5 2.1 Mikrokontroller
Mikrokontroller merupakan suatu komponen elektronika berupa chip atau IC digital dimana didalamnya terdapat rangkaian mikroprosesor, memori (RAM/ROM) dan port input/output (I/O).
Sebuah mikrokontroller dapat bekerja dengan cara memberi atau memasukkan program yang berisi instruksi-instruksi yang dapat digunakan untuk menjalankan sistem mikrokontroller tersebut. Banyak sedikitnya instruksi program ini disesuaikan dengan aplikasi yang akan dirancang. Semakin kompleks aplikasinya, maka semakin banyak instruksi yang diberikan dan semakin besar memori yang digunakan untuk mengeksekusi aplikasi yang diinginkan.
Oleh karenanya mikrokontroller dapat di program berulang-ulang dan dapat digunakan untuk mengolah data pada aplikasi-aplikasi kontrol otomasi sederhana.
2.1.1 Mikrokontroller AVR ATmega128
ATmega 128 adalah salah satu mikrokontroller dari keluarga AVR yang menggunakan teknologi RISC (Reduce Instruction Set Computing) dimana program berjalan lebih cepat karena hanya membutuhkan satu siklus clock untuk mengeksekusi satu instruksi program. Semua jenis AVR dilengkapi dengan flash memori sebagai memori program dimana ATmega 128 sendiri mempunyai kapasitas flash memori 128 Kb, sebuah kapasitas yg merupakan terbesar untuk sebuah mikrokontroller di kelasnya.
Mikrokontroller AVR Atmega128 memiliki fitur yang cukup lengkap, diantaranya :
2. CPU yang terdiri atas 32 buah register.
3. Memori Flash sebesar 128 Kb dengan kemampuan Read / Write. 4. SRAM Internal sebesar 4Kb.
5. EEPROM sebesar 4Kb.
6. Dua buah 8-bit Timer/Counter dengan kemampuan pembandingan dan Prescaler terpisah.
7. Dua buah 16-bit Timer/Counter dengan kemampuan pembanding, Prescaler terpisah.
8. Dua buah 8-bit saluran PWM. 9. Dua buah 8-bit PWM Channel. 10. ADC internal 10-bit, 8 Channel. 11. Port USART untuk komunikasi serial. 12. Port antarmuka komparator analog. 13. Real time counter.
14. Port I/O sebanyak 53 buah, yaitu: port A, port B, port C, port D, Port E, port F dan port G.
15. Tegangan operasi sampai dengan 5,5 V
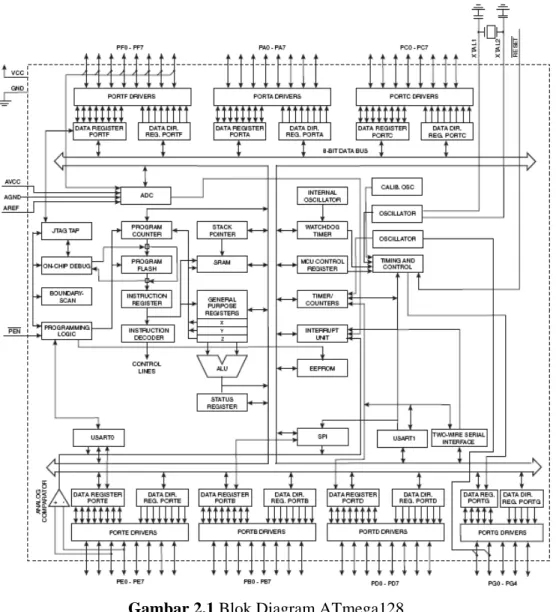
2.1.2 Arsitektur Atmega128
Mikrokontroler ATmega128 memiliki 2 buah memori utama, yaitu memori program dan memori data serta 1 buah memori tambahan, yaitu memori EEPROM. Ketiganya memiliki ruang sendiri dan terpisah.
a. Memori program
b. Memori data
Dalam konfigurasi normal, ATmega128 memiliki kapasitas memori data sebesar 4096 byte yang terbagi menjadi 3 bagian yaitu register serba guna, register I/O, I/O tambahan dan SRAM. Atmega128 memiliki 32 byte register serba guna, 64 byte register I/O, 160 byte I/O tambahan yang dapat diakses sebagai bagian dari memori SRAM (menggunakan instuksi LD atau ST) atau dapat juga diakses sebagai I/O (menggunakan instruksi IN atau OUT), dan 4096 byte digunakan untuk memori data SRAM.
c. Memori EEPROM
Gambar 2.1 Blok Diagram ATmega128
terpisah (AVCC), dimana besarnya AVCC ini tidak boleh melebihi + 0,3 V dari tegangan kerja (VCC).
