan dibangkitkan motor induksi, dimana
torsi akan sebanding dengan kuadrat dari tegangan motor.Dengan demikian hal ini
akan menentukan daya output dari motor dan selanjutnya akan menentukan effisiensi
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Oleh karena itu perlu dilakukan suatu kajian baik berupa analisis maupun
penelitian di laboratorium untuk melihat bagaimana ketidaksetimbangan tegangan
memberikan suatu kontribusi yang akan mempengaruhi torsi dan effisiensi dari
motor induksi, dan bagaimana relevansinya terhadap operasi motor induksi tersebut
dalam keadaan tegangan yang setimbang.
1.2 TUJUAN PENULISAN MASALAH
Adapun tujuan penulisan tugas akhir ini adalah :
1. Mengetahui pengaruh tegangan tidak setimbang terhadap karakteristik
mekanis ( torsi – kecepatan ) motor induksi tiga phasa.
2. Mengetahui pengaruh tegangan tidak setimbang terhadap karakteristik
pembebanan Effisiensi ( POUT ) pada motor induksi tiga phasa.
1.3 MANFAAT PENULISAN
1. Laporan tugas akhir ini diharapkan bermanfaat untuk memberikan
informasi kepada penulis dan pembaca yang lain mengenai pengaruh
tegangan tidak setimbang terhadap torsi dan effisiensi motor induksi tiga
phasa.
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
1.4 BATASAN MASALAH
Untuk menghindari pembahasan yang meluas maka penulis akan
membatasi pembahasan tugas akhir ini dengan hal-hal sebagai berikut:
1. Tidak menganalisa gangguan dan harmonisa tegangan yang terjadi pada
sistem tenaga
2. Tidak membahas ketidaksetimbangan tegangan yang disebabkan
ketidaksetimbangan sudut phasa dan tidak melibatkan teori komponen –
komponen simetris dalam analisis tegangan tidak setimbang
3. Tidak membahas pengaruh tegangan tidak setimbang terhadap torsi start dan
torsi maksimum motor induks i
4. Defenisi tegangan tidak setimbang yang digunakan dalam tulisan ini adalah
defenisi yang digunakan oleh NEMA standard MG1. 1993
5. Analisa data berdasarkan peralatan yang tersedia di Laboratorium Konversi
Energi Listrik
1.5 METODE PENULISAN
Metode penulisan yang digunakan dalam penulisan tugas akhir ini adalah:
1. Studi literatur, berupa studi kepustakaan dan kajian dari buku-buku teks
pendukung.
2. Studi diskusi, berupa tanya jawab dengan dosen pembimbing mengenai
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
3. Studi laboratorium, melakukan percobaan untuk mendapatkan data-data yang
diperlukan.
1.6 SISTEMATIKA PENULISAN
Untuk memudahkan pemahaman terhadap tugas akhir ini maka penulis
menyusun sistematika penulisan sebagai berikut:
BAB I : PENDAHULUAN
Bab ini memuat latar belakang masalah, tujuan penulisan, manfaat
penulisan, batasan masalah, metode penulisan, dan sistematika
penulisan.
BAB II : MOTOR INDUKSI TIGA PHASA
Bab ini membahas konstruksi motor induksi tiga phasa, medan
putar, prinsip kerja motor induksi tiga phasa, rangkaian ekivalen
motor induksi tiga phasa, aliran daya pada motor induksi tiga phasa,
torsi motor induksi tiga phasa, dan effisiensi motor induksi tiga
phasa
BAB III : TEGANGAN TIDAK SETIMBANG PADA MOTOR INDUKSI TIGA PHASA
Bab ini membahas mengenai karakteristik performansi motor
induksi jika beroperasi dalam keadaan normal, defenisi tegangan
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
tegangan tidak setimbang, torsi dan daya pada motor induksi pada
keadaan tegangan tidak setimbang
BAB IV : ANALISA PENGARUH TEGANGAN TIDAK SETIMBANG TERHADAP TORSI DAN EFFISIENSI MOTOR INDUKSI TIGA PHASA
Bab ini berisi percobaan – percobaan yang akan dilakukan untuk
melihat pengaruh tegangan tidak setimbang terhadap torsi dan
effisiensi motor induksi tiga phasa. Sehingga dari percobaan
ataupun analisa ini akan diperoleh suatu gambaran yang
menunjukkan karakteristik pembebanan antara effisiensi sebagai
fungsi Pout dan karakteristik torsi kecepatan dari motor induksi.
BAB V : PENUTUP
Bab ini berisi tentang kesimpulan dan saran dari hasil penelitian
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
BAB II
MOTOR INDUKSI TIGA PHASA
2.1 UMUM
Motor induksi merupakan motor arus bolak-balik (AC) yang paling luas
digunakan dan dapat dijumpai dalam setiap aplikasi industri maupun rumah tangga.
Penamaannya berasal dari kenyataan bahwa arus rotor motor ini bukan diperoleh dari
sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya
perbedaan relatif antara putaran rotor dengan medan putar (rotating magnetic field)
yang dihasilkan arus stator.
Motor ini memiliki konstruksi yang kuat, sederhana, handal, serta berbiaya
murah. Di samping itu motor ini juga memiliki effisiensi yang tinggi saat berbeban
penuh dan tidak membutuhkan perawatan yang banyak. Akan tetapi jika
dibandingkan dengan motor DC, motor induksi masih memiliki kelemahan dalam hal
pengaturan kecepatan. Dimana pada motor induksi pengaturan kecepatan sangat
sukar untuk dilakukan, sementara pada motor DC hal yang sama tidak dijumpai.
2.2 KONSTRUKSI MOTOR INDUKSI TIGA PHASA
Motor induksi pada dasarnya memiliki konstruksi stator yang sama dengan
motor sinkron, dan hanya terdapat perbedaan pada konstuksi rotor. Stator dibentuk
dari laminasi – laminasi tipis yang terbuat dari aluminium ataupun besi tuang, dan
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
yang ditunjukkan gambar dua satu. Kumparan ( coil ) dari konduktor – konduktor
yang terisolasi ini kemudian disisipkan ke dalam slot – slot tersebut. Sehingga grup
dari kumparan ini beserta dengan inti yang mengelilinginya membentuk rangkaian
elektromagnetik. Banyaknya jumlah kutub dari motor induksi tergantung pada
hubungan internal dari belitan stator, yang mana bila belitan ini disuplai dengan
sumber tegangan tiga phasa maka akan membangkitkan medan putar.
a) penampang inti stator b) Stator motor induksi
Gambar 2.1
Rotor motor induksi tiga phasa dapat dibedakan menjadi dua jenis yaitu rotor
sangkar (squirrel cage rotor) dan rotor belitan (wound rotor). Rotor sangkar terdiri
dari susunan batang konduktor yang dibentangkan ke dalam slot – slot yang terdapat
pada permukaan rotor dan tiap – tiap ujungnya dihubung singkat dengan
menggunakan shorting rings.
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
a) Rotor Sangkar b) Motor induksi rotor sangkar
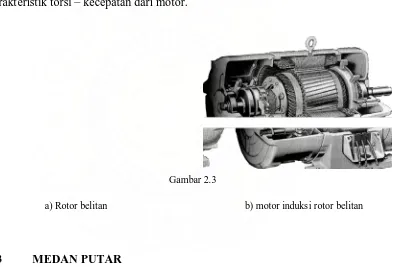
Sementara itu pada rotor belitan, rotornya dibentuk dari satu set belitan tiga
phasa yang merupakan bayangan dari belitan statornya. Biasanya belitan tiga phasa
dari rotor ini terhubung Y dan kemudian tiap - tiap ujung dari tiga kawat rotor
tersebut diikatkan pada slip ring yang berada pada poros rotor. Pada motor induksi
rotor belitan, rangkaian rotornya dirancang untuk dapat disisipkan dengan tahanan
eksternal, yang mana hal ini akan memberikan keuntungan dalam memodifikasi
karakteristik torsi – kecepatan dari motor.
