DAFTAR PUSTAKA
[1]Zuhal. 1993. Dasar Teknik Tenaga Listrik Dan Elektronika Daya. Penerbit PT
Gramedia Pustaka Utama, Jakarta.
[2]Hutagaol, Julius. 2010. Analisis Karakteristik Tegangan dan Efesiensi Motor
Induksi Tiga Fasa Sebagai Generator Induksi dengan Keluaran Satu Fasa.
Universitas Sumatera Utara, Medan.
[3]Sugiharto B, Agung. Soft Starting dan Dynamic Braking pada Motor Induksi
Tiga Fasa Menggunakan Mikrokontroler AT89S51. Universitas
Diponegoro, Semarang.
[4]Wiharti Wiwik, Zas Ressy A, Andre Marta. 2013. Analisa Kendali
Pengereman Motor Induksi Tiga Fasa dengan Metoda Plugging.
Politeknik Negeri Padang, Padang.
[5]Anwar Salwin, Desmiwarman, Nazris Nazaruddin. 2010. Pemakaian Remote
Control TV Dengan Menggunakan Mikrokontroler AT89S51 Sebagai Alat
Pemutus dan Penghubung Tegangan KWH Meter 1 Phasa. Politeknik
Negeri Padang, Padang
ATMEL.Penerbit ANDI, Yogyakarta.
[7]Sinaga, Rudianto.2008. Pengendali Tegangan Motor Induksi Tiga Fasa
Sebagai Generator (MISG) Pada Setiap Perubahan Beban. Universitas Sumatera Utara, Medan.
[8]Fitzgerald, A.E, Charles Kingsley Jr, Stephen D. Umans.2002. Electric
Machinery, Sixth Edition. Cambridge, MA.
[9]Sibuea, Joseph E. 2011. Analisis Karakteristik Motor Induksi Tiga Fasa
Sebagai Generator (Aplikasi pada P4TK Medan). Universitas Sumatera
Utara, Medan.
[10]Sitepu, Aditia Oktavianus. 2008. Studi Pengaturan Secara Dinamis Pada
Motor Arus Searah Penguatan Shunt Dengan Mikrokontroler. Universitas Sumatera Utara, Medan.
BAB III
METODOLOGI PENELITIAN
3.1 Tempat dan Waktu Penelitian
Penelitian ini dilaksanakan di Laboratorium PPPPTK Medan.
3.2 Bahan dan Perlengkapan Penelitian
1. Bahan Analisa
Bahan yang dianalisa dalam penelitian ini adalah :
• Data pengukuran tegangan yang disuplai ke stator motor induksi tiga
fasa.
• Data pengukuran tegangan output rotor motor induksi tiga fasa.
• Data waktu yang diperlukan untuk melakukan pengereman
regeneratif.
• Data tegangan DC output dari penyearah gelombang penuh satu
fasa.
2. Bahan Perlengkapan
Peralatan pendukung yang digunakan adalah :
• Motor induksi
• Modul mikrokontroler
• Voltmeter
• Amperemeter
• Tachometer
• Pengaman MCB
• Sumber tegangan AC dan DC
• Laptop
3.3 Prosedur Penelitian
Dalam penelitian ini pengukuran tegangan dan arusdibutuhkan untuk melakukan pengereman regeneratif motor induksi tiga fasa. Untuk memperolehnya dilakukan dengan cara mengumpulkan data dari nameplate motor induksi tersebut, kemudian dilakukan perhitungan menggunakan rumus yang ada.
Adapun langkah yang dilakukan dalam prosedur penelitian ini adalah sebagai berikut :
1. Dilakukan pemasangan semua peralatan termasuk alat-alat ukur sesuai rangkaian percobaan.
2. Diatur variabel dalam mikrokontroler menggunakan laptop yang akan mengatur besar keluaran tegangan DC dari komponen pengendali.
3. Dijalankan motor induksi tiga fasa menggunakan sumber tegangan AC tiga fasa.
5. Dijalankan kembali motor induksi tiga fasa menggunakan sumber tegangan AC tiga fasa.
6. Ditekan tombol stop dan supplay AC tiga fasa di lepaskan dari terminal motor induksi melalui rele.
7. Dilepas sumber tegangan AC tiga fasa, maka secara otomatis stator terhubung dengan rangkaian penyearah gelombang penuh tiga fasa.
8. Dicatat waktu yang dibutuhkan motor oleh mikrokontroler dari keadaan berputar hingga berhenti.
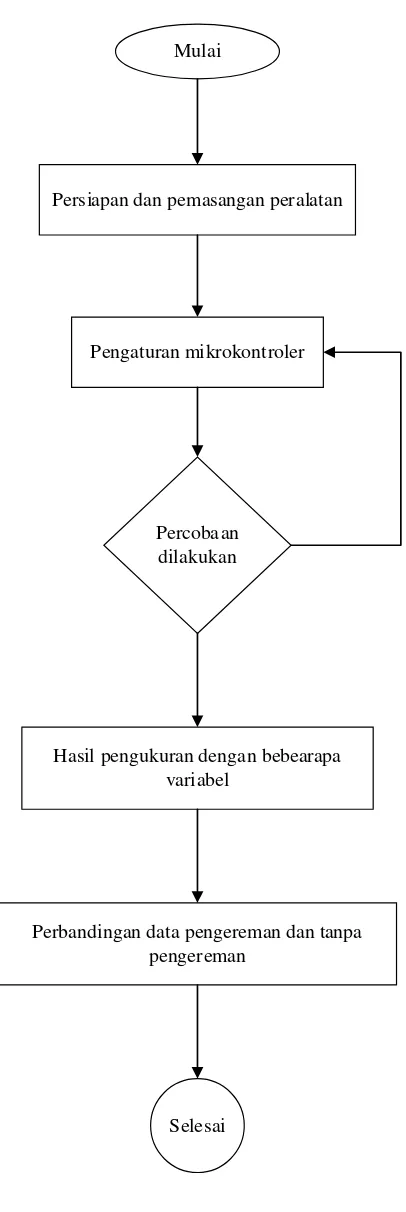
Diagram Alir (Flowchart) Penelitian
Mulai
Pengaturan mikrokontroler
Percobaan dilakukan
Hasil pengukuran dengan bebearapa variabel
Persiapan dan pemasangan peralatan
Perbandingan data pengereman dan tanpa pengereman
Selesai
BAB IV
PENGUJIAN DAN HASIL ANALISA DATA
4.1 Metode Pengujian
Dalam penelitian ini pengujian dilakukan terhadap kinerja peralatan pengendali pengereman regeneratif motor induksi tiga fasa. Peralatan diuji apakah sesuai dengan kinerja yang diinginkan serta menganalisa pengaruhnya terhadap motor induksi tiga fasa.
Dari hasil pengereman regeneratif motor induksi tiga fasa akan diperoleh beberapa parameter yang akan dibandingkan dengan parameter dari hasil pengereman dengan metode yang lain. Dari parameter yang dihasilkan akan dilihat kelebihan dan kekurangan dari masing – masing pengereman.
