1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Indonesia merupakan negara yang memiliki kekayaan komoditas bahan tambang melimpah. Batubara merupakan salah satu komoditas bahan tambang tersebut. Dalam kegiatan penambangan batubara dikenal istilah stockpile. Stockpile berfungsi sebagai tempat penyimpanan sementara batubara dalam bentuk timbunan sebelum dilakukan pengiriman. Pada proses penyimpanan ini diharapkan dalam waktu tidak terlalu lama, karena akan berakibat pada penurunan kualitas batubara. Penurunan kualitas batubara biasanya lebih dipengaruhi proses oksidasi dan faktor alam.
Dalam rangka manajemen stockpile, pemantauan volume stockpile secara periodik diperlukan untuk mengetahui kuantitas batubara yang masuk (coal in) dan keluar (coal out). Penentuan volume stockpile dapat dilakukan dengan cara teristris dan cara ekstra teristris. Metode yang sering digunakan PT. Bukit Asam Tbk dalam menentukan volume stockpile batubara adalah metode pemetaan teristris. Metode teristris dilakukan dengan survei langsung di lapangan dengan menggunakan alat pengukur jarak dan sudut. Dasar dari metode teristris ini adalah dengan mengukur sudut dan jarak suatu titik, sehingga didapat titik titik koordinat (x,y,z) sehingga dapat dilakukan penghitungan volume. Keterbatasan metode teristris ini yaitu proses akuisisi data di lapangan membutuhkan waktu yang lama, sehinga kurang efisien.
Selain dengan metode teristris, penentuan volume dapat dilakukan dengan menggunakan metode ekstrateristris. Metode ekstrateristris dalam pengambilan datanya tidak perlu berinteraksi secara langsung dengan obyek yang ada di lapangan. Salah satu metode ekstrateristris adalah fotogrametri jarak dekat. Fotogrametri jarak dekat adalah fotogrametri yang diterapkan pada obyek di permukaan bumi, dengan jarak obyek tersebut ke kamera kurang dari 300 meter (Mathew, 2008). Pada prinsipnya fotogrametri jarak dekat dilakukan dengan pengambilan gambar di sekitar/sekeliling obyek yang akan diprotret dengan posisi kamera yang konvergen
2 (Atkinson, 1996). Teknik fotogrametri jarak dekat pada umumnya digunakan untuk memodelkan obyek secara 3D dan metode ini membutuhkan waktu akuisisi data di lapangan relatif lebih efisien daripada menggunakan pemetaan teristris sehingga perlu dikaji apakah fotogrametri jarak dekat dapat digunakan salah satu metode untuk menentukan volume stockpile batubara. Fotogrametri jarak dekat diharapkan dapat menjadi alternatif yang bisa mendukung penyediaan data volume suatu timbunan stockpile pada pekerjaan mining.
I.2. Identifikasi Masalah
Penentuan volume stockpile batubara biasanya dilakukan dengan pemetaan teristris. Pemetaan teristris dilakukan secara langsung di lapangan untuk mendapatkan data ukuran teristris yang kemudian diolah menggunakan software tertentu. Pengolahan data ini dilakukan dengan cara memodelkan 3D hasil data ukuran teristris dan dilakukan penghitungan volume. Salah satu alternatif untuk penentuan volume stockpile batubara yaitu dengan memanfaatkan fotogrametri jarak dekat. Fotogrametri jarak dekat pada umumnya digunakan untuk memodelkan obyek tertentu. Dengan menggunakan fotogrametri jarak dekat volume suatu obyek dapat diketahui dari pemodelan tiga dimensi. Waktu akuisisi data di lapangan relatif lebih efisien daripada menggunakan pemetaan teristris. Metode fotogrametri jarak dekat diharapkan dapat menjadi salah satu alternatif untuk menentukan volume stockpile batubara.
I.3. Pertanyaan Penelitian
Pertanyaan penelitian yang dapat disusun dari identifikasi masalah diatas sebagai berikut :
1. Bagaimana melakukan penentuan volume stockpile batubara dengan metode fotogrametri jarak dekat ?
2. Berapa besar perbedaan hasil penentuan volume stockpile batubara antara metode fotogrametri jarak dekat dibandingkan dengan pemetaan teristris ?
I.4. Cakupan Penelitian Cakupan masalah pada penelitian ini adalah :
3 2. Pemotretan dilakukan dengan menggunakan kamera small format, yaitu
kamera digital single lens reflex (DSLR).