Gambar 2.3
a) Rotor belitan b) motor induksi rotor belitan
2.3 MEDAN PUTAR
Ketika belitan tiga phasa dari motor induksi diberi suplai maka medan
magnet yang berputar akan dihasilkan. Medan magnet ini dibentuk oleh kutub –
kutubnya yang berada pada posisi yang tidak tetap pada stator tetapi berubah – ubah
mengelilingi stator. Adapun magnitud dari medan putar ini selalu tetap yaitu sebesar
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
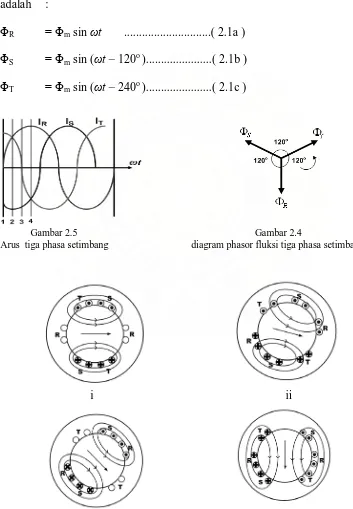
Untuk melihat bagaimana medan putar dibangkitkan, maka dapat diambil
contoh pada motor induksi tiga phasa dengan jumlah kutub dua. Dimana ke-tiga
phasanya R,S,T disuplai dengan sumber tegangan tiga phasa, dan arus pada phasa ini
ditunjukkan sebagai IR, IS, dan IT, maka fluks yang dihasilkan oleh arus – arus ini
adalah :
R = m sin t ...( 2.1a )
S = m sin ( t – 120o)...( 2.1b )
T = m sin ( t – 240o)...( 2.1c )
Gambar 2.5 Gambar 2.4
Arus tiga phasa setimbang diagram phasor fluksi tiga phasa setimbang
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
iii iv
Gambar 2.6
Medan putar pada motor induksi tiga phasa
( i ) Pada keadaan 1 ( gambar2.6 ), t = 0 ; arus dalam phasa R bernilai nol
sedangkan besarnya arus pada phasa S dan phasa T memiliki nilai yang sama dan
arahnya berlawanan. Dalam keadaan seperti ini arus sedang mengalir ke luar dari
konduktor sebelah atas dan memasuki konduktor sebelah bawah. Sementara resultan
fluks yang dihasilkan memiliki besar yang konstan yaitu sebesar 1,5 m dan
dibuktikan sebagai berikut :
R = 0 ; S = m sin ( -120o ) =
( ii ) Pada keadaan 2, arus bernilai maksimum negatif pada phasa S, sedangkan
pada R dan phasa T bernilai 0,5 maksimum pada phasa R dan phasa T, dan pada saat
ini t = 30o
, oleh karena itu fluks yang diberikan oleh masing – masing phasa :
R = m sin ( -120o) = 0,5 m
S= m sin ( -90o ) = - m
T= m sin (-210o) = 0,5 m
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Sehingga resultan fluks r= 0,5 m+ m = 1,5 m.
Dari gambar diagram phasor tersebut dapat dilihat bahwa resultan fluks berpindah
sejauh 30o dari posisi pertama.
( iii ) Pada keadaan ini t = 60o, arus pada phasa R dan phasa T memiliki besar
yang sama dan arahnya berlawanan ( 0,866 m ), oleh karena itu fluks yang
diberikan oleh masing – masing phasa :
R = m sin ( 60o ) =
2 3
m
S= m sin ( -60o ) =
2 3
− m
T= m sin ( -180o ) = 0
Maka magnitud dari fluks resultan : r = 2 x
2 3
m cos 30o = 1,5 m
Dari gambar diagram phasor tersebut dapat dilihat bahwa resultan fluks berpindah
sejauh 60o dari posisi pertama.
( iv ) Pada keadaan ini t = 90o, arus pada phasa R maksimum ( positif), dan arus
p ad a p hasa S d an phasa T = 0 ,5 m , oleh karena itu fluks yang diberikan oleh
masing – masing phasa
R = m sin ( 90o) = m
S= m sin ( -30o ) = - 0,5 m
T= m sin (-150o) = - 0,5 m
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Sehingga resultan fluks r= 0,5 m+ m = 1,5 m.
Dari gambar diagram phasor tersebut dapat dilihat bahwa resultan fluks berpindah
sejauh 90o dari posisi pertama.
2.4 PRINSIP KERJA MOTOR INDUKSI TIGA PHASA
Pada motor induksi tidak terdapat hubungan listrik antara stator dengan
rotor, karena arus pada rotor merupakan arus induksi. Jika belitan stator diberi
tegangan tiga phasa, maka pada stator akan dihasilkan arus tiga phasa, arus ini
kemudian akan menghasilkan medan magnet yang berputar dengan kecepatan
sinkron.
Ketika medan magnetik memotong konduktor rotor, di dalam konduktor
tersebut akan diinduksikan ggl yang sama seperti ggl yang diinduksikan dalam lilitan
sekunder transformator oleh fluksi primer. Rangkaian rotor merupakan rangkaian
tertutup, baik melalui cincin ujung maupun tahanan luar. Ggl induksi menyebabkan
arus mengalir di dalam konduktor rotor. Sehingga dengan adanya aliran arus pada
konduktor rotor di dalam medan magnet yang dihasilkan stator, maka akan
dibangkitkan gaya ( F ) yang bekerja pada motor.
Untuk memperjelas prinsip kerja motor induksi tiga phasa, maka dapat
dijabarkan dalam beberapa langkah berikut:
1. Pada keadaan beban nol ketiga phasa stator yang terhubung dengan sumber
tegangan tiga phasa yang setimbang akan menghasilkan arus pada tiap belitan
phasa arus pada tiap phasa menghasilkan fluksi bolak – balik yang berubah –
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
2. amplitudo fluksi yang dihasilkan berubah secara sinusoidal dan arahnya tegak
lurus terhadap belitan phasa
3. akibat fluksi yang berputar timbul ggl pada stator motor yang besarnya :
)
5. resultan dari ketiga fluksi bolak – balik tersebut menghasilkan medan putar
yang bergerak dengan kecepatan sinkron ns yang besarnya ditentukan oleh
jumlah kutub p dan frekuensi stator f yang dirumuskan :
)
6. fluksi yang berputar tersebut akan memotong batang konduktor pada rotor.
Akibatnya pada kumparan rotor timbul tegangan induksi sebesar E2 yang
besarnya E2 = 4,44 fN2 m (volt)...( 2.5 )
Dimana:
E2 = tegangan induksi pada rotor saat rotor dalam keadaan diam (volt)
N2 = jumlah lilitan rotor
m = fluksi maksimum (Wb)
7. karena kumparan rotor merupakan rangkaian tertutup, maka ggl tersebut akan
menghasilkan arus I2
8. adanya arus I2 di dalam medan magnet akan menimbulkan gaya F pada rotor
9. bila kopel mula yang dihasilkan oleh gaya F cukup besar untuk memikul
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
10.perputaran rotor akan semakin meningkat hingga mendekati kecepatan
sinkron. Perbedaan kecepatan medan putar stator (ns) dengan kecepatan rotor
(nr) disebut slip (s) dan dinyatakan dengan :
11.pada saat rotor dalam keadaan berputar, besarnya tegangan yang terinduksi
pada kumparan rotor akan bervariasi tergantung besarnya slip. Tegangan
induksi ini dinyatakan dengan E2s yang besarnya :
E2s = 4,44 sfN2 m (volt)...( 2.7 )
dimana :
E2s = tegangan induksi rotor dalam keadaan berputar (volt)
f2 = sf = frekuensi rotor ( frekuensi tegangan induksi pada rotor
dalam keadaan berputar )
12.bila ns = nr, tegangan tidak akan terinduksi dan arus tidak akan mengalir pada
kumparan rotor, sehingga tidak akan dihasilkan kopel. Kopel akan dihasilkan
jika nr< ns.
