DAFTAR PUSTAKA
[1] Zuhal, “Dasar Teknik Tenaga Listrik dan Elektronika Daya”, Penerbit ITB,
Bandung, 1988
[2] International Electrotechnical Commission, Rotating Electrical Machines. Part
26 (IEC 60034-26) Effect of Unbalanced Voltages on The Performance of
Induction Motor. Ginegra. IEC 2002. 15 P
[3] NEMA Standard Publications No. MGI-1993. Motors and Generators,
Published by National Electrical Manufactures Ascociation. Washington
(1993), Part 21 PP. 9-10 and Part 30 PP. 1-2
[4] IEEE Guides: Test Procedures for Synchronus Machines, IEEE Std 115-1995
(R2002)
[5] Theraja, B.L. & Theraja, A.K., “A Text Book of Electrical Technology”, New
Delhi, S.Chand and Company Ltd., 2001.
[6] Chapman Stephen J, “Electric Machinery Fundamentals”,Third Edition Mc
Graw Hill Companies, New York, 1999.
[7] Wijaya Mochtar,”Dasar-dasar Mesin Listrik”, Penerbit Djambatan, Jakarta ,
27
BAB III
METODE PENELITIAN
3.1 Tempat dan Waktu
Penelitian akan dilaksanakan pada Laboratorium Konversi Energi Listrik
Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara.
Penelitian akan dilaksanakan setelah selesai seminar proposal telah disetujui.
Lama penelitian direncanakan selama 2 (dua) bulan.
3.2 Peralatan yang Digunakan 1. Motor induksi tiga phasa
Tipe : rotor belitan
Spesifikasi :
- AEG Typ C AM 112MU 4RI
- Δ / Υ 220/ 380 V ; 10,7/ 6,2 A
- 2,2 Kw, cos ϕ 0,67
- Kelas Isolasi : B
2. Mesin DC
3. Amperemeter
4. Voltmeter
5. Tahanan Geser
6. Power Suplai ( AC dan DC )
7. Tachometer
28 3.3 Variable yang Diamati
Variable – variable yang diamati dalam penelitian ini meliputi :
- Persentasi ketidakseimbangan tegangan yang mencatu motor
- Lamanya waktu operasi motor
- Perubahan nilai resistansi motor yang diukur dengan percobaan DC test
pada saat perubahan persentasi ketidakseimbangan dan beban yang dipikul
motor
- Perubahan yang terukur oleh thermometer infrared untuk setiap perubahan
persentasi ketidakseimbangan dan beban yang dipikul motor
3.4 Prosedur Penelitian
Adapun prosedur pengambilan data dalam penelitian ini adalah sebagai
berikut:
1. Merangkai rangkaian percobaan
Sebelum melakukan percobaan, terlebih dahulu merangkai rangkaian
percobaan sesuai dengan percobaan yang dilakukan. Adapun rangkaian percobaan
yang akan digunakan seperti gambar yang terlihat berikut:
1.1 Rangakaian percobaan pengukuran suhu motor induksi tiga phasa dengan
29
Gambar 3.1 Rangakaian percobaan pengukuran suhu motor induksi tiga phasa
dengan menggunakan thermometer infrared
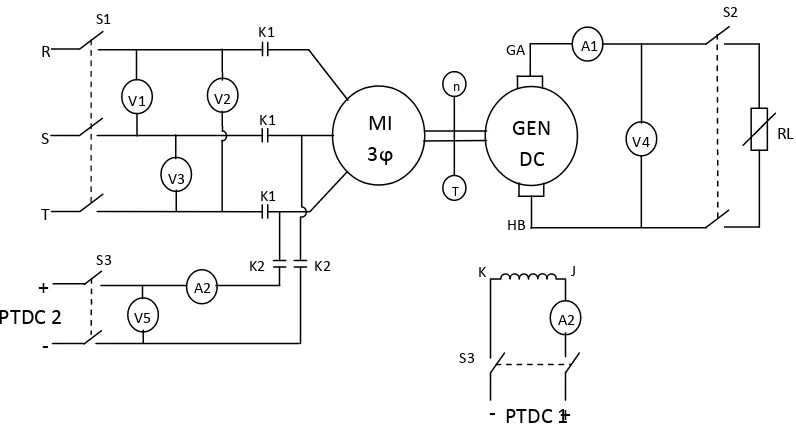
1.2 Rangakaian percobaan pengukuran suhu motor induksi tiga phasa dengan
menggunakan metode pengukuran resistansi
Gambar 3.2 Rangakaian percobaan pengukuran suhu motor induksi tiga phasa
30
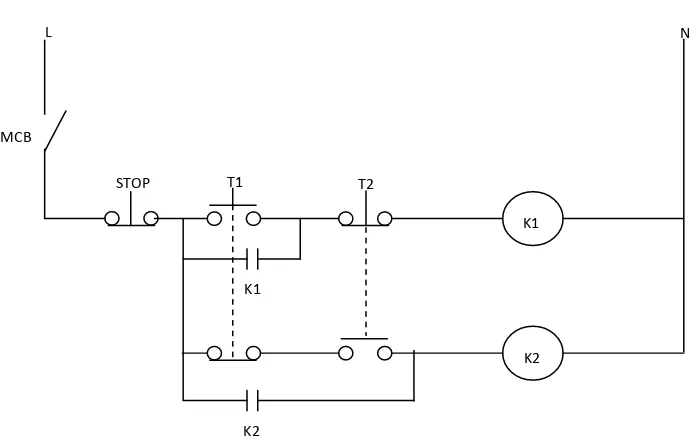
Gambar 3.3 Rangkaian kontrol pengukuran resistansi dengan DC test
2. Pengambilan data
Prosedur percobaan yang dilakukan yaitu sebagai berikut :
- Pengukuran suhu menggunakan thermometer infrared
1. Motor induksi tiga phasa dikopel dengan motor DC, kemudian rangkaian
pengukuran disusun seperti gambar 3.1
2. Seluruh switch dalam keadaan terbuka dan pengatur tegangan dalam
posisi minimum.
3. Switch S1 ditutup, kemudian PTAC dinaikkan sampai tegangan seimbang
(untuk percobaan tegangan seimbang) dan tegangan tidak seimbang
(untuk percobaan tegangan tidak seimbang).
4. Switch S3 ditutup, kemudian PTDC dinaikkan hingga A2 menunjukkan
arus penguat nominal.
5. Switch S2 ditutup, kemudian tahanan RL dinaikkan dan dijaga konstan.
K1
K2 MCB
STOP T1 T2
L N
K1
31
6. Selama 30 menit untuk setiap kenaikan waktu 5 menit, suhu dicatat
dengan menggunakan thermometer infrared.
7. Percobaan selesai.
- Pengukuran suhu menggunakan metode pengukuran resistansi
1. Motor induksi tiga phasa dikopel dengan motor DC, kemudian rangkaian
pengukuran disusun seperti gambar 3.2 dan 3.3.
2. Seluruh switch dalam keadaan terbuka dan pengatur tegangan dalam posisi
minimum.
3. Kemudian push button T1 pada rangkaian kontrol di tekan.
4. Switch S1 ditutup, kemudian PTAC dinaikkan sampai tegangan seimbang
(untuk percobaan tegangan seimbang) dan tegangan tidak seimbang
(untuk percobaan tegangan tidak seimbang).
5. Switch S3 ditutup, kemudian PTDC dinaikkan hingga A2 menunjukkan
arus penguat nominal.
6. Switch S2 ditutup, kemudian tahanan RL dinaikkan dan dijaga konstan.
7. Selama 30 menit untuk setiap kenaikan waktu 5 menit, tekan push button
T2 pada rangkaian kontrol.
8. Naikkan tegangan PTDC 2 sampai arus yang tercatat pada A2 nominal,
kemudian catat tegangan pada V5.
9. Percobaan selesai.
Data yang di ambil pada percobaan adalah sebagai berikut:
- Temperatur yang tercatat pada thermometer infrared dalam kondisi
32
- Resistansi motor setiap kenaikan waktu tertentu baik dalam keadaan
seimbang maupun tidak seimbang.
3.5 Pelaksanaan Penelitian 3.5.1 Proses Pengumpulan Data
Adapun diagram alur dari proses pengambilan data terlihat pada gambar
3.4 berikut:
3.5.2 Melakukan Analisa Data
Data yang diperoleh dari hasil pengukuran lalu dianalisa untuk melihat
keadaan temperatur motor induksi tiga phasa dengan suplai tegangan seimbang
dan suplai tegangan tidak seimbang.
MULAI
MEMPERSIAPKAN PERALATAN PERCOBAAN
MERAINGKAI RANGKAIAN PERCOBAAN
MELAKUKAN PERCOBAAN
PENGAMBILAN DATA
APAKAH SESUAI PERCOBAAN DENGAN PERHITUNGAN
MENAMPAMPILKAN HASIL PENGUKURAN
DAN PERHITUNGAN
BERHENTI YA
33
BAB IV
HASIL PENELITIAN DAN PEMBAHASAN
4.1 Umum
Motor induksi merupakan motor arus bolak balik yang paling sering
digunakan dalam dunia industri maupun rumah tangga. Hal ini dikarenakan motor
induksi sangat mudah dalam pengoprasiannya.
Permasalahan tegangan tidak seimbang yang menyuplai motor induksi tiga
phasa merupakan salah satu masalah dalam pengoprasian motor induksi tiga
phasa. Tegangan tidak seimbang dapat disebabkan karena berbagai macam
gangguan asimetri pada sistem tenaga dan kegagalan studi peramalan beban
sehingga distribusi beban disetiap phasanya tidak sama.
Dalam bab ini akan dibahas pengaruh suplai tegangan tidak seimbang
terhadap temperature motor induksi tiga phasa. Adapun metode pengukuran
temperature motor induksi tiga phasa tersebut menggunakan thermometer infrared
dan menggunakan metode pengukuran resistansi.