Atmega128 memiliki 4 modul timer yang terdiri dari 2 buah timer/counter 8 bit dan 2 buah timer/counter 16 bit. Keempat modul timer/counter ini dapat diatur dalam mode yang berbeda secara individu dan tidak saling mempengaruhi satu sama lain. Selain itu, semua timer/counter juga dapat difungsikan sebagai sumber interupsi. Masing-masing timer/counter ini memiliki register tertentu yang digunakan untuk mengatur mode dan cara kerjanya.
Serial Peripheral Interface (SPI) merupakan salah satu mode komunikasi serial syncrhronous kecepatan tinggi yang dimiliki oleh Atmega128. Universal Syncrhronous and Asyncrhronous Serial Receiver and Transmitter (USART) juga merupakan salah satu mode komunikasi serial yang dimiliki oleh Atmega128. USART merupakan komunikasi yang memiliki fleksibilitas tinggi, yang dapat digunakan untuk melakukan transfer data baik antar mikrokontroler maupun dengan modul-modul eksternal termasuk PC yang memiliki fitur UART.
USART memungkinkan transmisi data baik secara syncrhronous maupun asyncrhronous, sehingga dengan memiliki USART pasti kompatibel dengan UART. Pada Atmega128, secara umum pengaturan mode syncrhronous maupun asyncrhronous adalah sama. Perbedaannya hanyalah terletak pada sumber clock saja.
2.1.3 Konfigurasi Pin Atmega128
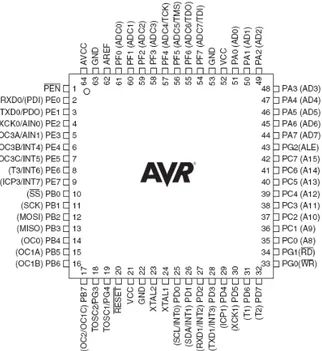
Konfigurasi pin Atmega128 dapat dilihat pada Gambar 2.2 di bawah ini.
Gambar 2.2 Pin Atmega128
Dari gambar di atas dapat dijelaskan fungsi dari masing-masing pin Atmega128 sebagai berikut:
1. VCC merupakan pin yang berfungsi sebagai masukan catu daya / sumber tegangan.
2. AVCC merupakan pin yang berfungsi sebagai masukan catu daya / sumber tegangan untuk analog (masukan analog maupun ADC).
3. GND merupakan pin Ground.
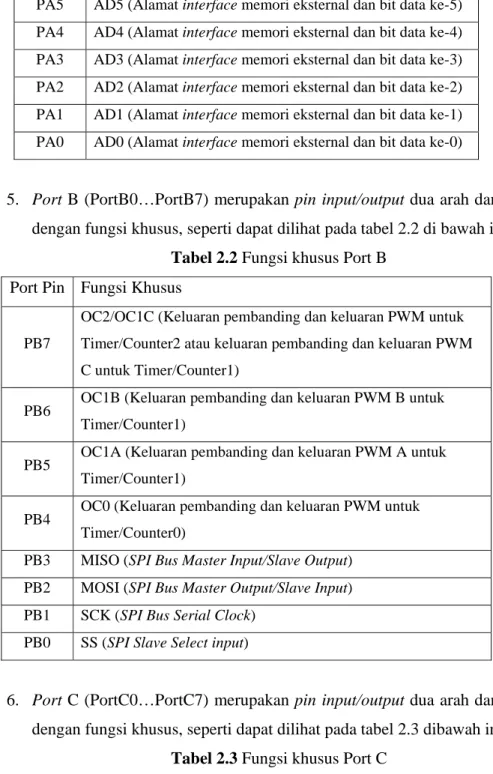
4. Port A (PortA0…PortA7) merupakan pin input/output dua arah dan pin dengan fungsi khusus, seperti dapat dilihat pada tabel 2.1 di bawah ini.