4.2 Pengujian Pengereman Regeneratif
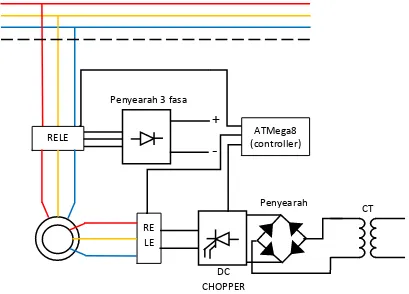
Ketika tombol start ditekan maka motor akan berjalan (berputar) untuk beberapa saat yang diinginkan. Saat tombol stop ditekan maka secara otomatis rangkaian kontrol akan meng-energize kedua rele. Yang artinya rangkaian penyearah gelombang penuh tiga fasa akan terhubung dengan terminal stator dan rangkaian DC chopper akan terhubung dengan rotor. Pada saat yang bersamaan rangkaian DC chopper akan menginjeksikan tegangan searah ke rotor dengan besar yang telah diatur oleh rangkaian kontrol. Karena rotor adalah rangkaian tertutup maka arus akan mengalir. Dan saat itu juga rotor yang dialiri arus listrik akan berputar untuk beberapa saat di dalam medan magnet stator. Sehingga akan terinduksi tegangan di kumparan stator. Tegangan yang dihasilkan bersifat bolak – balik. Tegangan ini akan melewati rangkaian penyearah gelombang penuh tiga fasa untuk di searahkan.
Pengujian untuk pengambilan data dilakukan sebanyak 3 kali dengan input level tegangan searah yang berbeda. Pengujian dilakukan di Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga Kependidikan (PPPPTK) Medan.
Gambar 4.2 Bentuk fisik rangkaian kendali pengereman motor induksi
Sebagai bahan perbandingan, dilakukan juga pengujian terhadap pengereman plugging. Pengereman ini dilakukan dengan membalik (mengubah) urutan fasa belitan sehingga arus yang menagalir di stator berubah. Arus ini mengakibatkan arah putaran rotor berlawanan dengan arah putaran sebelumnya.
Tegangan Input (Volt
DC)
Pengujian 1. Pengereman Regeneratif
Tegangan sumber (Volt AC) : 220 V
Arus nominal (A) : 3,2 A
Tabel 4.1 Data hasil pengujian pengereman regeneratif
Arus DC
Dari tabel 4.1 terlihat bahwa waktu yang dibutuhkan untuk melakukan pengereman regeneratif akan semakin cepat seiring dengan bertambahnya tegangan input DC yang disuplai oleh DC chopper ke belitan rotor.
Tegangan sumber (Volt AC) : 220 V
Arus nominal (A) : 3,2 A
Tabel 4.2 Data hasil pengujian pengereman plugging
Waktu Pengereman (detik) Arus output rotor (A)
0,25 9,2
Dari tabel 4.2 dapat dilihat bahwa pengereman pluggingwaktu yang dibutuhkan relatif lebih cepat bila dibandingkan dengan pengereman regeneratif. Namun kelemahan dari pengereman plugging ialah arus output di rotor relatif besar. Hal ini sangat berbahaya terhadap motor bila pengereman plugging digunakan terus menerus.
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan pengujian peralatan pengereman motor induksi tiga fasa dapat disimpulkan beberapa hal berikut :
1. Peralatan pengujian merupakan prototipe yang dapat melakukan kendali dan pengaturan pengereman regeneratif motor induksi tiga fasa dimana pengereman dapat dilakukan secara efisien.
2. Berdasarkan perbangingan nilai tegangan DC yang disuplai ke rotor, waktu yang dibutuhkan untuk melakukan pengereman akan semakin cepat bila tegangan yang disuplai semakin besar dimana waktu tercepat dalam percobaan diperoleh ketika input tegangan DC sebesar 10 V yaitu 1,84 detik.
3. Dari data pengujian juga dapat dilihat tegangan DC yang dihasilkan pada output stator akan semakin besar bila tegangan yang disuplai ke rotor semakin besar dimana tegangan output terbesar yaitu 90VAC diperoleh ketika input tegangan DC 10 V.
5.2 Saran
1. Pengujian sebaiknya dilakukan untuk motor dengan kapasitas daya yang lebih besar untuk meningkatkan keandalan alat tersebut.
2. Peralatan kendali pengereman regeneratif dapat dimanfaatkan juga untuk metode pengereman yang lain seperti dinamik, plugging, dan mekanik.
BAB II
TINJAUAN PUSTAKA
2.1 Motor Induksi Tiga Fasa
Motor induksi tiga fasa adalah mesin arus bolak – balik (AC) yang berfungsi mengubah atau mengkonversi sumber tenaga listrik AC menjadi tenaga mekanik dalam bentuk putaran rotor. Sesuai penamaannya, motor ini berputar akibat adanya arus induksi yang disuplai ke bagian rotor. Arus induksi ini berasal dari perbedaan relatif putaran rotor dan medan putar yang dihasilkan oleh stator [1]. Sehingga motor ini sering disebut motor tidak serempak.
Motor induksi tiga fasa bekerja berdasarkan prinsip induksi elektromagnetik, dimana arus yang mengalir pada kumparan – kumparan stator mempunyai beda fasa 120°. Beda fasa ini akan menghasilkan medan putar pada stator yang akan memotong kumparan rotor sehingga menginduksi tegangan pada rotor. Karena rotor adalah rangkaian tertutup maka arus akan mengalir pada kumparan rotor. Arus pada rotor ini akan menimbulkan momen (gaya) yang akan memutar rotor.
2.1.1 Konstruksi Motor Induksi Tiga Fasa
Pada prinsipnya motor dan generator induksi tiga memiliki konstruksi yang sama. Hanya aja fungsi dan prinsip kerja dari keduanya berbeda. Generator memanfaatkan energi gerak untuk menghasilkan tenaga listrik sementara motor memanfaatkan energi listrik untuk menghasilkan energi gerak berupa putaran.
Gambar 2.1 berikut menunjukkan bentuk fisik dari sebuah motor induksi tiga fasa. Dari gambar 2.1 dapat kita lihat bagian stator dan rotor motor induksi tiga fasa.
Gambar 2.1 Penampang stator dan rotor motor induksi tiga fasa
Konstruksi atau bagian utama dari motor induksi tiga fasa adalah :
• Stator, adalah bagaian yang diam pada motor induksi tiga fasa. Pada bagian
ini dihubungkan ke sumber tegangan tiga fasa. Stator terdiri dari lapisan laminasi inti yang memiliki alur yang menjadi tempat kumparan dililitkan yang berbentuk silindris. Gambar 2.2 dibawah menunjukkan bentuk fisik dari stator motor induksi tiga fasa.
Tiap lapisan laminasi inti dibentuk dari lempengan besi. Tiap lempengan besi tersebut memiliki beberapa alur dan beberapa lubang pengikat untuk menyatukan inti. Tiap kumparan tersebar dalam alur yang disebut belitan fasa dimana untuk motor tiga fasa, belitan tersebut terpisah secara listrik sebesar 120° [2]. Sesaat setelah dihubungkan dengan sumber tegangan tiga fasa, maka akan dihasilkan medan putar pada stator.
