SIMULASI PENGARUH TEGANGAN TIDAK SEIMBANG DAN
TERDISTORSI HARMONISA TERHADAP TORSI DAN PUTARAN
MOTOR INDUKSI TIGA FASA MENGGUNAKAN MATLAB 7.0.4
OLEH :
NAMA :
HAOGOARO J WARUWU
NIM :
070402072
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
ABSTRAK
Motor induksi tiga fasa memilki keluaran berupa torsi untuk
menggerakkan beban. Pada kondisi suplai yang normal, motor induksi akan
beroperasi sesuai dengan ratingnya, namun pada saat kondisi suplai mengalami
gangguan, hal ini mengakibatkan motor induksi tiga fasa beroperasi tidak sesuai
dengan ratingnya.
Dalam tugas akhir ini dibahas karakteristik torsi dan putaran motor induksi
tiga fasa pada saat tegangan yang disuplai ke terminal stator merupakan tegangan
tidak seimbang dan terdistorsi harmonisa sehingga akan terlihat perbedaan torsi
dan putaran motor induksi tiga fasa pada saat disuplai tegangan seimbang
berharmonisa dengan pada saat disuplai tegangan tidak seimbang berharmonisa.
Dan juga akan terlihat karakteristik torsi dan putaran pada saat persentase
ketidakseimbangan tegangan dan persentase tegangan terdistorsi semakin
KATA PENGANTAR
Puji syukur penulis panjatkan kepada Tuhan Yang Maha Esa atas segala
berkat dan rahmat diberikan-Nya kepada penulis, sehingga penulis dapat
menyelesaikan Tugas Akhir yang berjudul “Simulasi Pengaruh Tegangan Tidak
Seimbang dan Terdistorsi Harmonisa Terhadap Torsi dan Putaran Motor Induksi
Tiga Fasa Menggunakan Matlab 7.0.4”. Penulisan Tugas Akhir ini merupakan
salah satu persyaratan untuk menyelesaikan studi dan memperoleh gelar Sarjana
Teknik di Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera
Utara.
Tugas Akhir ini penulis persembahkan untuk kedua orang tua yang telah
membesarkan dan mengarahkan penulis dengan kasih sayang yang tak ternilai
harganya, yaitu Bismar Waruwu dan Tinur Tambunan, atas seluruh perhatian dan
dukungannya hingga penulis dapat menyelesaikan Tugas Akhir ini dengan baik.
Selama masa kuliah sampai masa penyelesaian Tugas Akhir ini, penulis
mendapat dukungan, bimbingan, dan bantuan dari berbagai pihak. Untuk itu,
dengan setulus hati penulis hendak menyampaikan ucapan terima kasih yang
sebesar-besarnya kepada:
1.
Bapak Ir. Riswan Dinzi, MT selaku Dosen Pembimbing Tugas Akhir yang
telah banyak meluangkan waktu dan pikirannya untuk memberikan bantuan,
bimbingan, dan pengarahan kepada penulis selama penyusunan Tugas Akhir
ini.
3.
Bapak Ir. Surya Tarmizi Kasim M,si selaku Ketua Departemen Teknik Elektro
FT USU dan Bapak Rahmat Fauzi, ST, MT. selaku Sekretaris Departemen
Teknik Elektro FT USU.
4.
Bapak Ir. Zulkarnaen Pane, selaku staf pengajar dan Kepala Laboratorium
Distribusi dan Transmisi Departemen Teknik Elektro FT USU.
5.
Seluruh staf pengajar dan administrasi Departemen Teknik Elektro, Fakultas
Teknik Universitas Sumatera Utara.
6.
Teman-teman assisten di Laboratorium Distribusi dan Transmisi: Ahmad
Suhendra dan Reza Budianto.
7.
Teman-teman stambuk 2007: Sandro pakpahan, Setia, Sopian, Lamhot, Josua,
Kendri, Hotbe, Kaban, jhon TBS, Rocky, Asyer, Leo, Rhamceis, Janes Satria,
Rumonda, Yoakim, Cimet dan teman-teman 2007 lain yang tidak dapat
penulis sebutkan satu per satu.
8.
Semua orang yang tidak dapat penulis sebutkan satu per satu, penulis ucapkan
terima kasih banyak.
Penulis menyadari bahwa Tugas Akhir ini masih jauh dari kesempurnaan.
Masih banyak terdapat kesalahan dan kekurangan. Untuk itu, penulis akan
menerima dengan terbuka segala kritik dan saran yang membangun untuk
memperbaiki Tugas Akhir ini. Akhir kata, semoga Tugas Akhir ini bermanfaat
bagi penulis dan pembaca.
Medan, Juli 2011
Penulis,
DAFTAR ISI
Hal.
ABSTRAK ...
i
KATA PENGANTAR ...
ii
DAFTAR ISI ... iv
DAFTAR GAMBAR... vi
BAB I
PENDAHULUAN ...
1
1.1
Latar Belakang ...
1
1.2
Rumusan Masalah ...
2
1.3
Tujuan Penulisan ...
2
1.4
Manfaat Penulisan ...
2
1.5
Batasan Masalah ...
3
1.6
Metode Penelitian ...
3
1.7
Sistematika Penulisan ...
3
BAB II MOTOR INDUKSI...
6
2.1
Umum ...
6
2.2
Konstruksi Motor Induksi Tiga Fasa ...
6
2.3
Medan Putar ... 10
2.4
Slip………... 12
2.5
Prinsip Kerja Motor Induksi Tiga Fasa ... 12
2.6
Rangkaian Ekivalen Motor Induksi TIga fasa ... 14
2.6.1 Rangkaian Ekivalen Stator ... 15
2.6.3 Rangkaian Ekivalen Lengkap ... 19
2.7 Analisis Rangkaian Ekivalen ... 21
2.8 Penentuan Parameter Rangkaian Ekivalen Motor Induksi ... 23
2.9 Aliran Daya dan Efisiensi Motor Induksi ... 27
2.9.1 Aliran Daya ... 27
2.9.2 Efisiensi ... 28
BAB III TEGANGAN TIDAK SEIMBANG DAN HARMONISA ... 30
3.1 Umum. ... 30
3.2 Komponen Simetris. ... 31
3.2.1 Komponen Urutan Positif ... 32
3.2.2 Komponen Urutan Negatif ... 33
3.2.3 Komponen Urutan Nol ... 34
3.3 Defenisi Tegangan Tidak Seimbang ... 37
3.4 Deret Fourier ... 39
3.5 Jenis – Jenis Harmonisa ... 41
3.6 Analisis Operasi Motor Induksi Tiga Fasa Disuplai Tegangan
Tidak Seimbang ... 45
3.7 Analisis Harmonisa Pada Motor Induksi Tiga Fasa ... 50
BAB IV SIMULASI PENGARUH TEGANGAN TIDAK SEIMBANG
TERDISTORSI HARMONISA TERHADAP TORSI DAN PUTARAN
MOTOR INDUKSI TIGA FASA. ... 64
4.1 Umum ... 64
4.2 Rangkaian Simulasi ... 65
4.3 Spesifikasi Model Rangkaian Simulasi ... 67
4.4 Simulasi dan Hasil Simulasi ... 70
BAB V PENUTUP ... 95
5.1 Kesimpulan ... 95
5.2 Saran ... 96
DAFTAR PUSTAKA ... 97
DAFTAR GAMBAR
Hal.
Gambar 2.1
Konstruksi Motor Induksi Tiga Fasa ...
7
Gambar 2.2
Komponen Stator Motor Induksi Tiga Fasa...
8
Gambar 2.3
Tipikal Rotor Sangkar dan Motor Induksi Rotor Sangkar...
9
Gambar 2.4
Tipikal Rotor Belitan dan Motor Induksi Rotor Belitan...
9
Gambar 2.5
(a) Kondisi t
0dan t
4, (b) Kondisi t
1, (c) Kondisi t
2, (d)
Kondisi t
3...
11
Gambar 2.6
Rangkaian Ekivalen Stator Per-Fasa Motor Induksi ...
16
Gambar 2.7
Rangkaian Ekivalen Per-Fasa Rotor Motor Induksi
Keadaan Diam ...
16
Gambar 2.8
Rangkaian Ekivalen Per-Fasa Rotor Motor Induksi
Keadaan Berputar Pada Slip = S ...
19
Gambar 2.9
Rangkaian Ekivalen Motor Induksi Tiga Fasa ...
20
Gambar 2.10
Rangkaian Ekivalen Per-Fasa Motor Induksi Dengan
Bagian Rangkaian Rotor Dinyatakan Terhadap Sisi Stator
(a) Dengan Tahanan Konstan, (b) Dengan Tahanan
Variabel ...
20
Gambar 2.11
Rangkaian Ekivalen Per-Fasa Motor Induksi Tanpa Rugi
Inti...
21
Gambar 2.12
Rangkaian Ekivalen Motor Induksi ...
22
Gambar 2.13
Rangkaian Ekivalen Motor Induksi Beban Nol ...
24
Gambar 2.14
Rangkaian Ekivalen Motor Induksi rotor Tertahan ...
25
Gambar 3.1
(a) Gelombang Tegangan Tiga Fasa Seimbang, (b)
Gelombang Tegangan Tiga Fasa Tidak Seimbang, (c)
Gelombang Tegangan Tiga Fasa Tidak Seimbang dan
Terdistorsi Harmonisa ...
