Informasi Dokumen
- Penulis:
- Febrian Wijoseno
- Adit Kurniawan
- Arwin Datumaya Wahyudi Sumari
- Pengajar:
- Mashury Wahab
- Asep Yudi Hercuadi
- A.A. Lestari
- A.B. Suksmono
- Yuyu Wahyu
- Pamungkas Daud
- Sekolah: Sekolah Tinggi Elektro dan Informatika, Institut Teknologi Bandung
- Mata Pelajaran: Teknik Elektro
- Topik: Penyelidikan Pemanfaatan Teknologi Seluler Sebagai Passive Radar
- Tipe: prosiding
- Tahun: 2009
- Kota: Bandung
Ringkasan Dokumen
I. TINJAUAN PEMANFAATAN TEKNOLOGI SELULER UNTUK DIAPLIKASIKAN SEBAGAI PASSIVE RADAR
Tulisan ini membahas tentang tinjauan pemanfaatan teknologi seluler diaplikasikan sebagai passive radar untuk mendeteksi pesawat terbang. Pemodelan ini memerlukan beberapa asumsi dasar seperti model propagasi dan penggunaan sinyal pilot pada WCDMA. Cellular radar ini bekerja berdasarkan prinsip radar konvensional dengan deteksi oleh cellular yang memanfaatkan proses sinkronisasi sinyal.
1.1 PENDAHULUAN
TNI AU memiliki tugas pokok menjaga kedaulatan negara di udara. Dengan kondisi geografis Indonesia yang luas, diperlukan unsur pertahanan udara yang siap. Radar berfungsi sebagai early warning dan ground interceptor. Namun, banyak daerah di Indonesia bagian timur yang belum terlindungi radar, sehingga perlu alternatif seperti passive radar.
1.2 DASAR TEORI
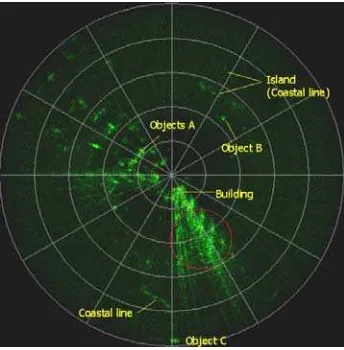
Radar adalah peralatan elektronik yang dapat mendeteksi posisi obyek di udara. Passive radar memanfaatkan iluminasi dari sumber lain untuk mendeteksi target. Teknologi ini menggunakan infrastruktur yang ada dan sistem penerima sinyal untuk mengolah informasi target.
1.3 CELLULAR RADAR
Passive radar yang menggunakan sinyal seluler dikenal sebagai cellular radar. Teknologi ini memungkinkan deteksi target yang bergerak cepat secara real time dengan biaya relatif murah. Cellular radar memanfaatkan BTS yang sudah menjangkau daerah pelosok yang tidak tertangkap radar TNI-AU.
II. ANALISA FDOA-RADAR SEKUNDER TERHADAP GANGGUAN RANDOM NOISE
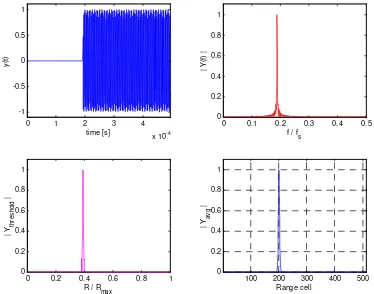
Tulisan ini membahas analisa pengaruh random noise terhadap akurasi pengukuran jarak pada radar sekunder menggunakan metode FDOA. Hasil simulasi menunjukkan bahwa metode FDOA sangat handal terhadap gangguan noise hingga SNR 0.33.
2.1 PENDAHULUAN
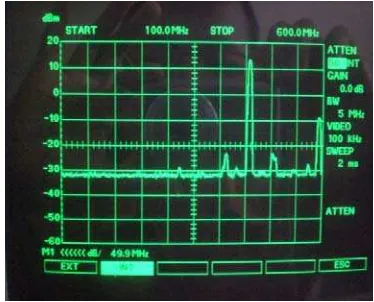
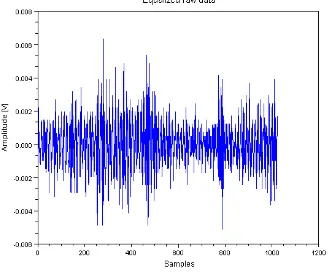
LAPAN mengembangkan sistem RADAR sekunder untuk melacak peluncuran roket. Sistem ini menggunakan frekuensi UHF dan sub-carrier untuk mendeteksi delay waktu dan jarak roket. Penambahan random noise hingga SNR 0.33 diuji untuk menganalisa akurasi pengukuran.
