ALGORITMA CLOSEST PAIR POINT PADA PROSES PERBANDINGAN DATA TCS3200 namun belum ada penelitian yang membahas mengenai algoritma yang digunakan pada proses perbandingan data hasilnya. Pada penelitian ini digunakan algoritma closest pair point untuk membandingkan data hasil pembacaan sensor warna TCS3200. Algoritma ini tidak dapat langsung diterapkan pada perbandingan nilai RGB hasil pembacaan sensor warna TCS3200, untuk itu diperlukan pengembangan dari algoritma tersebut. Pengembangan algoritma closest pair point dilakukan dengan mengubah komponen x dan y menjadi komponen RGB. Dari hasil penelitian dapat disimpulkan bahwa algoritma closest pair point dapat dikembangkan untuk membandingkan data hasil pembacaan sensor warna TCS3200, tingkat keberhasilan algoritma closest pair point dalam mengenali warna dari sensor TCS3200 sangat baik mencapai 93,75 % dan tingkat kesalahannya hanya 6,25 %.
Kata Kunci : Algoritma closest pair point, Sensor Warna, TAOSTM TCS3200D, DT Sense Color.
Abstract
TCS3200 color sensor has several advantages, namely: inexpensive, accurate, and can be applied in various fields. Many research that use color sensor TCS3200 but no research have discussed yet the algorithms that is used in the comparison of the data results. This research was used closest pair point algorithm for comparing the data from TCS3200 color sensor readings. This algorithm can not be directly applied to the comparison of RGB from TCS3200 color sensor readings, it is necessary for improving the algorithm. Closest pair point algorithm improving is done by changing the x and y components to the RGB components. From the research it can be concluded the closest pair point algorithm can be improving to compare the data from TCS3200 color sensor readings, the success rate of the closest pair point algorithm to recognize the TCS3200 color sensor is very good reach 93.75% and the error rate is only 6.25%.
Keywords: Closest pair point algorithm, Color sensor, TAOSTM TCS3200D, DT Sense Color.
Pendahuluan
TCS3200 merupakan sensor warna murah yang sangat berguna, yang dengan kalibrasi lebih lanjut dapat memberikan pembacaan Red, Green, dan Blue (RGB) yang akurat. [7] Sensor warna TCS 3200 adalah sensor warna buatan TAOS Parralax. TCS3200 adalah produk penyempurnaan dari produk sebelumnya yaitu TCS 230. Perbedaan antara TCS 3200 dan TCS 230 adalah konsumsi arusnya.[10][11]
Banyak penelitian mengenai sensor warna menggunakan TCS3200. M Seelye, et al. (2011) merancang robot otomatis yang dilengkapi dengan sensor warna TCS3200 untuk memonitor pertumbuhan tanaman di laboratorium. Hasil percobaan menunjukkan bahwa
1 Dosen Program Studi Teknik Informatika, STMIK Potensi Utama
TCS3200 adalah sensor warna murah yang sangat berguna, dengan kalibrasi lebih lanjut dapat memberikan pembacaan RGB yang akurat. TCS3200 dapat diintegrasikan dengan lengan robot, sehingga dapat memonitor dan mengendalikan pertumbuhan tanaman secara otomatis. [5][7]
Arko Djajadi, et al, (2010) memanfaatkan pengolahan citra untuk peningkatan kinerja sistem persortiran yang telah ada di laboratorium Modular Processing Station (MPS) yang menggunakan kombinasi sensor kapasitif, induktif dan optis untuk membedakan warna benda. Sistem menggunakan sebuah mekatronik robot (Mitsubishi Movemaster RV-M1) untuk pengelompokan warna dengan penerapan pengolahan citra, dengan melakukan serangkaian gerakan dengan mekanisme penempatan ambil-dan-taruh sesuai warna dan posisi dari benda kerja.[1]
Tri wiguno ro’uf (2008) menggunakan Sensor Warna Tcs 230 Untuk Mengukur Kadar Sukrosa Dalam Madu. Pada penelitiannya Tri wiguno menggunakan LED sebagai sumber cahaya, dimana cahaya dari LED setelah melewati sampel akan diterima oleh sensor warna TCS 230. Ada dua komponen utama pembentuk IC ini, yaitu photodioda dan pengkonversi arus ke frekuensi. Hasil keluaran dari sensor warna TCS 230 diterima oleh MCU ATmega 8535 yang berfungsi sebagai pengolah data kemudian ditampilkan pada LCD berupa nilai dalam persen.[9].