4.2 Data Percobaan
Dari hasil penelitian di Laboratorium Konversi Energi Departemen Teknik
Elektro Fakultas Teknik USU diperoleh data pengujian sebagai berikut:
4.2.1 Motor Induksi Tiga Phasa dengan Suplai Tegangan Seimbang
Dari percobaan yang dilakukan di Laboratorium Konversi Energi Listrik
34
pengukuran suhu menggunakan thermometer infrared dan metode pengukuran
resistansi didapatkan data sebagai berikut :
Tabel 4.1 Data hasil pengukuran suhu dengan thermometer infrared Vab = 380 volt ; Vbc = 380 volt ; Vac = 380 volt
Tabel 4.2 Data hasil percobaan DC test pada motor induksi tiga phasa Vab = 380 volt ; Vbc = 380 volt ; Vac = 380 volt
4.2.2 Motor Induksi Tiga Phasa dengan Suplai Tegangan Tidak Ieimbang Dari percobaan yang dilakukan di Laboratorium Konversi Energi Listrik
FT USU untuk motor induksi 3 phasa dengan suplai tegangan tidak seimbang
seimbang dengan pengukuran suhu menggunakan thermometer infrared dan
35
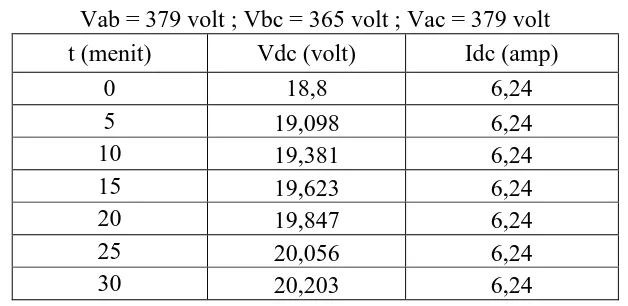
Tabel 4.3 Data hasil pengukuran suhu dengan suplai tegangan tidak seimbang 1% menggunakan thermometer infrared
Vab = 379 volt ; Vbc = 365 volt ; Vac = 379 volt
t (menit) suhu (0C)
0 29,8
5 32,7
10 35,5
15 37,9
20 40,1
25 42,2
30 43,9
Tabel 4.4 Data hasil pengukuran suhu dengan suplai tegangan tidak seimbang 3% menggunakan thermometer infrared
Vab = 377 volt ; Vbc = 347 volt ; Vac = 379 volt
t (menit) suhu (0C)
0 30,1
5 34,2
10 37,8
15 41,5
20 44,9
25 48,2
36
Tabel 4.5 Data hasil pengukuran DC test dengan suplai tegangan tidak seimbang 1%
Tabel 4.6 Data hasil pengukuran DC test dengan suplai tegangan tidak seimbang 3%
Dari data hasil penelitian di Laboratorium Konversi Energi Departemen
Teknik Elektro Fakultas Teknik USU dapat dilakukan analisa data sebagai berikut
37
4.3.1 Motor Induksi Tiga Phasa Dengan Suplai Tegangan Seimbang
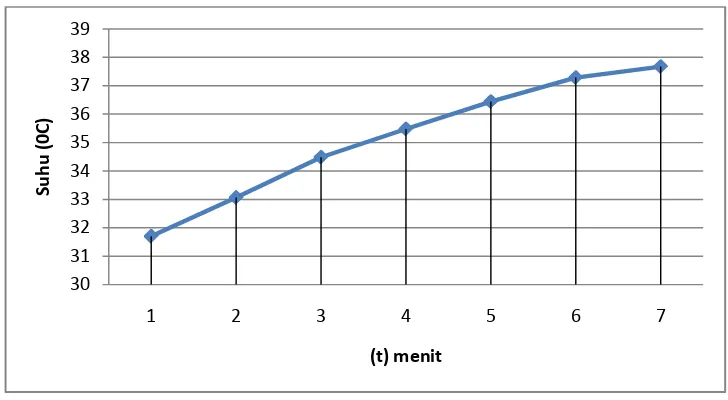
Dari table 4.1 dapat diketahui bahwa kenaikan rata-rata temperature motor
induksi tiga phasa suplai tegangan seimbang dengan pengukuran menggunakan
thermometer infrared sebagai berikut :
=�30− �0 �30− �0
=35,4−31,7 30−0
=3,7 30
= 0.1233 0C/m
Dari perhitungan diatas dapat ditentukan bahwa kenaikan temperature
motor induksi tiga phasa suplai tegangan seimbang pengukuran suhu
menggunakan thermometer infrared yaitu setiap kenaikan waktu satu menit terjadi
kenaikan suhu sebesar 0.1233 0C/m.
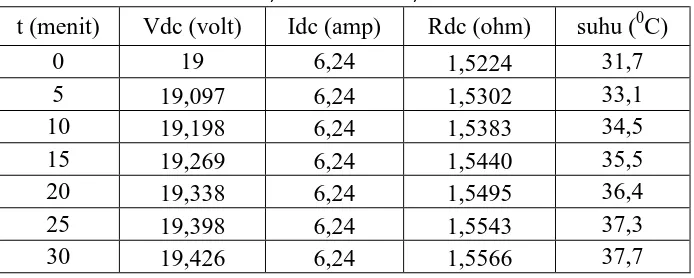
Sedangkan dari table 4.2 dapat ditentukan besar resistansi tahanan stator
motor induksi tiga phasa dengan suplai tegangan seimbang sebagai berikut :
��� =2���� ��
�0 = 19
2(6.24)= 1.5224 �ℎ�
�5 = 19.097
38
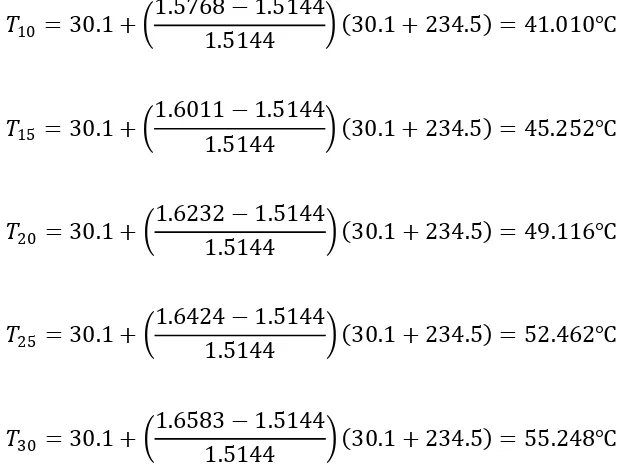
Dari hasil perhitungan resistansi diatas dapat ditentukan temperature motor
induksi tiga phasa dengan suplai tegangan seimbang sebagai berikut :
39
�30 = 31.701 +�
1.5566−1.5224
1.5224 �(31.701 + 234.5) = 37.7℃
Dari perhitungan diatas dapat dibuat table sebagai berikut :
Table 4.7 Data hasil perhitungan suhu motor induksi tiga phasa tegangan seimbang menggunakan metode pengukuran resistansi
Vab = 380 volt ; Vbc = 380 volt ; Vac = 380 volt
Dari table 4.3.1 dapat diketahui bahwa kenaikan rata-rata temperature
motor induksi tiga phasa suplai tegangan seimbang dengan pengukuran
menggunakan metode pengukuran resistansi sebagai berikut :
=�30− �0
Dari perhitungan diatas dapat ditentukan bahwa kenaikan temperature
40
menggunakan metode pengukuran resistansi yaitu setiap kenaikan waktu satu
menit terjadi kenaikan suhu sebesar 0.19967 0C/m.
Adapun grafik dari analisa data diatas dapat dibuat sebagai berikut :
Gambar 4.1 Grafik suhu vs menit untuk motor induksi tiga phasa suplai tegangan seimbang pengukuran suhu menggunakan thermometer infrared
Gambar 4.2 Grafik Suhu vs menit untuk motor induksi tiga phasa suplai tegangan seimbang pengukuran suhu menggunakan metode
41
4.3.2 Motor induksi tiga phasa dengan suplai tegangan tidak seimbang
Persentasi ketidakseimbangan berdasarkan defenisi NEMA standart MGI.
1993 dan IEEE yaitu :
% �����������������= ���− ���
��� � 100%
=379−374.33
374.33 � 100%
= 1.2475%
% �����������������= ���− ���
��� � 100%
=379−367.66
367.66 � 100%
= 3.084%
Dari table 4.3 dan 4.4 dapat diketahui bahwa kenaikan rata-rata
temperature motor induksi tiga phasa suplai tegangan tidak seimbang 1% dan 3%
dengan pengukuran menggunakan thermometer infrared sebagai berikut :
i. unbalanced voltage 1%
=�30 − �0 �30 − �0
=43.9−29.8 30−0
=14.1 30
42 ii. unbalanced voltage 3%
=�30 − �0 �30 − �0
=51.2−30.1 30−0
=21.1 30
= 0.703 0C/m
Dari perhitungan diatas dapat ditentukan bahwa kenaikan temperature
motor induksi tiga phasa suplai tegangan tidak seimbang 1% dan 3% pengukuran
suhu menggunakan thermometer infrared yaitu setiap kenaikan waktu satu menit
terjadi kenaikan suhu sebesar 0.47 dan 0.703 0C/m.
