BAB II
TINJAUAN PUSTAKA
2.1 Umum
Pada umumnya motor induksi tiga fasa merupakan motor bolak-balik yang
paling luas digunakan dan berfungsi untuk mengubah energi listrik menjadi energi
mekanis berupa tenaga putar. Dari konstruksinya, motor ini terdiri dari dua bagian
yaitu bagian yang diam dan bergerak. Bagian yang diam disebut juga stator,
terdiri dari inti-inti besi yang dipisah oleh celah udara dan membentuk rangkaian
magnetik yang menghasilkan fluksi magnet putar, akibat kumparan stator
dihubungkan ke sumber tegangan tiga fasa, sedangkan bagian bergerak yang
disebut juga rotor, terdiri dari pada kondukor yang dialiri arus, sehingga pada
konduktor ini berinteraksi dengan fluksi yang dihasilkan stator yang akan
menyebabkan timbulnya gaya. Setiap bagian stator dan rotor masing-masing
memiliki terminal masukan. Inputan dari motor induksi ini sendiri adalah
tegangan AC yang dihubungkan lewat terminal stator.
Ada dua tipe motor induksi berdasarkan jenis rotornya, yaitu motor induksi
tipe rotor sangkar dan tipe rotor belitan. Rotor belitan terdiri atas beberapa lilitan
kumparan yang terbuat dari tembaga. Pemilihan pemakaian motor sendiri,
ditentukan dari daya mekanis yang dihasilkan oleh motor. Prinsip kerja dari motor
ini bersifat induksi, yang mana arus pada rotor tidak didapatkan dari sumber
tertentu, melainkan arus yang terinduksi akibat adanya perbedaan relatif antara
putaran rotor dan medan putar yang dihasilkan stator [2].
2.2. Kontruksi Motor Induksi Tiga Fasa Rotor Belitan
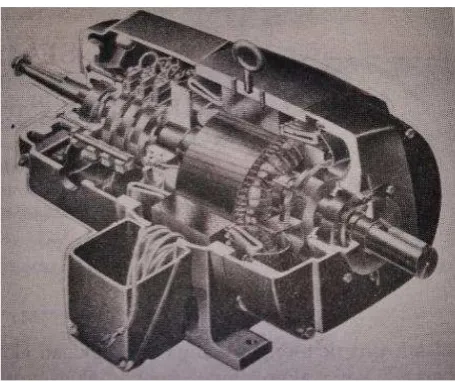
Konstruksi dari motor induksi tiga fasa rotor belitan dapat dilihat pada
Gambar 2.1
Gambar 2.1 Kontruksi Motor Induksi Tiga Fasa Rotor Belitan [5]. Pada Motor induksi tiga fasa rotor belitan, terdapat bagian yang memiliki
peran penting dalam cara kerja motor induksi. Kedua bagian tersebut adalah stator
dan rotor. Berikut sedikit penjelasan mengenai stator dan rotor.
a. Stator
Stator merupakan bagian yang diam dari sutau motor induksi, dan merupakan
input dari motor induksi karena pada motor, bagian inilah yang dihubungkan ke
sumber tegangan AC. Pada bagian stator terdapat beberapa slot yang merupakan
tempat kawat (konduktor) dari tiga kumparan tiga fasa yang disebut kumparan
stator, yang masing-masing kumparan akan mendapat suplai arus tiga fasa [6].
Saat kumparan stator mendapat suplai tiga fasa, maka akan timbul fluksi magnet
pada kumparan tersebut. Yang mengakibatkan rotor berputar karena ada induksi
yang disebut belitan fasa, belitan tersebut terpisah secara listrik sebesar 120º.
Kawat kumparan yang digunakan terbuat dari tembaga yang dilapis dengan isolasi
tipis. Kemudian tumpukan inti dan dan belitan stator dalam cangkang silindris.
Gambar 2.2. Komponen Stator Motor Induksi Tiga fasa
(a) Lempengan inti, (b) Tumpukan inti dengan kertas isolasi padabeberapa
alurnya, (c) Tumpukan inti dan kumparan dalam cangkang stator.
b. Rotor
Rotor merupakan bagian yang bergerak atau berputar pada motor induksi.