3. Panjang fokus yang digunakan pada setiap pemotretan diatur selalu sama. 4. Pengukuran teristris dilakukan dengan Total Station.
I.5. Tujuan Penelitian
1. Menghitung volume stockpile dengan metode fotogrametri jarak dekat.
2. Membandingkan volume stockpile batubara hasil fotogrametri jarak dekat dengan pemetaan teristris.
I.6. Manfaat Penelitian
Penelitian ini diharapkan dapat mengetahui seberapa besar perbedaan penentuan volume stockpile batubara antara metode fotogrametri jarak dekat dengan metode pemetaan teristris. Fotogrametri jarak dekat diharapkan dapat menjadi salah satu alternatif dalam penentuan volume stockpile batubara.
I.7. Tinjauan Pustaka
Penelitian ini menerapkan metode fotogrametri jarak dekat sebagai perbandingan dengan metode pemetaan teristris untuk penentuan volume stockpile batubara. Beberapa penelitian yang pernah ada sebelumnya, meneliti penerapan fotogrametri jarak dekat untuk berbagai macam objek.
Anandito (2011) dalam skripsinya memanfaatkan fotogrametri jarak dekat untuk membandingkan volume dari berbagai jenis material. Material yang digunakan antara lain: gundukan tanah, timbunan kerikil dan gundukan pasir. Penentuan volume dilakukan dengan cara fotogrametri jarak dekat auto referencing dan manual referencing yang kemudian dibandingkan dengan data teristris. Hasil penelitian didapatkan pemodelan dengan metode fotogrametri jarak dekat auto referencing lebih rapat daripada metode fotogrametri jarak dekat manual referencing dan metode teristris. Selisih hasil penentuan volume cara fotogrametri jarak dekat manual referencing dan data teristris obyek gundukan tanah sebesar 0.558%, obyek timbunan kerikil sebesar 3.527% dan obyek gundukan pasir sebesar 1.980%. Sedangkan selisih hasil penentuan volume cara fotogrametri jarak dekat auto referencing dan data teristris
4 obyek gundukan tanah sebesar 1.489%, obyek timbunan kerikil sebesar 4.601% dan obyek gundukan pasir sebesar 0.495%.
Sarinurrohman (2005) dalam penelitiannya memodelkan objek dengan bentuk geometri sederhana dengan metode fotogrametri jarak dekat. Objek yang digunakan berbentu kubus, bola, tabung. Tujuan dari penelitian ini adalah mendapatkan model 3D dari obyek dengan bentuk geometri sederhana, dan melakukan analisis visual dan dimensi. Analisis dimensi hasil pemodelan dengan membandingkan ukuran jarak, luas dan volume dari hasil pemodelan dengan objek yang sesungguhnya. Dari hasil penelitian didapatkan selisih volume kubus paling kecil dan bola yang paling besar.
Janu (2016) dalam skipsinya melakukan hitungan volume stockpile batubara menggunakan metode fotogrametri jarak dekat dan dibandingkan dengan metode GNSS. Tujuan dari studi ini adalah Proyek ini bertujuan untuk menentukan volume tumpukan batubara menggunakan metode fotogrametri jarak dekat berdasarkan nilai toleransi hitungan yang diatur dalam kontrak kerja PT. Bukit Asam (Persero). Hasil studi ini didapatkan pemodelan dengan metode fotogrametri jarak dekat lebih rapat daripada metode GNSS. Selisih hasil penentuan volume stockpile batubara metode fotogrametri jarak dekat dan metode GNSS 0.652%, sehingga memenuhi nilai toleransi pengukuran sebesar ±5 % berdasarkan kontrak kerja PT. Bukit Asam (Persero).
Dalam penelitian ini, obyek yang dipakai berupa timbunan stockpile batubara yang mempunyai bentuk geometri tidak teratur. Dari hasil pemodelan 3D kemudian ditentukan volumenya. Penelitian ini membahas perbandingan volume stockpile batubara dari pemodelan 3D menggunakan metode fotogrametri jarak dekat dan hasil pemetaan teristris.