31
Gambar 3.2
Fasor Tegangan Urutan Positif...
33
Gambar 3.3
Fasor Tegangan Urutan Negatif ...
34
Gambar 3.4
Fasor Tegangan Urutan Nol ...
34
Gambar 3.5
(a) Rangkaian Ekivalen Motor Induksi Tiga Fasa Urutan
Positif, (b) Rangkaian Ekivalen Motor Induksi Tiga Fasa
Urutan Negatif ...
46
Gambar 3.6
Rangkaian Ekivalen Motor Induksi Oleh Harmonisa
Ruang ...
51
Gambar 3.7
Rangkaian Ekivalen Motor Induksi Oleh Harmonisa
Waktu ...
53
Gambar 3.8
Rangkaian Ekivalen Motor Induksi Tiga Fasa Disuplai
Tegangan Tidak Seimbang dan Terdistosi Harmonisa (a)
Urutan Positif, (b) Urutan Negatif ...
59
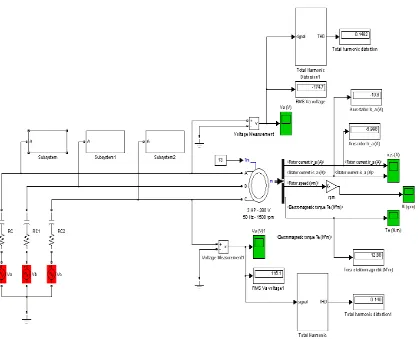
Gambar 4.1
Rangkaian Simulasi Analisis Pengaruh Tegangan Tidak
Seimbang dan Terdistorsi Harmonisa Terhadap Torsi dan
Putaran Motor Induksi Tiga Fasa ...
65
Gambar 4.2
Rangkaian Penyearah Pada Subsystem...
66
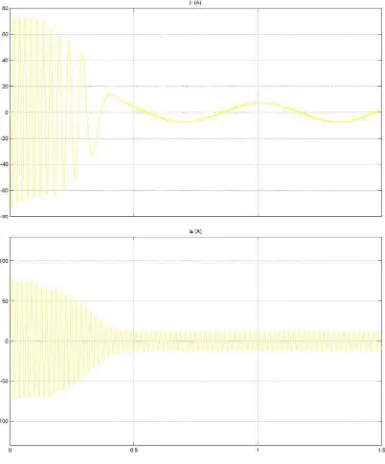
Gambar 4.3
Grafik arus stator dan rotor Hasil Simulasi Tegangan Seimbang dan tidak Terdistorsi Harmonisa ... 71Gambar 4.5
Grafik putaran Hasil Simulasi Tegangan Seimbang dan tidakTerdistorsi Harmonisa ... 73
Gambar 4.6
Grafik arus stator dan rotor Hasil Simulasi Tegangan Seimbangdan Terdistorsi Harmonisa Sebesar 9%
...
74
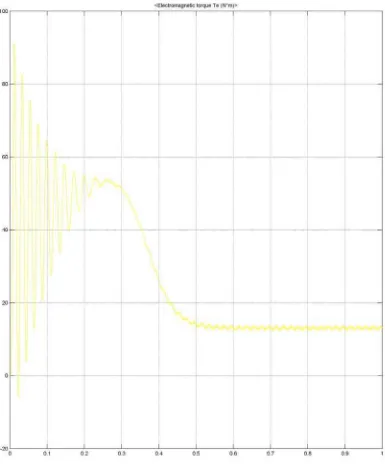
Gambar 4.7
Grafik torsi Hasil Simulasi Tegangan Seimbang dan TerdistorsiHarmonisa Sebesar 9%
...
75
Gambar 4.8
Grafik putaran Hasil Simulasi Tegangan Seimbang danTerdistorsi Harmonisa Sebesar 9%
...
76
Gambar 4.9
Grafik arus stator dan rotor Hasil Simulasi Tegangan Seimbangdan Terdistorsi Harmonisa Sebesar 14,8%
...
77
Gambar 4.10
Grafik Torsi Hasil Simulasi Tegangan Seimbang danTerdistorsi Harmonisa Sebesar 14,8%
...
78
Gambar 4.11
Grafik Putaran Hasil Simulasi Tegangan Seimbang danTerdistorsi Harmonisa Sebesar 14,8% ... 79
Gambar 4.12
Grafik arus stator dan rotor Hasil Simulasi Tegangan Seimbangdan Terdistorsi Harmonisa Sebesar 22,4% ... 80
Gambar 4.13
Grafik torsi Hasil Simulasi Tegangan Seimbang dan TerdistorsiHarmonisa Sebesar 22,4% ... 81
Gambar 4.14
Grafik putaran Hasil Simulasi Tegangan Seimbang danTerdistorsi Harmonisa Sebesar 22,4% ... 82
Gambar 4.15
Grafik arus stator dan rotor Hasil Simulasi Tegangan tidakSeimbang 32,8% dan Terdistorsi Harmonisa Sebesar 9% ... 83
Gambar 4.16
Grafik Torsi Hasil Simulasi Tegangan tidak Seimbang 32,8%dan Terdistorsi Harmonisa Sebesar 9% ... 84
Gambar 4.17
Grafik Putaran Hasil Simulasi Tegangan tidak Seimbang 32,8%Gambar 4.18
Grafik arus stator dan rotor Simulasi Tegangan tidak Seimbang55,19% dan Terdistorsi Harmonisa Sebesar 9% ... 86
Gambar 4.19
Grafik torsi Hasil Simulasi Tegangan tidak Seimbang 55,19%dan Terdistorsi Harmonisa Sebesar 9% ... 87
Gambar 4.20
Grafik Putaran Hasil Simulasi Tegangan tidak Seimbang55,19% dan Terdistorsi Harmonisa Sebesar 9% ... 88
Gambar 4.21
Grafik arus stator dan rotor Simulasi Tegangan tidak Seimbang32,8% dan Terdistorsi Harmonisa Sebesar 22,4% ... 89
Gambar 4.22
Grafik torsi Hasil Simulasi Tegangan tidak Seimbang 32,8%dan Terdistorsi Harmonisa Sebesar 22,4% ... 90
Gambar 4.23
Grafik Putaran Hasil Simulasi Tegangan tidak Seimbang 32,8%dan Terdistorsi Harmonisa Sebesar 22,4% ... 91
Gambar 4.24
Grafik arus stator dan rotor Simulasi Tegangan tidak Seimbang55,19% dan Terdistorsi Harmonisa Sebesar 22,4% ... 92
Gambar 4.25
Grafik torsi Hasil Simulasi Tegangan tidak Seimbang 55,19%dan Terdistorsi Harmonisa Sebesar 22,4% ... 93
Gambar 4.26
Grafik Putaran Hasil Simulasi Tegangan tidak SeimbangABSTRAK
Motor induksi tiga fasa memilki keluaran berupa torsi untuk
menggerakkan beban. Pada kondisi suplai yang normal, motor induksi akan
beroperasi sesuai dengan ratingnya, namun pada saat kondisi suplai mengalami
gangguan, hal ini mengakibatkan motor induksi tiga fasa beroperasi tidak sesuai
dengan ratingnya.
Dalam tugas akhir ini dibahas karakteristik torsi dan putaran motor induksi
tiga fasa pada saat tegangan yang disuplai ke terminal stator merupakan tegangan
tidak seimbang dan terdistorsi harmonisa sehingga akan terlihat perbedaan torsi
dan putaran motor induksi tiga fasa pada saat disuplai tegangan seimbang
berharmonisa dengan pada saat disuplai tegangan tidak seimbang berharmonisa.
Dan juga akan terlihat karakteristik torsi dan putaran pada saat persentase
ketidakseimbangan tegangan dan persentase tegangan terdistorsi semakin
BAB I
PENDAHULUAN
1.1 Latar Belakang
Motor listrik merupakan beban listrik yang paling banyak digunakan di dunia,
Lebih dari 90% motor listrik ini merupakan motor induksi tiga fasa yang banyak
digunakan di bidang industri dan rumah tangga. Semua motor induksi tiga fasa telah di
desain untuk bekerja pada keadaan normal, namun tegangan pada jaringan listrik
sebenarnya telah terdistorsi oleh harmonisa tegangan yang disebabkan oleh
penggunaan peralatan beban non linier.
Selain terdistorsi harmonisa tegangan, tegangan tiga fasa yang menyuplai motor
induksi tiga fasa juga dapat ditemukan dalam keadaan tidak seimbang, kondisi ini
disebabkan oleh adanya gangguan – gangguan asimetri pada sistem tenaga, distribusi
beban – beban satu fasa yang terdistribusi tidak merata pada sistem tenaga yang sama,
juga impedansi tidak seimbang dari transformator penyuplai terhadap motor induksi
tiga fasa, dan lain sebagainya.
Pada saat motor induksi tiga fasa disuplai oleh tegangan tidak seimbang dan
tegangan yang terdistorsi, kondisi ini akan mempengaruhi karakteristik operasi dan
efisiensi kerja motor induksi tiga fasa. Oleh karena itu perlu dilakukan analisa pengaruh
tegangan tidak seimbang berharmonisa pada motor induksi tiga fasa. Hal inilah yang
mendorong penulis untuk menyelidiki lebih jauh tentang pengaruh tegangan tidak
1.2 Rumusan Masalah
Dari latar belakang di atas, dapat dirumuskan beberapa permasalahan yang
akan dibahas dalam tugas akhir ini, yaitu :
1. Apakah harmonisa dan tegangan tidak seimbang itu ?
2. Bagaimana karakteristik torsi motor induksi tiga fasa apabila disuplai tegangan
tidak seimbang dan terdistorsi harmonisa ?