Rotor belitan terdiri dari kumparan-kumparan lilitan kumparan tembaga. Terminal
lilitan rotor dihubungkan dengan cincin slip yang terisolasi dan dipasang pada
poros rotor. Rotor tidak dihubungkan secara listrik ke pencatu tetapi mempunyai
arus yang dinduksikan ke dalamnya oleh kerja transformator dari stator [7].
Konstruksi rotor belitan ditunjukan pada Gambar 2.3. Pada rotor belitan, cincin
slip terhubung ke sebuah tahanan luar (rheostat) yang dapat mengurangi arus start
(pengasutan). Selama pengasutan, penambahan tahanan eksternal pada rangkaian
rotor belitan menghasilkan torsi pengasatun yang lebih besar dengan arus
Gambar 2.3 Konstruksi Rotor Belitan [2].
2.3 Prinsip Kerja Medan Putar [2]
Perputaran motor pada mesin arus bolak balik ditimbulkan oleh adanya
medan putar (fluks yang berputar) yang dihasilkan dalam kumparan statornya.
Medan putar ini terjadi apabila kumparan stator dihubungkan dalam fasa banyak,
umumnya fasa 3. Hubungan dapat berupa hubungan bintang ataupun delta.
Disini akan dijelaskan bagaimana terjadinya medan putar itu, perhatikan
Gambar 2.4 Proses terjadinya medan putar [2].
Misalkan kumparan a-a, b-b, c-c dihubungkan tiga phasa, dengan beda
phasa masing – masing 120° (gambar 2.4) dan dialiri arus sinusoid. Distribusi ,
, sebagai fungsi waktu adalah seperti gambar 2.4. Pada keadaan , , dan
fluks resultan yang ditimbulkan oleh kumparan tersebut masing masing adalah
seperti gambar 2.4 c, d, e dan f. Pada fluks resultan mempunyai arah sama
dengan arah fluks dihasilkan oleh kumparan b-b. Untuk , fluks resultannya
berlawanan arah dengan fluks resultan yang dihasilhan pada saat .
Analisis secara vektor didapat atas dasar:
1) Arah fluks yang ditimbulkan oleh arus yang mengalir dalam suatu lingkar
sesuai dengan perputaran sekrup (gambar 2.5.a ).
2) Kebesaran fluks yang ditimbulkan ini sebanding dengan arus yang mengalir.
Gambar 2.5 Arah gaya (F) yang ditimbulkan fluks [2].
Notasi yang dipakai untuk menyatakan positif atau negatifnya arus yang
mengalir pada kumparan a – a, b – b, dan c – c pada Gambar 2.5 yaitu: harga
b, c ), sedangkan negatif apabila tanda titik ( . ) terletak pada pangkal konduktor
tersebut. Maka diagram vektor untuk fluks total pada keadaan t1, t2, t3, t4, dapat
dilihat pada Gambar 2.6.
Gambar 2.6 Vektor resultan F pada keadaan t [2].
2.4 Prinsip Kerja Motor Induksi Tiga Fasa [2]
Untuk memperjelas prinsip kerja motor induksi tiga fasa, Ada beberapa
prinsip kerja motor induksi tiga phasa:
1. Apabila sumber tegangan 3 fasa dipasang pada kumparan stator,timbullah
medan putar dengan kecepatan ...(2.1)
2. Medan putar stator tersebut akan memotong batang konduktor pada rotor.
3. Akibatnya pada kumparan rotor timbul induksi (ggl) sebesar:
...(2.2)
adalah tegangan induksi pada saat rotor berputar.
4. Karena kumparan rotor merupakan rangkaian yang tertutup, ggl (E) akan
menghasilkan arus.
5. Adanya arus (I) di dalam medan magnet menimbiulkan gaya (F) pada rotor.
6. Bila kopel mula yang dihasilkan oleh gaya (F ) pada rotor cukup besar untuk
memikul kopel beban, rotor akan berputar searah dengan medan putar stator.
7. Seperti yang telah dijelaskan pada (3) tegangan induksi timbul karena
terpotongnya batang konduktor (rotor) oleh medan putar stator. Artinya agar
tegangan terinduksi, diperlukan adanya perbedaan relatif antara kecepatan
medan putar stator (ns) dengan kecepatan berputar rotor (nr).
8. Perbedaan kecepatan antara nr dan ns disebut slip (S) dan dinyatakan dengan
kumparan jangkar rotor, dengan demikian tidak dihasilkan kopel. Kopel motor
akan ditimbulkan apabila nr lebih kecil dari ns.