• Rotor, adalah bagian yang berputar pada motor induksi tiga fasa. Rotor
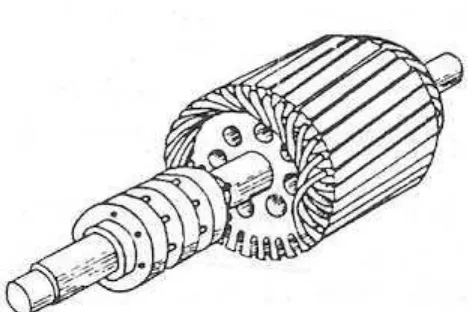
terdiri dari susunan belitan jangkar yang disusun sedemikian rupa. Medan putar pada stator akan memotong belitan pada rotor. Karena rotor adalah rangkaian tertutup maka arus akan mengalir pada belitan rotor. Arus ini akan menimbulkan gaya yang akan menggerakkan rotor searah putaran medan stator. Rotor pada motor induksi tiga fasa ada dua jenis yaitu rotor belitan dan rotor sangkar. Pada penelitian ini akan digunakan jenis rotor belitan. Rotor belitan terdiri dari satu set lengkap belitan tiga fasa yang merupakan bayangan dari belitan statornya. Belitan tiga fasa pada rotor belitan biasanya terhubung Y, dan masing-masing ujung dari tiga kawat belitan fasa rotor tersebut dihubungkan pada slip ring yang terdapat pada poros rotor [2]. Gambar 2.3 menunjukkan bentuk dua dimensi rotor belitan.
Gambar 2.3 Rotor belitan
Gambar 2.4 Skematik diagram motor induksi rotor belitan
Pada gambar 2.4 dapat dilihat bahwa slip ring hanya berfungsi sebagai penghubung belitan rotor dengan tahanan luar. Tahanan luar ini digunakan sebagai pembatas ataupun pengatur arus mula yang besar pengasutan saat start motor. Besar tahanan akan dikurangi secara perlahan hingga nilainya nol sebagaimana motor akan berputar hingga kecepatan nominalnya.
• Celah udara, adalah bagian atau celah sempit yang memisahkan antara
bagian stator dan rotor. Bagian ini memungkinkan rotor dapat berputar di dalam stator. Celah udara ini berjarak 0,4 mm sampai 4 mm [2].
2.1.2 Medan Putar Tiga Fasa
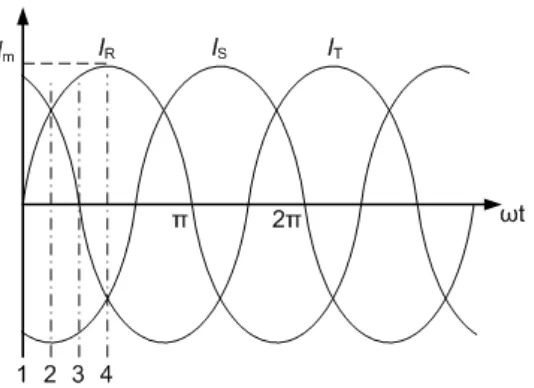
Bila kita menghubungkan terminal belitan stator dengan sumber tegangan tiga fasa ( R, S, T ), maka arus sinusoidal IR, IS, dan IT akan mengalir menuju belitan stator. Arus ini akan menimbulkan ggm ( gaya gerak magnet) pada belitan stator. Gaya gerak magnet tersebut menghasilkan fluks yang berputar sehingga tercipta medan putar pada belitan stator [2]. Medan magnet yang demikian kutub kutubnya tidak diam pada posisi tertentu, tetapi melakukan pergeseran posisinya disekitar stator.Untuk melihat bagaimana medan putar dibangkitkan, maka dapat diambil contoh pada motor induksi tiga fasa dengan jumlah dua kutub. Fluks yang dihasilkan oleh arus bolak - balik pada belitan stator adalah :
a) ΦR= Φm sin ωt ………...…... (2.1a)
b) ΦS = Φmsin (ωt – 120°)………..… (2.1b)
c) ΦT= Φm sin (ωt – 240° )……….… (2.1c)
Gambar 2.5 Arus fasa seimbang
Gambar 2.6 Diagram fasor fluksi tiga fasa seimbang
a) Pada keadaan 1 (gambar 2.6), ωt = 0; arus dalam fasa R bernilai nol sedangkan besarnya arus pada fasa S dan fasa T memiliki nilai yang sama dan arahnya berlawanan. Dalam keadaan seperti ini arus sedang mengalir ke luar dari konduktor sebelah atas dan memasuki konduktor sebelah bawah. Sementara resultan fluks yang dihasilkan memiliki besar yang konstan yaitu sebesar 1,5 Φm dan dibuktikan sebagai berikut :
ΦR= 0
ΦS= Φm sin ( -120° ) =-1,5 Φm
ΦT = Φm sin ( -240° ) = 1,5 Φm
b) Pada keadaan 2, arus bernilai makasimum negatif pada fasa S, sedangkan pada fasa R dan fasa T bernilai 0,5 maksimum pada fasa R dan fasa T, dan pada saat ini ωt = 30°, oleh karena itu fluks yang diberikan masing – masing fasa :
ΦR= Φm sin ( -120° ) = 0,5 Φm
ΦS= Φmsin ( -90° ) =- Φm
ΦT = Φm sin ( -210°) = 0,5 Φm
c) Pada keadaan 3 ωt = 60°, arus pada fasa R dan fasa T memiliki besar yang sama dan arahnya berlawan, oleh karena itu fluks yang diberikan oleh masing – masing fasa :
ΦR= Φmsin ( 60° ) = 1,5 Φm
ΦS = Φmsin ( -60° ) =-1,5 Φm
ΦT = Φm sin ( -180°) = 0 Φm
d) Pada keadaan 4 ωt = 90°, arus pada fasa R maksimum (positif), dan arus pada fasa S dan fasa T = 0,5 Φm, oleh karena itu fluks yang diberikan oleh masing – masing fasa :
ΦR= Φmsin ( 90° ) = Φm
ΦS = Φmsin ( -30° ) =-0,5 Φm
ΦT= Φm sin ( -150°) = -0,5 Φm
2.1.3 Prinsip Kerja Motor Induksi Tiga Fasa
Seperti yang telah dijelaskan sebelumnya, apabila sumber tegangan tiga fasa dihubungkan pada terminal belitan stator maka akan timbul medan putar dengan kecepatan :
�� = 120��... (2.2)
pada belitan rotor timbul tegangan induksi (ggl). Karena belitan rotor adalah rangkaian tertutup, maka ggl (E) akan menghasilkan arus (I). Arus pada rotor menimbulkan medan magnet pada rotor. Medan magnet pada rotor akan menghasilkan fluksi. Interaksi antara fluksi medan stator dan fluksi medan rotor menimbulkan gaya putar (F) yang akan memutar rotor. Bila kopel mula yang dihasilkan gaya (F) pada rotor yang cukup besar untuk memikul kopel beban, rotor akan berputar searah dengan medan putar stator [1].