1.3 Tujuan Penulisan
Adapun tujuan penulisan Tugas Akhir ini adalah menyelidiki pengaruh tegangan
tidak seimbang dan terdistorsi harmonisa terhadap torsi dan putaran motor induksi tiga
fasa yang dilakukan dengan membandingkan persentase ketidakseimbangan tegangan
dengan persentase tegangan terdistorsi harmonisa terhadap torsi dan putaran motor
induksi tiga fasa. sehingga dapat diketahui seberapa besar gangguan terhadap torsi dan
putaran seiring kenaikan persentase tegangan tidak seimbang dengan persentase
harmonisa tersebut
1.4Manfaat Penulisan
Laporan Tugas Akhir ini diharapkan dapat bermanfaat untuk memberikan
informasi kepada penulis dan pembaca mengenai pengaruh suplai tegangan tidak
seimbang dan terdistorsi harmonisa terhadap torsi dan putaran motor induksi tiga fasa
dan dapat dijadikan bahan pertimbangan dalam memperhitungkan gangguan torsi dan
putaran motor induksi tiga fasa pada saat disuplai tegangan tidak seimbang dan
1.5 Batasan Masalah
Untuk menghindari pembahasan yang meluas maka penulis akan membatasi
pembahasan tugas akhir ini dengan hal-hal sebagai berikut:
1. Tidak menganalisa hal – hal yang menyebabkan tegangan tidak seimbang dan
harmonisa tegangan.
2. Percobaan dilakukan pada saat steady state.
3. Tidak memperhitungkan rugi inti dan rugi mekanik.
4. Tidak memperhitungkan harmonisa ruang pada motor induksi tiga fasa.
5. Tidak membahas gangguan yang terjadi pada motor induksi tiga fasa.
6. Tidak memperhitungkan efek kulit pada motor induksi tiga fasa.
1.6 Metode Penulisan
Metode penulisan yang digunakan dalam penulisan tugas akhir ini adalah:
1. Studi literatur, yaitu berupa studi kepustakaan dan kajian dari buku-buku teks
pendukung, artikel dari internet, jurnal yang berkaitan dengan penulisan Tugas
Akhir ini.
2. Studi Bimbingan, yaitu berupa tanya jawab dengan dosen pembimbing
mengenai masalah-masalah yang timbul selama penulisan Tugas Akhir ini.
1.7 Sistematika Penulisan
Untuk memudahkan pemahaman terhadap Tugas Akhir ini maka penulis
BAB I PENDAHULUAN
Bagian ini merupakan pendahuluan yang berisikan tentang latar belakang
masalah, rumusan masalah, tujuan penulisan, manfaat penulisan, batasan masalah,
metode penulisan, dan sistematika penulisan.
BAB II MOTOR INDUKSI TIGA PHASA
Bagian ini membahas tentang motor induksi tiga fasa secara umum, konstruksi, medan putar, prinsip kerja, rangkaian ekivalen, analisis rangkaian ekivalen, penentuan parameter motor induksi tiga phasa, analisis aliran daya dan efisiensi.
BAB III TEGANGAN TIDAK SEIMBANG DAN HARMONISA
Bagian ini membahas tegangan tidak seimbang dan harmonisa secara umum,
komponen simetris, defenisi tegangan tidak seimbang, deret fourier, jenis – jenis
harmonisa, analisis operasi motor induksi yang disuplai tegangan tidak seimbang,
analisis operasi motor induksi yang disuplai tegangan terdistorsi harmonisa, dan analisis
operasi motor induksi tiga fasa yang disuplai tegangan tidak seimbang dan terdistorsi
harmonisa.
BAB IV ANALISIS PENGARUH TEGANGAN TIDAK SEIMBANG DAN TERDISTORSI
HARMONISA TERHADAP TORSI DAN EFISIENSI MOTOR INDUKSI TIGA FASA
Bagian ini menguraikan data – data percobaan motor induksi tiga fasa yang
disuplai tegangan seimbang, tegangan tidak seimbang, dan tegangan tidak seimbang
terdistorsi harmonisa, kemudian melakukan penghitungan menggunakan program
matlab dan pada akhirnya dapat ditampilkan perbedaan kinerja motor induksi tiga fasa
BAB V : KESIMPULAN DAN SARAN
Bagian ini memberikan kesimpulan dari awal sampai selesai penelitian dan
BAB II
MOTOR INDUKSI TIGA FASA
2.1 Umum
Motor listrik merupakan beban listrik yang paling banyak digunakan di dunia,
Motor induksi tiga fasa adalah suatu mesin listrik yang mengubah energi listrik menjadi
energi gerak dengan menggunakan gandengan medan listrik dan mempunyai slip antara
medan stator dengan medan rotor. Penamaan motor ini berasal dari kenyataan bahwa
arus rotor motor ini bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang
terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan
putar yang dihasilkan arus stator.
Motor induksi memiliki konstruksi yang kuat, sederhana, handal, serta berbiaya
murah. Di samping itu motor ini juga memiliki effisiensi yang tinggi saat keadaan normal
dan tidak membutuhkan perawatan yang banyak. Namun, motor induksi memiliki
kelemahan dalam hal pengaturan kecepatan. Dimana pada motor induksi pengaturan
kecepatan tidak bisa dilakukan tanpa merubah efisensi.
2.2 Konstruksi Motor Induksi Tiga Fasa
Secara umum konstruksi motor induksi tiga fasa terdiri dari stator dan rotor.
Stator merupakan bagian dari mesin yang tidak berputar dan terletak pada bagian luar.
Sedangkan rotor merupakan bagian dari mesin yang berputar dan letaknya pada bagian
Gambar 2.1 Konstruksi motor induksi tiga fasa
1. Stator
Stator adalah bagian dari mesin yang tidak berputar yang terletak pada bagian
luar dan merupakan tempat mengalirkan arus beban. Stator terbuat dari besi bundar
berlaminasi yang mempunyai alur – alur sebagai tempat meletakkan kumparan. Elemen
laminasi inti dibentuk dari lembaran besi (Gambar 2.2 (a)), tiap lembaran besi tersebut
memiliki beberapa alur dan beberapa lubang pengikat untuk menyatukan inti. Tiap
kumparan tersebar dalam alur yang disebut belitan phasa dimana untuk motor tiga
phasa, belitan tersebut terpisah secara listrik sebesar 120o. Alur pada tumpukan laminasi
inti diisolasi dengan kertas (Gambar 2.2.(b)). Kemudian tumpukan inti dan belitan stator
diletakkan dalam cangkang silindris (Gambar 2.2.(c)). Berikut ini contoh lempengan
laminasi inti, lempengan inti yang telah disatukan, dan belitan stator yang telah
dilekatkan pada cangkang luar untuk motor induksi tiga phasa.
(a) Lempengan inti
(b) Tumpukan inti dengan isolasi kertas
(c) Tumpukan inti dan kumparan dalam cangkang stator.
2. Rotor
Rotor adalah bagian dari mesin yang berputar dan letaknya pada bagian dalam.
Pada motor induksi terdapat dua tipe rotor yang berbeda yaitu rotor sangkar tupai dan
rotor belitan. Kedua tipe rotor ini menggunakan laminasi melingkar yang terikat erat
pada poros. Penampang rotor sangkar tupai memiliki konstruksi yang sederhana. Batang
rotor dan cincin ujung sangkar tupai yang kecil merupakan coran tembaga atau
aluminium dalam satu lempeng pada inti rotor. Pada motor yang lebih besar, batang
rotor dibenamkan dalam alur rotor dan kemudian di las dengan kuat ke cincin ujung.
Apabila dilihat tanpa inti rotor, maka batang rotor ini kelihatan seperti kandang
tupai.oleh karena itu motor induksi dengan rotor sangkar tupai dinamakan motor
induksi sangkar tupai.
Pada ujung cincin penutup delekatkan kipas yang berfungsi sebagai pendingin.
Rotor jenis ini tidak terisolasi, karena batangan dialiri arus yang besar pada tegangan
rendah. Motor induksi dengan rotor sangkar tupai ditunjukkan pada Gambar 2.3.
Gambar 2.3 (a) tipikal rotor sangkar, (b) motor induksi rotor sangkar. Batang poros
Cincin aluminium
aluminium
(a)
Pada tipe rotor belitan, slot rotor menampung belitan terisolasi yang mirip
dengan belitan pada stator. Belitan rotor terdistribusi merata, biasanya terhubung
bintang dan masing – masing ujung fasa terbuka yang terhubung pada cincin slip yang
terpasang pada rotor. Pada motor rotor belitan, sikat karbon menekan cincin slip, oleh
karena itu tahanan eksternal dapat dihubungkan seri dengan belitan rotor untuk
mengontrol torsi start dan kecepatan selama pengasutan. Penambahan tahanan
eksternal pada rangkaian rotor belitan menghasilkan torsi yang lebih besar dengan arus
pengasutan yang lebih kecil dibanding rotor sangkar. Konstruksi motor induksi tiga fasa
rotor belitan ditunjukkan pada Gambar 2.4.