Tabel 2.1 Fungsi khusus Port A Port Pin Fungsi Khusus
PA7 AD7 (Alamat interface memori eksternal dan bit data ke-7)
PA5 AD5 (Alamat interface memori eksternal dan bit data ke-5)
PA4 AD4 (Alamat interface memori eksternal dan bit data ke-4)
PA3 AD3 (Alamat interface memori eksternal dan bit data ke-3)
PA2 AD2 (Alamat interface memori eksternal dan bit data ke-2)
PA1 AD1 (Alamat interface memori eksternal dan bit data ke-1)
PA0 AD0 (Alamat interface memori eksternal dan bit data ke-0)
5. Port B (PortB0…PortB7) merupakan pin input/output dua arah dan pin dengan fungsi khusus, seperti dapat dilihat pada tabel 2.2 di bawah ini.
Tabel 2.2 Fungsi khusus Port B Port Pin Fungsi Khusus
PB7
OC2/OC1C (Keluaran pembanding dan keluaran PWM untuk Timer/Counter2 atau keluaran pembanding dan keluaran PWM C untuk Timer/Counter1)
PB6 OC1B (Keluaran pembanding dan keluaran PWM B untuk Timer/Counter1)
PB5 OC1A (Keluaran pembanding dan keluaran PWM A untuk Timer/Counter1)
PB4 OC0 (Keluaran pembanding dan keluaran PWM untuk Timer/Counter0)
PB3 MISO (SPI Bus Master Input/Slave Output) PB2 MOSI (SPI Bus Master Output/Slave Input) PB1 SCK (SPI Bus Serial Clock)
PB0 SS (SPI Slave Select input)
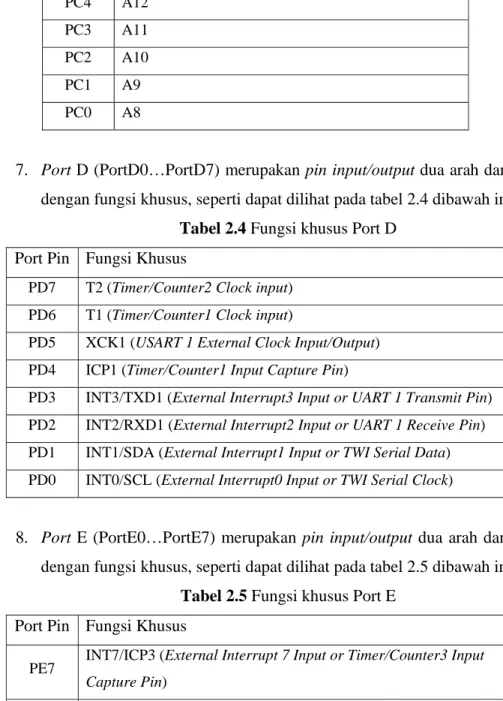
6. Port C (PortC0…PortC7) merupakan pin input/output dua arah dan pin dengan fungsi khusus, seperti dapat dilihat pada tabel 2.3 dibawah ini.
Tabel 2.3 Fungsi khusus Port C Port Pin Fungsi Khusus
PC4 A12 PC3 A11 PC2 A10 PC1 A9 PC0 A8
7. Port D (PortD0…PortD7) merupakan pin input/output dua arah dan pin dengan fungsi khusus, seperti dapat dilihat pada tabel 2.4 dibawah ini.
Tabel 2.4 Fungsi khusus Port D Port Pin Fungsi Khusus
PD7 T2 (Timer/Counter2 Clock input) PD6 T1 (Timer/Counter1 Clock input)
PD5 XCK1 (USART 1 External Clock Input/Output) PD4 ICP1 (Timer/Counter1 Input Capture Pin)
PD3 INT3/TXD1 (External Interrupt3 Input or UART 1 Transmit Pin) PD2 INT2/RXD1 (External Interrupt2 Input or UART 1 Receive Pin) PD1 INT1/SDA (External Interrupt1 Input or TWI Serial Data) PD0 INT0/SCL (External Interrupt0 Input or TWI Serial Clock)
8. Port E (PortE0…PortE7) merupakan pin input/output dua arah dan pin dengan fungsi khusus, seperti dapat dilihat pada tabel 2.5 dibawah ini.