2.5 RANGKAIAN EKIVALEN MOTOR INDUKSI TIGA PHASA
Operasi dari motor induksi tergantung pada induksi arus dan tegangan di
dalam rangkaian rotor yang berasal dari rangkaian stator karena adanya aksi
transformator. Karena induksi arus dan tegangan pada motor induksi pada dasarnya
sama dengan operasi transformator, maka rangkaian ekivalen motor induksi akan
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
sebagai singly excited machine, sebab daya hanya disuplai dari rangkaian stator.
Karena motor induksi tidak memiliki rangkaian medan, maka pada
modelnya tidak akan terdapat sumber tegangan internal EA sebagaimana dijumpai
pada mesin sinkron.
Rangkaian ekivalen per phasa dari transformator dapat menggantikan
operasi dari motor induksi. Sebagaimana halnya pada transformator, maka akan
terdapat tahanan (R1) dan induktansi sendiri (X1) pada belitan stator yang
direpresentasikan dalam rangkaian ekivalen mesin.
Gambar 2.7 Rangkaian ekivalen motor induksi sebagai model transformator
Tegangan stator E1 dikopel terhadap sisi sekunder ER sebagaimana halnya
transformator ideal dengan rasio belitan effektif aeff. Rasio belitan ini dengan mudah
dapat ditentukan pada motor induksi rotor belitan, yang mana pada dasarnya rasio ini
merupakan banyaknya konduktor per phasa pada stator terhadap jumlah konduktor
per phasa pada rotor. Akan tetapi tidak demikian halnya pada motor induksi sangkar
tupai, karena tidak terdapatnya belitan pada rotor motor tersebut.
Tegangan ER pada rotor akan menghasilkan arus, karena rangkaian rotornya
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Impedansi rangkaian primer dan arus magnitisasi dari motor induksi sama
halnya dengan komponen - komponen yang dijumpai pada transformator. Hal yang
membedakan rangkaian ekivalen tersebut pada motor induksi dikarenakan
terdapatnya variasi frekuensi pada tegangan rotor (ER), impedansi rotor RR dan jXR.
Ketika tegangan diberikan pada belitan stator, maka tegangan akan
diinduksikan pada belitan rotornya. Pada umumnya, gerak relatif yang lebih besar di
antara rotor dan medan putar stator, akan menghasilkan tegangan dan frekuensi rotor
yang lebih besar juga. Gerak relatif yang terbesar terjadi saat rotor dalam keadaaan
diam atau disebut juga dalam keadaan blocked rotor. Sebaliknya, frekuensi dan
tegangan terendah timbul saat rotor berputar pada kecepatan yang sama dengan
kecepatan sinkron, sehingga tidak terdapat pergerakan relatif. Magnitud dan
frekuensi tegangan induksi rotor pada saat berputar sebanding dengan slip dari
rotornya. Sehingga, besarnya tegangan induksi rotor dalam kondisi rotor terkunci
disebut ERO, sedangkan untuk slip pada suatu putaran tertentu dirumuskan dengan:
ER = sERO...(2.8)
Dan frekuensi tegangan induksi pada slip tertentu :
fr = sfe...(2.9)
Tahanan dari rotor RR bernilai konstan/ tidak tergantung pada slip,
sementara itu pada reaktansi rotor besarnya akan dipengaruhi oleh slip.
Reaktansi dari rotor tergangtung pada induktansi rotor, frekuensi tegangan
rotor dan arus pada rotor. Bila induktansi rotor LR, maka reaktansi rotor adalah :
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009 R
Rangkaian ekivalen rotor dapat dilihat pada gambar 2.9 :
Gambar 2.8 model rangkaian rotor motor induksi
Dari gambar 2.9 arus pada rotor dapat ditentukan sebagai :
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
XR = reaktansi rotor ( )
Untuk mempermudah penganalisaan, maka rangkaian ekivalen motor induksi pada
gambar 2.8 dapat dilihat dari sisi stator, seperti gambar 2.9 :
Gambar 2.9 Rangkaian ekivalen per phasa motor induksi
Seperti halnya pada transformator, tegangan, arus, dan impedansi sisi
sekunder dapat digantikan ke sisi primer sesuai dengan rasio belitannya, sehingga hal
yang sama juga berlaku untuk untuk motor induksi.
Vp = Vs = a Vs ...(2.14)
Ip = I’s = Is/a...(2.15)
Z’s = a2Zs...(2.16)
Secara eksak urutan transformasi yang sama dapat dilakukan untuk rangkaian rotor
motor induksi. Jika rasio belitan effektif dari motor induksi adalah aeff, kemudian
tegangan rotor ditransformasikan menjadi:
E1 = E’R = aeff ERO...(2.18)
Arus rotor menjadi: I2 = IR/ aeff...(2.19)
Dan impedansi rotor menjadi
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Atau dapat juga didefenisikan dengan :
R2 = a2eff RR... (2.21)
X2 = a2eff XRO... (2.22)
Apabila rugi – rugi tembaga dipisahkan dengan besarnya daya yang
dikonversikan menjadi daya mekanik, maka rangkaian ekivalennya adalah seperti
pada gambar 2.10
Gambar 2.10 Rangkaian ekivalen motor induksi dengan adanya pemisahan rugi – rugi rotor
Dalam teori transformator, analisa rangkaian ekivalen sering disederhanakan
dengan mengabaikan seluruh cabang magnetisasi atau dengan memindahkan
langsung ke terminal primer. Pendekatan demikian tidak dibenarkan dalam motor
induksi yang bekerja dalam keadaan normal, karena adanya celah udara yang
menjadikan perlunya suatu arus magnetisasi yang sangat besar (30% sampai 40%
dari arus beban penuh). Untuk itu dalam rangkaian ekivalen RC dapat diabaikan.