Sedangkan dari table 4.5 dapat ditentukan besar resistansi tahanan stator
motor induksi tiga phasa dengan suplai tegangan tidak seimbang 1% sebagai
berikut :
��� =2���� ��
�0 = 18.8
2(6.24)= 1.5064 �ℎ�
�5 = 19.098
2(6.24)= 1.5303 �ℎ�
�10 = 19.381
43
Dari hasil perhitungan resistansi diatas dapat ditentukan temperature motor
induksi tiga phasa dengan suplai tegangan seimbang sebagai berikut :
44
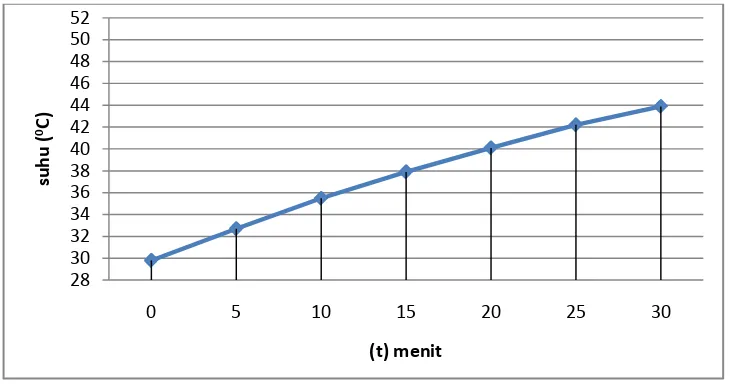
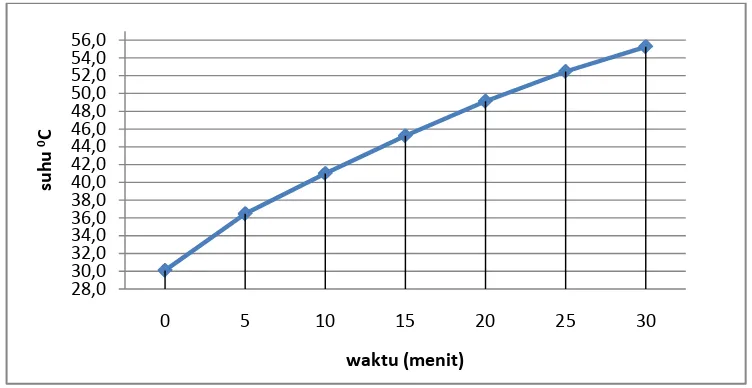
Dari table 4.6 dapat ditentukan besar resistansi tahanan stator motor
induksi tiga phasa dengan suplai tegangan tidak seimbang 3% sebagai berikut :
��� =2����
Dari hasil perhitungan resistansi diatas dapat ditentukan temperature motor
induksi tiga phasa dengan suplai tegangan seimbang sebagai berikut :
�� = �� +����− ��
� �(��+�)
�5 = 30.1 +�
1.5508−1.5144
45
Dari perhitungan diatas dapat dibuat table sebagai berikut :
Table 4.8 Data hasil perhitungan suhu motor induksi tiga phasa tegangan tidak seimbang 1% menggunakan metode pengukuran resistansi
Vab = 379 volt ; Vbc = 365 volt ; Vac = 379 volt
Table 4.9 Data hasil perhitungan suhu motor induksi tiga phasa tegangan tidak seimbang 3% menggunakan metode pengukuran resistansi
Vab = 377 volt ; Vbc = 347 volt ; Vac = 379 volt
t (menit) Vdc (volt) Idc (amp) Rdc (ohm) suhu (0C)
0 18,9 6,24 1,5144 30,100
46
Dari table 4.5.1 dan 4.6.1 dapat diketahui bahwa kenaikan rata-rata
temperature motor induksi tiga phasa suplai tegangan tidak seimbang 1% dan 3%
dengan pengukuran menggunakan sebagai berikut :
iii. unbalanced voltage 1%
=�30 − �0
iv. unbalanced voltage 3%
47
Dari perhitungan diatas dapat ditentukan bahwa kenaikan temperature
motor induksi tiga phasa suplai tegangan tidak seimbang 1% dan 3% pengukuran
suhu menggunakan metode pengukuran resistansi yaitu setiap kenaikan waktu
satu menit terjadi kenaikan suhu sebesar 0.657 dan 0.837 0C/m.
Adapun grafik dari analisa data diatas dapat dibuat sebagai berikut :
Gambar 4.3 Grafik Suhu vs menit untuk motor induksi tiga phasa suplai tegangan tidak seimbang 1% pengukuran suhu menggunakan
48
Gambar 4.4 Grafik Suhu vs menit untuk motor induksi tiga phasa suplai tegangan tidak seimbang 3% pengukuran suhu menggunakan
thermometer infrared
Gambar 4.5 Grafik Suhu vs menit untuk motor induksi tiga phasa suplai tegangan tidak seimbang 1% pengukuran suhu menggunakan
metode pengukuran resistansi
Gambar 4.6 Grafik Suhu vs menit untuk motor induksi suplai tegangan tidak seimbang 3% pengukuran suhu menggunakan metode pengukuran
49
4.3.3 Perbandingan Hasil Pengukuran Temperatur Motor Induksi Tiga Phasa Suplai Tegangan Seimbang dengan Suplai Tegangan Tidak Seimbang
Dari table data 4.1, 4.3 , dan 4.4 dapat diketahui perbandingan suhu motor
induksi tiga phasa suplai tegangan seimbang dengan suplai tegangan tidak
seimbang 1% dan 3% pengukuran suhu menggunakan thermometer infrared yaitu
sebagai berikut :
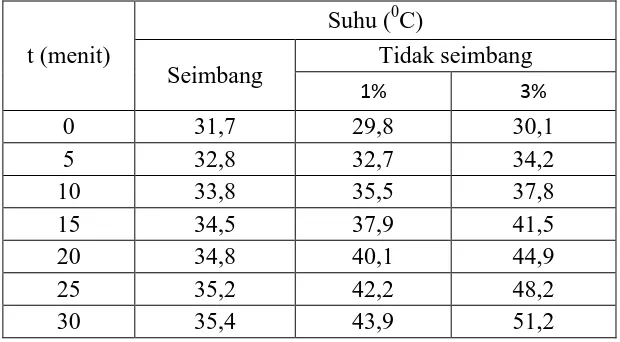
Table 4.10 Perbandingan kenaikan suhu suplai tegangan seimbang dan tidak seimbang 1% dan 3% menggunakan thermometer infared
t (menit)
Suhu (0C)
Seimbang Tidak seimbang
1% 3%
0 31,7 29,8 30,1
5 32,8 32,7 34,2
10 33,8 35,5 37,8
15 34,5 37,9 41,5
20 34,8 40,1 44,9
25 35,2 42,2 48,2
30 35,4 43,9 51,2
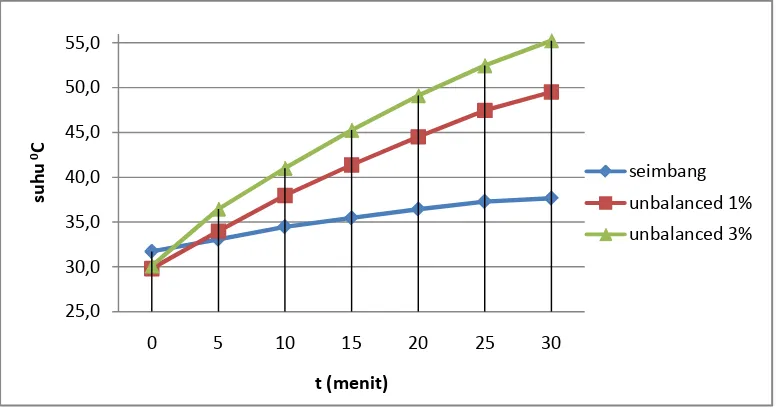
Dari table 4.10 diatas dapat dilihat bahwa terjadi kenaikan suhu motor
ketika disuplai dengan tegangan tidak seimbang baik tidak seimbang 1% maupun
50
Gambar 4.7 Grafik Suhu vs menit untuk motor induksi tiga phasa suplai tegangan seimbang dan suplai tegangan tidak seimbang 1% dan 3%
pengukuran suhu menggunakan thermometer infrared
Sedangkan dari table 4.7, 4.8, dan 4.9 dapat diketahui perbandingan suhu
motor induksi tiga phasa suplai tegangan seimbang dengan suplai tegangan tidak
seimbang 1% dan 3% pengukuran suhu menggunakan metode pengukuran
resistansi yaitu sebagai berikut :
Table 4.11 Perbandingan kenaikan suhu suplai tegangan seimbang dan tidak seimbang 1% dan 3% menggunakan metode pengukuran resistansi
t (menit)
Suhu (0C)
Seimbang Tidak seimbang
51
Dari table 4.8 diatas dapat dilihat bahwa terjadi kenaikan suhu motor
ketika disuplai dengan tegangan tidak seimbang baik tidak seimbang 1% maupun
3%. Untuk lebih jelas dapat dibuat grafik sebagai berikut:
Gambar 4.7 Grafik Suhu vs menit untuk motor induksi tiga phasa suplai tegangan seimbang dan suplai tegangan tidak seimbang 1% dan 3%
pengukuran suhu menggunakan metode pengukuran resistansi
4.3.4 Perbandingan Hasil Pengukuran Temperatur Motor Induksi Tiga Phasa Menggunakan Thermometer Infrared dan Hasil Perhitungan Temperatur Menggunakan Metode Pengukuran Resistansi
Dari tabel 4.10 dan 4.11 dapat diketahui perbandingan hasil pengukuran
suhu mengunakan thermometer infrared dan perhitungan suhu menggunakan
52
Tabel 4.12 Perbandingan Hasil Pengukuran Thermometer Infrared dan Hasil Perhitungan dengan Metode Pengukuran Resistansi
t (menit)
Thermometer infrared (0C) Pengukuran Resistansi (0C)
Seimbang Tidak seimbang Seimbang Tidak seimbang
1% 3% 1% 3%
Dari tabel 4.12 dapat dibuat grafik perbandingan antara hasil pengukuran
temperature menggunakan thermometer infrared dan perhitungan menggunakan
metode pengukuran resistansi untuk suplai tegangan tidak seimbang, tidak
seimbang 1% dan 3% yaitu sebagai berikut :
Gambar 4.8 Grafik perbandingan hasil pengukuran temperatur menggunakan thermometer infrared dan perhitungan menggunakan metode
53
Gambar 4.9 Grafik perbandingan hasil pengukuran temperatur menggunakan thermometer infrared dan perhitungan menggunakan metode
pengukuran resistansi untuk suplai tegangan tidak seimbang 1%
Gambar 4.10 Grafik perbandingan hasil pengukuran temperatur menggunakan thermometer infrared dan perhitungan menggunakan metode
54
4.3.5 Waktu yang Diperbolehkan Untuk Terjadi Ketidakseimbangan Tegangan Pada Motor Induksi Tiga Phasa
Dari tabel 4.3 dan tabel 4.4 data hasil pengukuran suhu dengan suplai
tegangan tidak seimbang 1% dan 3% menggunakan thermometer infrared dapat
dihitung waktu yang diperbolehkan untuk terjadi ketidakseimbangan tegangan
yang disuplai ke motor induksi tiga phasa sesuai standar (tabel 2.2) yaitu :
55
Sedangkan dari tabel 4.8 dan 4.9 data hasil perhitungan suhu dengan
suplai tegangan tidak seimbang 1% dan 3% menggunakan metode pengukuran
resistansi dapat dihitung waktu yang diperbolehkan untuk terjadi
ketidakseimbangan tegangan yang disuplai ke motor induksi tiga phasa sesuai
standar (tabel 2.2) yaitu :
vii. unbalanced 1%
Sedangkan untuk suplai tegangan seimbang waktu yang dibutuhkan
56
Tabel 4.13 Waktu yang dibutuhkan sampai temperature motor induksi dalam keadaan jenuh
Dari tabel 4.13 dapat dilihat bahwa waktu yang dibutuhkan sampai
temperatur motor induksi tiga phasa dalam keadaan jenuh yaitu ketika motor
induksi tersebut beroperasi selama 70 menit.