Andhika rendy pratama dan Ratna adil (2010) mendesain mekanik alat bantu untuk identifikasi kualiatas susu cair dan sari buah dengan sensor warna TCS 3200. Pada penelitiannya Andhika menggunakan sampel produk yang masih asli belum diberi tambahan bahan pengawet.[8]
Dari penelitian – penelitian yang telah dijelaskan sebelumnya, menunjukkan bahwa sensor warna TCS3200 ini memiliki beberapa kelebihan, yaitu: murah, akurat, dan dapat diaplikasikan di berbagai bidang. Karena banyak penelitian yang menggunakan sensor warna TCS3200 dan belum ada penelitian yang membahas mengenai algoritma yang digunakan pada proses perbandingan data hasil sensornya, maka pada penelitian ini, penulis akan menganalisa algoritma yang digunakan pada proses perbandingan data hasil pembacaan sensor warna TCS3200. Algoritma yang digunakan adalah algoritma closest pair point. Algoritma closest pair point adalah suatu algoritma yang memecahkan persoalan untuk mencari jarak terdekat antara kumpulan titik dalam suatu bidang dua dimensi.
Sensor Warna
DT Sense Color yang merupakan modul sensor warna berbasis sensor TAOSTM TCS3200D yang dapat mengenali/mendeteksi warna RGB dari sebuah benda/obyek.
Gambar TAOSTM TCS3200D dan diagram proses sensor ditunjukkan pada gambar 1. [4][7]
(a) (b)
Gambar 1. (a) Parallax TCS3200 colour sensor (b) Diagram proses sensor
DT-SENSE Color Sensor memiliki spesifikasi sebagai berikut:[4][11] Mampu mengukur komponen warna RGB dari sebuah objek berwarna. Berbasis sensor TAOS TCS3200D.
Tersedia 2 LED putih untuk membantu pembacaan data warna pada obyek.
Dilengkapi dengan antarmuka UART TTL dan I2C.
Konfigurasi komunikasi serial adalah : baudrate 9600 bps, 8 data bit, 1 stop bit, tanpa parity, dan tanpa flow control.
Sumber catu daya menggunakan tegangan 4,8 - 5,4 VDC. Antarmuka I2C mendukung bit rate data hingga 50 kHz.
DT-SENSE Color Sensor memiliki antarmuka UART TTL dan I2C yang dapat digunakan untuk menerima perintah atau mengirim data.[6]
Antarmuka UART TTL
Parameter komunikasi UART TTL adalah sebagai berikut: • 9600 bps
• 8 data bit • 1 stop bit • tanpa parity bit • tanpa flow control
Semua perintah yang dikirim melalui antarmuka UART TTL dimulai dengan mengirim 1 byte data yang berisi <nomor perintah> dan 1 byte data parameter perintah.
Jika perintah yang telah dikirimkan merupakan perintah yang meminta data dari modul DT-SENSE Color Sensor, maka DT-SENSE Color Sensor akan mengirimkan data melalui jalur TX TTL.[6]
Antarmuka I2C
DT-SENSE Color Sensor memiliki antarmuka I2C. Pada antarmuka I2C ini, DT-SENSE Color Sensor bertindak sebagai slave dengan alamat sesuai dengan pengaturan jumper yang ada. Antarmuka I2C pada DT-Sense Color Sensor mendukung bit rate sampai dengan maksimum 50 kHz.
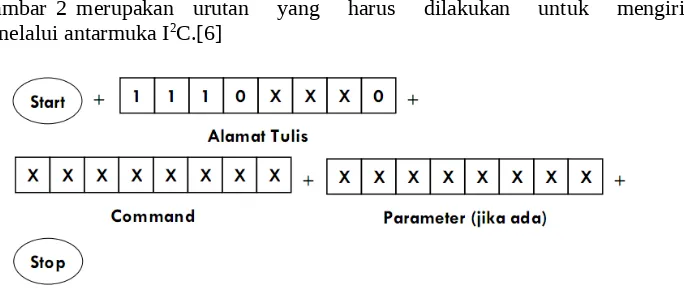
Semua perintah yang dikirim melalui antarmuka I2C diawali dengan start condition dan kemudian diikuti dengan pengiriman 1 byte alamat DT-SENSE Color Sensor. Setelah pengiriman alamat, master harus mengirim 1 byte data yang berisi <nomor perintah> dan 1 byte data parameter perintah. Setelah seluruh parameter perintah dikirim, urutan perintah diakhiri dengan stop condition.