Agar rotor berputar maka diperlukan perbedaan relatif antara kecepatan medan magnet putar stator ( ns ) dengan kecepatan putar rotor ( nr ). Perbedaan kecepatan antara ns dan nr disebut slip ( S ) dinyatakan dengan :
�= (��−��)
�� × 100%... ... (2.3)
Karena belitan rotor merupakan rangkaian tertutup, baik melalui cincin ujung (end ring) ataupun tahanan luar, maka arus akan mengalir pada konduktor-konduktor rotor. Karena konduktor-konduktor-konduktor-konduktor rotor yang mengalirkan arus ditempatkan di dalam daerah medan magnet yang dihasilkan stator, maka akan terbentuklah gaya mekanik (gaya lorentz) pada konduktor-konduktor rotor. Hal ini sesuai dengan hukum gaya lorentz yaitu bila suatu konduktor yang dialiri arus berada dalam suatu kawasan medan magnet, maka konduktor tersebut akan mendapat gaya elektromagnetik (gaya lorentz) sebesar :
F = B.i.l.sin θ...(2.4)
dimana,
B = kerapatan fluks magnetik (Wb/m2)
i = besar arus pada konduktor (A)
l = panjang konduktor (m)
θ = sudut antara konduktor dan vektor kerapatan fluks magnetik
Gaya F ini adalah hal yang sangat penting karena merupakan dasar dari bekerjanya suatu motor listrik.
Arah dari gaya elektromagnetik tersebut dapat dijelaskan oleh kaidah tangan kanan (right-hand rule). Kaidah tangan kanan menyatakan, jika jari telunjuk menyatakan arah dari vektor arus i dan jari tengah menyatakan arah dari vektor kerapatan fluks B, maka ibu jari akan menyatakan arah gaya F yang bekerja pada konduktor tersebut.
Gaya F yang dihasilkan pada konduktor-konduktor rotor tersebut akan menghasilkan torsi (τ). Bila torsi mula yang dihasilkan pada rotor lebih besar daripada torsi beban (τ0 > τb), maka rotor akan berputar searah dengan putaran
medan putar stator.
Bila nr = ns, tegangan tidak akan terinduksi dan arus tidak akan mengalir pada belitan rotor, dengan demikian tidak dihasilkan kopel. Kopel motor akan timbul apabila nr < ns [1].
2.1.4 Pengereman Motor Induksi Tiga Fasa
sesuai dengan waktu yang dibutuhkan. Dalam perancangan sebuah pengereman pada motor induksi tiga fasa perlu diperhatikan beberapa aspek yang dapat mempengaruhi sistem kerja motor induksi tiga fasa. Beberapa diantaranya adalah waktu yang diperlukan relatif singkat sehingga tidak mempengaruhi waktu operasi motor, pengereman yang baik diusahakan tidak menimbulkan rugi – rugi mekanis yang dapat menghasilkan panas pada motor.
Ada beberapa sistem pengereman yang dapat diterapkan pada motor induksi tiga fasa, yaitu pengereman mekanis dan pengereman elektrodinamis. Pada pengereman elektrodinamis dibagi atas tiga jenis, yaitu pengereman dinamis, pengereman regeneratif, pengereman plugging.
• Pengereman Mekanik
Pada sistem ini pengereman dilakukan dengan menahan putaran rotor menggunakan sepatu rem atau drum rem. Sepatu rem atau drum dipasang pada poros rotor. Sepatu rem ditekan untuk menghasilkan torsi yang menahan putaran rotor. Dalam hal ini akan terjadi gesekan antara poros rotor dengan sepatu rem. Gesekan ini akan menimbulkan panas dan debu di sekitar komponen – komponen motor. Oleh karena itu untuk sistem pengereman yang baik, pengereman mekanis tidak dianjurkan [1].
• Pengereman Dinamis
magnet. Medan magnet akan berputar dengan kecepatan yang sama dengan rotor tetapi dengan arah yang berlawanan untuk menjadikan stasioner terhadap rotor. Interkasi medan resultan dan gaya gerak magnet rotor akan mengembangkan torsi yang berlawanan dengan torsi motor sehingga pengereman terjadi [3].
• Pengereman Regeneratif
Pada prinspnya mesin listrik dinamis dapat bekerja sebagai motor ataupun generator. Dalam sistem pengereman regeneratif, motor induksi tiga fasa akan beralih fungsi sebagai generator. Saat pengereman dilakukan, energi yang tersimpan pada putaran rotor dikembalikan ke jala – jala. Kondisi yang harus dicapai agar pengereman ini terjadi ialah ketika Ea> Vt, yang mengakibatkan daya kembali kepada sistem jala – jala untuk keperluan lain. Pada saat daya dikembalikan ke jala – jala, kecepatan menurun dan proses pengereman berlangsung seperti pada pengereman dinamis [1].
• Pengereman Plugging
Metode pengereman plugging dilakukan dengan cara membalikkan arah putaran rotor sehingga motor dapat menghasilkan torsi penyeimbang dan membentuk daya perlambatan. Medan magnet yang dihasilkan akan berputar dengan kecepatan yang sama dengan rotor tetapi dengan arah yang berlawanan. Interaksi antara medan resultan dan gaya gerak magnet rotor akan mengembang torsi yang berlawanan dengan torsi awal rotor sehingga pengereman terjadi [4].
2.2 Pengereman Regeneratif
Pengereman regeneratif (regenerative braking) menjadi salah satu model pengereman yang dapat meminimalisir energi terbuang dari sebuah sistem pengereman. Artinya pengereman ini disandingkan dengan sistem pengereman lainnya. Secara etimologi regenerative berasal dari kata re-generate yang berarti dibangkitkan kembali. Sehingga secara garis besar pengereman regeneratifdapat digambarkan sebagai sebuah pengereman dengan jalan mengkonversikan energi mekanis menjadi bentuk energi lain yang dapat disimpan untuk digunakan kembali pada saat dibutuhkan.
Dalam penelitian ini sistem pengereman regeneratif dirancang untuk mengefesiensikan penggunaan dan pemanfaatan energi pada motor induksi tiga fasa. Metode pengereman regeneratif terjadi ketika rotor berputar lebih cepat daripada kecepatan medan putar stator sehingga terjadi slip negatif dan mesin menyuplai daya. Dengan kata lain motor berubah fungsi menjadi generator.
Proses yang terjadi ketika bekerja sebagai generator induksi ialah kebalikan dari proses kerja motor induksi. Kopel pada rotor digerakkan oleh energi mekanik sisa, adanya magnetisasi sisa pada rotor cukup untuk membangkitkan tegangan awal. Untuk menguatkan magnetisasi pada rotor maka arus DC dialirkan ke rotor melalui rangkaian DC chopper. Adanya medan magnet yang berputar di rotor akan menginduksikan tegangan ke belitan stator sehingga pada terminal stator akan timbul tegangan bolak – balik. Tegangan bolak – balik ini timbul karena medan magnet yang berputar memotong kumparan stator yang terpisah secara elektrik sebesar 120° dimana kumparan stator dirangkai secara Y.