10.Dilihat dari cara kerjanya, motor induksi disebut juga sebagai motor tak
2.5Rangkaian Ekivalen Motor Induksi 3 Fasa
Operasi dari motor induksi tergantung pada induksi arus dan tegangan di
dalam rangkaian rotor yang berasal dari rangkaian stator karena adanya aksi
transformator. Karena induksi arus dan tegangan pada motor induksi pada
dasarnya sama dengan operasi transformator, maka rangkaian ekivalen motor
induksi akan sangat menyerupai rangkaian ekivalen dari transformator. Motor
induksi disebut juga sebagai singly excited machine, sebab daya hanya disuplai
dari rangkaian stator.
Karena motor induksi tidak memiliki rangkaian medan, maka pada modelnya
tidak akan terdapat sumber tegangan internal EA sebagaimana dijumpai pada
mesin sinkron.
Rangkaian ekivalen per phasa dari transformator dapat menggantikan operasi dari
motor induksi. Sebagaimana halnya pada transformator, maka akan terdapat
tahanan (R1) dan induktansi sendiri (X1) pada belitan stator yang
direpresentasikan dalam rangkaian ekivalen mesin.
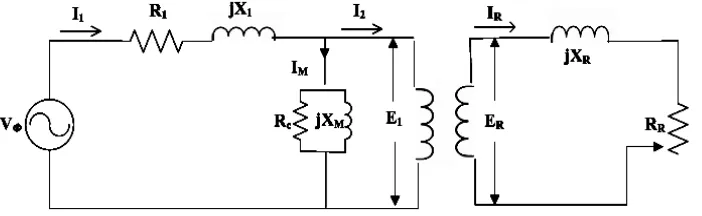
Gambar 2.8 Rangkaian ekivalen motor induksi sebagai model transformator
Tegangan stator E1 dikopel terhadap sisi sekunder ER sebagaimana halnya
mudah dapat ditentukan pada motor induksi rotor belitan, yang mana pada
dasarnya rasio ini merupakan banyaknya konduktor per phasa pada stator terhadap
jumlah konduktor per phasa pada rotor. Akan tetapi tidak demikian halnya pada
motor induksi sangkar tupai, karena tidak terdapatnya belitan pada rotor motor
tersebut. Tegangan ER pada rotor akan menghasilkan arus, karena rangkaian
rotornya terhubung singkat.
Impedansi rangkaian primer dan arus magnitisasi dari motor induksi sama
halnya dengan komponen - komponen yang dijumpai pada transformator. Hal
yang membedakan rangkaian ekivalen tersebut pada motor induksi dikarenakan
terdapatnya variasi frekuensi pada tegangan rotor (ER), impedansi rotor RR dan
jXR.
Ketika tegangan diberikan pada belitan stator, maka tegangan akan
diinduksikan pada belitan rotornya. Pada umumnya, gerak relatif yang lebih besar
di antara rotor dan medan putar stator, akan menghasilkan tegangan dan frekuensi
rotor yang lebih besar juga. Gerak relatif yang terbesar terjadi saat rotor dalam
keadaaan diam atau disebut juga dalam keadaan blocked rotor. Sebaliknya,
frekuensi dan tegangan terendah timbul saat rotor berputar pada kecepatan yang
sama dengan kecepatan sinkron, sehingga tidak terdapat pergerakan relatif.
Magnitud dan frekuensi tegangan induksi rotor pada saat berputar sebanding
dengan slip dari rotornya. Sehingga, besarnya tegangan induksi rotor dalam
kondisi rotor terkunci disebut ERO, sedangkan untuk slip pada suatu putaran
tertentu dirumuskan dengan :
... (2.4)
...(2.5)
Tahanan dari rotor RR bernilai konstan/ tidak tergantung pada slip, sementara itu
pada reaktansi rotor besarnya akan dipengaruhi oleh slip.
Reaktansi dari rotor tergangtung pada induktansi rotor, frekuensi tegangan
rotor dan arus pada rotor. Bila induktansi rotor LR, maka reaktansi rotor adalah :
XR= ωr LR= 2 π fr LR : fr = sfe
Sehingga:
XR = 2 π sfe LR
= s(2 π sfe LR)
...(2.6)
LR = induktansi rotor
XRO = reaktansi blok rotor.