Gambar 2.4 (a) tipikal rotor belitan, (b) motor induksi rotor belitan
2.3 Medan Putar
Perputaran rotor pada motor arus bolak – balik terjadi akibat adanya medan
putar ( fluks yang berputar ) yang memotong rotor. Medan putar ini terjadi apabila
kumparan stator dihubungkan dengan suplai fasa banyak, umumnya tiga fasa. Pada saat
terminal tiga fasa motor induksi dihubungkan dengan suplai tiga fasa maka arus bolak –
balik tiga fasa ia, ib, ic yang terpisah sebesar 1200 derajat satu sama lain akan mengalir
pada kumparan stator. Arus – arus ini akan menghasilkan gaya gerak magnet yang
Untuk melihat bagaimana medan putar dihasilkan, maka dapat diambil contoh
sebuah motor induksi tiga fasa yang dihubungkan dengan sumber tiga fasa sehingga
pada stator mengalir arus tiga fasa yang kemudian menghasilkan medan putar, seperti
berikut ini :
Pada kondisi t0 dan t4 :
ia = Imax Fa = Fmax
ib = Fb = Fmax
ic = Fc = Fmax
Pada kondisi t1 :
ia = 0 Fa = 0
ib = Fb = Fmax
ic = Fc = Fmax
Pada kondisi t2 :
ia = - Imax Fa = - Fmax
ib = Fb = Fmax
Pada kondisi t3 :
ia = 0 Fa = 0
ib = Fb = Fmax
ic = Fc = Fmax
Gambar 2.5 (a) kondisi t0 dan t4, (b) kondisi t1, (c) kondisi t2, (d) kondisi t3.
Kecepatan putaran medan putar stator dinamakan kecepatan sinkron, medan
putar stator kemudian memotong konduktor pada batang rotor sehingga pada
konduktor rotor timbul tegangan induksi yang mengakibatkan rotor ikut berputar
setelah melalui beberapa proses. Arah putaran rotor motor induksi searah dengan arah
putaran medan putar, namun kecepatan putaran rotor lebih rendah dari kecepatan
sinkronnya. Perbedaan kecepatan putaran ini dinamakan slip motor induksi.
2.4 Slip
Kecepatan putaran rotor motor induksi harus lebih lambat dari kecepatan
sinkronnya supaya konduktor pada rotor selalu dipotong oleh medan putar, sehingga
pada rotor timbul tegangan induksi yang akan menghasilkan arus induksi pada rotor.
Arus induksi ini kemudian berinteraksi dengan fluks yang dihasilkan stator sehingga
menghasilkan torsi. Selisih antara kecepatan putaran rotor dengan kecepatan
(2.2) sinkronnya disebut slip (s). Pada umumnya slip dinyatakan dalam persen dari kecepatan
sinkron,
Dimana :
Ns = kecepatan sinkron
Nr = kecepatan putaran rotor
2.5 Prinsip Kerja Motor Induksi Tiga Fasa
Motor induksi adalah peralatan pengubah energi listrik ke bentuk energi
mekanik. Listrik yang diubah merupakan listrik tiga fasa. Dalam motor induksi, tidak ada
hubungan listrik ke rotor, arus rotor merupakan arus induksi. Tetapi ada kondisi yang
sama seperti motor dc, dimana pada rotor mengalir arus. Arus ini berada dalam medan
magnetik sehingga akan terjadi gaya (F) pada rotor yang akan menggerakkan rotor
dalam arah tegak lurus medan.
Untuk memperjelas prinsip kerja motor induksi tiga fasa, maka dapat dijabarkan
dalam langkah – langkah berikut:
1. Apabila terminal stator motor induksi tiga fasa dihubungkan dengan sumber tegangan
tiga fasa, maka pada kumparan stator mengalir arus tiga fasa.
2. Arus pada tiap fasa mengahasilkan fluksi bolak – balik yang berubah – ubah.
3. Penjumlahan atau interaksi ketiga fluksi bolak – balik tersebut menghasilkan medan
putar yang berputar dengan kecepatan putar sinkron Ns. Besarnya nilai Ns ditentukan
oleh jumlah kutub p dan frekuensi stator f yang dirumuskan dengan : ( rpm )
(2.3)
(2.4)
f = frekuensi sumber P = jumlah kutub
4. Fluksi yang berputar tersebut akan memotong konduktor pada batang rotor. Akibatnya
pada kumparan rotor timbul tegangan induksi (ggl) sebesar E2 yang besarnya adalah :
( Volt )
dimana :
E2 = Tegangan induksi pada rotor saat rotor dalam keadaan diam (Volt)
N2 = Jumlah lilitan kumparan rotor
Фm = Fluksi maksimum(Wb)
5. Karena kumparan rotor merupakan rangkaian tertutup, maka ggl tersebut akan
menghasilkan arus I2
6. Adanya arus I2 di dalam medan magnet akan menimbulkan gaya F pada rotor.
7. Bila kopel mula yang dihasilkan oleh gaya F cukup besar untuk memikul kopel beban, rotor akan berputar searah medan putar stator
8. Perputaran rotor akan semakin meningkat hingga mendekati kecepatan sinkron.
Perbedaan kecepatan medan stator (Ns) dan kecepatan rotor (Nr) disebut slip (s) dan
dinyatakan seperti pada persamaan (2.1).
9. Pada saat rotor dalam keadaan berputar, besarnya tegangan yang terinduksi pada
kumparan rotor akan bervariasi tergantung besarnya slip. Tegangan induksi ini
dinyatakan dengan E2s yang besarnya
( Volt )
1
V Rc Xm
E
11 I m I 0 I
+
-
-+
cI
1 jX 1 R '' 2 If2=s.f = frekuensi rotor (frekuensi rotor dalam keadaan berputar)
10. Bila Ns = Nr, tegangan tidak akan terinduksi dan arus tidak akan mengalir pada
kumparan rotor, karenanya tidak dihasilkan kopel. Kopel ditimbulkan jika Nr <
Ns. Apabila Nr > Ns maka mesin induksi akan beroperasi sebagai generator induksi yang
akan menghasilkan energi listrik.
2.6 Rangkaian Ekivalen Motor Induksi Tiga Fasa
Sebuah motor induksi identik dengan sebuah transformator. Oleh sebab itu,
rangkaian ekivalen motor induksi mirip dengan rangkaian ekivalen transformator.
Perbedaannya hanyalah bahwa kumparan rotor dari motor induksi berputar, yang
berfungsi untuk menghasilkan daya mekanik. Rangkaian ekivalen motor induksi
dihasilkan dengan cara yang sama sebagaimana halnya pada transformator. Semua
parameter-parameter rangkaian ekivalen yang akan dijelaskan berikut mempunyai
nilai-nilai perfasa hal ini dimaksudkan untuk mempermudah analisis.
2.6.1 Rangkaian Ekivalen Stator
Putaran gelombang fluks pada celah udara membangkitkan ggl lawan tiga
fasa yang seimbang pada belitan stator. Rangkaian ekivalen stator, seperti gambar
2.6 berikut ini.
(2.5) Besarnya tegangan terminal stator manjadi penjumlahan ggl lawan . )
dan jatuh tegangan pada impedansi bocor stator , dapat dinyatakan sebagai
berikut :
dimana:
= tegangan terminal stator (Volt)
= ggl lawan yang dihasilkan oleh fluks celah udara resultan (Volt)
= arus stator (Ampere)
= tahanan efektif stator (Ohm)
= reaktansi bocor stator (Ohm)
Sebagaimana halnya pada transformator, arus stator terdiri dari dua
komponen. Komponen pertama adalah komponen beban yang akan menghasilkan
fluks yang akan melawan fluks yang dihasilkan oleh arus rotor. Komponen lainnya yaitu
, arus ini terbagi lagi menjadi dua komponen yaitu komponen rugi-rugi inti yang
sefasa dengan komponen rugi-rugi inti dan komponen magnetisasi yang
menghasilkan fluks magnetik pada inti dan celah udara yang tertinggal dari .
2.6.2 Rangkaian Ekivalen Rotor
Pada saat rotor dalam kondisi diam yaitu kondisi sesaat rotor sebelum bergerak,
kecepatan relative diantara putaran medan magnet dengan konductor rotor adalah
kecepatan sinkron Ns. Pada kondisi ini tegangan induksi yang dibangkitkan pada
rangkaian rotor adalah . karena seluruh belitan rotor dihubung-singkat maka akan
mengalir arus akibat ggl induksi pada rotor. Sehingga dapat dituliskan
(2.6)
(2.7) (2.8)
(2.9)
Dari bentuk persamaan di atas, rangkaian ekivalen rotor perfasa dalam keadaan diam
digambarkan seperti gambar berikut.
2
I
2
R
2
E jX2
Gambar 2.7. Rangkaian ekivalen per-fasa rotor motor induksi keadaan diam dimana :
= arus rotor dalam keadaan diam (Ampere)
= ggl induksi rotor dalam keadaan diam (Volt)
= resistansi rotor (Ohm)
= reaktansi rotor dalam keadaan diam (Ohm)
Setelah rotor berputar maka ggl rotor perfasa dan reaktansi rotor perfasa
masing-masing dipengaruhi oleh frekuensi, nilai reaktansi rotor dapat dijelaskan dari
persamaan di bawah ini dimana nilainya tergantung dari induktansi dan frekuensi rotor.