2.3 Motor Induksi Sebagai Generator Induksi
Secara umum konstruksi motor induksi sama dengan generator induksi, hanya saja generator induksi memerlukan adanya prime mover sebagai penggerak. Oleh karena itu motor induksi tiga fasa dapat dioperasikan sebagai generator dengan cara memutar rotor pada kecepatan di atas kecepatan medan putar stator, sehingga menghasilkan slip (S) negatif. Untuk menjadikan motor induksi sebagai generator maka mesin ini membutuhkan daya reaktif untuk membangkitkan arus eksitasi. Oleh karena itu mesin induksi dapat beroperasi sebagai generator induksi satu fasa maupun tiga fasa.
Gambar 2.7 Rangkaian ekivalen mesin induksi
2.3.1 Slip
Slip adalah nilai suatu dari perbedaan antara frekuensi listrik (rotasi dari medan magnet internal dengan frekuensi gerak (rotasi dari rotor) pada mesin listrik. Selisih antara kecepatan rotor dengan kecepatan sinkron disebut slip (S). Slip dapat dinyatakan dalam putaran setiap menit, tetapi lebih umum dinyatakan sebagai persen dari kecepatan sinkron.
���� (�) =��−��
�� × 100%...(2.3)
nr = kecepatan rotor
ns = kecepatan sinkron
Apabila nr<ns, (0 <s< 1), kecepatan dibawah sinkron akan menghasilkan
kopel, rotor dijalankan dengan mempercepat rotasi medan magnet, tenaga listrik diubah ke tenaga gerak (putaran).
Bilanr= ns, (s = 0), tegangan tidak akan terinduksi dan arus tidak akan mengalir
pada kumparan rotor, sehingga tidak akan dihasilkan kopel.
Bila nr>ns, (s< 0), kecepatan di atas sinkron, rotor dipaksa berputar lebih cepat
daripada medan magnet. Tenaga gerak diubah ke tenaga listrik (daerah generator). Dan bila s = 1, rotor ditahan, tidak ada transfer tenaga. Sedangkan s> 1, kecepatan terbalik, rotor dipaksa bekerja melawan medan magnet (daerah pengereman).
2.3.2 Frekuensi Rotor
Ketika rotor masih dalam keadaan diam, dimana frekuensi arus pada rotor sama seperti frekuensi masukan (sumber). Tetapi ketika rotor akan berputar, maka frekuensi rotor akan bergantung kepada kecepatan relatif atau bergantung tergantung besarnya slip. Untuk besar slip tertentu, maka frekuensi rotor sebesar f’ yaitu :
��− �� =120�′
� , diketahui bahwa �� = 120�
�
Dengan membagikan dengan salah satu, maka didapatkan :
Telah diketahui bahwa arus rotor bergantung terhadap frekuensi rotor f’ = sf dan ketika arus ini mengalir pada masing -masing fasa di belitan rotor, akan memberikan reaksi medan magnet. Biasanya medan magnet pada rotor akan menghasilkan medan magnet yang berputar yang besarnya bergantung atau relatif terhadap putaran rotor sebesar sns.
Pada keadaan tertentu, arus rotor dan arus stator menghasilkan distribusi medan magnet yang sinusoidal dimana magnet ini memilik magnitud yang konstan dan kecepatan medan putar nsyang konstan. Kedua hal ini merupakan
medan magnetik yang berputar secara sinkron. Kenyataannya tidak seperti ini karena pada stator akan ada arus magnetisasi pada kumparannya.
2.3.3 Syarat – Syarat Motor Induksi Sebagai Generator
Motor induksi tiga fasa dapat dioperasikan sebagai generator dengan cara memutar rotor pada kecepatan di atas kecepatan medan putar (nr>ns) dan atau
mesin bekerja pada slip negatif (s <0).
�� = 120�
� ...(2.2)
Dengan ns : Kecepatan medan putar (rpm)
Dengan s : slip
ns : kecepatan medan putar stator (rpm)
nr : kecepatan putar rotor (rpm)
2.4 Rangkaian Penyearah Gelombang Penuh
Fungsi penyearah atau rectifier didalam rangkaian catu daya adalah untuk mengubah tegangan listrik bolak balik menjadi tegangan listrik arus searah [5]. Pada masalah ini akan dibahas penyearah gelombang penuh tiga fasa untuk mengkonversi tegangan bolak balik yang diperoleh saat pengereman regeneratif menjadi tegangan searah. Penyearah gelombang penuh tiga fasa merupakan kombinasi dari tiga penyearah gelombang penuh yang bekerja secara bergantian untuk setiap setengah gelombang dari gelombang masukan.
Penelitian ini menggunakan penyearah gelombang penuh dengan 6 dioda untuk mengkonversi tegangan bolak - balik yang diperoleh dari energi kinetik sisa saat pengereman menjadi tegangan searah. Skema rangkaian penyearah tiga fasa gelombang penuh dapat dilihat pada gambar 2.8 berikut.
D1
D2 D4
D3 D5
D6
Gambar 2.8 Rangkaian penyearah gelombang penuh dengan 6 dioda
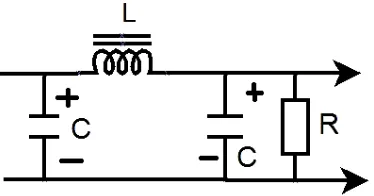
Prinsip kerja dari penyearah gelombang penuh dengan 6 dioda diatas sama dengan prinsip kerja penyearah dengan 2 atau 4 dioda.Keluaran yang berdenyut yang dihasilkan oleh penyearah, hanya sesuai untuk beberapa pemakaian. Tetapi dalam banyak hal, denyut tersebut harus dikurangi dengan menggunakan rangkaian penapis (filter). Rangkaian penapis ialah gabungan dari kumparan induktansi dan kapasitor yang dirangkai sedemikian rupa sehingga energi yang berdenyut disimpan secara bergantian didalam kumparan dan kapasitor, sehingga arus yang mengalir dari penyearah lebih rata.
Gambar 2.9 Rangkaian filter yang digunakan untuk mengurangi denyut keluaran penyearah
2.5 Mikrokontroler ATMega8
Mikrokontroler adalah komputer mikro dalam satu chip tunggal. Mikrokontroler memadukan CPU, ROM, RWM, I/O paralel, I/O seri, counter time, dan rangkaian clock dalam satu chip. Mikrokontroler pada umumnya digunakan sebagai pengontrol kerja dari suatu sistem seperti kerja mesin dan peralatan elektronik. Salah satu jenis mikrokontroler yang paling sering digunakan adalah jenis AVR (Alv and Vegard’s Risc) 8 bit.
Atmega8 termasuk mikrokontroler dengan lebar jalur data 8 bit, hemat energi dan memiliki kinerja tinggi (1 mega instruksi per detik). Kecepatan clocknya dapat mencapai 16MHz. Memori untuk menyimpan program (PEROM) berkapasitas 8 kilobyte. Memori untuk menyimpan data sementara (SRAM) berkapasitas 1 kilobyte. Adapun memori untuk menyimpan data permanen (EEPROM) berkapasitas 512 byte. Memori PEROM dapat dihapus tulis hingga 10.000 kali sedangkan memori EEPROM hingga 100.000 kali.