Tabel 2.5 Fungsi khusus Port E Port Pin Fungsi Khusus
PE7 INT7/ICP3 (External Interrupt 7 Input or Timer/Counter3 Input
Capture Pin)
PE6 INT6/T3 (External Interrupt 6 Input or Timer/Counter3 Clock
Input)
PE5 INT5/OC3C (External Interrupt 5 Input or Output Compare and
PWM Output C for Timer/Counter3)
PE4 INT4/OC3B (External Interrupt 4 Input or Output Compare and
PWM Output B for Timer/Counter3)
Compare and PWM Output A for Timer/Counter3)
PE2 AIN0/XCK0 (Analog Comparator Positive Input or USART 0
External Clock Input/Output)
PE1 PDO/TXD0 (Programming Data Output or UART 0Transmit
Pin)
PE0 PDI/RXD0 (Programming Data Input or UART 0 Receive Pin)
9. Port F (PortF0…PortF7) merupakan pin masukan analog untuk ADC. 10. Port G (PortG0…PortG4) merupakan pin input/output dua arah.
11. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler. 12. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
13. AVCC merupakan pin sumber tegangan untuk masukan analog dan ADC.
14. AREFF merupakan pin referensi analog untuk ADC.
15. PEN merupakan pin untuk mengaktifkan pemrograman mode SPI (Serial).
2.2 RFID
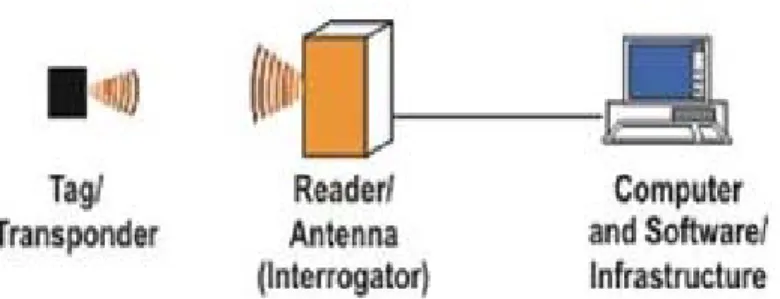
RFID (Radio Frequency Identification) atau yang biasa disebut Identifikasi Frekuensi Radio merupakan suatu teknologi identifikasi otomatis untuk mengidentifikasi objek dengan menggunakan gelombang radio. Kelebihan dari teknologi ini dibanding teknologi identifikasi lainnya adalah tidak diperlukannya kontak langsung maupun kesejajaran posisi saat pembacaan antara detektor (reader) dengan objek yang akan diidentifikasi. Sebuah data RFID dapat dengan mudah dibaca melalui pakaian, tubuh manusia dan bahan-bahan non logam.
kompatibel, tag akan mentransmisikan informasi yang ada pada tag kepada pembaca RFID, sehingga proses identifikasi objek dapat dilakukan.
Gambar 2.3 Prinsip kerja RFID
Pada gambar 2.3 Antena memancarkan sinyal radio untuk mengaktifkan tag dan untuk membaca dan menulis data ke dalamnya. Pembaca RFID memancarkan gelombang radio dalam rentang jarak mulai dari 1 inci sampai 100 kaki atau lebih, tergantung pada output daya dan frekuensi radio yang digunakan. Ketika suatu RFID tag melewati suatu medan elektromagnetis, mendeteksi sinyal aktivasi pembaca. Pembaca RFID meng-kodekan data yang telah dikodekan oleh sirkuit terpadu dalam tag tersebut (silikon chip) dan kemudian data dikirim ke komputer host untuk diproses dan divalidasi.