Gambar 2 merupakan urutan yang harus dilakukan untuk mengirimkan perintah melalui antarmuka I2C.[6]
Gambar 2. Urutan pengiriman perintah melalui antarmuka I2C
Gambar 3. Urutan membaca data melalui antarmuka I2C
Gambar 3 menunjukkan bahwa untuk membaca data melalui antarmuka I2C, maka perintah yang dikirim melalui antarmuka I2C diawali dengan start condition dan kemudian diikuti dengan pengiriman 1 byte alamat baca, maka data RGB dapat dibaca pada bit-bit berikutnya, urutan perintah diakhiri dengan stop condition.
Algoritma Closest Pair Point
Algoritma closest pair point adalah suatu algoritma yang memecahkan persoalan untuk mencari jarak terdekat antara kumpulan titik dalam suatu bidang dua dimensi.
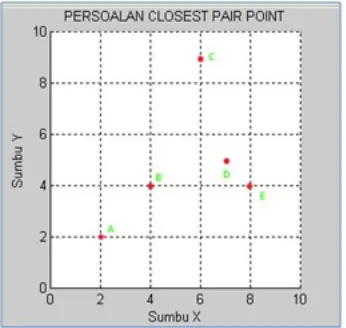
Permasalahan closest pair merupakan salah satu permasalahan klasik dalam dunia matematika diskrit. Secara singkat, deskripsi permasalahan adalah sebagai berikut: diberikan N buah titik yang terletak pada bidang planar 2 dimensi, tentukanlah dua buah titik yang memiliki jarak paling dekat.[3]
Gambar 4. Ilustrasi permasalahan closest pair
Cara yang paling sederhana untuk memecahkan masalah ini adalah dengan membandingkan semua kemungkinan titik-titiknya untuk dicari jaraknya. Untuk menentukan jarak antar titik digunakan persamaan 1.
22 1 2 2
1 x y y
x
d (1)
Dimana x dan y adalah koordinat masing-masing titik yang diperbandingkan. Algoritma akan mencoba semua kemungkinan titik hingga didapatkan nilai d yang paling kecil.
A Sutariya, K Amin (2013) menyajikan perbaikan algoritma k-means yang menggabungkan metode sistematis untuk menemukan centroid awal dan cara yang efisien untuk menempatkan titik data pada cluster. Mereka menggunakan persamaan 2 untuk menghitung jarak antara vector X = (x1 , x2 ….. xn) dan vector lain Y = (y1 , y2 ….. yn).[2]
2
22 2 2 1
1 ...
) ,
(x y x y x y xn yn
d (2)
Dari persamaan 1 dan persamaan 2, penulis mencoba mengembangkan persamaan 1 dengan menngunakan analogi dari persamaan 2, diperoleh persamaan 3.
Rd Ri
2
Gd Gi
2
Bd Bi
2d (3)
Dimana :
d = nilai closest pair point Rd = nilai Red pada database Ri = nilai Red input
Gd = nilai Green pada database Gi = nilai Green input
Bd = nilai Blue pada database Bi = nilai Blue input
Flowchart
Gambar 5. Diagram Alir Proses perbandingan data warna RGB yang dibaca dengan database warna RGB
dengan database warna RGB (Rd, Gd,Bd) dengan menggunakan algoritma closest pair point sampai alamat penyimpanan data RGB terakhir. Program akan menampilkan alamat dari nilai closest pair point (d) terkecil dan nilai warna RGB benda input.
Hasil Dan Analisa
Dalam penelitian ini, langkah pertama yaitu dilakukan proses penyimpanan database warna RGB (warna RGB pembanding), kemudian disimpan dalam memori (Electrically Erasable Programmable Read-Only Memory
)
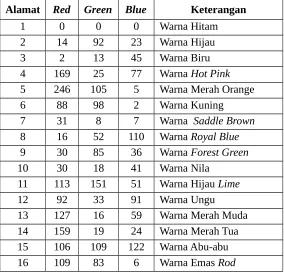
EEPROM pada alamat tertentu secara berurutan. Data yang diperoleh dapat dilihat pada tabel 1.Tabel 1. Database warna RGB pembanding
Alamat Red Green Blue Keterangan
1 0 0 0 Warna Hitam
2 14 92 23 Warna Hijau
3 2 13 45 Warna Biru
4 169 25 77 Warna Hot Pink 5 246 105 5 Warna Merah Orange
6 88 98 2 Warna Kuning
7 31 8 7 Warna Saddle Brown 8 16 52 110 Warna Royal Blue 9 30 85 36 Warna Forest Green 10 30 18 41 Warna Nila
11 113 151 51 Warna Hijau Lime
12 92 33 91 Warna Ungu
13 127 16 59 Warna Merah Muda 14 159 19 24 Warna Merah Tua 15 106 109 122 Warna Abu-abu 16 109 83 6 Warna Emas Rod
Proses berikutnya adalah membaca benda dengan warna RGB tertentu (RGB input), kemudian membandingkan warna RGB yang dibaca (RGB input) dengan database warna RGB pembanding menggunakan algoritma closest pair point.