=ωrL2= 2πf2L2
Dengan f2 = sf,
Maka:
= 2πsfL2
= s(2πfL2)
(2.10)
(2.11)
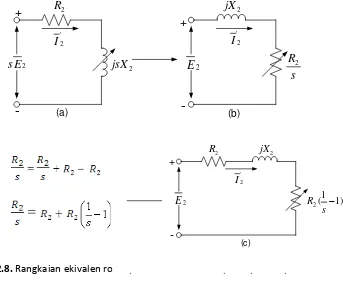
(2.12) Dengan demikian nilai dan X2 bergantung terhadap slip s, sementara nilai resistansi
rotor perfasa tidak dipengaruhi oleh frekuensi sehingga tidak tergantung terhadap
nilai slip s. Sehingga dari persamaan di atas dapat dibuat persamaannya menjadi :
Dengan membagi pembilang dan penyebut pada persamaan di atas dengan s, maka nilai
arus rotor diperoleh seperti berikut :
Nilai dari
sekarang lebih besar dari
R2 dikarenakan s memiliki nilai dalam bentukpecahan. Untuk itu, dapat dipecah menjadi sebuah bagian yang bernilai konstan R2
dan sebuah bagian yang variabel ( ), yaitu:
=
+
–=
−
1
1
s
Bagian pertama R2 merupakan tahanan rotor/fasa dan mewakilkan rugi tembaga. Bagian
kedua R2
−
1
1
s
merupakan sebuah beban tahanan-variabel. Daya yang dikirim kebeban ini mewakilkan daya mekanik keseluruhan yang dibangun di rotor. Untuk itu
beban mekanik pada motor dapat digantikan dengan sebuah beban tahanan-variabel
dengan nilai R2
−
1
1
(2.13)
(2.14) RL= R2
−
1
1
s
Dengan demikian persamaan (2.11) dapat dirubah menjadi :
−
1
1
2s
R
Dari persamaan (2.10), (2.11), (2.12) dan (2.14) di atas maka dapat digambarkan
rangkaian ekivalen rotor seperti gambar 2.8. di bawah ini.
2 R 2 E s s R2 2 jsX 2 jX ' 2 I ' 2 I (a) (b) 2
E
+ +-
-Gambar 2.8. Rangkaian ekivalen rotor per-fasa keadaan berputar pada slip = s
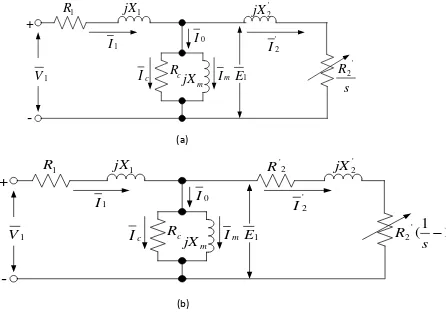
2.6.3 Rangkaian Ekivalen Lengkap
Dari penjelasan rangkaian ekivalen pada stator dan rotor di atas, maka dapat
dibuat rangkaian ekivalen perfasa motor induksi tiga fasa pada masing – masing fasa,
seperti halnya seperti rangkaian ekivalen sebuah transformator.
[image:30.595.157.500.320.609.2]-1
V Rc
E
11 I m I + -c
I
E
22 jX
'' 2
I I'2
1
R jX1
m jX 0 I s R2
Gambar 2.9. Rangkaian Ekivalen Motor Induksi Tiga Fasa
Untuk mempermudah perhitungan maka rangkaian ekivalen pada gambar di atas dapat
dilihat dari sisi stator, seperti gambar rangkaian ekivalen berikut.
c
R
mI
cI
0I
1I
1V
E
1s
R
2'1
R
jX
1 '2
jX
mjX
' 2I
+
-cR
I
mc
I
0I
1I
)
1
1
(
' 2−
s
R
2 'R
1V
E
11
R
' 2I
' 2jX
1jX
mjX
+
-Gambar 2.10. Rangkaian ekivalen per-fasa motor induksi dengan bagian rangkaian rotor dinyatakan terhadap sisi stator
(a) dengan tahanan konstan
s
R
2'(a)
[image:31.595.120.566.324.639.2](b) dengan tahanan variabel 2'(1−1)
s R
Dibawah kondisi kerja normal pada tegangan dan frekuensi konstan, rugi inti
pada motor induksi biasanya juga konstan. Dalam pandangan pada kenyataan ini,
tahanan rugi inti Rc yang mewakili rugi inti motor, dapat dihilangkan dari rangkaian
ekivalen motor induksi. Akan tetapi, untuk menentukan daya poros atau torsi poros, rugi
inti yang konstan harus diikut-sertakan dalam pertimbangan, bersama dengan gesekan,
rugi-rugi beban buta (stray-load losses) dan angin. Dengan penyederhanaan ini, maka
dapat digambar rangkaian ekivalen baru (gambar 2.11) seperti berikut ini.
0
I
1I
)
1
1
(
' 2−
s
R
2 'R
1V
E
11
R
jX
1jX
2'm
jX
' 2I
+
-Gambar 2.11. Rangkaian ekivalen per-fasa motor induksi tanpa rugi inti
2.7 Analisis Rangkaian ekivalen
Semua karakteristik kinerja motor induksi tiga fasa dapat ditentukan dari
rangkaian ekivalennya. Dalam menganalisis rangkaian ekivalen sebuah transformator,
bagian parallel dari rangkaian yang terdiri dari Re dan XØ dapat diabaikan atau
menggeser bagian parallel tersebut ke arah terminal primer. Namun cara ini tidak
diijinkan dalam menganalisis rangkaian ekivalen motor induksi. Hal ini dikarenakan
kenyataan bahwa arus penguatan pada transformator berkisar antara 2% sampai 6%
dari arus beban penuh dan juga reaktansi bocor primer per unitnya juga sangat kecil.
(2.15)
(2.16)
(2.17) arus beban penuh dan juga reaktansi bocor primer per unit cukup besar. Oleh sebab itu,
apabila komponen parallel rangkaian ekivalen motor induksi diabaikan maka akan
terdapat kesalahan yang besar dalam hal perhitungan daya dan torsi motor induksi.
m
I
1
I
1
V
E
1s
R
2'1
R
jX
1 '2
jX
mjX
'' 2I
+
-Gambar 2.12. Rangkaian ekivalen motor induksi
Dari gambar rangkaian ekivalen diatas, arus stator dan rotor juga impedansi dapat
ditentukan seperti berikut.
+
=
Dari nilai arus stator dan rotor di atas maka daya celah udara dan torsi internal
per fasa dapat ditentukan. Daya celah udara adalah daya yang ditransfer dari stator ke
rotor sepanjang celah udara. Daya celah udara Pg dapat dituliskan seperti berikut.
(2.18)
(2.19)
(2.20)
(2.21)
Pg = rugi ohmic rotor + daya mekanik internal yang dibangkitkan di rotor (Pm)
Pg = s Pg + (1-s) Pg
Sedangkan torsi internal yang dibangkitkan per fasa adalah :
=
2.8 Penentuan Parameter Rangkaian Ekivalen Motor Induksi
Parameter rangkaian ekivalen motor induksi dapat ditentukan dari percobaan
beban nol, percobaan rotor tertahan (blocked rotor), dan percobaan tahanan dc belitan
stator. Salah satu tujuan penentuan parameter motor induksi adalah untuk menguji
kebenaran data – data yang ada pada name plate motor induksi tersebut.
(a). Percobaan beban nol. Tujuan percobaan beban nol adalah untuk memperoleh nilai rugi inti, rugi rotasional dan menentukan parameter Xm. Pada
percobaan ini, motor induksi dioperasikan memeikul beban nol pada rating tegangan
dan frekuensinya. Besar tegangan yang disuplai pada belitan stator per fasa adalah Vn1,
arus input In1, dan daya input Pn1. Nilai ini dapat dilihat pada alat ukur pada saat
(2.22)
(2.23)
(2.24) Kecepatan rotor motor induksi pada saat memikul beban nol mendekati atau
hampir sama besar dengan kecepatan sinkronnya. Oleh sebab itu, slip (snl) motor induksi
pada saat beban nol adalah sangat kecil atau mendekati nol, sehingga nilai sangat
besar bila dibandingkan dengan XØ . pada keadaan ini arus yang mengalir ke rotor sangat
kecil. Dari pernyataan di atas, rangkaian ekivalen motor induksi pada saat memikul
beban nol adalah sebagai berikut.
V n
m jX
I n
+
1 jX 1
R
Gambar 2.13 rangkaian ekivalen motor induksi beban nol
Dari gambar 2.12 di atas, reaktansi beban nol Xnl dilihat dari terminal stator adalah :
Xnl = X1 + Xm
Impedansi stator beban nol dapat ditentukan dari pembacaan alat ukur pada saat
percabaan beban nol.
Dan tahanan stator beban nol adalah :
(2.25)
(2.26) Sedangkan rugi – rugi putaran PR biasanya dapat dianggap konstan dan dapat ditentukan
dari persamaan berikut :
m adalah jumlah fasa stator dan r1 adalah tahanan stator per fasanya.