Untuk suplai motor dalam keadaan tidak seimbang 1% dan 3% tidak
dilakukan percobaan sampai temperatur jenuh atau sampai temperatur maksimum
dari motor induksi tersebut dikarenakan ketika motor dioperasikan dalam keadaan
suplai tidak seimbang selama 30 menit motor sudah sangat bergetar. Hal ini
disebabkan karena ketika motor di suplai dengan tegangan tidak seimbang terjadi
kenaikan temperatur yang sangat tinggi sehingga terjadi pemuaian pada bearing
57
suhu motor induksi semakin meningkat. Selain hal tersebut, bahwa motor induksi
tiga phasa yang terdapat pada laboratorium konversi energi listrik Fakultas Teknik
Universitas Sumatera Utara sudah dioperasikan sejak tahun 1976 sehingga
keandalan dari motor induksi tersebut sudah jauh berkurang dari kemampuan
yang tertera di nameplate motor induksi tersebut. Oleh sebab itu perlu dilakukan
pemeliharaan ataupun penggantian alat-alat yang lebih modern yang dilengkapi
dengan alat proteksi sehingga menghambat terjadinya kerusakan yang lebih cepat
58
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil penelitian dan pembahasan yang dilakukan, diperoleh
kesimpulan sebagai berikut :
1. Motor induksi tiga phasa dalam keadaan suplai tegangan tidak seimbang
terjadi kenaikan temperatur yang lebih tinggi dibandingkan pada saat
motor induksi tiga phasa disuplai tegangan seimbang yaitu 0.1233
0
C/menit untuk tegangan seimbang, 0.47 0C/menit untuk unbalanced 1%
dan 0.703 0C/menit untuk unbalanced 3% pengukuran menggunakan
thermometer infrared. Sedangkan pengukuran menggunakan pengukuran
resistansi yaitu 0.19967 0C/menit untuk tegangan seimbang, 0.567
0
C/menit untuk unbalanced 1% dan 0.837 0C/menit untuk unbalanced
3%.
2. Pengukuran suhu menggunakan thermometer infrared dan dengan
menggunakan metode pengukuran resistansi terdapat perbedaan hasil
pengukuran temperatur hal ini desebabkan posisi pengukuran
menggunakan thermometer infrared tidak tepat pada kumparan stator
motor induksi tiga phasa karena terhalang oleh badan motor. Hal ini
sejalan dengan apa yang tertuang didalam SNI IEC 60335-2009 klausul
11 tabel 3 dimana nilai pengukuran kenaikan suhu belitan motor
59
dibandingkan dengan pengukuran menggunakan metode termokopel atau
termhometer infrared.
5.2 Saran
Adapun saran dari penulis sebagai pengembangan dari tugas akhir ini
adalah sebagai berikut :
1. Menggunakan metode pengukuran temperatur yang lain seperti
menggunakan metode FEM.
2. Melakukan penelitian untuk membandingkan ketidakseimbangan
5 BAB II
TINJAUAN PUSTAKA
2.1 Motor Induksi
Motor induksi merupakan motor arus bolak-balik (AC) yang paling luas
digunakan dan dapat dijumpai dalam setiap aplikasi industri maupun rumah
tangga. Penamaannya berasal dari kenyataan bahwa arus rotor motor ini bukan
diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai
akibat adanya perbedaan relatif antara putaran rotor dengan medan putar (rotating
magnetic field) yang dihasilkan arus stator [1].
Motor ini memiliki konstruksi yang kuat, sederhana, handal, serta berbiaya
murah. Di samping itu motor ini juga memiliki effisiensi yang tinggi saat
berbeban penuh dan tidak membutuhkan perawatan yang banyak. Akan tetapi jika
dibandingkan dengan motor DC, motor induksi masih memiliki kelemahan dalam
hal pengaturan kecepatan. Dimana pada motor induksi pengaturan kecepatan
sangat sukar untuk dilakukan, sementara pada motor DC hal yang sama tidak
dijumpai.
2.2 Kostruksi Motor Induksi
Motor induksi pada dasarnya memiliki konstruksi stator yang sama
dengan motor sinkron, dan hanya terdapat perbedaan pada konstuksi rotor. Stator
dibentuk dari laminasi – laminasi tipis yang terbuat dari aluminium ataupun besi
tuang, dan kemudian dipasak bersama – sama untuk membentuk inti stator
6
konduktor – konduktor yang terisolasi ini kemudian disisipkan ke dalam slot –
slot tersebut.
(a) (b)
Gambar 2.1 (a) Penampang inti stator, (b) Stator motor induksi
Rotor motor induksi tiga phasa dapat dibedakan menjadi dua jenis yaitu rotor
sangkar (squirrel cage rotor) dan rotor belitan (wound rotor). Rotor sangkar
terdiri dari susunan batang konduktor yang dibentangkan ke dalam slot – slot
yang terdapat pada permukaan rotor dan tiap – tiap ujungnya dihubung singkat
dengan menggunakan shorting rings.
Sementara itu pada rotor belitan, rotornya dibentuk dari satu set belitan
tiga phasa yang merupakan bayangan dari belitan statornya. Biasanya belitan tiga
phasa dari rotor ini terhubung Y dan kemudian tiap - tiap ujung dari tiga kawat
rotor tersebut diikatkan pada slip ring yang berada pada poros rotor. Pada
motor induksi rotor belitan, rangkaian rotornya dirancang untuk dapat
disisipkan dengan tahanan eksternal, yang mana hal ini akan memberikan
keuntungan dalam memodifikasi karakteristik torsi – kecepatan dari motor.
2.3 Medan Putar
Perputaran motor pada arus bolak-balik ditimbulkan oleh adanya medan
7
putar ini terjadi apabila kumparan stator dihubungkan dalam fasa banyak,
umumnya phasa tiga [1].
�� =�� sin�� (2.3.1�)
�� = ��sin (�� − 1200) (2.3.1�)
�� =��sin(�� −2400) (2.3.1�)
Gambar 2.2 Gambar 2.3
Arus Tiga Phasa Seimbang Diagram phasor fluksi tiga phasa seimbang
i ii
iii iv
8 2.4 Prinsip Kerja Motor Induksi
Ketika medan magnetik memotong konduktor rotor, di dalam konduktor
tersebut akan diinduksikan ggl yang sama seperti ggl yang diinduksikan dalam
lilitan sekunder transformator oleh fluksi primer. Rangkaian rotor merupakan
rangkaian tertutup, baik melalui cincin ujung maupun tahanan luar. Ggl induksi
menyebabkan arus mengalir di dalam konduktor rotor. Sehingga dengan adanya
aliran arus pada konduktor rotor di dalam medan magnet yang dihasilkan stator,
maka akan dibangkitkan gaya ( F ) yang bekerja pada motor.
Untuk memperjelas prinsip kerja motor induksi tiga phasa, maka dapat
dijabarkan dalam beberapa langkah berikut:
1. Pada keadaan beban nol ketiga phasa stator yang terhubung dengan
sumber tegangan tiga phasa yang setimbang akan menghasilkan arus pada
tiap belitan phasa arus pada tiap phasa menghasilkan fluksi bolak – balik
yang berubah -ubah.
2. amplitudo fluksi yang dihasilkan berubah secara sinusoidal dan arahnya
tegak lurus terhadap belitan phasa
3. akibat fluksi yang berputar timbul ggl pada stator motor yang besarnya :
�1 =−�
��
�� (����) (2.2) �1 = 4.44��1� (����) (2.3)
4. Resultan dari ketiga fluksi bolak – balik tersebut menghasilkan medan
putar yang bergerak dengan kecepatan sinkron ns yang besarnya
ditentukan oleh jumlah kutub p dan frekuensi stator f yang dirumuskan :
�� =
120�
9
5. fluksi yang berputar tersebut akan memotong batang konduktor pada
rotor. Akibatnya pada kumparan rotor timbul tegangan induksi sebesar E2
yang besarnya
�2 = 4.44��2��(����) (2.5)
Dimana:
E2 = tegangan induksi pada rotor saat rotor dalam keadaan diam (volt)
N2 = jumlah lilitan rotor
Φm = fluksi maksimum (Wb)
6. karena kumparan rotor merupakan rangkaian tertutup, maka ggl tersebut
akan menghasilkan arus I2
7. adanya arus I2 di dalam medan magnet akan menimbulkan gaya F pada
rotor
8. Bila kopel mula yang dihasilkan oleh gaya F cukup besar untuk memikul
kopel beban, rotor akan berputar searah dengan medan putar stator.
9. perputaran rotor akan semakin meningkat hingga mendekati kecepatan
sinkron. Perbedaan kecepatan medan putar stator (ns) dengan kecepatan
rotor (nr) disebut slip (s) dan dinyatakan dengan :
�= ��− ��
�� � 100% (2.6)
10.pada saat rotor dalam keadaan berputar, besarnya tegangan yang
terinduksi pada kumparan rotor akan bervariasi tergantung besarnya slip.