2.2.1 RFID Tag
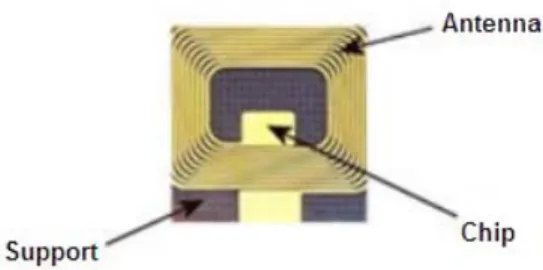
Sebuah tag RFID umumnya terdiri dari sebuah microchip yang melekat ke antena radio dipasang pada substrat/objek. Chip berisi nomor identifikasi unik yang dapat menyimpan data sebanyak 2 kilobyte. Sedangkan antena berupa kumparan atau lilitan kawat tembaga, biasanya datar yang dapat mengirim dan menerima gelombang radio. Secara umum dapat dilihat pada gambar 2.4
Gambar 2.4 RFID Tag
Tag RFID dikelompokkan menjadi tiga, yaitu : a. Tag pasif
Tag pasif tidak memiliki sumber daya internal dan aktif hanya ketika pembaca di dekatkan kepadanya. Antena dalam tag pasif dirancang baik untuk mengumpulkan daya dari sinyal yang masuk dan mengirimkan informasi sendiri kembali ke pembaca. Tergantung pada ukuran dan desain dari antena, jangkauan transmisi tag pasif adalah hanya sampai beberapa meter.
Karena tidak adanya kontrol internal, tag ini bisa berbentuk kecil dan relatif murah untuk diproduksi.
b. Tag aktif
Tag ini juga memiliki lebih banyak ruang memori dalam microchip, sehingga dapat dibaca dengan kecepatan yang lebih tinggi dan - lebih penting - pada jarak yang lebih jauh (hingga ratusan meter). Tag ini jauh lebih mahal untuk memproduksi dan banyak digunakan oleh industri pertahanan, pengiriman dan pertambangan.
c. Tag semi-aktif / semi-pasif
Tag semi-aktif memiliki sumber daya internal hanya untuk memantau kondisi lingkungan, namun memerlukan energi dari pembaca/reader untuk melakukan keperluan komunikasi data. Umumnya, tag jenis ini beroperasi pada kecepatan tinggi dengan jarak yang lebih besar, tetapi memiliki umur yang relatif lebih pendek dari tag lain, sedikit lebih rapuh dan mahal untuk diproduksi.
Gambar 2.5 RFID Tag yang banyak beredar di pasaran
2.2.2 RFID Reader
Untuk mengambil/membaca data yang tersimpan pada tag RFID, diperlukan sebuah pembaca. Sebuah pembaca RF terdiri dari antena dan modul kontrol elektronik yang memancarkan gelombang radio dan membaca sebuah tag terdekat yang ada dalam jangkauan jarak pancar dan menerima informasi yang dikodekan menggunakan komunikasi frekuensi radio dan kemudian melewatkan informasi tersebut ke bentuk digital ke sistem komputer.
buku tersebut telah diperiksa. Seorang pembaca keamanan di pintu keluar kemudian akan menerima informasi ini dari tag untuk memungkinkan bahwa buku ini aman untuk lewat. Contoh lain, adalah pengisian/penulisan pada pembayaran kartu elektrik. Kartu yang sudah disiapkan sebagai tag RF, dituliskan sejumlah nilai melalui pembaca. Jumlah nominal yang disimpan ini nantinya dapat digunakan sebagai alat pembayaran elektrik.
Gambar 2.6 RFID Reader yang banyak beredar di pasaran
2.3 LCD 16x2 (M1632)
Gambar 2.7 LCD M1632
Karakteristik dari LCD dot-matriks adalah sebagai berikut: • 16X2 karakter dengan 5X7 dot matriks+kursor
• ROM generator karakter dengan 8 tipe karakter (untuk program write) • 80X8 bit RAM data display
• Dapat diinterfacekan dengan 4 atau 8 bit MPU
• RAM data dan RAM generator karakter dapat dibaca dari MPU • +5V single power supply
• Power-on reset
• Range temperature operasi 0-60ºC • Beberapa fungsi instruksi:
Display clear, Cursor home, Display ON/OFF, Cursor ON/OFF, Display charackter blink, Cursor Shift dan Display shift.