(b). Percobaan rotor tertahan. Tujuan percobaan rotor tertahan adalah untuk menentukan nilai impedansi bocor. Pada percobaan ini poros rotor dipaksa untuk tidak
berputar dimana terminal stator terhubung sumber tegangan seimbang sesuai
ratingnya. Nilai tegangan per fasa Vbr, arus masukan Ibr, dan daya masukan Pbr didapat
dengan melihat alat ukur pada saat melakukan percobaan rotor tertahan. Rangkaian
ekivalen motor induksi pada percobaan rotor tertahan adalah sebagai berikut :
br
I
br
V
r
21
R
jX
1jX
2m
jX
+
Gambar 2.14 rangkaian ekivalen motor induksi rotor tertahan
Dari pembacaan alat ukur pada saat percobaan, dapat ditentukan parameter motor
induksi sebagai berikut :
(2.28)
(2.29)
(2.30) Dan tahanan rotor tertahan,
Reaktansi rotor tertahan,
(c). Percobaan DC. Percobaan dc dilakukan untuk memperoleh nilai R1 yaitu
dengan menghubungkan sumber tegangan dc (Vdc) pada dua terminal input kemudian
arus dc nya diukur. Pada kondisi ini arus tidak mengali pada rotor karena tidak ada arus
yang terinduksi pada rotor.
Kemudian dari pembacaan alat ukur selama melakukan percobaan dapat
diperoleh:
(2.31) 2.9 Aliran Daya dan Efisiensi Motor Induksi
2.9.1 Aliran Daya
Pada motor induksi, tidak ada sumber listrik yang langsung terhubung ke rotor,
sehingga daya yang melewati celah udara sama dengan daya yang diinputkan ke rotor.
Daya total yang dimasukkan pada kumparan stator (Pin) dirumuskan dengan
P
in=
3
V
1I
1cos
θ
( Watt )dimana :
V1 = tegangan sumber perfasa (Volt)
I1 = arus masukan perfasa (Ampere)
θ = sudut phasa antara arus masukan dengan tegangan sumber.
Daya listrik yang diinputkan pada terminal stator kemudian diubah menjadi daya
mekanik pada poros rotor. Namun selama proses konversi energy listrik menjadi energy
gerak terdapat berbagai rugi – rugi yang terjadi pada belitan, inti magnet, dan lain – lain.
Rugi – rugi tersebut antara lain :
1. Rugi – rugi tetap, terdiri dari :
a) Rugi inti stator, (watt)
b) Rugi gesek dan angin.
2. Rugi – rugi variable, terdiri dari :
a) Rugi tembaga stator (Pts), (watt)
(2.32)
(2.33) Apabila daya yang disuplai pada terminal stator dikurangi dengan rugi – rugi tembaga
dan rugi – rugi inti, maka akan diperoleh besar daya listrik yang diubah menjadi daya
mekanik pada poros rotor.
Pmek = Pin – Pi – Pts – Ptr (watt)
Gambar berikut menunjukkan aliran daya pada motor induksi tiga fasa.
Gambar 2.16 Aliran daya motor induksi
2.9.2 Efisiensi
Efisiensi motor induksi adalah ukuran keefektifan motor induksi untuk
mengubah energi listrik menjadi energi mekanik yang dinyatakan sebagai perbandingan
antara daya keluaran dan daya masukan. yang dapat dirumuskan seperti berikut :
in loses in loses in in out
p
p
p
p
p
p
p
−
=
−
=
=
1
η
Bila dinyatakan dalam persen, maka :
Dari persamaan terlihat bahwa efisiensi motor bergantung pada besar rugi-ruginya.
Rugi-rugi pada persamaan tersebut adalah penjumlahan keseluruhan komponen
rugi-rugi yang dibahas pada sub bab sebelumnya, yaitu :
Ploses = Pts + Ptr + Pi + Pa&g
Dimana :
Pts = Rugi tembaga stator
Ptr = Rugi tembaga rotor
Pi = Rugi inti stator
Pa&g = Rugi gesek dan angin
Pada motor induksi pengukuran efisiensi motor induksi ini dapat dilakukan dengan
beberapa cara seperti:
- Mengukur daya listrik masukan dan daya mekanik keluaran.
BAB III
TEGANGAN TIDAK SEIMBANG DAN HARMONISA
3.1 Umum
Tegangan tiga fasa tidak seimbang terjadi ketika besar dan pergeseran fasa
dari tiga komponen tegangan tiga fasa tidak sama besar dan tidak terpisah sebesar
120
0satu sama lain. Sedangkan harmonisa adalah gelombang – gelombang
sinusoidal dengan frekuensi sebesar kelipatan bilangan bulat dari frekuensi dasar.
Pada sistem tiga fasa, tegangan yang dibangkitkan merupakan tegangan
sinusoidal dan seimbang, namun pada ujung saluran distribusi tegangan ini
menjadi tidak seimbang dan terdistorsi harmonisa akibat beberapa alasan.
Pada sistem tenaga listrik, harmonisa yang ditinjau merupakan harmonisa
arus dan harmonisa tegangan pada frekuensi dasar 50 Hz ( standar IEC ) atau pada
frekuensi dasar 60 Hz ( standar ANSI ). Sistem tenaga listrik di Indonesia
memakai frekuensi dasar 50 Hz sesuai dengan standar IEC.
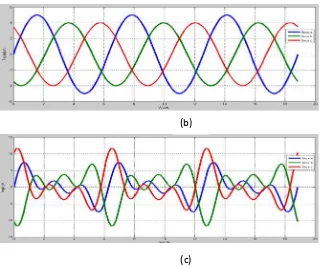
Gambar 3.1
(a) gelombang tegangan tiga seimbang
(b) gelombang tegangan tiga seimbang tidak seimbang
(c) gelombang tegangan tiga seimbang fasa tidak seimbang dan terdistorsi
harmonisa
3.2 Komponen Simetris
Pada tahun 1913, metode komponen simetris telah dikembangkan oleh
Charles L. Fortescue dari Westinghouse saat menyelidiki pengoperasian motor
induksi pada kondisi suplai tidak seimbang. Kemudian pada konvensi tahunan ke
– 34 AIEE tanggal 28 juni 1918 di antlantic City, Ia menyajikan makalah yang
berjudul “Method of Symmetrical Co-ordinates Applied to the Solution of
Polyphase Networks.” Yang kemudian dipublikasikan oleh AIEE Transactions,
Volume 37, Part II, halaman 1027 – 1140. Metode komponen simetris digunakan
untuk memahami dan menganalisis operasi sistem tenaga listrik pada kondisi
(b)tidak seimbang. Berbagai jenis ketidakseimbangan pada sistem tenaga listrik
disebabkan oleh gangguan antara phasa dan/atau ke bumi ( fasa ke fasa, dua fasa
ke tanah, satu fasa ke tanah ), fasa terbuka, impedansi tidak seimbang dan
kombinasinya.
Metode komponen simetris digunakan untuk menguraikan suatu sistem
tidak seimbang yang terdiri atas n buah fasor yang berhubungan menjadi n buah
sistem fasor yang seimbang. Pada sistem tiga fasa, tiga fasor tidak seimbang dapat
diuraikan menjadi tiga sistem fasor yang seimbang. Ketiga komponen seimbang
pada komponen simetris adalah :
1.
Komponen urutan positif.
2.
Komponen urutan negatif.
3.
Komponen urutan nol.
Ketiga himpunan komponen semetris dinyatakan dengan subskrip tambahan 1
untuk komponen urutan positif, 2 untuk komponen urutan negatif, dan 0 untuk
komponen urutan nol. Komponen urutan positif dari V
a, V
b, dan V
cadalah V
a1,V
b1,dan V
c1. Demikian pula untuk komponen urutan negative adalah V
a2,V
b2,dan
V
c2. Sedangkan komponen urutan nol adalah V
a0,V
b0,dan V
c0.
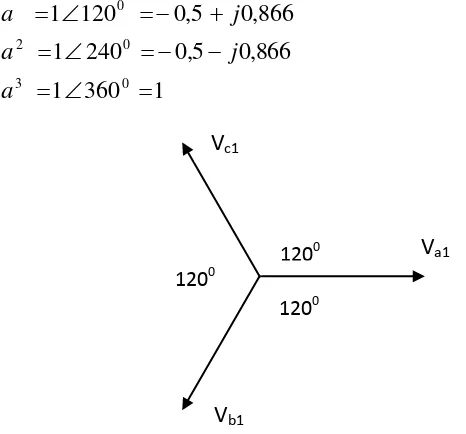
3.2.1 Komponen urutan positif
Komponen urutan ini terdiri dari tiga fasor yang sama besar, terpisah 120
0satu sama lain dan mempunyai urutan fasa yang sama dengan fasor aslinya.