Mikrokontroler ATMega 8 terdiri dari 3 port utama yaitu PORTB, PORTC, PORTD dengan total pin input/output 23 pin. Port ini digunakan sebagai input/output digital. Adapun fungsi dari tiap pin adalah sebagai berikut :
• ICP1, berfungsi sebagai timer counter 1 capture pin.
• OC1A, OC1B, OC2, difungsikan sebagai keluaran PWM (pulse width modulation).
• MOSI, MISO, SCK, SS, berfungsi sebagai jalur pemrograman serial.
• TOSC2, difungsikan sebagai sumber clock eksternal untuk timer.
• XTAL1, XTAL2, merupakan sumber clock utama mikrokontroler.
• ADC6 channel digunakan untuk mengubah input tegangan analog menjadi data digital.
• I2C digunakan untuk komunikasi dengan sensor atau device lain yang memiliki komunikasi data.
• RESET digunakan untuk merestart program.
• USART berfungsi untuk mengirimkan data serial (TXD) dan untuk menerima data serial (RXD).
• Interupt berfungsi sebagai interupsi hardware.
• XCX dapat digunakan sebagai sumber clock eksternal untuk USART.
• T0 dan T1 berfungsi sebagai masukan counter eksternal untuk timer 1 dan timer 0.
• AIN0 dan AIN1 berfungsi sebagai masukan input untuk analog comparator.
• VCC berfungsi sebagai pin untuk sumber catu daya.
• GND berfungsi sebagai grounding dari komponen.
• AVCC merupakan pin untuk masukan tegangan ADC.
• AREF merupakan input untuk tegangan referensi ADC.
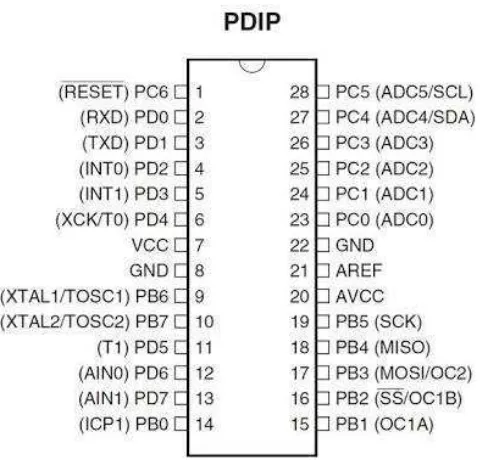
Diagram pin – pin Atmega8 model PDIP dtunjukkan dalam gambar 2.10 [6].
Gambar 2.10Susunan penampang pin ATMega8
Dalam aplikasinya tidak semua pin pada ATMega8 digunakan sebagai kontroler. Hal ini dikarenakan pada dasarnya port B, C dan D dapat digunakan sebagai media input dan output. Port yang digunakan pada pengereman regeneratif antara lain :
Port C6 (pin 1) : Port ini digunakan untuk me-reset atau mengatur ulang kembali program pada ATMega8 ke kondisi semula.sehingga intruksi akan dieksekusi dari awal program.
Port D2 (pin 4) : Port ini digunakan untuk memberi instruksi mengizinkan program menjalankan eksekusi instruksi berikutnya apabila instruksi sebelumnya telah selesai dieksekusi.
Port B6 dan B7 : Port ini digunakan sebagai clock eksternal. Dengan menambahkan komponen kristal dan kapasitor maka clock pada ATMega8 dapat diatur guna mempercepat eksekusi perintah pada program.
Port B1 : Port ini digunakan untuk mengatur tegangan DC yang akan diinput ke rotor melalui transistor.
Port B3, B4 dan B5 : Port ini gunakan sebagai input penulisan baris program pada ATMega8.
Port B5 dan Port AVCC : Port ini digunakan sebagai kontrol switching rele.
Port C1, C2 dan D0 : Port ini digunakan untuk menampilkan parameter yang diukur melalui LCD
Port VCC : Port ini digunakan sebagai sumber catu daya pada ATMega8
Port GND : Port ini digunakan sebagai grounding dari tiap komponen pada ATMega8
2.6 Prinsip Kerja Peralatan
Peralatan dalam penelitian ini teridiri dari beberapa bagian utama yaitu :
1. Controller, bagian ini berfungsi sebagai pengatur sistem kerja dari peralatan. Controller yang digunakan pada peralatan penelitian ini adalah microcontroller ATMega 8. Bagian ini akan mengatur bagaimana pengereman dan penyearahan bekerja secara berurutan. Agar bekerja sesuai dengan kebutuhan maka microcontroller ATMega 8 harus diinput baris – baris program yang sesuai dengan kerja peralatan yang diinginkan.
2. Penyearah gelombang penuh tiga fasa, bagian ini berfungsi untuk menyearahkan tegangan ac menjadi tegangan dc pada saat pengereman terjadi.
3. DC Chopper, bagian ini mengatur jumlah arus DC yang akan dialirkan untuk mengatur putaran rotor.
4. Rele, bagian ini berfungsi sebagai pemutus hubungan motor induksi tiga fasa dengan sumber tegangan tiga fasa.
Sistem bekerja dimulai pada saat motor induksi tiga fasa dihubungkan dengan sumber tegangan tiga fasa. Arus sinusoidal akan mengalir pada kumparan stator sehingga timbul medan magnet putar pada kumparan stator dengan kecepatan putar ns. Medan magnet putar ini akan memotong kumparan jangkar
rotor. Medan magnet ini akan menginduksikan tegangan (ggl) sebesar E. Karena rotor adalah rangkaian tertutup maka arus akan mengalir pada kumparan jangkar. Arus pada kumparan jangkar akan berinteraksi dengan medan magnet stator menghasilkan gaya mekanik yang akan memutar rotor.
Motor dibiarkan berputar hingga mencapai putaran nominalnya. Durasi waktu motor berputar diatur oleh mikrokontroler ATMega 8. Sesaat setelah durasi kerja motor maka mikrokontroler ATMega 8 akan meng-energize rele sehingga terminal stator motor akan terputus hubungannya dari sumber tegangan tiga fasa. Pada saat yang bersamaan mikrokontroler mengatur dc chopper untuk menginjeksikan arus dc ke rotor motor. Pada kondisi ini rotor dalam keadaan masih berputar untuk beberapa saat hingga akhirnya berhenti. Beberapa saat sebelum berhenti motor akan bekerja sebagai generator.
bolak balik pada kumparan stator. Ketika pengereman terjadi terminal stator terhubung dengan rangkaian penyearah tiga fasa gelombang penuh.Sehingga tegangan bolak balik yang dihasilkan pada kumparan stator akan disearahkan menjadi tegangan searah. Demikianlah peralatan ini memanfaatkan energi kinetik putaran rotor saat pengereman, digunakan seolah - olah sebagai penggerak mula untuk memutar rotor. Rotor yang dialiri arus listrik akan berputar dalam medan magnet stator untuk beberapa saat sehingga motor induksi tiga fasa akan berubah fungsi menjadi generator dan menyuplai tegangan. Sehingga model pengereman ini disebut sebagai pengereman regeneratif.