Gambar 2.9 Rangkaian ekivalen rotor motor induksi
Dari gambar 2.7 arus pada rotor dapat ditentukan sebagai :
...(2.7)
...(2.8)
...(2.9)
IR = arus rotor ( A )
ER = tegangan induksi pada rotor ( V )
RR = tahanan rotor ( Ώ )
XR = reaktansi rotor ( Ώ )
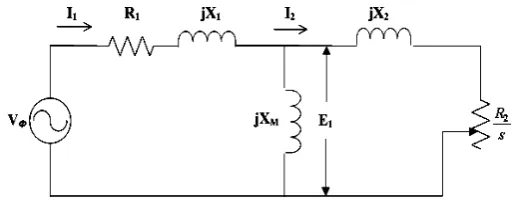
Dalam teori transformator, analisa rangkaian ekivalen sering
disederhanakan dengan mengabaikan seluruh cabang magnetisasi atau dengan
memindahkan langsung ke terminal primer. Pendekatan demikian tidak
dibenarkan dalam motor induksi yang bekerja dalam keadaan normal, karena
adanya celah udara yang menjadikan perlunya suatu arus magnetisasi yang sangat
besar (30% sampai 40% dari arus beban penuh). Untuk itu dalam rangkaian
ekivalen RC dapat diabaikan. Rangkaian ekivalennya adalah seperti pada gambar
berikut.
Gambar 2.10 Rangkaian ekivalen motor induksi jika rugi-rugi inti diabaikan
2.6Desain Motor Induksi Tiga Fasa
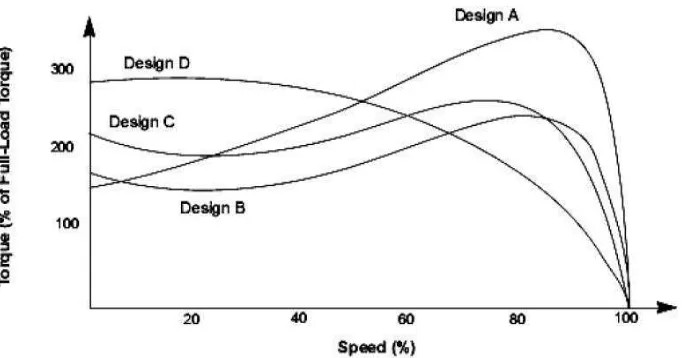
Standard NEMA pada dasarnya mengkategorikan motor induksi ke dalam
empat kelas yakni disain A,B,C, dan D. Karakteristik torsi – kecepatannya dapat
Gambar 2.11 Karakteristik torsi kecepatan motor induksi pada berbagai desain. Kelas A : disain ini memiliki torsi start normal (150 – 170%) dari nilai
ratingnya) dan arus start relatif tinggi. Torsi break down nya merupakan
yang paling tinggi dari semua disain NEMA. Motor ini mampu menangani
beban lebih dalam jumlah besar selama waktu yang singkat. Slip < = 5%
Kelas B : merupakan disain yang paling sering dijumpai di pasaran. Motor
ini memiliki torsi start yang normal seperti halnya disain kelas A, akan
tetapi motor ini memberikan arus start yang rendah. Torsi locked rotor
cukup baik untuk menstart berbagai beban yang dijumpai dalam aplikasi
industri. Slip motor ini < =5 %. Effisiensi dan faktor dayanya pada saat
berbeban penuh tinggi sehingga disain ini merupakan yang paling populer.
Aplikasinya dapat dijumpai pada pompa, kipas angin/ fan, dan peralatan –
Kelas C : memiliki torsi start lebih tinggi (200 % dari nilai ratingnya) dari
dua disain yang sebelumnya. Aplikasinya dijumpai pada beban – beban
seperti Universitas Sumatera Utara
konveyor, mesin penghancur (crusher), komperessor,dll. Operasi dari
motor ini mendekati kecepatan penuh tanpa overload dalam jumlah besar.
Arus startnya rendah, slipnya < = 5 %
Kelas D : memiliki torsi start yang paling tinggi. Arus start dan kecepatan
beban penuhnya rendah. Memiliki nilai slip yang tinggi ( 5-13 % ),
sehingga motor ini cocok untuk aplikasi dengan perubahan beban dan
perubahan kecepatan secara mendadak pada motor. Contoh aplikasinya :
elevator, crane, dan ekstraktor.