Gambar dibawah menunjukkan fasor komponen urutan positif dengan urutan fasa
(3.1)
(3.2)
Pada pergeseran sudut, akan lebih mudah menggunakan unit fasor dengan
pergeseran sudut 120
0dalam arah yang berlawanan dengan arah jarum jam. Hal
ini dinamakan sebagai operator fortescue,
[image:44.595.151.384.181.398.2]1 360 1 866 , 0 5 , 0 240 1 866 , 0 5 , 0 120 1 0 3 0 2 0 = ∠ = − − = ∠ = + − = ∠ = a j a j a
Gambar 3.2. Fasor tegangan urutan positif
Fasor tegangan urutan positif memiliki pola yang sama dengan fasor arus
urutan positif, oleh karena itu pengaturan urutan positif dapat diperiksa
kebenarannya sebagai berikut :
1 1 1 1 1 2 1 1 2 1 1 1 1 1 I a I V a V I a I V a V I I V V c c b b a a = = = = = =
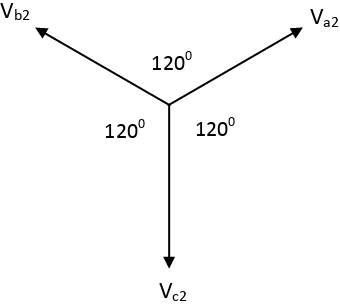
3.2.2 komponen urutan negatif
Komponen urutan ini terdiri dari tiga fasor yang sama besar, terpisah 120
0satu sama lain dan mempunyai urutan fasa yang berlawanan dengan fasor aslinya.
(3.3)
sistem tenaga listrik abc, maka urutan fasa komponen urutan negatif adalah acb.
[image:45.595.213.383.138.292.2]Arah putaran fasor berlawanan dengan arah jarum jam.
Gambar 3.3. Fasor tegangan urutan negatif
Seperti halnya pada urutan positif, fasor tegangan urutan negatif memiliki
pola yang sama dengan fasor arus urutan negatif, oleh karena itu pengaturan
urutan negatif dapat diperiksa kebenarannya sebagai berikut :
2 2 2 2 2 2 2 2 2 2 2 2 2 2 I a I V a V I a I V a V I I V V c c b b a a = = = = = =
3.2.3 Komponen urutan nol
Komponen urutan ini terdiri dari tiga fasor yang sama besarnya dan
dengan pergeseran fasa nol antara fasor yang satu dengan yang lain. Gambar di
bawah ini menunjukkan fasor komponen urutan nol dengan urutan fasa sistem
tenaga listrik abc.
Gambar 3.4. Fasor tegangan urutan nol
1200 1200 1200V
a2V
b2V
c2(3.4)
Pengaturan tegangan dan arus urutan nol dapat diperiksa kebenarannya
sebagai berikut :
V
a0= V
b0= V
c0= V
0I
a0= I
b0= I
c0= I
0Karena setiap fasor tak seimbang, yang asli adalah jumlah komponen, fasor asli
yang dinyatakan dalam suku – suku komponennya adalah
V
a= V
a1+ V
a2+ V
a0V
b= V
b1+ V
b2+ V
b0= a
2V
a1+ aV
a2+ V
a0V
c= V
c1+ V
c2+ V
c0= aV
a1+ a
2V
a2+ V
a0dan
I
a= I
a1+ I
a2+ I
a0I
b= I
b1+ I
b2+ I
b0= a
2I
a1+ aI
a2+ I
a0I
c= I
c1+ I
c2+ I
c0= aI
a1+ a
2I
a2+ I
a0Atau dalam bentuk matriks
(3.5)
(3.6)
(3.7)
Untuk memudahkan penghitungan, kita misalkan :
= 2 2 1 1 1 1 1 a a a a A
Apabila matriks A diinverskan, diperoleh :
= − a a a a A 2 2 1 1 1 1 1 1 3 1
Maka kita peroleh :
= = c b a a a a c b a a a a I I I a a a a I I I dan V V V a a a a V V V 2 2 2 1 0 2 2 2 1 0 1 1 1 1 1 3 1 1 1 1 1 1 3 1
Persamaan di atas menunjukkan bagaimana menguraikan tiga fasor tidak simetris
menjadi komponen simetrisnya. Kita dapat menulis masing – masing persamaan
di atas dalam bentuk biasa, kita peroleh :
(
)
(
)
(
a b c)
(3.8)
(3.9)
(3.10)
(
)
(
)
(
a b c)
a c b a a c b a a
aI
I
a
I
I
I
a
aI
I
I
I
I
I
I
+
+
=
+
+
=
+
+
=
2 2 2 1 03
1
3
1
3
1
Persamaan di atas menunjukkan bahwa tidak akan ada komponen urutan
nol jika jumlah fasor tak seimbang itu sama dengan nol.
3.3 Defenisi Tegangan Tidak Seimbang
Tiga defenisi umum tegangan tidak seimbang dapat ditemukan dalam standard.
Defenisi yang pertama adalah rasio tegangan tidak seimbang per fasa ( PVUR )
yang didefenisikan oleh IEEE sebagai berikut :
V
a, V
b, V
cmerupakan tegangan fasa, dimana :
Defenisi yang kedua adalah rasio tegangan tidak seimbang fasa ke fasa ( LVUR )
yang didefenisikan oleh NEMA ( National Electrical Manufactures Association )
(3.11)
(3.12)
(3.13)
V
ab, V
bc, V
camerupakan tegangan fasa ke fasa, dimana :
Dan defenisi yang ketiga adalah faktor ketidakseimbangan tegangan ( VUF ) yang
didefenisikan oleh IEC ( International Electrotechnical Commision ) sebagai
berikut :
3.4
Deret fourier
Deret fourier untuk suatu fungsi periodic x(t) dinyatakan sebagai berikut :
Atau ekivalen dengan,
Dimana a
0adalah komponen dc (searah) dari bentuk gelombang atau nilai rata –
rata fungsi x(t), sedangkan a
ndan b
nadalah koefisien fourier. Nilai n adalah orde
harmonisa. Pada persamaan di atas, komponen dc a
0dapat ditentukan dengan
mengintegralkan kedua ruas persamaan dengan batas
sehingga
diperoleh :
Karena nilai rata – rata sebuah fungsi sinus dan cosinus sama dengan nol, maka
Koefisien a
ndapat ditentukan dengan cara mengalikan persamaan di atas dengan
dan diintegralkan dengan batas
sehinnga diperoleh :
Karena nilai rata – rata sebuah fungsi sinus dan cosinus sama dengan nol, maka
persamaan di atas menjadi :
Koefisien b
ndapat ditentukan dengan cara mengalikan persamaan di atas dengan
Karena nilai rata – rata sebuah fungsi sinus dan cosinus sama dengan nol, maka
persamaan di atas menjadi :
3.5 Jenis – jenis harmonisa
Berdasarkan urutan ordenya, harmonisa dibagi dalam dua jenis yaitu
harmonisa ganjil dan harmonisa genap. Harmonisa ganjil adalah hermonisa ke 3,
5, 7, 9, 11, dan seterusnya. Sedangkan harmonisa genap adalah harmonisa ke 2, 4,
6, 8, 10, dan seterusnya. Harmonisa 0 merupakan komponen dc(searah) dari
bentuk golombang, sedangkan harmonisa 1 merupakan komponen frekuensi dasar
dari gelombang periodic. Berdasarkan urutan fasanya, harmonisa dibagi tiga jenis
yaitu :
1.
Harmonisa urutan positif, harmonisa ini dari tiga fasor yang sama besar dan
harmonisa dasarnya adalah abc, maka harmonisa ini juga memiliki urutan fasa
abc.
2.
Harmonisa urutan negatif, harmonisa ini dari tiga fasor yang sama besar dan
memiliki urutan fasa yang berlawanan dengan harmonisa dasarnya. Apabila
urutan fasa harmonisa dasarnya adalah abc, maka harmonisa ini memiliki urutan
fasa acb.
3.
Harmonisa urutan nol, harmonisa ini terdiri dari tiga fasor yang sama besar dan
sefasa ( pergeseran sudut satu sama lain sebesar 0
0).
Pada sistem tenaga listrik tiga fasa seimbang, besar arus dan tegangan
pada setiap fasa adalah sama dan terpisah 120
0satu sama lain. Apabila sistem
tenaga listrik memiliki urutan fasa abc, maka dalam keadaan seimbang besaran
sesaat tegangan harmonisa pertama atau fundamental adalah :
v
a1= V
asin t
v
b1= V
bsin ( t – 120
0)
v
c1= V
csin ( t – 240
0)
besaran sesaat tegangan harmonisa kedua adalah :
v
a2= V
asin 2 t
v
b2= V
bsin 2 ( t – 120
0) = V
bsin ( 2 t – 240
0)
v
c2= V
csin 2 ( t – 240
0) = V
csin ( 2 t – 480
0) = V
csin ( 2 t – 120
0)
besaran sesaat tegangan harmonisa ketiga adalah :
v
b3= V
bsin 3 ( t – 120
0) = V
bsin ( 3 t – 360
0) = V
bsin 3 t
v
c3= V
csin 3 ( t – 240
0) = V
csin ( 3 t – 720
0) = V
csin 3 t
besaran sesaat tegangan harmonisa keempat adalah :
v
a4= V
asin 4 t
v
b4= V
bsin 4 ( t – 120
0) = V
bsin ( 4 t – 480
0) = V
bsin ( 4 t – 120
0)
v
c4= V
csin 4 ( t – 240
0) = V
csin ( 4 t – 960
0) = V
csin ( 4 t – 240
0)
besaran sesaat tegangan harmonisa kelima adalah :
v
a5= V
asin 5 t
v
b5= V
bsin 5 ( t – 120
0) = V
bsin ( 5 t – 600
0) = V
bsin ( 5 t – 240
0)
v
c5= V
csin 5 ( t – 240
0) = V
csin ( 5 t – 1200
0) = V
csin ( 5 t – 120
0)
besaran sesaat tegangan harmonisa keenam adalah :
v
a6= V
asin 6 t
v
b6= V
bsin 6 ( t – 120
0) = V
bsin ( 6 t – 720
0) = V
bsin 6 t
v
c6= V
csin 6 ( t – 240
0) = V
csin ( 6 t – 1440
0) = V
csin 6 t
besaran sesaat tegangan harmonisa ketujuh adalah :
v
a7= V
asin 7 t
v
b7= V
bsin 7 ( t – 120
0) = V
bsin ( 7 t – 840
0) = V
bsin ( 7 t – 120
0)
dari persamaan di atas diperoleh :
1.