Rangkaian ekivalennya adalah seperti pada gambar 2.11 :
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
2.6 ALIRAN DAYA PADA MOTOR INDUKSI TIGA PHASA
Daya listrik disuplai ke stator motor induksi diubah menjadi daya mekanik
pada poros motor. Berbagai rugi – rugi yang timbul selama proses konversi energi
listrik antara lain :
1. rugi – rugi tetap ( fixed losses ), terdiri dari :
rugi – rugi inti stator (PCORE)
PCORE = 3 E12GC...(2.23)
rugi – rugi gesek dan angin
2. rugi – rugi variabel, terdiri dari :
rugi – rugi tembaga stator (PSCL)
PSCL = 3 I12 R1...(2.24)
rugi – rugi tembaga rotor ( PRCL)
PRCL = 3 I22 R2...(2.25)
Daya pada celah udara (PAG)dapat dirumuskan dengan :
PAG = Pin – PSCL - PCORE...(2.26)
Jika dilihat pada rangkaian rotor, satu – satunya elemen pada rangkaian ekivalen
yang mengkonsumsi daya pada celah udara adalah resistor R2/s. Oleh karena itu daya
pada celah udara dapat juga ditulis dengan :
s R I 3
P 2 2
2
AG = ...(2.27)
Apabila rugi – rugi tembaga dan rugi – rugi inti dikurangi dengan daya input motor,
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Besarnya daya mekanik yang dibangkitkan motor adalah:
...(2.28)
Dari persamaan 2.25 dan 2.27 dapat dinyatakan hubungan rugi – rugi tembaga
dengan daya pada celah udara :
PRCL = s PAG ...(2.29)
Karena daya mekanik yang dibangkitkan pada motor merupakan selisih dari daya
pada celah udara dikurangi dengan rugi – rugi tembaga rotor, maka daya mekanik
dapat juga ditulis dengan :
Pconv = (1 – s ) PAG...(2.30)
Daya output akan diperoleh apabila daya yang dikonversikan dalam bentuk daya
mekanik dikurangi dengan rugi – rugi gesek dan angin. Gambar 2.12 menunjukkan
aliran daya pada motor induksi tiga phasa :
Gambar 2.12
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
2.7 TORSI MOTOR INDUKSI TIGA PHASA
Dari rangkaian ekivalen dan diagram aliran daya motor induksi tiga phasa
yang telah diperoleh sebelumnya dapat diturunkan suatu rumusan unum untuk torsi
induksi sebagai fungsi dari kecepatan. Torsi motor induksi diberikan oleh persamaan:
ind =
m conv
P
ω ...(2.31)
ind =
sync AG
P
ω ...(2.32)
Persamaan yang terakhir di atas sangat berguna, karena kecepatan sinkron
selalu bernilai konstan untuk tiap – tiap frekuensi dan jumlah kutub yang diberikan
motor. Karena kecepatan sinkron selalu tetap, maka daya pada celah udara akan
menentukan besar torsi induksi pada motor.
Meskipun terdapat berbagai cara menyelesaikan rangkaian seperti gambar
2.11, untuk menentukan besarnya arus I2, kemungkinan penyelesaian yang paling
mudah dapat dilakukan dengan menentukan rangkaian ekivalen Thevenin dari
gambar tersebut.
Agar dapat menghitung ekivalen Thevenin dari sisi input rangkaian
ekivalen motor induksi, pertama – tama terminal X’s dihubung buka (open - circuit ),
kemudian tegangan open circuit di terminal tersebut ditentukan. Untuk menentukan
impedansi Thevenin, maka tegangan phasa dihubung singkat ( short – circuit ) dan
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
(
)
2Gambar 2.13 Tegangan ekivalen Thevenin pada sisi rangkaian input
Dari gambar 2.13 ditunjukkan bahwa terminal di open – circuit untuk
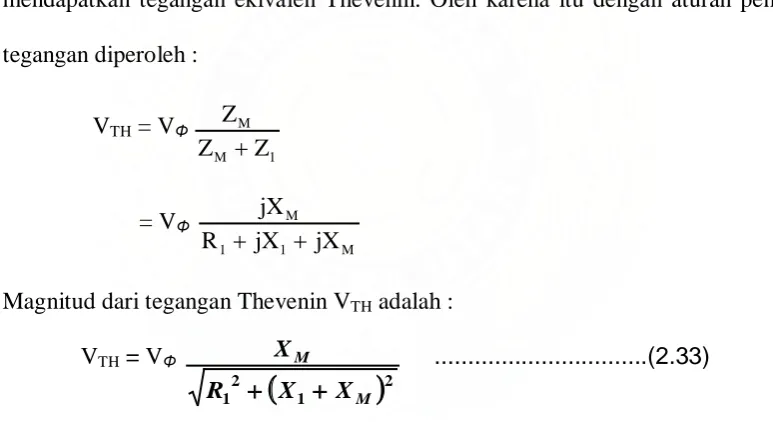
mendapatkan tegangan ekivalen Thevenin. Oleh karena itu dengan aturan pembagi
tegangan diperoleh :
Magnitud dari tegangan Thevenin VTH adalah :
VTH = V ...(2.33)
Karena reaktansi magnetisasi XM >> X1 dan XM >> R1, harga pendekatan dari
magnitud tegangan ekivalen Thevenin :
VTH≈ V . ...(2.34)
Gambar 2.14 menunjukkan tegangan input dihubung singkat. Impedansi
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Gambar 2.14 impedansi ekivalen Thevenin pada sisi rangkaian input
Impedansi Thevenin ZTH diberikan oleh :
ZTH =
pendekatan diberikan oleh :
RTH≈ R1
XTH≈X1
Gambar di bawah menunjukkan rangkaian ekivalen Thevenin :
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Dari gambar di atas arus I2 diberikan oleh :
Magnitud dari arus
I2 =
Daya pada celah udara diberikan oleh :
PAG = 3 I22
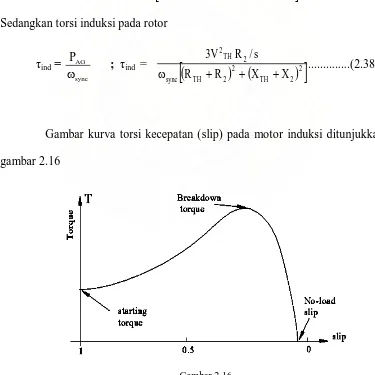
Sedangkan torsi induksi pada rotor
ind =
Gambar kurva torsi kecepatan (slip) pada motor induksi ditunjukkan pada
gambar 2.16
Gambar 2.16
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Sedangkan kurva torsi - kecepatan motor induksi yang menunjukkan
kecepatan di luar daerah operasi normal ditunjukkan pada gambar 2.17
Gambar 2.17
Karakteristik torsi – putaran pada motor induksi
pada berbagai daerah operasi
Dari kedua kurva karakteristik torsi motor induksi di atas dapat diambil beberapa
kesimpulan sebagai berikut :
1. Torsi motor induksi akan bernilai nol pada saat kecepatan sinkron
2. kurva torsi – kecepatan mendekati linear di antara beban nol dan beban
penuh. Dalam daerah ini, tahanan rotor jauh lebih besar dari reaktansi rotor,
oleh karena itu arus rotor, medan magnet rotor, dan torsi induksi meningkat
secara linear dengan peningkatan slip.
3. Akan terdapat torsi maksimum yang tak mungkin akan dapat dilampaui. Torsi
ini disebut juga dengan pull – out torque atau break down torque, yang
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
4. Torsi start pada motor sedikit lebih besar daripada torsi beban penuhnya, oleh
karena itu motor ini akan start dengan suatu beban tertentu yang dapat
disuplai pada daya penuh.
5. torsi pada motor akan memberikan harga slip yang bervariasi sebagai harga
kuadrat dari tegangan yang diberikan. Hal ini sangat penting dalam
membentuk pengaturan kecepatan dari motor.
6. jika rotor motor induksi digerakkan lebih cepat dari kecepatan sinkron,
kemudian arah dari torsi induksi di dalam mesin menjadi terbalik dan mesin
akan bekerja sebagai generator, yang mengkonversikan daya mekanik
menjadi daya elektrik.
7. jika motor induksi bergerak mundur relatif arah dari medan magnet, torsi
induksi mesin akan menghentikan mesin dengan sangat cepat dan akan
mencoba untuk berputar pada arah yang lain. Karena pembalikan arah medan
putar merupakan suatu aksi penyaklaran dua buah phasa stator, maka cara
seperti ini dapat digunakan sebagai suatu cara yang sangat cepat untuk
menghentikan motor induksi. Cara menghentikan motor seperti ini disebut
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
(
)
22.8 TORSI MAKSIMUM MOTOR INDUKSI
Karena torsi induksi bernilai ind = PAG/ sync, maka torsi maksimum yang
mungkin terbentuk jika daya pada celah udara maksimum. Karena daya pada celah
udara sama dengan daya yang dikonsumsi oleh resistor R2/s, torsi induksi akan
maksimum ketika daya yang dikonsumsi oleh resistor maksimum.