2.7 Torsi dan Putaran Motor Induksi
Sumber tegangan yang disuplai ke motor tidak langsung terhubung ke
rotor, melainkan terhubung ke stator dahulu, setelah itu terjadi proses induksi dari
stator ke rotor akibat adanya perbedaan relatif antara putaran rotor dengan medan
putar yang dihasilkan oleh arus stator [2]. Sehingga daya yang melewati celah
udara sama dengan daya yang masuk ke rotor. Adapun rumusan persamaan dari
total daya pada kumparan stator (Pin) adalah sebagai berikut :
θ : perbedaan sudut fasa antara arus masukan dengan tegangan
sumber
Pada pengoperasiannya, motor induksi sering mengalami rugi-rugi seperti
rugi-rugi inti stator (PC) dan rugi-rugi tembaga stator (PSCL). Dan kedua rugi-rugi
ini timbul sebelum daya ditransfer lewat celah udara. Daya yang ditransfer
melalui celah udara (PAG) adalah penjumlahan dari rugi-rugi tembaga rotor (PRCL)
dan daya yang dikonversi (PCONV). Daya yang melewati celah udara ini disebut
Berikut gambar 2.12 yang menunjukkan Diagram aliran daya motor induksi :
Gambar 2.12 Diagram Aliran Daya [8].
Dimana :
- PC = rugi – rugi inti pada stator (Watt)
- PAG = daya yang ditransfer melalui celah udara (Watt)
- PRCL = rugi – rugi tembaga pada belitan rotor (Watt)
- PA-G = rugi – rugi gesek + angin (Watt)
- PSLL = stray losses (Watt)
- PCONV = daya mekanis keluaran (output) (Watt)
Berdasarkan rangkaian ekivalen dan diagram aliran daya motor induksi tiga
fasa, dapat diturunkan suatu rumusan umum untuk torsi induksi sebagai fungsi
dari kecepatan. Berikut persamaan Torsi motor induksi :
m
Adapun cara kerja dari timbulnya putaran pada motor induksi sebagai berikut,
ketika sumber tegangan dicatu pada stator , maka timbul medan magnet (medan
putar). Medan magnet ini berputar dengan kecepatan sinkron disekitar rotor dan
memotong konduktor rotor. Karena kumparan rotor merupakan rangkaian
tertutup, timbullah arus rotor yang menghasilkan medan magnet, yang berusaha
untuk melawan medan magnet stator, adanya arus di dalam medan magnet
menimbulkan gaya pada rotor yang membuat rotor berputar [2].
Terjadinya perbedaan antara dua kecepatan tersebut disebabkan adanya
terjadi pada motor induksi. Pada motor induksi biasanya dipasang cincin/slip ring
untuk menghindari slip dan motor tersebut dinamakan “motor cincin geser/slip
ring motor”. Berikut adalah persamaan untuk menghitung persentase slip/geseran.
%
2.8 Penentuan Parameter Motor Induksi [8]
Data yang diperlukan untuk menghitung performansi dari suatu motor
induksi dapat diperoleh dari hasil pengujian tanpa beban, pengujian rotor tertahan,
dan pengukuran tahanan dc lilitan stator.
2.8.1 Pengujian Tanpa Beban
Pengujian ini untuk mengukur rugi-rugi putaran dan arus magnetisasi. Pada
keadaan tanpa beban (beban nol), beban yang dipikul hanyalah rugi-rugi angin
dan gesekan. Adapun rangkaian pengujian tanpa beban adalah sebagai berikut:
Gambar 2.13 Rangkaian pengujian tanpa beban motor induksi [8].
Rugi rotor ini dianggap sebagai rugi angin dan gesekan, sedangkan rugi tembaga
stator dapat dicari sebagai:
Dimana I1 disini sama dengan Ibn (fasa) dan R1 dicari lewat pengujian tahanan
stator arus searah.
Persamaan daya:
Pin (bn) = Pts + Prot ... (2.17)
Prot = P1 + Pa&g + rugi rugi lain ... .(2.18)
Dimana:
Prot = daya yang hilang akibat adanya putaran (Watt)
Pi = rugi inti (Watt)
Pa&g = rugi angin dan gesekan (Watt)
2.8.2 Pengujian Tahanan Stator Arus Searah
Pengujian ini digunakan untuk mengetahui nilai parameter resistansi stator
(primer) R1. Pada pengujian ini kumparan stator dialiri arus searah, sehingga
suhunya mencapai suatu nilai yang sama jika motor induksi beroperasi pada
kondisi operasi normal (resistansi kumparan merupakan fungsi suhu).