Pengujian : Benda input berwarna hijau dengan RGB adalah R=14, G=99, dan B=24. Database warna RGB pembanding dapat dilihat pada tabel 1.
Dengan menggunakan persamaan 3 akan dicari nilai closest pair point.
Rd Ri
2
Gd Gi
2
Bd Bi
2d
RGB input dibandingkan dengan Database RGB pembanding pada alamat 1.
0 14
2
0 99
2
0 24
2Selanjutnya RGB input dibandingkan dengan Database RGB pembanding pada alamat 2.
14 14
2
92 99
2
23 24
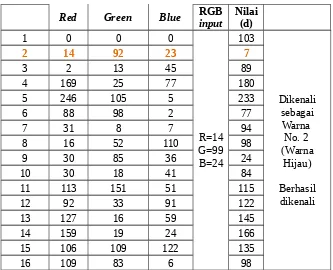
2Hasil perbandingan RGB input dengan Database RGB pembanding ditunjukkan pada tabel 2. Tabel 2. Hasil perbandingan RGB input (R=14, G=99, B=24)dengan Database
RGB
RGB
Pada tabel 2 dapat dilihat bahwa nilai d terkecil (closest pair point) adalah 7, yang merupakan hasil dari perbandingan RGB input dengan RGB pada alamat 2. Dengan demikian RGB input dikenali sebagai warna no. 2 yaitu warna hijau. Warna ini sesuai dengan warna benda yang menjadi input, dengan kata lain, algoritma closest pair point dapat mengenali input dengan baik (sukses mengenali input).
Tabel 3. Hasil perbandingan RGB input (R=2, G=14, B=45)dengan Database
RGB
Alamat Database RGB Pembanding RGB
RGB input dikenali sebagai warna no. 3 yaitu warna biru. Warna ini sesuai dengan warna benda yang menjadi input.
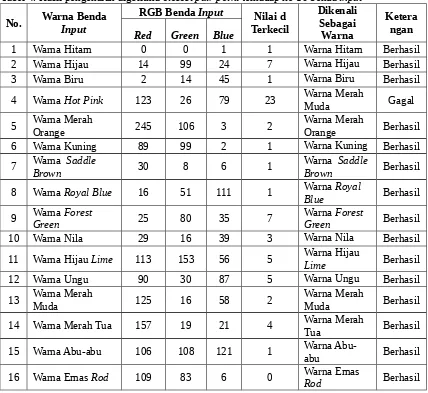
Pengujian dilanjutkan dengan memasukkan benda input yang berbeda – beda sebanyak 16 warna, dan dilihat tingkat keberhasilan algoritma closest pair point dalam mengenalinya. Hasil pengenalan algoritma closest pair point terhadap ke-16 benda input yang berbeda – beda ditunjukkan pada tabel 4.
Tabel 4. Hasil pengenalan algoritma closest pair point terhadap ke-16 benda input
No. Warna Benda
1 Warna Hitam 0 0 1 1 Warna Hitam Berhasil
2 Warna Hijau 14 99 24 7 Warna Hijau Berhasil
3 Warna Biru 2 14 45 1 Warna Biru Berhasil
4 Warna Hot Pink 123 26 79 23 Warna Merah Muda Gagal
5 Warna Merah Orange 245 106 3 2 Warna Merah Orange Berhasil
6 Warna Kuning 89 99 2 1 Warna Kuning Berhasil
7 Warna Saddle Brown 30 8 6 1 Warna SaddleBrown Berhasil
8 Warna Royal Blue 16 51 111 1 Warna Royal
Blue Berhasil 9 Warna Forest
Green 25 80 35 7
Warna Forest
Green Berhasil
10 Warna Nila 29 16 39 3 Warna Nila Berhasil
11 Warna Hijau Lime 113 153 56 5 Warna Hijau
Lime Berhasil
12 Warna Ungu 90 30 87 5 Warna Ungu Berhasil
13 Warna Merah Muda 125 16 58 2 Warna Merah Muda Berhasil
14 Warna Merah Tua 157 19 21 4 Warna Merah
Tua Berhasil
15 Warna Abu-abu 106 108 121 1 Warna
Abu-abu Berhasil
16 Warna Emas Rod 109 83 6 0 Warna Emas Rod Berhasil
Pada tabel 4 dapat dilihat bahwa dari ke-16 benda berwarna RGB yang menjadi input, hanya ada 1 benda yang gagal dikenali, yaitu warna hot pink dikenali sebagai warna merah muda. Hal ini menunjukkan bahwa tingkat keberhasilan algoritma closest pair point dalam mengenali warna dari sensor TCS3200 sangat baik mencapai 15/16 x 100 % = 93,75 %. Sedangkan tingkat kesalahannya hanya 1/16 x 100 % = 6,25 %.