Tegangan induksi ini dinyatakan dengan E2s yang besarnya :
10 dimana :
E2s = tegangan induksi rotor dalam keadaan berputar (volt)
f2 = sf = frekuensi rotor ( frekuensi tegangan induksi pada rotor dalam
keadaan berputar )
11.bila ns = nr, tegangan tidak akan terinduksi dan arus tidak akan mengalir
pada kumparan rotor, sehingga tidak akan dihasilkan kopel. Kopel akan
dihasilkan jika nr< ns.
2.5 Rangkaian Ekivalen Motor induksi
Operasi dari motor induksi tergantung pada induksi arus dan tegangan di
dalam rangkaian rotor yang berasal dari rangkaian stator karena adanya aksi
transformator. Karena induksi arus dan tegangan pada motor induksi pada
dasarnya sama dengan operasi transformator, maka rangkaian ekivalen motor
induksi akan sangat menyerupai rangkaian ekivalen dari transformator. Motor
induksi disebut juga sebagai singly excited machine, sebab daya hanya disuplai
dari rangkaian stator.
Karena motor induksi tidak memiliki rangkaian medan, maka pada
modelnya tidak akan terdapat sumber tegangan internal EA sebagaimana
dijumpai pada mesin sinkron.
Rangkaian ekivalen per phasa dari transformator dapat menggantikan
operasi dari motor induksi. Sebagaimana halnya pada transformator, maka akan
terdapat tahanan (R1) dan induktansi sendiri (X1) pada belitan stator yang
11
Gambar 2.5 Rangkaian ekivalen motor induksi sebagai model transformator
Tegangan stator E1 dikopel terhadap sisi sekunder ER sebagaimana halnya
transformator ideal dengan rasio belitan effektif aeff. Rasio belitan ini dengan
mudah dapat ditentukan pada motor induksi rotor belitan, yang mana pada
dasarnya rasio ini merupakan banyaknya konduktor per phasa pada stator terhadap
jumlah konduktor per phasa pada rotor. Akan tetapi tidak demikian halnya pada
motor induksi sangkar tupai, karena tidak terdapatnya belitan pada rotor motor
tersebut.
Tegangan ER pada rotor akan menghasilkan arus, karena rangkaian
rotornya terhubung singkat. Impedansi rangkaian primer dan arus magnitisasi dari
motor induksi sama halnya dengan komponen - komponen yang dijumpai pada
transformator. Hal yang membedakan rangkaian ekivalen tersebut pada motor
induksi dikarenakan terdapatnya variasi frekuensi pada tegangan rotor (ER),
impedansi rotor RR dan jXR.
Ketika tegangan diberikan pada belitan stator, maka tegangan
akan diinduksikan pada belitan rotornya. Pada umumnya, gerak relatif yang lebih
besar di antara rotor dan medan putar stator, akan menghasilkan tegangan dan
frekuensi rotor yang lebih besar juga. Gerak relatif yang terbesar terjadi saat rotor
dalam keadaaan diam atau disebut juga dalam keadaan blocked rotor. Sebaliknya,
12
sama dengan kecepatan sinkron, sehingga tidak terdapat pergerakan relatif.
Magnitud dan frekuensi tegangan induksi rotor pada saat berputar sebanding
dengan slip dari rotornya. Sehingga, besarnya tegangan induksi rotor dalam
kondisi rotor terkunci disebut ERO, sedangkan untuk slip pada suatu putaran
tertentu dirumuskan dengan :
��� = ���� (2.8)
Dan frekuensi induksi pada slip tertentu :
�� = ��� (2.9)
Tahanan dari rotor RR bernilai konstan/ tidak tergantung pada slip,
sementara itu pada reaktansi rotor besarnya akan dipengaruhi oleh slip.
Reaktansi dari rotor tergangtung pada induktansi rotor, frekuensi tegangan
rotor dan arus pada rotor. Bila induktansi rotor LR, maka reaktansi rotor adalah :
XR= ωr LR= 2 π fr LR : fr = sfe
Sehingga
XR = 2 π sfe LR
= s(2 π sfe LR)
=���� (2.10)
LR = induktansi rotor
XRO = reaktansi blok rotor.
13
Dari gambar 2.5.2 arus pada rotor dapat ditentukan sebagai :
�� = � ��
�+��� (2.11)
�� =� ��
� +���� (2.12)
�� =� ��
�
� +����
(2.13)
Dimana :
IR = arus rotor ( A )
ER = tegangan induksi pada rotor ( V )
RR= tahanan rotor ( Ώ )
XR= reaktansi rotor ( Ώ )
Dalam teori transformator, analisa rangkaian ekivalen sering
disederhanakan dengan mengabaikan seluruh cabang magnetisasi atau dengan
memindahkan langsung ke terminal primer. Pendekatan demikian tidak
dibenarkan dalam motor induksi yang bekerja dalam keadaan normal, karena
adanya celah udara yang menjadikan perlunya suatu arus magnetisasi yang sangat
besar (30% sampai 40% dari arus beban penuh). Untuk itu dalam rangkaian
ekivalen RC dapat diabaikan. Rangkaian ekivalennya adalah seperti pada gambar
2.5.3 :
14 2.6 Penentuan Parameter Motor induksi
Data yang diperlukan untuk menghitung performansi dari suatu motor
induksi dapat diperoleh dari hasil pengujian tanpa beban, pengujian rotor tertahan,
dan pengukuran tahanan dc lilitan stator.
2.6.1 Pengujian Tanpa Beban (No Load Test)
Pengujian tanpa beban pada motor induksi akan memberikan
keterangan berupa besarnya arus magnetisasi dan rugi – rugi tanpa beban.
Biasanya pengujian tersebut dilakukan pada frekuensi yang diizinkan dan
dengan tegangan tiga phasa dalam keadaan setimbang yang diberikan pada
terminal stator. Pembacaan diambil pada tegangan yang diizinkan setelah
motor bekerja cukup lama, agar bagian – bagian yang bergerak mengalami
pelumasan sebagaimanamestinya. Rugi – rugi rotasional keseluruhan pada
frekuensi dan tegangan yang diizinkan pada waktu dibebani biasanya
dianggap konstan dan sama dengan rugi – rugi tanpa beban.
Pada keadaan tanpa beban, besarnya arus rotor sangat kecil dan hanya
diperlukan untuk menghasilkan torsi yang cukup untuk mengatasi gesekan.
Karenanya rugi – rugi I2R tanpa beban cukup kecil dan dapat
diabaikan. Pada transformator rugi – rugi I2R primernya tanpa beban dapat
diabaikan, akan tetapi rugi – rugi stator tanpa beban motor induksi besarnya
cukup berarti karena arus magnetisasinya lebih besar. Besarnya rugi – rugi
rotasional PR pada keadaan kerja normal adalah :
���� = ��� −3�2���1 (2.14)
Dimana :
15 Inl = arus tanpa beban tiap phasa ( A )
R1 = tahanan stator tiap phasa ( ohm )
Karena slip pada keadaaan tanpa beban sangat kecil, maka akan
mengakibatkan tahanan rotor R2/s sangat besar. Sehingga cabang paralel rotor
dan cabang magnetisasi menjadi jXM di shunt dengan suatu tahanan yang
sangat besar, dan besarnya reaktansi cabang paralel karenanya sangat
mendekati XM. Sehingga besar reaktansi yang tampak Xnl yang diukur pada
terminal stator pada keadaan tanpa beban sangat mendekati X1 + XM, yang
merupakan reaktansi sendiri dari stator, sehingga :
Xnl = X1+ XM (2.15)
Maka besarnya reaktansi diri stator, dapat ditentukan dari pambacaan
alat ukur pada keadaan tanpa beban. Untuk mesin tiga phasa yang terhubung
Y besarnya impedansi tanpa beban Znl/ phasa :
Znl =
Vnl
�3Inl
(2.16)
Di mana Vnl merupakan tegangan line, pada pengujian tanpa beban.
Besarnya tahanan pada pengujian tanpa beban Rnl adalah :
Rnl = Pnl
3I nl2 (2.17)
Pnl merupakan suplai daya tiga phasa pada keadaan tanpa beban, maka
besar reaktansi tanpa beban
Xnl =�Z nl2 −R2 nl (2.18)
sewaktu pengujian beban nol, maka rangkaian ekivalen motor induksi
16
Gambar 2.8 Rangkaian ekivalen motor induksi pada percobaan beban nol
2.6.2 Pengujian Tahanan Stator ( DC Test )
Untuk menentukan besarnya tahanan stator R1 dilakukan dengan test
DC. Pada dasarnya tegangan DC diberikan pada belitan stator motor induksi.
Karena arus yang disuplai adalah arus DC, maka tidak terdapat tegangan yang
diinduksikan pada rangkaian rotor sehingga tidak ada arus yang mengalir
pada rotor. Dalam keadaan demikian, reaktansi dari motor juga bernilai nol,
oleh karena itu, yang membatasi arus pada motor hanya tahanan stator.
Untuk melakukan pengujian ini, arus pada belitan stator diatur pada
nilai rated, yang mana hal ini bertujuan untuk memanaskan belitan stator pada
temperatur yang sama selama operasi normal. Apabila tahanan stator
dihubung Y, maka besar tahanan stator/ phasa adalah :
�1 =
���
2��� (2.19)
Bila stator dihubung delta, maka besar tahanan stator.
�1 =
3���
2��� (2.20)
Dengan diketahuinya nilai dari R1, rugi – rugi tembaga stator pada
beban nol dapat ditentukan, dan rugi – rugi rotasional dapat ditentukan
sebagai selisih dari daya input pada beban nol dan rugi – rugi tembaga stator.
17 motor induksi yang terhubung Y.
Gambar 2.9 Rangkaian pengukuran untuk DC test
2.6.3 Pengujian Rotor Tertahan ( Block Rotor Test )
Pengujian ini bertujuan untuk menentukan parameter – parameter
motor induksi, dan biasa juga disebut dengan locked rotor test. Pada
pengujian ini rotor dikunci/ ditahan sehingga tidak berputar.
Untuk melakukan pengujian ini, tegangan AC disuplai ke stator dan
arus yang mengalir diatur mendekati beban penuh. Ketika arus telah
menunjukkan nilai beban penuhnya, maka tegangan, arus, dan daya yang
mengalir ke motor diukur.