LCD disini dapat menampilkan karakter yang ada pada ROM generator karakter, yang sudah berisi 192 jenis karakter, dengan cara memberikan kode karakter untuk tiap-tiap karakter yang diinginkan pada pada bus data dengan menggunakan sinyal kontrol.
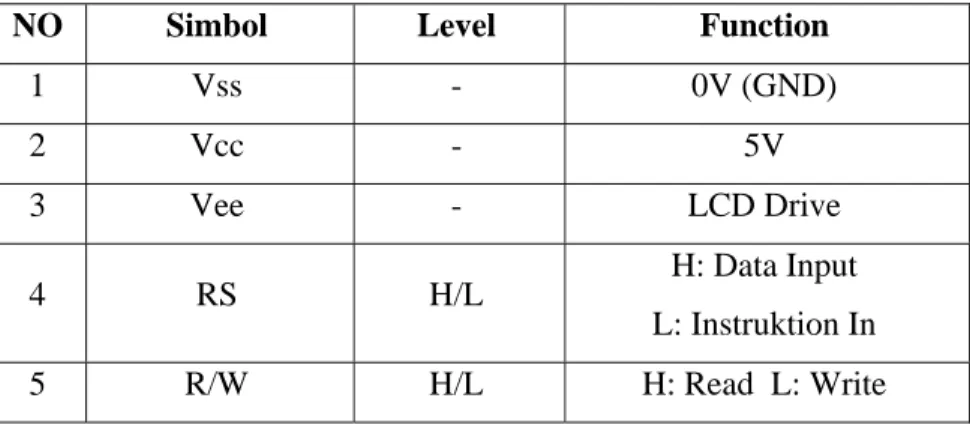
Tabel 2.6 Pin LCD
NO Simbol Level Function
6 E 1/0 Enable Signal 7 DB0 H/L Data Bus 8 DB1 H/L Data Bus 9 DB2 H/L Data Bus 10 DB3 H/L Data Bus 11 DB4 H/L Data Bus 12 DB5 H/L Data Bus 13 DB6 H/L Data Bus 14 DB7 H/L Data Bus 15 V+ BL - Vcc 16 V- BL - GND 2.4 Matriks keypad
Vcc +5V 1 0 1 1 1 0 1 1 B A 7 8 9 F A 0 B C 1 2 3 D 4 5 6 E R.pull-up 10k
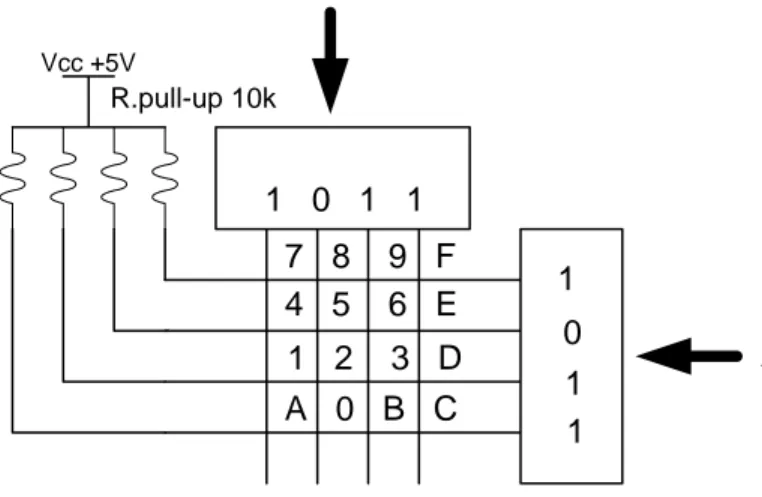
Gambar 2.8 Proses scanning Keypad matriks 4X4
Diumpamakan pin Y1-Y4 sebagai row dan pin X1-X4 sebagai colom. yaitu apabila salah satu pin misalnya Y1 terhubung dengan X1 maka data outnya akan 0 sedangkan untuk Y1 dengan X2 data outnya akan 1. Diumpamakan tombol 5 ditekan, Maka pada proses kerjanya port B dikirim data 0111. Dalam keadaan ini dilakukan pembacaan pada port A dan hasil yang diperoleh adalah 1111. ini berarti tidak ada tombol yang ditekan pada kolom paling kiri. Selanjutnya pada port B dikirim data 1011 dan dilakukan pembacaan dari port A. Hasil diperoleh dari pembacaan tersebut yaitu 1011. Ini berarti ada tombol yang ditekan pada kolom kedua baris kedua. Melalui software yang dibuat dapat diketahui kode dari tombol yang ditekan. Untuk menghindari pembacaan yang salah karena adanya dua tombol atau lebih yang ditekan bersamaan, maka proses scanning dilakukan terhadap seluruh tombol keypad dan penghitungan jumlah tombol yang ditekan.