I.8. Landasan Teori I.8.1. Stockpile
Stockpile batubara adalah tempat penyimpanan sementara batubara sebelum dijual atau dikapalkan (Indonesiacoalbarge, 2016). Stockpile batubara juga disebut sebagai gudang sementara batubara hasil dari penambangan (exporasi)
5 sebelum barubara ini dikapalkan untuk dijual. Aktivitas yang ada di stockpile batubara antara lain :
1. Kegiatan Crushing, yaitu kegiatan penghancuran barubara dari bongkahan-bongkahan besar menjadi butiran-butiran kecil. Kegiatan Crushing ini juga disebut dengan istilah resizing.
2. Penyemprotan Kimiawi, yaitu kegiatan penyemprotan batubara dengan cairan kimia dengan tujuan agar barubara tidak mudah terbakar.
3. Pelabelan Batubara, yaitu pemberian label kode pada setiap tumpukan batubara. Kode di setiap tumpukan ini menunjukkan nama pemilik batubara tersebut atau nilai kalori atau GAR batubaranya.
Manajemen Stockpile (Stockpile Management) merupakan suatu proses perencanaan, pengorganisasian, pengkoordinasian dan pengontrolan sumber daya untuk mencapai sasaran secara efektif dan efesien (IPC,2016). Dimana efektif berarti bahwa tujuan dapat dicapai sesuai dengan rencana, dan efesien berarti bahwa tugas yang telah ada dilaksanakan secara benar, terorganisir dan sesuai dengan perencanaan. Dalam kaitanya dengan fungsi dari ROM stockpile batubara sebagai tempat penimbunan sementara maka diperlukan sistem manajemen stockpile yang tepat.
Penimbunan batubara merupakan salah satu tahapan pentng dari kegiatan penanganan batubara. Apabila sistem penimbunan kurang memadai maka dapat mengganggu kegiatan pembongkaran timbunan batubara di tempat penimbunan, terutama bagi batubara yang mudah terbakar dengan sendirinya. Sehingga dengan adanya upaya perbaikan manajemen timbunan, upaya menghindari gejala swabakar dan upaya menghindari dan mengatasi timbulnya genangan air, proses terjadinya swabakar dan genangan air pada penimbunan batubara dapat dicegah sekecil mungkin. Dalam proses penyimpanan diharapkan jangka waktunya tidak terlalu lama, karena akan berakibat pada penurunan kualitas batubara. Proses penurunan kualitas biasanya lebih dipengaruhi oleh proses oksidasi dan faktor alam. Prinsif dasar pengelolaan stockpile adalah penerapan sistem FIFO ( Base In Base Out ), dimana batubara yang terdahulu masuk, harus dikeluarkan terlebih dahulu.
6 I.8.2. Pemetaan Teristris
Metode terestrial adalah proses pemetaan yang pengukurannya langsung dilakukan di permukaan bumi dengan peralatan tertentu (Basuki, 2006). Data yang di akuisisi yaitu berupa ukuran sudut dan/atau jarak, yang dikerjakan dengan teknik - teknik pengambilan data trilaterasi (jarak), triangulasi (sudut) atau triangulaterasi (sudut dan jarak). Teknik pemetaan mengalami perkembangan sesuai dengan perkembangan ilmu dan teknologi. Dengan perkembangan peralatan pengukuran secara elektronis, maka proses pengukuran detil menjadi semakin cepat dengan tingkat ketelitian yang tinggi. Detil adalah segala obyek yang ada di lapangan, baik bersifat alamiah seperti sungai, lembah, bukit, alur, dan rawa, maupun hasil budaya manusia seperti jalan, jembatan, gedung, lapangan stasiun, selokan dan batas – batas pemilikan tanah yang akan dijadikan isi dari peta yang akan dibuat (Basuki, 2006). Penentuan posisi titik detil yaitu diikatkan pada titik kerangka pemetaan terdekat yang diukur sebelumnya atau mungkin sudah ada. Secara umum bagan pemetaan terestris dapat dilihat dalam gambar I.1.