Transfer daya terhadap resistor R2/s akan maksimum jika magnitud dari
impedansi sama dengan magnitud dari impedansi sumber. Dari rangkaian ekivalen
Thevenin impedansi sumber dari rangkaian :
Zsource = RTH + jXTH + jX2...(2.39)
Oleh karena itu transfer daya maksimum adalah :
...(2.40)
atau slip pada saat torsi maksimum ;
smaks = ...(2.41)
Oleh karena itu slip dari rotor saat torsi maksimum secara langsung sebanding
dengan tahanan rotor. Sedangkan torsi maksimum dapat ditentukan sebagai berikut :
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
2.9 EFFISIENSI MOTOR INDUKSI TIGA PHASA
Effisiensi dari suatu motor induksi didefenisikan sebagai ukuran
keeffektifan motor induksi untuk mengubah energi listrik menjadi energi mekanik
yang dinyatakan sebagai perbandingan / rasio daya output ( keluaran ) dengan daya
input ( masukan ), atau dapat juga dirumuskan dengan :
...(2.43)
Dari persamaan di atas dapat dilihat bahwa effisiensi motor tergantung pada
besarnya rugi – rugi. Pada dasarnya metode yang digunakan untuk menentukan
effisiensi motor induksi bergantung pada dua hal apakah motor itu dapat dibebani
secara penuh atau pembebanan simulasi yang harus digunakan.
Effisiensi dari motor induksi dapat diperoleh dengan melakukan pengujian
beban nol dan pengujian hubung singkat. Dari pengujian beban nol akan diperoleh
rugi – rugi rotasi yang terdiri dari rugi – rugi mekanik dan rugi – rugi inti. Rugi –
rugi tembaga stator tdk dapat diabaikan sekalipun motor berbeban ringan ataupun
tanpa beban. Persamaan yang dapat digunakan untuk motor tiga phasa ini adalah :
1
Dari ke dua rumus di atas dapat dinyatakan bahwa rugi – rugi daya = total
daya input – rugi tembaga stator. Situasi ini tepat karena rotor tidak dibebani sewaktu
sedang beroperasi sehingga slipnya sangat kecil oleh karena itu arus, dan rugi – rugi
tembaga rotor diabaikan.
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Dari pengujian hubung singkat akan dihasilkan parameter rotor. Daya total
yang dialirkan ke motor sewaktu tegangan dikurangi selama pengujian ini,
didissipasikan dalam rugi – rugi tembaga stator dan rugi – rugi tembaga rotor.
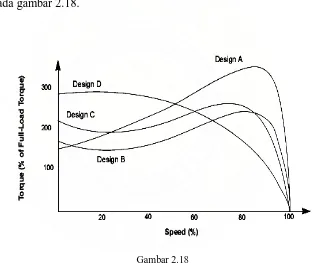
2.10 DISAIN MOTOR INDUKSI TIGA PHASA
Standard NEMA pada dasarnya mengkategorikan motor induksi ke dalam
empat kelas yakni disain A,B,C, dan D. Karakteristik torsi – kecepatannya dapat
dilihat pada gambar 2.18.
Gambar 2.18
Karakteristik torsi kecepatan motor induksi
Pada berbagai disain
Kelas A : disain ini memiliki torsi start normal (150 – 170%) dari nilai
ratingnya) danarus start relatif tinggi. Torsi break down nya merupakan yang
paling tinggi dari semua disain NEMA. Motor ini mampu menangani beban
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Kelas B : merupakan disain yang paling sering dijumpai di pasaran. Motor
ini memiliki torsi start yang normal seperti halnya disain kelas A, akan tetapi
motor ini memberikan arus start yang rendah. Torsi locked rotor cukup baik
untuk menstart berbagai beban yang dijumpai dalam aplikasi industri. Slip
motor ini < =5 %. Effisiensi dan faktor dayanya pada saat berbeban penuh
tinggi sehingga disain ini merupakan yang paling populer. Aplikasinya dapat
dijumpai pada pompa, kipas angin/ fan, dan peralatan – peralatan mesin.
Kelas C : memiliki torsi start lebih tinggi (200 % dari nilai ratingnya) dari
dua disain yang sebelumnya. Aplikasinya dijumpai pada beban – beban
seperti konveyor, mesin penghancur (crusher ), komperessor,dll. Operasi dari
motor ini mendekati kecepatan penuh tanpa overload dalam jumlah besar.
Arus startnya rendah, slipnya < = 5 %
Kelas D : memiliki torsi start yang paling tinggi. Arus start dan kecepatan
beban penuhnya rendah. Memiliki nilai slip yang tinggi ( 5 -13 % ), sehingga
motor ini cocok untuk aplikasi dengan perubahan beban dan perubahan
kecepatan secara mendadak pada motor. Contoh aplikasinya : elevator, crane,
dan ekstraktor.
2.11 PENENTUAN PARAMETER MOTOR INDUKSI
Data yang diperlukan untuk menghitung performansi dari suatu motor
induksi dapat diperoleh dari hasil pengujian tanpa beban, pengujian rotor tertahan,
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
2.11.1 Pengujian Tanpa Beban ( No Load Test )
Pengujian tanpa beban pada motor induksi akan memberikan keterangan
berupa besarnya arus magnetisasi dan rugi – rugi tanpa beban. Biasanya pengujian
tersebut dilakukan pada frekuensi yang diizinkan dan dengan tegangan tiga phasa
dalam keadaan setimbang yang diberikan pada terminal stator. Pembacaan diambil
pada tegangan yang diizinkan setelah motor bekerja cukup lama, agar bagian –
bagian yang bergerak mengalami pelumasan sebagaimanamestinya. Rugi – rugi
rotasional keseluruhan pada frekuensi dan tegangan yang diizinkan pada waktu
dibebani biasanya dianggap konstan dan sama dengan rugi – rugi tanpa beban.
Pada keadaan tanpa beban, besarnya arus rotor sangat kecil dan hanya
diperlukan untuk menghasilkan torsi yang cukup untuk mengatasi gesekan.
Karenanya rugi – rugi I2R tanpa beban cukup kecil dan dapat diabaikan. Pada
transformator rugi – rugi I2R primernya tanpa beban dapat diabaikan, akan tetapi
rugi – rugi stator tanpa beban motor induksi besarnya cukup berarti karena arus
magnetisasinya lebih besar. Besarnya rugi – rugi rotasional PR pada keadaan kerja
normal adalah :
PROT = Pnl – 3 I2nl R1...(2.45)
Dimana Pnl = daya input tiga phasa
Inl = arus tanpa beban tiap phasa ( A )
R1 = tahanan stator tiap phasa ( ohm )
Karena slip pada keadaaan tanpa beban sangat kecil, maka akan
mengakibatkan tahanan rotor R2/s sangat besar. Sehingga cabang paralel rotor dan
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
nl nl R Z2 − 2
dan besarnya reaktansi cabang paralel karenanya sangat mendekati XM. Sehingga
besar reaktansi yang tampak Xnl yang diukur pada terminal stator pada keadaan
tanpa beban sangat mendekati X1 + XM, yang merupakan reaktansi sendiri dari stator,
sehingga
Xnl = X1 + XM...(2.46)
Maka besarnya reaktansi diri stator, dapat ditentukan dari pambacaan alat ukur pada
keadaan tanpa beban. Untuk mesin tiga phasa yang terhubung Y besarnya impedansi
tanpa beban Znl/ phasa :
Znl =
Di mana Vnl merupakan tegangan line, pada pengujian tanpa beban.