Gambar 2.14. Rangkaian Uji Tahanan Stator Arus Searah Motor Induksi [8].
Pada percobaan ini, jika kumparan stator terhubung bintang (gambar 2.13a), maka
arus akan mengalir melewati dua kumparan dengan resistansi
sebesar 2R1, sehingga:
R1
=
... (2.19)
Sedangkan jika terhubung segitiga (gambar 2.14b), maka arus akan mengalir
melewati ketiga kumparan tersebut yang besarnya secara ekivalen terlukis pada
gambar berikut, dengan resistansi total:
Gambar 2.15 Pengukuran Untuk DC Test [8].
Sehingga:|
atau
R1 =
... (2.20)
Nilai R1 yang didapat hanya merupakan nilai pendekatan, karena padakondisi
operasi normal, motor induksi diberikan pasokan tegangan arus bolakbalikyang
dapat menimbulkan efek kulit (skin effect) yang mempengaruhi besarnya nilai R1.
2.8.3 Pengujian Rotor tertahan
Pada pengukuran ini rotor dipaksa tidak berputar (nr = 0 sehingga s = 1) dan
kumparan stator dihubungkan dengan tegangan seimbang karena slip s = 1 maka
harga = R2 karena
|
R2‟ + jX2|<<|
Rc| jXm|
maka arus yang melewati|
Rc||
jXm|
dapat diabaikan sehingga rangkaian ekivalen motor induksi dalamGambar 2.16 Rangkaian rotor ditahan motor induksi [8].
Impedansi perphasa pada saat rotor tertahan (ZBR) dapat dirumuskan sebagai
berikut:
ZBR = R1 + R2 + j(X1 + X2) = RBR + jXBR (Ohm) ...(2.21)
Pengukuran ini dilakukan pada arus mendekati arus rating motor. Data hasil
pengukuran ini meliputi: arus input (I1=IBR), tegangan input (V1=VBR) dan daya
input per phasa (PBR=Pin). Karena adanya distribusi arus yang tidak merata pada
batang rotor akibat efek kulit harga R2 menjadi tergantung frekuensi. Maka
umumnya dalam praktek pengukuran rotor tertahan dilakukan dengan mengurangi
frekuensi eksitasi menjadi fBR untuk mendapatkan harga R2‟ yang sesuai dengan
frekuensi rotor pada saat slip ring. Data data tersebut, harga RBR dan XBR dapat
dihitung:
RBR =
...(2.22)
2.9 Rating Temperatur dan Metode Pengukuran Temperatur Motor Induksi
Menurut National Electrical Manufacturing Association (NEMA) ,
temperature rise merupakan naiknya temperatur melebihi temperature ambient.
Sementara Temperature ambient itu sendiri adalah temperatur udara yang berada
disekeliling motor atau yang sering disebut sebgai suhu ruangan. Total Panas dari
motor itulah merupakan jumlah dari temperatur rise dan temperatur ambient.
Kelas isolasi temperature pada motor induksi dijelaskan oleh tabel berikut
Tabel 2.1 Temperature rise for large motors with 1.0 sevice factor
Faktor penyebab rusaknya isolasi winding adalah panas yang berlebih pada
motor. Panas berlebih yang berlangsung lama pada lilitan akan menyebabkan
stress pada lilitan dan isolasi kawat menjadi rapuh. Jika dibiarkan terlalu lama
akan menyebabkan isolasi pada lilitan akan retak. Jika gejala ini disertai dengan
munculnya partial discharge maka proses penuaan isolasi akan semakin cepat.
Berdasarkan penelitian NEMA usia dari isolasi winding akan berkurang
setengahnya setiap kenaikan 10 oC dari kondisi normal kerja motor. Akan tetapi
jika motor harus beroperasi 40 oC di atas temperature normal maka umur
isolasinya menjadi 1/16 dari umur normal yang diperkirakan. Oleh sebab itu
motor- motor listrik yang digunakan pada dunia industri menggunakan alat
proteksi untuk mengatasi panas lebih pada motor seperti thermal overload relay.