Pemetaan Teristris Pengukuran di Lapangan Penghitungan data (x,y,z) Penggambaran: - kerangka peta - detil - konturing - editing A Metode/Teori Peralatan - Total Station - Teodolit - B.T.M - Pita Ukur Macam Ukuran: - kerangka peta - detil - syarat pemakaian - cara pengoperasian
7 Gambar I. 1. Bagan pemetaan teristris (Basuki, 2006)
Ada beberapa metode atau cara penentuan posisi titik detil, antara lain: metode offset, metode polar dan metode pemotongan. Penelitian ini menggunakan metode polar dengan pengukuran sudut. Metode polar mengukur posisi tiga dimensi (x,y,z). Pada metode ini ditentukan dengan komponen azimuth (sudut, arah), jarak, dan beda tinggi dari titik ikat. Karena detil yang diukur banyak, pengukuran dilakukan dengan teknik yang cepat, yang disebut takhimetri. Disini azimuth/sudut diukur dengan alat ukur, jarak diukur dengan optis dan beda tinggi diukur secara trigonometris. Metode polar dengan pengukuran sudut paling banyak dilakukan dalam pemetaan pemetaan topografi atau peta teknis. Pada setiap kedudukan alat ukur, sebelum membidik titik – titik detil terlebih dahulu membidik salah satu titik poligon di muka atau belakangnya sebagai dasar acuan untuk menghitung sudut horizontal antara titik detil dan arah poligon (βi), sekaligus untuk menentukan azimuth titik detil tersebut (αAa = αAB ± βa), karena azimuth sisi poligon (αAB) telah diketahui dari perhitungan kerangka peta.
Jenis Ukuran: - azimut - jarak - beda tinggi - sudut horizontal - sudut vertikal Tingkat ketelitian A
8 I.8.3. Fotogrametri Jarak Dekat
Fotogrametri jarak dekat adalah teknologi fotogrametri untuk memperoleh informasi terpercaya tentang obyek fisik dan lingkungan melalui proses perekaman, pengukuran, dan intrepetasi gambaran fotografik dan pola radiasi tenaga elektromagnetik yang terekam dengan kamera yang terletak di permukaan bumi (teristris). Istilah fotogrametri jarak dekat diperkenalkan sebagai suatu teknik fotogrametri dengan jarak antara kamera dengan obyek kurang dari 100 m (Atkinson, 1996). Dalam bidang geodesi, metode fotogrametri jarak dekat ini banyak dimanfaatkan karena dapat memberikan informasi jarak, luas, volume. Dari hasil pengukuran dengan metode fotogrametri jarak dekat dapat diperoleh model tiga dimensi dalam sistem foto. Pembuatan model tiga dimensi menggunakan data fotogrametri jarak dekat, terbagi dalam tiga tahap, yaitu orientasi dalam, orientasi relatif dan orientasi absolut. Menurut Mathew (2008) orientasi dalam merupakan suatu proses yang memerlukan nilai kalibrasi kamera, karena dalam proses ini akan terjadi koreksi pada kesalahan akibat distorsi kamera dan kesalahan lain pada kamera. Orientasi relatif adalah suatu proses menentukan elemen orientasi luar pada kamera. Dalam orientasi relatif, suatu foto akan dihubungkan dengan foto lain, sehingga akan tersusun posisi foto yang kondisinya sama seperti saat pemotretan. Setelah foto memiliki kondisi yang sama seperti saat pemotretan, maka foto yang saling bertampalan dapat dibuat model tiga dimensinya. Orientasi absolut adalah suatu proses untuk mengubah koordinat model tiga dimensi yang dihasilkan yang semula masih dalam koordinat relatif menjadi koordinat tanah.
I.8.3.1 Skenario pengambilan foto. Posisi suatu objek dapat diketahui apabila suatu objek direkam minimal dalam dua buah foto (bertampalan), dengan demikian suatu objek dapat diketahui posisinya relatif terhadap stasiun pengambilan foto. Untuk mendapatkan foto objek yang saling bertampalan maka posisi kamera selalu berpindah. Beberapa skenario yang dapat diterapkan dalam perekaman objek ditampilkan dalam gambar I.2
9 Gambar I. 2. Skenario perekaman objek dengan foto teristris (Agisoft, 2014).
Skenario perekaman pertama dilakukan pada objek diluar ruang seperti pemotretan gedung atau objek lainnya. Posisi kamera yang benar saat perekaman adalah posisi planar. Posisi ini akan menghasilkan foto dengan kemiripan orientasi antar foto. Skenario perekaman kedua dilakukan pada objek di dalam ruang. Posisi kamera yang benar adalah posisi yang mampu mencakup keseluruhan ruang. Skenario perekaman ketiga dilakukan pada objek terisolasi. Posisi kamera yang digunakan dikenal dengan sebutan posisi konvergen. Posisi ini mampu menghasilkan konfigurasi
10 perbandingan base/height ratio yang baik (Maharani, 2015). Pada beberapa kasus, penggunaan model stereo dari dua buah foto tidak dapat merekonstruksi objek yang kompleks, sehingga dibutuhkan jumlah foto yang banyak untuk merekonstruksi keseluruhan objek.