2.5 Motor Penggerak 2.5.1 Motor DC
Karakteristik utama motor DC adalah kecepatannya dapat berubah sebanding dengan besarnya arus yang diberikan. Selain itu, arah perputarannya juga dapat diubah dengan hanya membalik arah arus yang diberikannya. Setiap motor DC memiliki dua bagian dasar, yaitu :
1. Bagian yang tetap disebut stator. Stator ini menghasilkan medan magnet, baik yang dibangkitkan dari magnet permanen maupun dari sebuah koil yang dialiri arus listrik DC.
2. Bagian yang berputar disebut rotor atau armature. Rotor ini berupa koil yang dialiri arus listrik DC.
Cara kerja motor DC diperlihatkan dalam Gambar 2.9. Arus listrik mengalir ke koil rotor melalui sikat-sikat yang berhubungan dengan komutator, yang ditekan oleh pegas. Pada posisi seperti dalam Gambar 2.9a. aliran arus koil akan menghasilkan medan magnet yang berlawanan dengan medan magnet dari magnet stator, sehingga koil akan perputar ke arah yang ditunjukkan oleh anak panah. Apabila arah aliran arus tetap, koil akan diam pada posisi vertikal setelah berputar sejauh 90°.
Gambar 2.9 Mekanisme Motor DC
2.5.2 Motor Driver L298
IC L298 merupakan komponen penguat yang bisa digunakan sebagai rangkaian driver, karena memiliki keluaran arus minimal 2 ampere yang cukup digunakan untuk menggerakkan relay, solenoid, motor DC maupun stepper motor. Cukup dihubungkan ke mikrokontroler dan diberi tegangan sebesar 7 volt, maka driver berbasis L298 sudah dapat digunakan. Selain itu, supply IC L298 dapat diberi tegangan sampai 50 Volt.
Untuk menjalankan motor, pin enable A dan enable B pada IC L298 harus diberi logika 1. Current sensing A dan current sensing B dihubungkan ke ground. Input 1 dan input 2 masing-masing berlogika 1 dan 0, output 1 dan output 2 dihubungkan ke motor.
2.6 Sensor
Dalam dunia otomasi, sensor merupakan bagian yang tidak dapat diabaikan. Hal ini karena peranan sensor itu sendiri sebagai detektor dari perubahan-perubahan yang terjadi di lingkungan sekitar. Sensor dapat didefinisikan dari sebuah perangkat yang mengukur kuantitas fisik dan mengubahnya menjadi sinyal yang dapat dibaca oleh pembaca atau dengan suatu alat/instrumen.
D Sharon, dkk (1982), mengatakan sensor adalah suatu peralatan yang berfungsi untuk mendeteksi gejala-gejala atau sinyal-sinyal yang berasal dari perubahan suatu energi seperti energi listrik, energi fisika, energi kimia, energi biologi, energi mekanik dan sebagainya..
2.6.1 Sensor Optik
Salah satu jenis sensor yang banyak digunakan adalah Sensor optik. Sensor optik atau cahaya merupakan salah satu jenis sensor fisis yang mendeteksi perubahan cahaya dari sumber cahaya, pantulan cahaya ataupun bias cahaya yang mengenai benda atau ruangan. Contoh; photo cell, photo transistor, photo diode, photo voltaic, photo multiplier, pyrometer optic, dsb.