Rangkaian ekivalen untuk pengujian ini ada pada gambar 2.21
Gambar 2.10 Rangkaian ekivalen motor induksi pada percobaan block rotor test
Saat pengujian ini berlangsung s = 1 dan tahanan rotor R2/s = R2.
Karena nilai R2 dan X2 begitu kecil, maka arus input akan seluruhnya
18
sirkit pada saat ini terlihat seperti kombinasi seri X1, R1, X2, dan R2. Sesudah
tegangan dan frekuensi diatur, arus yang mengalir pada motor diatur dengan
cepat, sehingga tidak timbul kenaikan temperatur pada rotor dengan cepat.
Daya input yang diberikan kepada motor adalah :
��� = √3���� (2.21)
Dimana :
VT = tegangan line pada saat pengujian berlansung
IL = arus line pada saat pengujian berlangsung
��� = ��
√3�� (2.22)
Dimana ZBR = impedansi hubung singkat
��� =���+����
=���cos�+����sin� (2.23)
Tahanan block rotor :
��� =�1+�2 (2.24)
Sedangkan reaktansi block rotor X’BR = X1’ + X2’
X1’ + X2’ adalah reaktansi stator dan rotor pada frekuensi
pengujian
�2 =���− �1 (2.25)
Nilai dari R1 ditentukan dari test DC. Karena reaktansi berbanding
langsung dengan frekuensi, maka reaktansi ekivalen total ( XBR ) pada saat
frekuensi operasi normal
��� =������� ���� ����
′ =�
1+�2 (2.25)
19
Tabel 2.1 Distribusi reaktansi X1dan X2 pada berbagai desain motor induksi
Desain Kelas X1 X2
A 0.5 XBR 0.5 XBR
B 0.4 XBR 0.6 XBR
C 0.3 XBR 0.7 XBR
D 0.5 XBR 0.5 XBR
Rotor Belitan 0.5XBR 0.5XBR
2.7 Tegangan Tidak Seimbang
Dalam sistem tiga phasa yang seimbang,tegangan line to netral memiliki
magnitude yang sama dan tiap – tiap sudut phasanya berbeda 120 derajat satu
sama lain. Apabila terdapat tegangan tiga phasa yang magnitudnya tidak sama dan
sudut fasanya mengalami pergeseran sehingga tidak berbeda 120 derajat satu
sama lain, maka dikatakan sistem tersebut memiliki tegangan tidak seimbang.
Penyebab tegangan tidak seimbang termasuk impedansi saluran transmisi
dan saluran distribusi yang tidak sama, distribusi beban – beban satu phasa yang
tidak merata dalam jumlah besar, dan lain – lain. Ketika beban tiga phasa
seimbang dihubungkan dengan sistem suplai yang tidak seimbang, maka arus
yang dialirkan ke beban juga tidak seimbang. Oleh karena itu sangat sulit / tidak
mungkin untuk menyediakan suatu sistem suplai seimbang yang sempurna kepada
20
ketidakseimbangan tegangan untuk mereduksi pengaruhnya pada beban – beban
konsumen.
I ii
Gambar 2.11 diagram vector tegangan seimbang; diagram vector tegangan tidak
seimbang
Metode yang biasa digunakan dalam menganalisa baik arus ataupun
tegangan dalam keadaaan tidak seimbang adalah dengan menggunakan komponen
– komponen simetris yaitu suatu metode yang secara matematis memecahkan
suatu sistem yang tidak seimbang menjadi tiga buah sistem yang seimbang.
Sistem tersebut adalah urutan positif, urutan negatif dan urutan nol. Untuk sistem
yang seimbang sempurna, maka sistem urutan negatife dan urutan nol tidak ada.
i ii iii
Gambar 2.12 Diagram vector urutan positif (i) ; diagram vector urutan negatif (ii);
21
Sistem urutan ini dapat dilukiskan secara fisika. Arah perputaran dari
motor induksi tiga phasa ketika diaplikasikan dengan tegangan urutan negatif
akan berlawanan arah dengan arah perputaran motor induksi sewaktu
diaplikasikan dengan tegangan urutan positif. Sementara itu sistem urutan nol
tidak akan menimbulkan perputaran pada motor induksi, karena tidak ada
pebedaan phasa pada ketiga tegangannnya, sehinggan tidak akan dibangkitkan
medan putar.
Oleh karena itu, ada dua defenisi ketidakseimbangan pada komponen –
komponen simetris, yaitu :Faktor ketidakseimbangan urutan negatif = �2
�1 dan
Faktor ketidakseimbangan urutan nol = �0
�1
dimana ( V1, V2, V0 adalah sistem
urutan positif, urutan negative, dan urutan nol). Sistem arus urutan nol tidak dapat
mengalir pada sistem tiga phasa, misalnya motor induksi, oleh karena itu factor
ketidakseimbangan urutan nol itu sering diabaikan. Adapun ketidakseimbangan
tegangan urutan negatif menunjuk pada besarnya tegangan yang mencoba untuk
memutar arah motor induksi tiga phasa pada arah yang berlawanan terhadap yang
diberikan oleh tegangan urutan positif.
Adapun faktor ketidakseimbangan urutan negatif menurut IEC 60034 – 26
22
���2 =
��� +�2���� + �����
3 (2.28)
Dimana :� = −0.5 +�0.0866 ����2 = −0.5− �0.866
Sedangkan menurut NEMA standard MG1. 1993 [3] dan IEEE defenisi
ketidakseimbangan itu adalah :
����������������= ���− ���
��� � 100 % (2.29)
Dimana :
VLL = tegangan line-line yang tertinggi
Vll = tegangan rata-rata dari tegangan line
Sesuai dengan rumusan yang telah diberikan, dapat dilihat bahwa definisi
tegangan tidak seimbang yang diberikan NEMA menghindari penakaian aljabar
kompleks, sehingga kedua rumusan tersebut akan memberikan hasil yang berbeda.
Contoh jika tegangan tidak seimbang
��� = 450∠0�, ��� = 363∠−121.44�,��� = 405∠130�
Maka menurut persamaan 3.2 dan 3.3, maka besarnya Vab1 dan Vab2
adalah :
���1 = 404.625∠2.89� ������2 = 50.217∠−23.98�
Maka besarnya ketidakseimbangan menurut IEC adalah
% ����������������= 50.217
23 Sedangkan menurut NEMA adalah :
% ���������������� = 43.8
406.2� 100 = 10.78 %
Tegangan tidak setimbang dalam persentase yang kecil akan menghasilkan
arus tidak seimbang dalam jumlah besar, yang mana hal ini akan menimbulkan
kenaikan temperatur pada motor. Jika tegangan yang tidak setimbang menyuplai
motor induksi, maka daya kuda nominal dari motor harus dikalikan dengan suatu
faktor seperti yang ditunjukkan gambar 2.7.1
Gambar 2.13 Kurva penurunan rating motor induksi (NEMA)
Menurut kurva ini, motor induksi dirancang sedemikian rupa sehingga
mampu menangani ketidaksetimbangan tegangan 1%, dan selanjutnya akan
menurun terganntung pada tingkat ketidaksetimbangan. Operasi pada motor pada
harga ketidaksetimbangan tegangan di atas 5% tidak diizinkan.
24
National Electrical Manufacturing Association (NEMA) mendefinisikan
temperature rise adalah kenaikan temperatur diatas temperature ambient.
Temperature ambient yaitu temperatur udara disekeliling motor atau dapat
dikatakan sebagai suhu ruangan. Penjumlahan dari temperature rise dan
temperature ambient adalah panas keseluruhan panas pada motor. Kelas isolasi
temperature pada motor induksi dijelaskan oleh tabel berikut (temperature
ambient tidak lebih dari 400C) :
Tabel 2.2 Temperature rise for large motors with 1.0 sevice factor
No Motor Rating
Insulation Class and Temperatur Rise 0C
Faktor penyebab rusaknya isolasi winding adalah panas yang berlebih
pada motor. Panas berlebih yang berlangsung lama pada lilitan akan menyebabkan
stress pada lilitan dan isolasi kawat menjadi rapuh. Jika dibiarkan terlalu lama
akan menyebabkan isolasi pada lilitan akan retak. Jika gejala ini disertai dengan
munculnya partial discharge maka proses penuaan isolasi akan semakin cepat.
Berdasarkan penelitian NEMA usia dari isolasi winding akan berkurang
setengahnya setiap kenaikan 100C dari kondisi normal kerja motor. Akan tetapi
jika motor harus beroperasi 400C di atas temperature normal maka umur
isolasinya menjadi 1/16 dari umur normal yang diperkirakan. Oleh sebab itu
25
proteksi untuk mengatasi panas lebih pada motor seperti thermal overload relay.
Sehingga apabila terjadi overheating pada motor relai akan segera bekerja
sehinngga dapat meminimalkan kerusakan pada isolasi motor.
Berikut ini adalah metode dalam menentukan temperatur motor induksi [4] yaitu :
a. Menggunakan thermometer infrared
Metode ini adalah penentuan suhu dengan sensor suhu, atau dengan
thermometer infrared, dengan metode ini instrumen diterapkan pada bagian
terpanas dari mesin yang dapat diakses .
b. Mengunakan Embedded Detector
Motor yang menggunakan embedded detector pada lilitannya dapat
dimonitor langsung output yang dideteksi pada peralatan. Output temperature
yang ditunjukkan adalah temperature terpanas dimana lokasi sensor diletakkan.