Kesimpulan
Berdasarkan percobaan yang dilakukan dan hasil yang didapat, maka dapat diperoleh kesimpulan sebagai berikut :
1. Algoritma closest pair point dapat dikembangkan untuk membandingkan data hasil pembacaan sensor warna TCS3200.
3. Tingkat kesalahan algoritma closest pair point dalam mengenali warna dari sensor TCS3200 hanya 6,25 %.
Daftar Pustaka
1. A Djajadi, F Laoda, R Rusyadi, T Prajogo, A model vision of sorting system application using robotic manipulator, TELKOMNIKA Vol. 8 No. 2 Augustus 2010 http://telkomnika.ee.uad.ac.id/n9/files/Vol.8No.2Agt10/8.2.8.10.09.pdf
2. A Sutariya, K Amin, An Improvement in K-means Clustering Algorithm, Vol. 2 Issue 1, International Journal of Engineering, January- 2013, - ijert.org
http://www.ijert.org/browse/volume-2-2013/january-2013-edition?
download=2219%3Aan-improvement-in-k-means-clustering-algorithm&start=200
3. Danutama. Karol, Penyelesaian Masalah Closest Pair dengan Algoritma Divide and Conquer, Makalah IF3051, ITB, Bandung, 2011.
http://informatika.stei.itb.ac.id/~rinaldi.munir/Stmik/2010-2011/Makalah2010/MakalahStima2010-055.pdf
4. F Yucel, O Oral, N Caglayan, M Tecimen, Design and Implementation of a Personal Computer Authorization System using Color Detection, 2011 - socsc.ktu.lt http://socsc.ktu.lt/index.php/elt/article/download/758/969
5. GS Gupta, M Seelye, J Seelye, D Bailey, Autonomous Anthropomorphic Robotic System with Low-Cost Colour Sensors to Monitor Plant Growth in a Laboratory, 2011 - cdn.intechweb.org http://cdn.intechweb.org/pdfs/27407.pdf
6. Manual DT-SENSE Color Sensor, Innovative Electronic, 2010.
http://www.innovativeelectronics.com/innovative_electronics/downlo ad_files/manual/DT-SENSE_Color_Sensor/Manual%20DT-Sense
%20Color%20Sensor.pdf
7. M Seelye, GS Gupta, D Bailey, Low Cost Colour Sensors for Monitoring Plant Growth in a Laboratory, (I2MTC), 2011 IEEE, 2011 - ieeexplore.ieee.org
http://sprg.massey.ac.nz/pdfs/2011_IMTC_.pdf
8. Pratama, Andhika Rendy dan Adil, Ratna, Desain Mekanik Alat Bantu Untuk Identifikasi Kualiatas Susu Cair dan Sari Buah dengan Sensor Warna TCS 3200, 2010 http://repo.eepis-its.edu/274/1/7107030035_m.pdf
9. Wiguno Ro’uf, Tri, Aplikasi Sensor Warna Tcs 230 Untuk Mengukur Kadar Sukrosa Dalam Madu. Other thesis, University of Muhammadiyah Malang, 2008. http://eprints.umm.ac.id/7015/1/APLIKASI_SENSOR_WARNA_TCS_230.pdf
10.
http://pdf1.alldatasheet.com/datasheet-pdf/view/202765/TAOS/TCS230/+Q03JJJVRvxybUGVNvt+/datasheet.pdf
![Gambar TAOSTM TCS3200D dan diagram proses sensor ditunjukkan pada gambar 1. [4][7]](https://thumb-ap.123doks.com/thumbv2/123dok/2779890.1684066/2.595.91.503.556.659/gambar-taostm-tcs-diagram-proses-sensor-ditunjukkan-gambar.webp)