2.6.2 Photo Dioda
Gambar 2.11 Simbol Photo Dioda
Photodioda sering digunakan sebagai penangkap gelombang cahaya yang dipancarkan oleh Inframerah. Jumlah arus tegangan atau listrik yang dihasilkan tergantung oleh ukuran radiasi yang dipancarkan oleh photodioda inframerah. Ketika sebuah photon (satu satuan energi dalam cahaya) dari sumber cahaya diserap, hal tersebut membangkitkan suatu elektron dan menghasilkan sepasang pembawa muatan tunggal, sebuah elektron dan sebuah hole, di mana suatu hole adalah bagian dari kisi-kisi semikonduktor yang kehilangan elektron. Arah arus yang melalui sebuah semikonduktor adalah kebalikan dengan gerak muatan pembawa. Cara tersebut didalam sebuah photodiode digunakan untuk mengumpulkan photon - menyebabkan pembawa muatan (seperti arus atau tegangan) mengalir/terbentuk di bagian-bagian elektroda.
Gambar 2.12 Rangkaian pengkondisi sinyal dari photodiode
inverting amplifier dengan nilai sesuai dengan tingkat input dari kebutuhan, jumlah penguatan dilakukan dengan mengatur nilai R1 potensimeter.
2.6.3 Pemindaian Sensor Optik
Sebuah teknik pemindaian merupakan metode yang digunakan oleh sensor fotolistrik untuk mendeteksi objek (sasaran). Pada bagian ini, teknik terbaik yang digunakan sangat tergantung pada target. Beberapa target mempunyai warna buram dan yang lainnya sangatlah reflektif. Dalam beberapa kasus perlu juga untuk mempertimbangkan deteksi perubahan warna. Scanning jarak juga merupakan faktor dalam memilih teknik pemindaian. Beberapa teknik bekerja dengan baik pada jarak yang lebih besar sementara yang lain bekerja lebih baik ketika target lebih dekat dengan sensor.
a. Thru Beam
Pada metode ini, unit Emitor (pemancar) & Receiver (penerima) terletak secara terpisah. Agar receiver aktif begitu radiasi IR transmitter tiba, maka diperlukan keselarasan posisi antara keduanya.
Sebuah objek (target) yang ditempatkan di jalur blok sinar cahaya ke receiver, menyebabkan output receiver untuk mengubah keadaan. Ketika target tidak lagi blok jalan cahaya, maka output receiver kembali ke keadaan normal.
Gambar 2.13 Pemindaian secara Thru-Beam
transparan. Selain itu, getaran dapat menyebabkan masalah keselarasan. Keuntungan lebih dari thru-beam sensor adalah cocok untuk digunakan pada lingkungan dengan kontaminan udara. Kisaran penginderaan dapat mencapai 300 kaki.
b. Reflective
Reflektif ataupun retroreflective merupakan metode dimana Emitor (pemancar) dan Receiver (penerima) berada dalam satu unit. Dalam metode ini dibutuhkan suatu reflektor untuk meneruskan cahaya yang ditransmisikan oleh emitor dalam garis lurus dan dipantulkan kembali ke penerima.
Ketika target menghalangi jalan cahaya, maka output dari sensor akan mengalami perubahan kondisi. Ketika target tidak lagi menghalangi jalan cahaya, maka sensor akan kembali ke kondisi normal. Kisaran penginderaan dapat mencapai 35 kaki.
Gambar 2.14 Pemindaian secara Reflective
c. Diffuse
Sama halnya dengan metode Reflektif, pada metode Difusi ini, Emitor (pemancar) dan Receiver (penerima) berada dalam satu unit. Hanya saja tidak diperlukan reflector untuk memantulkan cahaya kembali dari Emitor ke Receiver.
Cahaya dari emitor akan menyerang target (objek) dan cahaya akan dipantulkan oleh objek tersebut dari permukaan kemudian menyebar ke semua sudut. Jika receiver (penerima) menerima cukup ringan sebagian hasil pantulan, maka output sensor akan beralih kondisi. Ketika cahaya tidak dipantulkan kembali ke penerima, maka keluaran sensor akan kembali pada kondisi semula.
Dalam metode ini, emitor (pemancar) harus ditempatkan secara tegak lurus terhadap target (objek). Sementara, receiver (penerima) akan diposisikan pada beberapa sudut dalam jangkauan dimana cahaya hasil pantulan tersebar (difus). Hanya sejumlah kecil cahaya yang akan mencapai penerima, oleh karena itu, metode ini memiliki jangkauan efektif sekitar 40 inchi.