I.8.4. Kamera Digital
Penggunaan kamera digital erat kaitannya dalam perkembangan era digital dan keekonomisannya untuk aplikasi fotogrametri jarak dekat. Kamera digital merupakan salah satu jenis kamera non-metrik yang sering digunakan untuk berbagai kepentingan. Kamera digital mamiliki komponen utama yang terdiri atas lensa, sensor, dan media penyimpanan. Kamera ini memiliki karakteristik desain yang berbeda dengan kamera analog. Perbedaan utamanya ialah pada media film seluloid yang diganti oleh sensor optik elektrik seperti Charge–Couple Device (CCD) atau Complementary Metal Oxide Semiconductor (CMOS). CCD berfungsi mengubah photon yang jatuh mengenai permukaan sensor menjadi elektron yang selanjutnya elektron ini diakumulasikan ke dalam kapasitor dan diubah menjadi bentuk sinyal elektronik. CCD memiliki keunggulan di mana sensor lebih peka terhadap cahaya sehingga pada kondisi redup tanpa bantuan flash masih bisa menangkap obyek dengan baik. Semakin banyak piksel yang terdapat di dalam sensor, maka resolusinya semakin tinggi. Konsekuensi yang ditimbulkan ialah media penyimpanannya memerlukan kapasitas yang lebih besar (Suharsana, 1997). Kamera digital juga dilengkapi dengan Liquid Crystal Display (LCD), yaitu layar monitor mini yang digunakan untuk melihat secara langsung hasil pemotretan yang dilakukan. Adanya LCD ini dapat membantu pengguna untuk memilih dan mengatur menu secara interaktif, serta apabila hasil pemotretan kualitasnya kurang baik, maka dapat langsung dihapus, kemudian dilakukan pemotretan ulang. Terdapat sebuah istilah yang dikenal dengan nama ppi (pixel per inch) pada kamera digital. Ppi menunjukkan jumlah piksel per inchi linear dalam sebuah foto.
I.8.5. Geometri Kamera
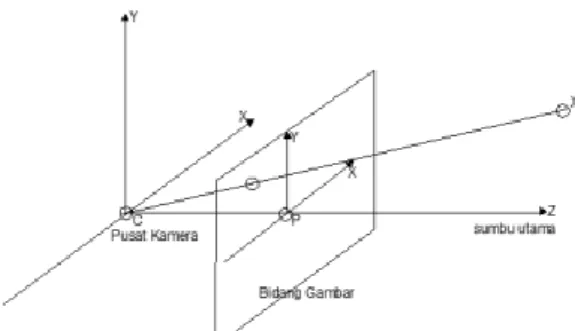
Geometri proyeksi kamera memperlihatkan hubungan antara bidang gambar, pusat kamera, dan panjang fokus kamera (Axis, 2010). Model geometri proyeksi kamera digambarkan dengan panjang fokus kamera (f) yang merupakan jarak antara
11 pusat kamera (c) dengan bidang gambar (P). Geometri proyeksi kamera dapat dilihat pada gambar I.3.
Gambar I. 3. Geometri proyeksi kamera tiga dimensi (Axis, 2010 dan Maharani,2015).
Foto yang bertampalan dibutuhkan dalam pembuatan model tiga dimensi, sehingga foto-foto tersebut akan menghasilkan geometri kamera epipolar. Geometri epipolar adalah suatu kondisi dimana dua sistem kamera terletak pada suatu garis yang sama (Axis, 2010). Geometri epipolar dapat dilihat pada gambar I.4.
Gambar I. 4. Geometri epipolar dua buah kamera (Wolf dkk, 2014).
Gambar I.4 mendefinisikan bahwa geometri epipolar foto ditentukan dari dua posisi kamera yang memiliki korespondensi. Setiap bidang foto harus dapat mendefinisikan garis epipolar yang menghubungkan kedua bidang foto. Garis epipolar yang dibentuk dari dua bidang foto adalah garis pangkal L1L2.