BAB I PENDAHULUAN
1.1 Latar Belakang
Penggunaan motor induksi tiga fasa juga tidak lepas dari pengaturan pengeremannya. Pada umumnya pengereman motor induksi tiga fasa masih menggunakan sistem pengeraman mekanik. Pengereman mekanik dilakukan dengan menekan pedal sepatu rem untuk menahan putaran rotor.
Bila diperhatikan dari sudut pandang rugi – rugi, pengereman mekanik menghasilkan rugi – rugi mekanis berupa gesekan. Gesekan ini akan menimbulkan panas yang dapat mempengaruhi kinerja motor induksi tiga fasa. Bila dilihat dari sudut pandang ekonomisnya, pengereman mekanis mengakibatkan sepatu rem cepat aus sehingga perlu diganti dalam periode tertentu.
Dewasa ini telah dikembangkan pengereman dengan memanfaatkan tenaga listrik atau biasa dikenal dengan sebutan pengereman elektris. Dalam penelitian ini akan dibahas pengereman regeneratif pada motor induksi tiga fasa dengan kontrol mikrokontroler. Dengan adanya pengereman regeneratif energi kinetik yang terbuang saat pengereman dilakukan dapat dimanfaatkan kembali sebagai sumber tenaga listrik. Disamping itu pengereman ini diharapkan dapat mengurangi rugi mekanik serta meningkatkan optimasi baik dari prinsip pengereman regeneratif itu sendiri serta sistem otomasi pengereman.
1.2 Perumusan Masalah
Adapun rumusan masalah dari tugas akhir ini adalah :
• Bagaimana pengontrolan pengereman regeneratif dari keadaan motor
berputar hingga motor berhenti berputar?
• Bagaimana mengkonversi energi mekanik yang tersisa menjadi energi listrik
saat pengereman dilakukan?
• Bagaimana hasil analisa proses pengereman regeneratif terkontrol motor
induksi tiga fasa?
1.3 Batasan Masalah
Agar tujuan penulisan ini sesuai dengan apa yang diharapkan oleh penulis serta terfokus pada judul dan bidang yang telah disebutkan di atas, maka penulis membatasi permsalahan yang akan dibahas yaitu :
• Penelitian dilaksanakan pada laboratorium PPPPTK (Pusat Pengembangan
dan Pemberdayaan Pendidik dan Tenaga Kependidikan) Medan.
• Motor induksi tiga fasa yang diteliti memiliki kapasitas daya 1,1 kW.
• Kontrol pengereman menggunakan mikrokontroler ATMega 8.
• Konverter tegangan menggunakan penyearah gelombang penuh tiga fasa.
• Rugi – rugi tidak dibahas dalam tulisan ini.
• Tidak membahas starting motor induksi.
• Tidak membahas gangguan yang terjadi pada motor induksi.
1.4 Tujuan dan Manfaat Penelitian
1.4.1 Tujuan Penelitian
Adapun tujuan dari penelitian ini adalah :
• Mengetahui dan memahami pengontrolan pengereman regeneratif motor
induksi tiga fasa.
• Mengetahui dan memahami penyearahan tegangan AC menjadi tegangan
DC dengan penyearah gelombang penuh.
• Memahami analisa proses pengereman regeneratif terkontrol motor induksi
tiga fasa.
• Merancang dan membangun rangkaian pengendali motor induksi tiga fasa.
1.4.2 Manfaat Penelitian
Adapun manfaat penelitian ini dilaksanakan antara lain :
• Untuk mengoptimalkan pengereman elektris motor induksi tiga fasa saat
menghentikan putaran motor.
• Untuk memanfaatkan energi mekanik sisa saat dilakukan pengereman.
1.5 Metodologi Penelitian
Langkah – langkah yang dilakukan dalam penulisan tugas akhir ini adalah :
1. Studi literatur
Mempelajari bahan dari buku, jurnal, koran, media elektronik (internet) dan sebagainya sebagai sumber referensi.
2. Studi Lapangan
Menganalisa dan mengujicoba alat yang akan digunakan pada motor induksi yang dilakukan pada laboratorium PPPPTK Medan.
3. Studi Bimbingan
Diskusi, berupa tanya jawab dengan dosen pembimbing yang telah ditunjuk oleh pihak Jurusan Teknik Elektro USU, mengenai masalah – masalah yang timbul selama penulisan Tugas Akhir ini berlangsung.
1.6 Sistematika Penulisan
Penulisan tugas akhir ini ditulis dan disusun dengan urutan sebagai berikut :
BAB I. PENDAHULUAN
Bab ini menjelaskan tentang latar belakang, perumusan masalah, batasan masalah, tujuan dan manfaat penelitian, metode penulisan dan sistematika penulisan.
BAB II. TINJAUAN PUSTAKA
Bab ini mejelaskan secara umum teori dasar motor induksi dan pengendalinya, sistem penyearahan gelombang penuh.
BAB III. METODOLOGI PENELITIAN
Bab ini membahas cara yang harus ditempuh dalam kegiatan penulisan agar pengetahuan yang akan dicapai dari suatu penelitian dapat memenuhi kaidah ilmiah.
BAB IV. HASIL DAN PEMBAHASAN
Bab ini berisi data hasil penelitian yang dilakukan.
BAB V. KESIMPULAN DAN SARAN
Bab ini merupakan bagian penutup yang berisi kesimpulan dari Tugas Akhir dan saran penulis kepada pembaca.
ABSTRAK
Motor induksi ialah motor AC yang penggunaannya sangat banyak baik dalam dunia industri maupun dalam keperluan rumah tangga. Dalam pemakaiannya motor induksi tidak lepas dari sistem pengereman. Pengereman bertujuan untuk menghentikan putaran motor apabila motor sudah tidak digunakan dalam kondisi tertentu.
Salah satu jenis pengereman yang dapat diaplikasikan dalam hal ini adalah metode pengereman regeneratif. Adapun parameter yang diperhatikan dalam pengereman regeneratif ialah tegangan DC yang disuplai ke rotor, waktu pengereman serta tegangan output DC yang dihasilkan pada terminal output stator.
TUGAS AKHIR
PENGATURAN PENGEREMAN REGENERATIF PADA MOTOR INDUKSI TIGAFASA DENGAN MICROCONTROLLER ATMEGA8
Diajukan untuk memenuhi persyaratan
menyelesaikan pendidikan Sarjana (S-1) pada
Departemen Teknik Elektro Sub Konsentrasi Teknik Energi Listrik
Oleh
Yudha Pratama Simamora
NIM : 110402026
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
PENGATURAN PENGEREMAN REGENERATIF PADA MOTOR INDUKSI TIGA FASA DENGAN MICROCONTROLLER ATMEGA 8
Oleh :
YUDHA PRATAMA SIMAMORA NIM: 110402026
Tugas Akhir ini diajukan untuk melengkapi salah satu syarat untuk memperoleh gelar Sarjana Teknik
pada
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
Sidang pada tanggal 16 bulan Maret tahun 2016 di depan Penguji : 1. Ketua Penguji : Ir. Eddy Warman M.T
Ketua Departemen Teknik Elektro,
ABSTRAK
Motor induksi ialah motor AC yang penggunaannya sangat banyak baik dalam dunia industri maupun dalam keperluan rumah tangga. Dalam pemakaiannya motor induksi tidak lepas dari sistem pengereman. Pengereman bertujuan untuk menghentikan putaran motor apabila motor sudah tidak digunakan dalam kondisi tertentu.