Besarnya tahanan pada pengujian tanpa beban Rnl adalah :
Rnl =
Pnl merupakan suplai daya tiga phasa pada keadaan tanpa beban, maka besar
reaktansi tanpa beban
Xnl = ...(2.49)
sewaktu pengujian beban nol, maka rangkaian ekivalen motor induksi seperti gambar 2.19
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009 DC
2.11.2 Pengujian tahanan stator ( DC test )
Untuk menentukan besarnya tahanan stator R1 dilakukan dengan test DC.
Pada dasarnya tegangan DC diberikan pada belitan stator motor induksi. Karena arus
yang disuplai adalah arus DC, maka tidak terdapat tegangan yang diinduksikan pada
rangkaian rotor sehingga tidak ada arus yang mengalir pada rotor. Dalam keadaan
demikian, reaktansi dari motor juga bernilai nol, oleh karena itu, yang membatasi
arus pada motor hanya tahanan stator.
Untuk melakukan pengujian ini, arus pada belitan stator diatur pada nilai
rated, yang mana hal ini bertujuan untuk memanaskan belitan stator pada temperatur
yang sama selama operasi normal. Apabila tahanan stator dihubung Y, maka besar
tahanan stator/ phasa adalah :
...( 2.50 )
Bila stator dihubung delta, maka besar tahanan stator,
DC
Dengan diketahuinya nilai dari R1, rugi – rugi tembaga stator pada beban nol
dapat ditentukan, dan rugi – rugi rotasional dapat ditentukan sebagai selisih dari daya
input pada beban nol dan rugi – rugi tembaga stator. Gambar 3.4 menunjukkan salah
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Gambar 2.20 rangkaian pengukuran untuk test DC 2.11.3. Pengujian Rotor Tertahan ( Block Rotor Test )
Pengujian ini bertujuan untuk menentukan parameter – parameter motor
induksi, dan biasa juga disebut dengan locked rotor test. Pada pengujian ini rotor
dikunci/ ditahan sehingga tidak berputar.
Untuk melakukan pengujian ini, tegangan AC disuplai ke stator dan arus
yang mengalir diatur mendekati beban penuh. Ketika arus telah menunjukkan nilai
beban penuhnya, maka tegangan, arus, dan daya yang mengalir ke motor diukur.
Rangkaian ekivalen untuk pengujian ini ada pada gambar 2.21
Gambar 2.21 rangkaian ekivalen motor induksi pada percobaan block rotor test
Saat pengujian ini berlangsung s = 1 dan tahanan rotor R2/s = R2. Karena
nilai R2 dan X2 begitu kecil, maka arus input akan seluruhnya mengalir melalui
tahanan dan reaktansi tersebut. Oleh karena itu, kondisi sirkit pada saat ini terlihat
seperti kombinasi seri X1, R1, X2, dan R2. Sesudah tegangan dan frekuensi diatur,
arus yang mengalir pada motor diatur dengan cepat, sehingga tidak timbul kenaikan
temperatur pada rotor dengan cepat. Daya input yang diberikan kepada motor
θ = 3V I cos
Pin T L ...( 2.52 )
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
IL = arus line pada saat pengujian berlangsung
ZBR = impedansi hubung singkat
ZBR = RBR + jX’BR
= ZBR cos + j ZBR sin ...( 2.54 )
Tahanan block rotor :
RBR = R1 + R2...( 2.55 )
Sedangkan reaktansi block rotor X’BR = X1’ + X2’
X1’ + X2’ adalah reaktansi stator dan rotor pada frekuensi pengujian
R2 = RBR – R1...( 2.56 )
Nilai dari R1 ditentukan dari test DC. Karena reaktansi berbanding langsung dengan
frekuensi, maka reaktansi ekivalen total ( XBR ) pada saat frekuensi operasi normal
2
Untuk memisahkan harga X1 dan X2, maka dapat digunakan tabel 1
Tabel 1. distibusi reaktansi X1 dan X2 pada berbagai disain motor induksi
Disain kelas motor X1 X2
A 0,5 XBR 0,5 XBR
B 0,4 XBR 0,6 XBR
C 0,3 XBR 0,7 XBR
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
BAB III
KARAKTERISTIK PERFORMANSI DAN TEGANGAN TIDAK SETIMBANG PADA MOTOR INDUKSI TIGA PHASA
3.1 KARAKTERISTIK PERFORMANSI MOTOR INDUKSI TIGA PHASA
Karakteristik pengoperasian motor induksi dalam keadaan steady state secara grafis
menujukkan variasi kecepatan, faktor daya, arus stator, dan effisiensi sebagai fungsi
dari daya output, yang bervariasi dari beban nol hingga ke beban penuh.
Karakteristik pengoperasian motor induksi tersebut ditunjukkan pada gambar 3.1
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Gambar 3.1
Karakteristik operasi motor induksi
3.1.1 Kecepatan
Dalam keadaan tanpa beban, kecepatan rotor mendekati kecepatan sinkron, oleh
karena itu slip beban nol bernilai sangat kecil. Hal ini menyebabkan torsi beban nol
yang dihasilkan hanya cukup untuk mengatasi torsi yang dibutuhkan rugi – rugi
gesek dan angin. Apabila torsi beban ditingkatkan, torsi elektromagnetik akan
meningkat dengan seketika. Dalam keadaan ini kecepatan rotor harus turun karena
torsi beban ditingkatkan.
3.1.2 Faktor Daya
Dalam keadaan tanpa beban, arus stator Ioterdiri dari komponen arus magnetisasi I
dan komponen arus rugi – rugi beban nol. Arus magnetisasi I tertinggal dari
tegangan stator 90o dan komponen rugi – rugi beban nol sephasa dengan V1. Karena
arus magnetisasi I merupakan komponen yang dominan membentuk Io, maka arus
beban nol akan tertinggal dari tegangan stator dengan sudut o yang bernilai antara
80o – 85o. Sebagai akibatnya faktor daya stator pada beban nol sangat rendah, yang
mungkin saja akan bernilai 0.1 – 0.3, dan akan bernilai lebih rendah lagi, jika ukuran
motornya lebih besar lagi. Dalam keadaan berbeban, dua buah komponen di atas
akan mendapat tambahan dari arus stator untuk mengimbangi mmf yang
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Karena motor dibebani maka arus rotor I2 akan terbentuk sedemikian untuk
menyuplai torsi beban. Komponen arus beban I1’ jika dijumlahkan dengan Io,
memberikan arus stator OA pada faktor daya cos 1. Dengan adanya penambahan
beban pada motor, maka arus rotor meningkat dan komponen arus beban I1’ akan
dijumlahkan dengan Io, yang akan memberikan harga arus stator OB pada faktor
daya cos 1. dari gambar diagram vektor tersebut dapat dilihat, bahwa faktor daya
stator akan meningkat apabila beban pada motor meningkat. Faktor daya stator
bernilai antara 0,85 hingga 0,88 yang diperoleh pada kondisi 80 hingga 90 persen
dari output beban penuhnya.
Gambar 3.2
Perbaikan faktor daya dengan adanya pertambahan beban
3.1.3 Effisiensi
Sama halnya dengan mesin – mesin listrik yang lain, pada motor induksi rugi – rugi
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
outputnya sama dengan nol, sehingga effisiensinya bernilai nol. Apabila motor
induksi berbeban ringan, maka rugi – rugi tetap akan lebih besar jika dibandingkan
terhadap outputnya, sehingga effisiensinya rendah. Jika beban meningkat, maka
effisiensinya juga akan meningkat dan akan menjadi maksimum sewaktu rugi – rugi
variabel sama dengan rugi – rugi inti. Effisiensi maksimum terjadi saat 80 hingga 95
persen dari rated output. Jika beban ditingkatkan secara terus – menerus hingga
melampaui effisiensi maksimumnya, rugi – rugi beban akan meningkat dengan
sangat cepat daripada outputnya, sehingga effisiensinya menurun.