Harmonisa 1, 4, 7 merupakan harmonisa urutan positif.
2.
Harmonisa 2, 5 merupakan harmonisa urutan negatif.
3.
Harmonisa 3, 6 merupakan harmonisa urutan nol.
Tabel hubungan komponen simetris dengan orde harmonisa
Komponen
simetris
Urutan positif
Urutan negatif
Urutan nol
Orde harmonisa
1
2
3
4
5
6
7
8
9
10
11
12
…
…
…
3.6 Analisis operasi motor induksi tiga fasa disuplai tegangan tidak seimbang
a.
Model motor induksi
Jika tegangan yang disuplai ke terminal stator motor induksi tiga fasa merupakan
tegangan tidak seimbang, maka kinerja motor induksi akan berubah. Pendekatan
secara langsung untuk masalah ini adalah dengan menganalisis tegangan tidak
seimbang menggunakan komponen simetris dengan tegangan seimbang urutan
positif dan tegangan seimbang urutan negative. Kinerja motor induksi pada saat
disuplai tegangan seimbang urutan positif akan sama dengan kinerja motor
induksi pada saat disuplai tegangan seimbang, sedangkan kinerja motor induksi
pada saat disuplai tegangan seimbang urutan negative akan berlawanan dengan
kinerja motor induksi pada saat disuplai tegangan seimbang, sehingga slip motor
induksi pada saat disuplai tegangan seimbang urutan positif dan negative akan
berbeda.
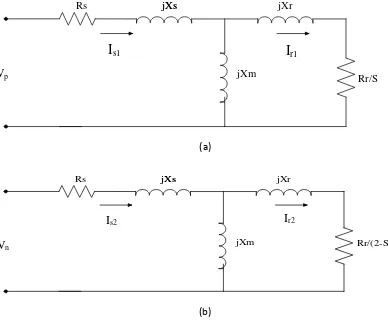
Slip motor induksi pada saat disuplai tegangan urutan positif adalah :
Rs jXsjXs
Rr/S jXm
jXr
V1
Rs jXsjXs
Rr/(2-S) jXm
jXr
V1
Gambar 3.5 (a) Rangkaian ekivalen motor induksi tiga fasa urutan positif,
(b) Rangkaian ekivalen motor induksi tiga fasa urutan negative
Impedansi rangkaian ekivalen motor induksi disuplai tegangan urutan positif
adalah :
Impedansi rangkaian ekivalen motor induksi disuplai tegangan urutan negatif
adalah :
I
s2I
r2V
n(b)
V
pI
s1I
r1 [image:57.595.133.521.87.408.2](3.21)
(3.22)
(3.23)
(3.24)
b.
Arus stator dan rotor
Jika tegangan fasa urutan disuplai pada rangkaian ekivalen urutan pada gambar
diatas, maka arus urutan dapat dihitung.
Arus stator dan rotor urutan positif adalah :
Dan
Arus stator dan rotor urutan negatif adalah :
dan
Untuk menghitung rugi – rugi pada stator dan rotor maka diperlukan arus stator
dan rotor per fasa. arus per fasa dapat ditentukan dengan melakukan transformasi
kembali. Transformasi arus stator dapat dilakukan dengan menggunakan matriks
(3.25)
(3.26)
(3.27)
Dengan cara yang sama, dapat ditentukan dengan transformasi seperti berikut :
Pada persamaan di atas untuk motor induksi yang terhubung delta atau
ungrounded wye tidak terdapat arus urutan nol ( I
s0= I
r0= 0 ).
c.
Rugi tembaga, daya input, daya output, faktor daya, daya ouput, torsi
output dan efisiensi motor induksi tiga fasa disuplai tegangan tidak
seimbang.
Untuk mempermudah penghitungan, terdapat beberapa asumsi sebagai berikut :
1.
Semua elemen dianggap konstan.
2.
Rugi inti diabaikan.
Rugi tembaga stator pada motor adalah
Rugi tembaga rotor pada motor adalah
(3.28)
(3.29)
(3.30)
(3.31)
(3.32)
(3.33)
Daya reaktif input pada motor adalah
Faktor daya dapat dihitung dengan :
Daya output motor adalah :
P
out= P
1+ P
2Dimana :
Torsi output motor adalah :
T
out= T
1+ T
2Torsi output motor induksi urutan positif dan urutan negative adalah
(3.34)
(3.35)
Dimana kecepatan angular
,
merupakan kecepatan sinkron
dalam radian per detik.
Efisiensi motor induksi didefenisikan sebagai berikut :
3.7 Analisis harmonisa pada motor induksi tiga fasa
Terdapat dua tipe harmonisa yang diselidiki pada motor induksi, yaitu
harmonisa ruang dan harmonisa waktu. Harmonisa ruang adalah harmonisa yang
ditimbulkan oleh interaksi magnetic akibat perbedaan belitan fasa pada saat
menghasilkan medan putar, harmonisa ini dapat diperkecil dengan cara
mengoptimalkan desain mesin. Sedangkan harmonisa waktu adalah harmonisa
yang ditimbulkan oleh beban – beban non linier pada jaringan listrik yang disuplai
pada motor induksi. Pengaruh utama harmonisa waktu pada motor induksi adalah
peningkatan rugi – rugi panas yang mempengaruhi efisiensi kinerja mesin.
3.7.1 Rangkaian ekivalen motor induksi oleh harmonisa ruang
Harmonisa ruang umumnya dimodelkan menggunakan MMF harmonic
dengan memperhitungkan sifat geometris. Berikut ini adalah rangkaian ekivalen
(3.36)
Rs jXsjXs
Rr/Sk jXm
jXr
Gambar 3.6 Rangkaian ekivalen motor induksi oleh harmonisa ruang
Pada sistem yang seimbang, harmonisa ruang juga terdapat harmonisa urutan
positif dan harmonisa urutan negative. Pada harmonisa ruang orde harmonisa
urutan positif adalah 3k+1, sedangkan orde harmonisa urutan negative adalah
3k+2.
dimana k = 1, 2, 3, 4, …..
Slip motor induksi pada operasi normal adalah
Dimana N
smerupakan kecepatan sinkron dan N
rmerupakan kecepatan actual
motor induksi. Kecepatan sinkron motor induksi oleh harmonisa ruang adalah
dari kecepatan sinkron fundamental.
Frekuensi ruang motor induksi sama dengan frekuensi fundamental, f
k= f
1V
kI
2k(3.38) (3.37)
(3.39)
(3.40)
(3.41)
Slip harmonisa ruang urutan positif adalah sebagai berikut :
=
dengan cara yang sama, harmonisa ruang urutan negative adalah sebagai berikut
:
=
Impedansi rangkaian ekivalen motor induksi oleh harmonisa ruang adalah
:
Arus stator motor induksi oleh harmonisa ruang adalah :
Arus rotor motor induksi oleh harmonisa ruang adalah :
(3.42)
(3.43)
3.7.2 Rangkaian ekivalen motor induksi oleh harmonisa waktu
Harmonisa waktu pada motor induksi adalah harmonisa yang ditimbulkan
oleh beban – beban non linier pada jaringan listrik yang disuplai pada motor
induksi. Rangkaian ekivalen motor induksi yang dipengaruhi oleh harmonisa
waktu adalah sebagai berikut :
Rs jkXsjXs
Rr/Sk jkXm
jkXr
Gambar 3.7 Rangkaian ekivalen motor induksi oleh harmonisa waktu
Kecepatan sinkron motor induksi oleh harmonisa waktu adalah k dari kecepatan
sinkron fundamental, sebagai berikut :
n
k= kn
sSedangkan frekuensi motor induksi oleh harmonisa waktu sama dengan k dari
frekuensi fundamental, sebagai berikut :
f
k= kf
1jkXs
I
skI
rk(3.44)
(3.45)
(3.46)
(3.47)
(3.48)
(3.49)
slip motor induksi oleh harmonisa waktu urutan positif adalah :
Dengan cara yang sama, slip motor induksi oleh harmonisa waktu urutan negative
adalah :
Impedansi rangkaian ekivalen motor induksi oleh harmonisa waktu adalah
:
Arus stator motor induksi oleh harmonisa waktu adalah :
Arus rotor motor induksi oleh harmonisa waktu adalah :
Dengan mengabaikan rugi inti dan rugi mekanik, maka daya output adalah :
(3.50)
Torsi motor induksi dipengaruhi oleh harmonisa waktu adalah :
dimana, i=1,2
3.8 Analisis operasi motor induksi tiga fasa disuplai tegangan tidak seimbang
berharmonisa
Pada sistem distorsi harmonisa seimbang, orde harmonisa
3n+1,3n+2,3n+3akan berputar dengan
(3n+1)ω
,(3n+2)ω
,(3n+3)ω
frekuensi radian sesuai
dengan urutan positif, urutan negative, dan urutan nol masing-masing.