Salah satu jenis pengereman yang dapat diaplikasikan dalam hal ini adalah metode pengereman regeneratif. Adapun parameter yang diperhatikan dalam pengereman regeneratif ialah tegangan DC yang disuplai ke rotor, waktu pengereman serta tegangan output DC yang dihasilkan pada terminal output stator.
KATA PENGANTAR
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Esa atas segala berkat dan rahmat yang telah diberikan-Nya kepada penulis, sehingga penulis dapat menyelesaikan Tugas Akhir yang berjudul “Pengaturan Pengereman Regeneratif Pada Motor Induksi Tiga Fasa Dengan Microcontroller Atmega8”. Penulisan Tugas Akhir ini merupakan salah satu persyaratan untuk menyelesaikan studi dan memperoleh gelar Sarjana Teknik di Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara.
Tugas akhir ini penulis persembahkan kepada kedua orang tua penulis, yaitu Alm. Ramlan Simamora dan Nehemia br. Hutauruk, saudari kandung penulis Eirene Yuli Lasniroha Simamora dan Erisha Amelia Agustina Simamora serta kepada keluarga besar Simamora dan Hutauruk atas dukungan dan perhatiannya kepada penulis.
Selama perjalanan masa perkuliahan hingga penyelesaian Tugs Akhir ini, penulis juga mendapat dukungan, bimbingan, dan bantuan dari berbagai pihak. Untuk itu, dengan setulus hati penulis hendak menyampaikan ucapan terima kasih yang sebesar – besarnya kepada :
1. Bapak Ir. Raja Harahap, M.T selaku dosen pembimbing yang telah banyak meluangkan waktu dan memberikan ide dalam menyelesaikan Tugas Akhir ini.
2. Bapak Ir. Eddy Warman, M.T dan Bapak Ir. Syamsul Amien, M.T selaku dosen penguji yang juga sudah memberikan saran maupun masukan dalam menyelesaikan Tugas Akihir ini.
3. Bapak Ir. Surya Tarmizi Kasim, M.Si selaku dosen wali penulis dan selaku Ketua Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara yang senantiasa memberikan bimbingan selama masa perkuliahan.
4. Seluruh staf pengajar dan seluruh pegawai Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara yang telah memberi ilmu dan bantuan administrasi kepada penulis.
5. Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga Kependidikan (PPPPTK) Medan yang telah mengizinkan penulis untuk melakukan penelitian di laboratorium PPPPTK Medan.
6. Keluarga besar Benari Hutauruk yang telah banyak memberikan dukungan, doa serta semangat kepada penulis.
7. Saudara Franking Hutauruk yang sudah banyak memberikan perhatian kepada keluarga saya selama masa pendidikan saya.
8. Sahabat – sahabat yang senantiasa memberi semangat dan saran terbaik : Ari, Sandro, Dedy, Youki, Widy, Mey, Febri, Riandi, Mian, Nerly, Theo, Denago, Toni serta sahabat seperjuangan Guntur Andy.
9. Seluruh keluarga besar Elektro Balak 1 serta keluarga besar Terompet 28
yang namanya tidak dapat disebutkan satu per satu.
10. Serta semua pihak yang tidak dapat penulis sebutkan satu per satu.
Penulis menyadari bahwa Tugas Akhir ini masih jauh dari kesempurnaan, untuk itu penulis mengharapkan saran dan kritik yang membangun demi penyempurnaan isi dan analisa yang disajikan. Penulis juga berharap semoga tulisan ini bermanfaat bagi penulis dan pada khususnya dan semua pihak yang membutuhkannya. Akhir kata penulis mengucapkan terima kasih.
Medan, 05 Oktober 2016
Penulis
(Yudha Pratama Simamora) NIM : 110402026
Daftar Isi
Halaman
Abstrak ... i
Kata Pengantar ... ii
Daftar Isi ... v
Daftar Gambar ... vii
Daftar Tabel ... viii
BAB I. PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Perumusan Masalah ... 1
1.3 Batasan Masalah ... 2
1.4 Tujuan dan Manfaat Penelitian ... 2
1.4.1 Tujuan Penelitian ... 2
1.4.2 Manfaat Penelitian ... 3
1.5 Metodologi Penulisan ... 3
1.6 Sistematika Penulisan ... 3
BAB II. TINJAUAN PUSTAKA ... 6
2.1 Motor Induksi Tiga Fasa ... 6
2.1.1 Konstruksi Motor Induksi ... 6
2.1.2 Medan Putar Tiga Fasa ... 9
2.1.3 Prinsip Kerja Motor Induksi Tiga Fasa ... 12
2.1.4 Pengereman Motor Induksi Tiga Fasa ... 14
2.2 Pengereman Regeneratif ... 16
2.3 Motor Induksi Sebagai Generator Induksi ... 17
2.3.2 Frekuensi Rotor ... 19
2.3.3 Syarat – Syarat Motor Induksi Sebagai Generator ... 20
2.4 Rangkaian Penyearah Gelombang Penuh ... 20
2.5 Mikrokontroler ATMega8 ... 22
2.6 Prinsip Kerja Peralatan ... 25
BAB III. METODOLOGI PENELITIAN ... 28
3.1 Tempat dan Waktu Penelitian ... 28
3.2 Bahan dan Perlengkapan Penelitian ... 28
3.3 Prosedur Penelitian ... 29
BAB IV. PENGUJIAN DAN HASIL ANALISA DATA ... 32
4.1 Metode Pengujian ... 32
4.2 Pengujian Pengereman Regeneratif ... 32
BAB V. KESIMPULAN DAN SARAN ... 37
5.1 Kesimpulan ... 37
5.2 Saran ... 37
Daftar Gambar
Gambar 2.1 Penampang stator dan rotor motor induksi tiga fasa ... 7
Gambar 2.2 Tumpukan inti dan kumparan dalam cangkang stator ... 7
Gambar 2.3Rotor Belitan ... 8
Gambar 2.4 Skematik diagram motor induksi rotor belitan ... 9
Gambar 2.5 Arus fasa seimbang ... 10
Gambar 2.6 Diagram fasor fluksi tiga fasa seimbang ... 10
Gambar 2.7 Rangkaian ekivalen mesin induksi ... 18
Gambar 2.8Rangkaian penyearah gelombang penuh dengan 6 dioda ... 21
Gambar 2.9Rangkaian filter yang digunakan untuk mengurangi denyut keluaran penyearah ... 22
Gambar 2.10Susunan penampang pin ATMega8 ... 24
Gambar 3.1Diagram alir penelitian ... 30
Gambar 4.1Diagram pengujian pengereman regeneratif ... 32
Gambar 4.2Bentuk fisik rangkaian kendali pengereman motor induksi ... 33
Gambar 4.3Peralatan pengujian pengereman regeneratif ... 33
Daftar Tabel