Perbedaan antara embedded detector dengan thermometer infrared yaitu
embedded detector tertanam di lilitan stator motor sedangkan thermometer
infrared dapat diletakkan dimana saja bagian motor yang paling panas yang
mudah diakses.
c. Mengukur Tahanan Lilitan motor
Metode digunakan untuk motor yang tidak memiliki embedded detector
seperti thermocouple atau resistance temperature detectors (RTDs). Kelebihan
metode ini yaitu dapat dilakukan tanpa harus membongkar kerangka motor
Penentuan temperature dengan metode ini yaitu dengan membandingkan
tahanan lilitan motor pada temperature yang ingin ditentukan (pada saat motor
26
ambient). Temperature tahanan yang ingin ditentukan dapat dihitung dengan
persamaaan :
�� =�� + ����− ��
� �(�� + �) (2.30)
Dimana : Tt : Temperatur total lilitan (oC)
Tb : Temperatur pada saat motor dingin (oC)
Rt : Tahanan pada saat motor panas (ohm)
Rb : Tahanan pada saat motor dingin (ohm)
K : 234.5 ( konstanta untuk bahan tembaga ) (oC)
1 BAB I
PENDAHULUAN
1.1 Latar Belakang
Motor induksi merupakan motor arus bolak balik yang paling sering
digunakan dalam dunia industri maupun rumah tangga. Hal ini dikarenakan motor
induksi sangat mudah dalam pengoprasiannya. Selain itu konstruksi motor induksi
memiliki konstruksi yang kuat, serta memiliki effesiensi yang baik dan putaran
yang konstan untuk setiap perubahan beban.
Permasalahan tegangan tidak seimbang yang menyuplai motor induksi tiga
phasa merupakan salah satu masalah dalam pengoprasian motor induksi tiga
phasa. Tegangan tidak seimbang dapat disebabkan karena berbagai macam
gangguan asimetri pada sistem tenaga dan kegagalan studi peramalan beban
sehingga distribusi beban disetiap phasanya tidak sama.
Ketidakseimbangan tegangan yang menyuplai motor induksi tiga phasa
akan mengakibatkan pemanasan yang berlebih pada motor induksi tersebut. Hal
ini dikarenakan adanya arus yang berlebih pada salah satu phasa yang menyuplai
motor induksi tersebut sehingga terjadi pemanasan yang berlebih pada
kumparannya. Kenaikan temperatur motor induksi dapat diukur dengan
menggunakan alat thermometer infrared ataupun dengan metode mengukur
resistansi pada motor induksi.
Oleh karena itu perlu dilakukan suatu kajian baik berupa analisis maupun
penelitian di labratorium untuk melihat bagaimana ketidakseimbangan tegangan
mempengaruhi kenaikan temperatur pada motor induksi, serta membandingkan
2
thermometer infrared dan dengan metode mengukur resistansi motor induksi
tersebut.
1.2 Rumusan Masalah
Adapun rumusan masalah tugas akhir ini adalah :
1. Bagaimana kondisi panas motor induksi tiga phasa dalam kondisi
tegangan seimbang dengan mengukur menggunakan thermometer
infrared.
2. Bagaimana kondisi panas motor induksi tiga phasa dalam kondisi
tegangan seimbang dengan metode mengukur resistansi motor induksi
tersebut.
3. Bagaimana kondisi panas motor induksi tiga phasa dalam kondisi
tegangan tidak seimbang dengan mengukur menggunakan thermometer
infrared.
4. Bagaimana kondisi panas motor induksi tiga phasa dalam kondisi
tegangan tidak seimbang dengan metode mengukur resistansi motor
induksi tersebut.
5. Bagaimana perbandingan panas yang didapat dengan mengukur
menggunakan thermometer infrared dan panas yang didapat dengan
3 1.3 Tujuan Penelitian
Adapun tujuan dari penulisan tugas akhir ini adalah :
1. Untuk mengetahui panas motor induksi tiga phasa dalam kondisi
tegangan seimbang.
2. Untuk mengetahui panas motor induksi tiga phasa dalam kondisi
tegangan tidak seimbang.
3. Untuk membandingkan panas motor induksi tiga phasa dengan metode
pengukuran menggunakan thermometer infrared dan metode
pengukuran resistansi, baik dalam kondisi tegangan seimbang maupun
tegangan tidak seimbang.
1.4 Batasan masalah
Adapun pembatasan masalah yang dilakukan dalam penulisan tugas akhir ini
adalah :
1. Tidak menganalisa gangguan dan harmonisa tegangan yang tejadi pada
sistem tenaga.
2. Tidak membahas tegangan tidak seimbang yang disebabkan
ketidakseimbangan sudut phasa dan tidak melibatkan teori komponen –
komponen simetris dalam analisa tegangan tidak seimbang.
3. Tidak membahas pengaruh tegangan tidak seimbang terhadap torsi dan
effisiensi motor induksi.
4. Hanya membandingkan metode pengukuran menggunakan thermometer
4
5. Defenisi tegangan tidak seimbang yang digunakan dalam tulisan ini
adalah definisi yang digunakan NEMA standard MG1. 1993.
6. Analisa data berdasarkan peralatan yang tersedia di Laboratorium
Konversi Energi Listrik FT. USU
1.5 Manfaat Penulisan
Adapun manfaat yang didapat dalam peneitian ini adalah :
1. Untuk memprediksi panas motor induksi tiga phasa dalam keadaan
tegangan tidak seimbang sehingga dapat menentukan setting alat proteksi.
2. Dapat memberikan informasi dan pembaca mengenai pengaruh tegangan
i ABSTRAK
Motor induksi merupakan motor arus bolak balik yang paling sering
digunakan dalam dunia industri maupun rumah tangga. Permasalahan tegangan
tidak seimbang yang menyuplai motor induksi tiga phasa merupakan salah satu
masalah dalam pengoprasian motor induksi tiga phasa.
Oleh karena itu perlu dilakukan suatu kajian baik berupa analisis maupun
penelitian di labratorium untuk melihat bagaimana ketidakseimbangan tegangan
mempengaruhi kenaikan temperatur pada motor induksi, serta membandingkan
temperature motor induksi hasil pengukuran yang didapat dengan menggunakan
thermometer infrared dan dengan metode mengukur resistansi motor induksi
tersebut.
Motor induksi tiga phasa dalam keadaan suplai tegangan tidak seimbang
terjadi kenaikan temperatur yang lebih tinggi dibandingkan pada saat motor
induksi tiga phasa disuplai tegangan seimbang yaitu 0.1233 0C/menit untuk
tegangan seimbang, 0.47 0C/menit untuk unbalanced 1% dan 0.703 0C/menit
untuk unbalanced 3% pengukuran menggunakan thermometer infrared.
Sedangkan pengukuran menggunakan pengukuran resistansi yaitu 0.19967
0
C/menit untuk tegangan seimbang, 0.567 0C/menit untuk unbalanced 1% dan
TUGAS AKHIR
ANALISIS PENGARUH TEGANGAN TIDAK SEIMBANG TERHADAP TEMPERATUR MOTOR INDUKSI TIGA PHASA
( Aplikasi Pada Laboratorium Konversi Energi Listrik FT USU) Diajukan untuk memenuhi persyaratan
menyelesaikan pendidikan sarjana (S-1) pada
Departemen Teknik Elektro Sub konsentrasi Teknik Energi Listrik
Oleh
Muhammad Zein
NIM : 110402010
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
i ABSTRAK
Motor induksi merupakan motor arus bolak balik yang paling sering
digunakan dalam dunia industri maupun rumah tangga. Permasalahan tegangan
tidak seimbang yang menyuplai motor induksi tiga phasa merupakan salah satu
masalah dalam pengoprasian motor induksi tiga phasa.
Oleh karena itu perlu dilakukan suatu kajian baik berupa analisis maupun
penelitian di labratorium untuk melihat bagaimana ketidakseimbangan tegangan
mempengaruhi kenaikan temperatur pada motor induksi, serta membandingkan
temperature motor induksi hasil pengukuran yang didapat dengan menggunakan
thermometer infrared dan dengan metode mengukur resistansi motor induksi
tersebut.
Motor induksi tiga phasa dalam keadaan suplai tegangan tidak seimbang
terjadi kenaikan temperatur yang lebih tinggi dibandingkan pada saat motor
induksi tiga phasa disuplai tegangan seimbang yaitu 0.1233 0C/menit untuk
tegangan seimbang, 0.47 0C/menit untuk unbalanced 1% dan 0.703 0C/menit
untuk unbalanced 3% pengukuran menggunakan thermometer infrared.
Sedangkan pengukuran menggunakan pengukuran resistansi yaitu 0.19967
0
C/menit untuk tegangan seimbang, 0.567 0C/menit untuk unbalanced 1% dan
ii
KATA PENGANTAR
Segala puji dn syukur penulis panjatkan kehadirat Allah SWT, karena atas
berkat rahmat dan ridho-Nya Tugas Akhir ini dapat diselesaikan. Tidak lupa juga
shalawat beriring salam penulis haturkan kepada junjungan Nabi Besar
Muhammad SAW.
Tugas akhir ini merupakan bagian dari kurikulum yang harus diselesaikan
untuk memenuhi persyaratan dalam menyelesaikan pendidikan Sarjana Strata Satu
di Departemen Teknik Elektro, Universitas Sumatera Utara. Adapun judul Tugas
Akhir ini adalah :
“ANALISIS PENGARUH TEGANGAN TIDAK SEIMBANG TERHADAP TEMPERATUR MOTOR INDUKSI TIGA PHASA”
Tugas Akhir ini penulis persembahkan kepada yang teristimewa yaitu
Ayahanda (Sukaswan) beserta Ibunda (Nurbaiti) dan kakak saya (Sri Rahayu)
yang selalu memberikan semangat dan mendoakan penulis selama masa studi
hingga menyelesaikan Tugasa Akhir ini.
Selama masa kuliah hingga penyelesaian tugas akhir ini, penulis juga
banyak mendapatkan dukungan maupun bantuan dari berbagai pihak. Untuk itu
penulis ingin menyampaikan rasa terima kasih yang mendalam kepada :
1. Bapak Ir. Syamsul Amien, M.S., selaku dosen Pembimbing Tugas Akhir
serta Kepala Laboratorium Konversi Energi Listrik yang telah banyak
iii
bimbingan, dan pengarahan kepada penulis selama perkuliahan hingga
penyusunan Tugas Akhir ini.
2. Bapak Ir. Surya Tarmizi Kasim M.Si., selaku dosen Penguji Tugas Akhir
serta selaku Ketua Departemen Teknik Elektro FT USU yang telah
banyak memberikan masukan demi perbaikan Tugas Akhir ini dan telah
banyak motivasi selama masa perkuliahan.
3. Bapak Raja Harahap S.T., M.T., selaku Dosen Penguji Tugas Akhir dan
telah banyak memberikan masukan demi perbaikan Tugas Akhir ini serta
senantiasa memberikan bimbingan selama perkuliahan.