2.2 FDOA RADAR SEKUNDER
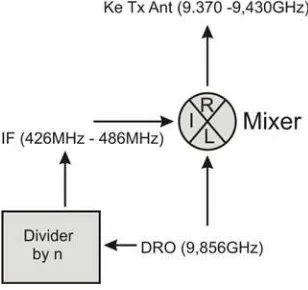
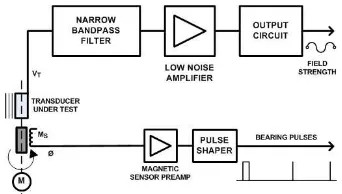
Sistem RADAR sekunder terdiri dari transmitter dan receiver. Transponder pada muatan roket berfungsi memantulkan sinyal radio yang diterima. Delay sinyal diukur dari perbedaan frekuensi antara sinyal yang dikirim dan yang dipantulkan.
2.3 HASIL ANALISA
Hasil analisa menunjukkan bahwa akurasi pengukuran jarak meningkat dengan bandwidth yang lebih lebar. Penambahan random noise hingga SNR 0.33 masih dapat mengukur dengan baik, menunjukkan bahwa metode FDOA cocok untuk aplikasi radar sekunder.
III. SISTEM IDENTIFIKASI PESAWAT MENGGUNAKAN KECEPATAN DAN RADAR CROSS SECTION PESAWAT BERBASIS JARINGAN SYARAF TIRUAN BACKPROPAGATION
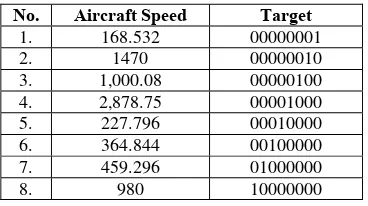
Radar digunakan untuk mendeteksi dan mengidentifikasi pesawat terbang. Makalah ini membahas desain sistem identifikasi berbasis jaringan syaraf tiruan backpropagation menggunakan data kecepatan dan RCS sebagai parameter identifikasi.
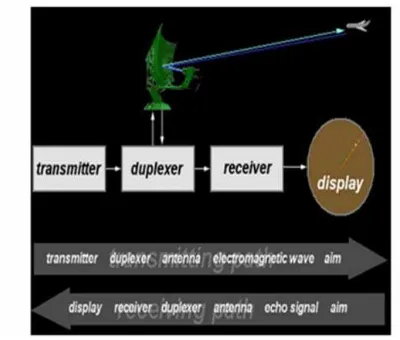
3.1 KONTEKS TEKNOLOGI RADAR
Radar berfungsi untuk mendeteksi posisi, jarak, dan kecepatan pesawat terbang. Teknologi radar memanfaatkan pemantulan gelombang elektromagnetik dan efek Doppler untuk mengidentifikasi objek yang bergerak.
3.2 JARINGAN SYARAF TIRUAN
Jaringan Syaraf Tiruan (JST) meniru kemampuan sel-sel syaraf manusia dalam mengolah data. JST terdiri dari neuron-neuron yang berfungsi untuk memproses informasi, dengan pelatihan untuk menyesuaikan bobot antar neuron.
3.3 HASIL PELATIHAN
Hasil pelatihan JST menunjukkan bahwa sistem identifikasi dapat mencapai kesalahan minimal dalam pengenalan jenis pesawat. Validasi dilakukan dengan menggunakan data kecepatan dan RCS untuk memastikan akurasi sistem.
IV. KESIMPULAN
Seminar ini menyimpulkan bahwa teknologi radar dan jaringan syaraf tiruan dapat dimanfaatkan untuk meningkatkan sistem identifikasi pesawat. Penelitian lebih lanjut diperlukan untuk mengoptimalkan aplikasi radar dalam konteks pertahanan.
Referensi Dokumen
- Adaptive Antenna for Ground Penetrating Radar ( A.A. Lestari, A.G. Yarovoy, L. P. Ligthart )
- Ground Penetrating Radar 2nd edition ( D.J. Daniels )
- A study of pulse radiation from several broad-band loaded monopoles ( TP. Montoya, G.S. Smith )
- Rolled Dipole Antenna for Low-resolution GPR ( A.A. Lestari, D. Yulian, A.B. Sukmono, E. Bharata, A.G. Yarovoy, and L.P. Ligthart )
- RC loaded bow-tie antenna for improved pulse radiation ( A.A. Lestari, A.G. Yarovoy, L.P. Ligthart )