3.1.4 Arus Stator
arus beban nol stator bernilai antara 30 – 50 persen dari arus rated. Apabila beban
bertambah maka arus akan meningkat.
3.2 TEGANGAN TIDAK SETIMBANG PADA MOTOR INDUKSI TIGA PHASA
3.2.1 Umum
Dalam sistem tiga phasa yang setimbang, tegangan line – netral memiliki
magnitud yang sama dan tiap – tiap sudut phasanya berbeda 120 derajat satu sama
lain. Apabila terdapat tegangan tiga phasa yang magnitudnya tidak sama dan sudut
fasanya mengalami pergeseran sehingga tidak berbeda 120 derajat satu sama lain,
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Penyebab dari tegangan tidak setimbang termasuk impedansi saluran
transmisi dan saluran distribusi yang tidak sama, distribusi beban – beban satu phasa
yang tidak merata dalam jumlah besar, dan lain – lain. Ketika beban tiga phasa
setimbang dihubungkan dengan sistem suplai yang tidak setimbang, maka arus yang
dialirkan ke beban juga menjadi tidak setimbang. Oleh karena itu sangat sulit / tidak
mungkin untuk menyediakan suatu sistem suplai setimbang yang sempurna kepada
konsumen, sehingga perlu dilakukan berbagai upaya untuk meminimalisasi
ketidaksetimbangan tegangan untuk mereduksi pengaruhnya pada beban – beban
konsumen.
i ii
Gambar 3.3
Diagram vektor untuk sistem tegangan setimbang (i) ; diagram vektor untuk sistem tegangan
tidak setimbang (ii)
3.2.2 Defenisi Tegangan Tidak Setimbang
Metode yang biasa digunakan dalam menganalisa baik arus ataupun tegangan
dalam keadaan tidak setimbang adalah dengan menggunakan komponen – komponen
simetris yaitu suatu metode yang secara matematis memecahkan suatu sistem yang
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
urutan positif, urutan negatif dan urutan nol. Untuk sistem yang setimbang sempurna,
maka sistem urutan negatif dan urutan nol tidak ada.
i ii iii
Gambar 3.4
Diagram vektor tegangan urutan positif (i) ; diagram vektor tegangan urut negatif (ii) ;
Diagram vektor tegangan urut nol (iii)
Sistem urutan ini dapat dilukiskan secara fisika. Arah perputaran dari motor
induksi tiga phasa ketika diaplikasikan dengan tegangan urutan negatif akan
berlawanan arah dengan arah perputaran motor induksi sewaktu diaplikasikan
dengan tegangan urutan positif. Sementara itu sistem urutan nol tidak akan
menimbulkan perputaran pada motor induksi, karena tidak ada perbedaan phasa pada
ketiga tegangannya,sehingga tidak akan dibangkitkan medan putar.
Oleh karena itu ada dua defenisi ketidaksetimbangan pada komponen - komponen
simetris, yaitu ; faktor ketidaksetimbangan urutan negatif dan faktor
ketidaksetimbangan urutan nol ( V1,V2,V0 adalah sytem urutan positif, urutan
negatif, dan urutan nol ). Sistem arus urutan nol tidak dapat mengalir pada sistem
tiga phasa, misalnya motor induksi, oleh karena itu faktor ketidaksetimbangan urutan
nol itu sering diabaikan. Adapun ketidaksetimbangan tegangan urutan negatif
menunjuk pada besarnya tegangan yang mencoba untuk memutar arah motor induksi
tiga phasa pada arah yang berlawanan terhadap yang diberikan oleh tegangan urutan
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009 =
LL
V
_
Adapun faktor ketidaksetimbangan urutan negatif menurut IEC 60034 – 26 adalah :
Dimana :
Dimana dan
Sedangkan menurut NEMA Standard MG1.1993 dan komunitas IEEE defenisi
ketidaksetimbangan itu adalah :
V^LL = tegangan line – line yang tertinggi
harga rata – rata dari tegangan line
Sesuai dengan rumusan yang telah diberikan, dapat dilihat bahwa defenisi tegangan
tidak setimbang yang diberikan NEMA menghindari pemakaian aljabar kompleks,
sehingga kedua rumusan tersebut akan memberikan hasil yang berbeda.
Contoh jika tegangan tidak setimbang :
:
Maka menurut persamaan 3.2 dan 3.3, maka besarnya Vab1 dan Vab2 adalah :
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Maka besarnya ketidaksetimbangan menurut IEC adalah :
Sedangkan menurut NEMA adalah :
Tegangan tidak setimbang dalam persentase yang kecil akan menghasilkan arus tidak
seimbang dalam jumlah besar, yang mana hal ini akan menimbulkan kenaikan
temperatur pada motor. Jika tegangan yang tidak setimbang menyuplai motor
induksi, maka daya kuda nominal dari motor harus dikalikan dengan suatu faktor
seperti yang ditunjukkan gambar 3.5
Gambar 3.5
Kurva penurunan rating motor induksi NEMA
Menurut kurva ini, motor induksi dirancang sedemikian rupa sehingga
mampu menangani ketidaksetimbangan tegangan 1%, dan selanjutnya akan menurun
terganntung pada tingkat ketidaksetimbangan. Operasi pada motor pada harga
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
3.3 Rangkaian Ekivalen Motor Induksi Tiga Phasa Dalam Keadaan Tegangan Tidak Setimbang.
Sewaktu motor induksi tiga phasa bekerja pada keadaan tegangan tidak
setimbang , maka besarnya slip yang dibangkitkan tegangan urutan positif adalah :
Ns = kecepatan sinkron
Nr = kecepatan rotor
Sementara itu besarnya slip yang dibangkitkan oleh tegangan urutan negatif :
Jika s2 dinyatakan dalam s1, maka besarnya s2 adalah :
Dari rumus di atas dapat dilihat bahwa dalam keadaan normal slip urutan positif s1
bernilai sangat kecil, sedangkan slip urutan negatif sangat besar. Impedansi motor
induksi sangat tergantung pada slip, di mana pada saat slip yang tertinggi (misalnya
pada saat start ataupun dalam keadaan rotor terblok) impedansinya kecil dan
sebaliknya pada slip yang rendah akan memiliki impedansi yang besar.
Oleh karena itu secara pendekatan, ratio dari impedansi urutan positif terhadap
urutan negatif diberikan oleh :
...3.5
...3.6
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
...3.8
Karena arus urutan positif bernilai dan arus urutan negatif
maka perbandingan I2 dan I1 dapat dinyatakan sebagai :
Jika dimisalkan motor dalam keadaan rotor terblok memberikan arus sebesar
6 kali arus nominal maka akan memberikan ketidakseimbangan pada arus saluran
motor sebesar 30 % jika ketidakseimbangan tegangan 5 %.
Rangkaian ekivalen motor induksi tiga phasa dalam keadaan tidak setimbang :
a. untuk urutan positif
Gambar 3.6
Rangkaian ekivalen urutan positif pada motor induksi
b. untuk urutan negatif
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
p
Rangkaian ekivalen urutan negatif pada motor induksi
3.3 Torsi Dan Daya Pada Motor Induksi Tiga Phasa Pada Keadaan Tegangan Tidak Setimbang
Dari gambar di atas dapat dilihat bahwa medan putar yang dihasilkan
tegangan urutan positif dan tegangan urutan negatif berada dalam arah yang
berlawanan, maka pengaruh dari tegangan urutan negatif akan mengurangi daya
output dan torsi elektromagnetik Te.