4. Seluruh Bapak dan Ibu dosen yang telah mendidik serta memberikan
pengalaman hidup yang berharga selama masa perkuliahan kepada
penulis.
5. Seluruh staf pegawai Departemen Teknik Elektro FT USU yang telah
membantu penulis dalam pengurusan administrasi saat perkuliahan serta
selama penyusunan tugas akhir.
6. Sahabat setia Astri Irtanti yang selalu mendoakan kesuksesan penulis
dalam setiap kesempatan.
7. Laboran dan rekan asisten Laboratorium Konversi Energi Listrik om
Roy, bang Dhuha, bang Djaka, bang Diky, bang Bambang, dan Aspar
yang selalu membantu dan tidak bosan-bosannya membagikan
pengalaman selama masa perkuliahan.
8. Rekan- rekan satu angkatan 2011 Teknik Elektro Endra, Aspar, Angga,
iv
selalu saling member semangat, bantuan, cerita, dan warna selama
perkuliahan.
9. Seluruh abang dan kakak senior bang Irsyad, bang Suwen, Bg Robby,
dan Bang Bere, serta adik-adik junior Alvi, Akbar, Totti, Ryan, dan
Salim yang memberikan dukungan dan bantuan.
10. Semua pihak yang tidak dapat penulis tuliskan satu persatu.
Penulis menyadari bahwa dalam penulis Tugas Akhir ini masih belum
sempurna karena masih terdapat banyak kekurangan baik dari segi isi maupun
susunan bahasanya. Saran dan kritik dari pembaca dengan tujuan
menyempurnakan dan mengembangkan kajian dalam bidang ini sangat penulis
harapkan. Akhir kata, penulis berharap semoga penulisan Tugas Akhir ini dapat
berguna bagi kita semua dan hanya kepada Allah SWT-lah penulis menyerahkan
diri.
Medan, Oktober 2015
Penulis
v
DAFTAR ISI
KATA PENGANTAR ... i
ABSTRAK ... iv
DAFTAR ISI ... v
DAFTAR GAMBAR ... vii
DAFTAR TABEL ... x
BAB I PENDAHULUAN 1.1. Latar Belakang ... 1
1.2. Rumusan Masalah ... 2
1.3. Tujuan Penelitian ... 3
1.4. Batasan Masalah ... 3
1.5. Manfaat Penelitian ... 4
BAB II TINJAUAN PUSTAKA 2.1. Motor Induksi ... 5
2.2. Konstruksi Motor Induksi ... 5
2.3. Medan Putar ... 6
2.4. Prinsip Kerja Motor Induksi ... 8
vi
2.6. Penentuan Parameter Motor Induksi ... 14
2.6.1 Pengujian Tanpa Beban (No Load Test) ... 14
2.6.2 Pengujian Tahanan Stator (DC Test) ... 16
2.6.3 Pengujian Rotor Tertahan (Block Rotor Test) ... 17
2.7 Tegangan Tidak Seimbang ... 19
2.8 Rating Temperatur dan Metode Pengukuran Temperatur Motor Induksi 23 BAB III METODE PENELITIAN 3.1. Tempat dan Waktu ... 27
3.2. Peralatan yang Digunakan ... 27
3.3. Variabel yang Diamati ... 28
3.4 Prosedur Penelitian ... 28
3.5 Pelaksanakan Penelitian ... 32
3.5.1 Proses Pengumpulan Data ... 32
3.5.2 Melakukan Analisa Data ... 32
BAB IV HASIL PENELITIAN DAN PEMBAHASAN 4.1. Umum ... 33
4.2. Data Percobaan ... 33
vii
4.2.2 Motor Induksi Tiga Phasa dengan Suplai Tegangan Tidak
Seimbang ... 34
4.3 Analisa Data... 36
4.3.1 Motor Induksi Tiga Phasa dengan Suplai Tegangan Seimbang 36
4.3.2 Motor Induksi Tiga Phasa dengan Suplai Tegangan Tidak
Seimbang ... 41
4.3.3 Perbandingan Hasil Pengukuran Temperatur Motor Induksi
Tiga Phasa Suplai Tegangan Seimbang dengan Suplai
Tegangan Tidak Seimbang ... 49
4.3.4 Perbandingan Hasil Pengukuran temperatur Motor Induksi Tiga
Phasa Menggunakan Thermometer Infrared dan Hasil Perhitungan
Temperatur Menggunakan Metode Pengukuran Resistansi ... 51
4.3.5 Waktu yang Diperbolehkan Untuk Terjadi Ketidakseimbangan
Tegangan Pada Motor Induksi Tiga Phasa ... 54
BAB V KESIMPULAN DAN SARAN
5.1 Kesimpulan ... 58
5.2 Saran ... 59
viii
DAFTAR GAMBAR
Gambar 2.1 Penampan inti stator dan stator motor induksi ... 6
Gambar 2.2 Arus tiga phasa peimbang ... 7
Gambar 2.3 Diagram phasor fluksi tiga phasa seimbang ... 7
Gambar 2.4 Medan putar pada motor induksi tiga phasa ... 7
Gambar 2.5 Rangkaian ekivalen motor induksi sebagai model transfomator 11
Gambar 2.6 Rangkaian ekivalen rotor motor induksi ... 12
Gambar 2.7 Rangkaian ekivalen motor induksi jika rugi-ugi inti diabaikan . 13
Gambar 2.8 Rangkaian ekivalen motor induksi pada percobaan beban nol ... 16
Gambar 2.9 Rangkaian pengukuran untuk DC test ... 17
Gambar 2.10 Rangkaian ekivalen motor induksi percobaan block rotor test 17
Gambar 2.11 Diagram vector tegangan seimbang dan diagram vector tegangan tidak seimbang ... 20
Gambar 2.12 Diagram vector urutan positif, urutan negatif, dan urutan nol . 20
Gambar 2.13 Kurva penurunan rating motor induksi (NEMA) ... 23
Gambar 3.1 Rangkaian percobaan pengukuran suhu motor induksi tiga phasa dengan menggunakan thermometer infrared ... 28
ix
Gambar 3.3 Rangkaian kontrol pengukuran resistansi dengan DC test ... 29
Gambar 4.1 Grafik suhu vs menit untuk motor induksi tiga phasa suplai tegangan seimbang pengukuran suhu menggunakan thermometer infrared 39
Gambar 4.2 Grafik suhu vs menit untuk motor induksi tiga phasa suplai tegangan seimbang pengukuran suhu menggunakan metode
pengukuran resistansi ... 39
Gambar 4.3 Grafik suhu vs menit untuk motor induksi tiga phasa suplai tegangan tidak seimbang 1% pengukuran suhu menggunakan
thermometer infrared ... 46
Gambar 4.4 Grafik suhu vs menit untuk motor induksi tiga phasa suplai tegangan tidak seimbang 3% pengukuran suhu menggunakan thermometer
infrared ... 46
Gambar 4.5 Grafik suhu vs menit untuk motor induksi tiga phasa suplai
tegangan tidak seimbang 1% pengukuran suhu menggunakan metode
pengukuran resistansi ... 47
Gambar 4.6 Grafik suhu vs menit untuk motor induksi tiga phasa suplai
tegangan tidak seimbang 3% pengukuran suhu menggunakan metode
pengukuran resistansi ... 47
Gambar 4.7 Grafik suhu vs menit untuk motor induksi tiga phasa suplai tegangan seimbang dan suplai tegangan tidak seimbang 1% dan 3%
x
Gambar 4.7 Grafik suhu vs menit untuk motor induksi tiga phasa suplai tegangan seimbang dan suplai tegangan tidak seimbang 1% dan 3%
pengukuran suhu menggunakan metode pengukuran resistansi .
... 50
Gambar 4.8 Grafik perbandingan hasil pengukuran temperatur menggunakan thermometer infrared dan perhitungan menggunakan metode
pengukuran resistansi untuk suplai tegangan seimbang ... 52
Gambar 4.9 Grafik perbandingan hasil pengukuran temperatur menggunakan thermometer infrared dan perhitungan menggunakan metode
pengukuran resistansi untuk suplai tegangan tidak seimbang 1% 53
Gambar 4.10 Grafik perbandingan hasil pengukuran temperatur menggunakan thermometer infrared dan perhitungan menggunakan metode
xi
DAFTAR TABEL
Tabel 2.1 Distribusi reaktansi X1 dan X2 pada berbagai desain motor
Induksi ... 19
Tabel 2.2 Temperature rise for large motors with 1.0 sevice factor ... 24
Tabel 4.1 Data hasil pengukuran suhu dengan thermometer infrared ... 33
Tabel 4.2 Data hasil percobaan DC test pada motor induksi tiga phasa ... 33
Tabel 4.3 Data hasil pengukuran suhu dengan suplai tegangan tidak seimbang 1% menggunakan thermometer infrared ... 34
Tabel 4.4 Data hasil pengukuran suhu dengan suplai tegangan tidak seimbang 3% menggunakan thermometer infrared ... 35
Tabel 4.5 Data hasil pengukuran DC test dengan suplai tegangan tidak seimbang 1% ... 36
Tabel 4.6 Data hasil pengukuran DC test dengan suplai tegangan tidak seimbang 3% ... 37
Tabel 4.7 Data hasil perhitungan suhu motor induksi tiga phasa tegangan seimbang menggunakan metode pengukuran resistansi ... 37
Tabel 4.8 Data hasil perhitungan suhu motor induksi tiga phasa tegangan tidak seimbang 1% menggunakan metode pengukuran resistansi ... 44
xii
Tabel 4.10 Perbandingan kenaikan suhu suplai tegangan seimbang dan tidak seimbang 1% dan 3% menggunakan thermometer infrared ... 48
Tabel 4.11 Perbandingan kenaikan suhu suplai tegangan seimbang dan tidak seimbang 1% dan 3% menggunakan metode pengukuran resistansi
... 49
Tabel 4.12 Perbandingan Hasil Pengukuran Thermometer Infrared dan Hasil Perhitungan dengan Metode Pengukuran Resistansi ... 51