Sehingga apabila terjadi overheating pada motor relai akan segera bekerja
Ada beberapa metode dalam menentukan temperature dari motor induksi. Berikut
adalah beberapa metodenya [4] :
a. Menggunakan thermometer infrared
Metode ini adalah penentuan suhu dengan sensor suhu, atau dengan
thermometer infrared, dengan metode ini instrumen diterapkan pada bagian
terpanas dari mesin yang dapat diakses.
b. Mengunakan Embedded Detector
Motor yang menggunakan embedded detector pada lilitannya dapat
dimonitor langsung output yang dideteksi pada peralatan. Output temperature
yang ditunjukkan adalah temperature terpanas dimana lokasi sensor diletakkan.
Perbedaan antara embedded detector dengan thermometer infrared yaitu
embedded detector tertanam di lilitan stator motor sedangkan thermometer
infrared dapat diletakkan dimana saja bagian motor yang paling panas yang
mudah diakses.
c. Mengukur Tahanan Lilitan motor
Metode digunakan untuk motor yang tidak memiliki embedded detector
seperti thermocouple atau resistance temperature detectors (RTDs). Kelebihan
metode ini yaitu dapat dilakukan tanpa harus membongkar kerangka motor
Penentuan temperature dengan metode ini yaitu dengan membandingkan
tahanan lilitan motor pada temperature yang ingin ditentukan (pada saat motor
panas) dengan tahanan yang sudah diketahui temperaturnya
(temperatureambient). Temperature tahanan yang ingin ditentukan dapat dihitung
dengan persamaaan :
Dimana : Tt : Temperatur total lilitan (oC)
Tb : Temperatur pada saat motor dingin (oC)
Rt : Tahanan pada saat motor panas (ohm)
Rb : Tahanan pada saat motor dingin (ohm)
K : 234.5 ( konstanta untuk bahan tembaga ) (oC)
225 ( konstanta untuk bahan aluminium ) (oC)
2.10 Tegangan Kerja
Tegangan kerja (Tegangan Pelayanan) adalah tegangan pada terminal
suplai, yaitu yang diukur pada alat pembatas dan pengukur (APP) milik PLN pada
pelanggan. Tegangan inilah yang disalurkan ke pelanggan untuk menyuplai
perlatan-peralatan sistem tenaga listrik sesuai dengan kebutuhan. Tegangan kerja
(Tegangan pelayanan) ini bervariasi, bisa kurang dari tegangan nominalnya dan
juga bisa lebih dari tegangan nominalnya. Menurut SPLN 1 tahun 1995 variasi
tegangan yang diizinkan maksimum + 5%, dan minimum -10% dari tegangan
nominal [1].
Faktor – faktor yang menyebabkan gangguan pada motor listrik antara
lain :
a. Berasal dari alat yang digerakkan
b. Dari jaringan suplai
Suplai tegangan yang kurang/rendah dapat menyebabkan kenaikan arus
pada beban yang sama, sehingga belitan motor akan mengalami pemanasan lebih.
Sementara tegangan yang lebih dapat menyebabkan umur isolasi menurun,
bahkan tembusnya kekuatan isolasi. Tegangan turun disebabkan oleh:
a. Overload pada jaringan.
b. Kesalahan operasi pada tap-changer transformator
c. Hubung pendek
2.11 Tegangan nominal suatu sistem
Tegangan nominal suatu sistem adalah nilai tegangan yang disandang
suatu sistem atau perlengkapan dan kepadanva karakteristik kerja tertentu dari
sistem dan perlengkapan itu dirujuk. Biasanya tegangan ini tertera pada nameplate
body peralatan yang sudah sesuai spesifikasi pabrik [1].


![Gambar 2.4 Proses terjadinya medan putar [2].](https://thumb-ap.123doks.com/thumbv2/123dok/2651425.1301001/5.595.200.432.557.632/gambar-proses-terjadinya-medan-putar.webp)
![Gambar 2.6 Vektor resultan F pada keadaan t [2].](https://thumb-ap.123doks.com/thumbv2/123dok/2651425.1301001/6.595.197.421.610.726/gambar-vektor-resultan-f-pada-keadaan-t.webp)

![Gambar 2.12 Diagram Aliran Daya [8].](https://thumb-ap.123doks.com/thumbv2/123dok/2651425.1301001/14.595.153.468.525.662/gambar-diagram-aliran-daya.webp)