Dari rangkaian ekivalen ,daya internal yang dibangkitkan per phasa adalah
Daya output per phasa :
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
BAB IV
ANALISA PENGARUH TEGANGAN TIDAK SETIMBANG
TERHADAP TORSI DAN EFFISIENSI MOTOR INDUKSI TIGA PHASA
4.1 UMUM
Untuk dapat melihat pengaruh tegangan tidak setimbang terhadap torsi dan
effisiensi motor induksi tiga phasa, maka diperlukan suatu percobaan pembebanan
pada motor induksi yang bekerja dalam keadaan normal dan juga dalam keadaan
abnormal, sehingga diperoleh suatu perbandingan yang dapat menyatakan perbedaan
di antara dua keadaan tersebut.
Pada percobaan ini, pengaruh ketidaksetimbangan tegangan akan dilihat pada
motor induksi tiga phasa rotor belitan, di mana defenisi yang digunakan untuk
menentukan ketidaksetimbangan tegangan adalah defenisi menurut NEMA Standard
MG1.1993.
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
1. Motor induksi tiga phasa
Tipe : rotor belitan
Spesifikasi : - AEG Typ C AM 112MU 4RI
- / Y 220/ 380 V ; 10,7 / 6,2 A
- 2,2 Kw, cos 0,67
- 1410 rpm, 50 Hz
- Kelas isolasi : B
2. Mesin DC
3. Ampermeter
4. Voltmeter
5. Tahanan geser
6. Power Suplai ( AC dan DC )
7. Timbangan torsi
8. Tachometer
4.3 Percobaan Pembebanan Motor Induksi Dengan Tegangan Setimbang
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Gambar 4.1 Rangkaian percobaan pembebanan motor induksi dengan tegangan setimbang
2. Prosedur percobaan
a. Motor induksi dikopel dengan motor DC, kemudian rangkaian
pengukuran disusun seperti gambar 4.1
b. Seluruh switch dalam keadaan terbuka dan pengatur tegangan dalam
posisi minimum, sedangkan posisi tahanan R maksimum.
c. Switch S1 ditutup, pengatur PSAC1 dinaikkan sampai dengan
tegangan 330 Volt.
d. Switch S3 ditutup, pengatur PSDC2 dinaikkan hingga A3
menunjukkan arus penguat nominal.
e. Switch S2 ditutup. Kemudian tahanan R diturunkan secara bertahap.
Penunjukan W, T, dan N dicatat untuk setiap tahapnya.
f. Percobaan selesai
3. Data hasil pengukuran
Tabel 5 data percobaan pembebanan motor induksi dengan tegangan setimbang
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
4.4 Percobaan Pembebanan Motor Induksi Dengan Tegangan Tidak Setimbang
Rangkaian percobaan
Gambar 4.2 Rangkaian percobaan pembebanan motor induksi dengan tegangan tidak setimbang
1. Prosedur percobaan
a. Motor induksi dikopel dengan motor DC, kemudian rangkaian
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
b. Seluruh switch berada dalam keadaan terbuka. Tahanan R2 dan posisi
pengatur tegangan yang ada dalam keadaan minimum, sedangkan
tahanan R1 berada dalam posisi maksimum.
c. Switch S1 ditutup, pengatur PSAC1 dinaikkan sampai tegangan
tertentu
d. Switch S3 ditutup, pengatur PSDC2 dinaikkan hingga A5
menunjukkan arus penguat nominal
e. Tahanan R2 diatur, sehingga terdapat pembacaan tegangan yang
berbeda pada alat ukur V1, V2, dan V3.
f. Switch S2 ditutup, sehingga generator DC menyuplai tahanan R1
pada posisi maksimum. Pada saat ini penunjukan tiap – tiap voltmeter,
amperemeter dan wattmeter dicatat.
g. Tahanan R1 diturunkan secara perlahan hingga menunjukkan harga
torsi yang mendekati sama dengan torsi yang diperoleh pada
percobaan dengan tegangan setimbang. Untuk memperoleh harga torsi
yang harganya mendekati sama dengan torsi yang diperoleh pada
percobaan berbeban dengan tegangan setimbang, maka dapat
dilakukan dengan penambahan arus medan pada generator DC,
setelah penurunan tahanan R1 dilakukan. Dan tiap – tiap perubahan
R1, besarnya penunjukan voltmeter, ampermeter, dicatat.
h. Percobaan selesai
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
%
Tabel 6 Data percobaan pembebanan motor induksi dengan tegangan tidak setimbang
VRS = 325 V ; VST = 335 V ; VRT = 294 V
4.5 Analisa Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa
Dari harga VRS = 325 V ; VST = 335 V ; VRT = 294 V , maka besarnya tegangan
rata – rata
_
V adalah :
Dari persamaan 3.4, maka besar ketidaksetimbangan tegangan adalah :
Harga di atas menunjukkan suatu harga di mana motor induksi sudah tidak
diizinkan lagi beroperasi.
Contoh perhitungan untuk memperoleh T (N.m)
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
T = (m . g .l) /1000 ; T = ( 200 . 10 . 0,5)/1000 = 1 N.m
Contoh perhitungan untuk memperoleh n (rad/s)
n = (2 /60) . N ; n = (2 /60) . 1375 = 143,92 rad/s
Contoh perhitungan untuk Pout
Pout = T . n ; Pout = 1 . 143,92 = 143,92 Watt
Contoh perhitungan untuk (%)
= Pout / Pin = (143,92 / 550) . 100 % = 26,17 %
Kurva yang menggambarkan karakteristik torsi kecepatan motor induksi, apabila
tegangan terminal motor tersebut setimbang adalah :
Gambar 4.3
Karakteristik torsi berbeban – kecepatan dengan tegangan setimbang
Apabila terminal motor menerima tegangan tidak setimbang, maka karakteristik
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Gambar 4.4
Karakteristik torsi berbeban – kecepatan dengan tegangan tidak setimbang
Kurva karakteristik yang menunjukkan effisiensi motor induksi sebagai fungsi dari
daya output Pout, jika tegangan terminalnya setimbang :
Gambar 4.5
Karakteristik Pout – effisiensi dengan tegangan setimbang
Sedangkan kurva karakteristik dari effisiensi sebagai fungsi dari daya output pada
Henry A. Siregar : Pengaruh Tegangan Tidak Setimbang Terhadap Torsi Dan Effisiensi Motor Induksi Tiga Phasa, 2008.
USU Repository © 2009
Gambar 4.6
Karakteristik Pout – effisiensi dengan tegangan tidak setimbang
BAB V PENUTUP
5.1 KESIMPULAN
1. Tegangan tidak setimbang pada motor induksi akan menurunkan kecepatan
motor, tanpa mengurangi besar torsi berbebannya. Dari perbandingan ke dua
karakteristik torsi kecepatan tersebut dapat dilihat bahwa pada saat motor
berbeban ringan, tegangan tidak setimbang tidak akan memberikan pengaruh
yang berarti terhadap putaran motor. Apabila beban terus bertambah, maka
penurunan kecepatan putaran motor dalam keadaan tegangan tidak setimbang
akan lebih besar daripada motor yang beroperasi dengan keadaan normal.
2. Tegangan tidak setimbang pada motor induksi akan menyebabkan penurunan keseluruhan effisisensi motor, baik effisiensinya saat saat berbeban ringan