12 I.8.6. Kalibrasi Kamera
Setiap kamera tidak mempunyai lensa yang sempurna, sehingga proses pemotretan yang dilakukan akan memiliki kesalahan. Oleh karena itu perlu dilakukan pengkalibrasian kamera untuk dapat menentukan besarnya penyimpangan - penyimpangan yang terjadi. Kalibrasi adalah kegiatan untuk memastikan hubungan antara harga-harga yang ditunjukkan oleh suatu alat ukur dengan harga yang sebenarnya dari besaran yang diukur. Kalibrasi kamera dilakukan untuk menentukan parameter distorsi, meliputi distorsi radial dan distorsi tangensial, serta parameter-parameter lensa lainnya, termasuk juga panjang titik utama (c), serta titik pusat fidusial foto. Model kalibrasi terdiri dari element interior orientasi (xo, yo, c), koefisien distorsi lensa (K1, K2, K3, P1, and P2). Geometri orientasi dalam dapat dilihat di gambar 1.5
Gambar I. 5. Geometri sebagian orientasi dalam (Abdelhafiz, 2009 dalam Aristia 2014)
Distorsi lensa dapat menyebabkan bergesernya titik pada foto dari posisi yang sebenarnya, sehingga memberikan ketelitian pengukuran yang tidak baik, namun tidak mempengaruhi kualitas ketajaman citra yang dihasilkan (Hanifa 2007). Distorsi lensa terbagi atas distorsi radial dan distorsi tangensial. Brown’s Camera Distortion Model merupakan model matematik yang digunakan untuk menentukan parameter deformasi lensa yang muncul pada foto. Model tersebut menggambarkan distorsi radial dan distorsi tangensial dari lensa. Persamaan distorsi dapat dituliskan sebagai berikut (Agisoft,2014):
13 𝑥′=𝑥(1+𝐾1𝑟2+𝐾2𝑟4+𝐾3𝑟6+𝐾4𝑟8)+ 𝑃2(𝑟2+2𝑥2)+2𝑃1xy ... (I.1)
𝑦′=𝑦(1+𝐾1𝑟2+𝐾2𝑟4+𝐾3𝑟6+𝐾4𝑟8)+ 𝑃1(𝑟2+2𝑦2)+2𝑃2xy ... (I.2) dalam hal ini,
(X, Y, Z ) : titik koordinat dalam sistem koordinat lokal kamera
(u, v) : titik koordinat proyeksi pada system koordinat foto (dalam piksel) (𝑓𝑥, 𝑓𝑦) : panjang fokus
𝐾1,𝐾2, 𝐾3,𝐾4 : koefisien distorsi radial lensa 𝑃1, 𝑃2 : koefisien distorsi tangensial lensa
r : jarak penyimpangan dari titik A ke principle point
I.8.7. Bundle Adjustment
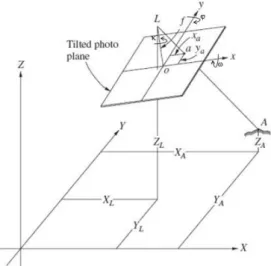
Bundle Adjustment adalah model hitungan matematis yang digunakan untuk mencari parameter Exterior Orientation (EO) dan koordinat tie point berdasarkan persamaan kolinear (Habib, 2012). Hubungan antara sistem koordinat foto dan sistem koordinat tanah dapat dilihat melalui Gambar I.6.
Gambar I. 6. Hubungan antara sistem koordinat foto dan sistem koordinat tanah (Wolf, 1993 dan Habib, 2012)
14 dengan:
𝑥𝑎′, 𝑦
𝑎′ : koordinat foto untuk titik a f : panjang fokus kamera 𝑥𝑜 , 𝑦𝑜 : koordinat principle point
𝑋𝐿, 𝑌𝐿, 𝑍𝐿 : koordinat untuk posisi kamera 𝑋𝐴, 𝑌𝐴, 𝑍𝐴 : koordinat tanah untuk titik A ω, φ, κ : rotasi pada bidang foto
XL, YL, ZL, ω, φ, dan κ, disebut sebagai parameter orientasi luar kamera atau Exterior Orientation Parameters (EOP). Sedangkan xo, yo, dan f, adalah parameter orientasi dalam kamera atau Interior Orientation Parameters (IOP).
I.8.4.1. Bundle adjustment with self-calibration. Exterior Orientation Parameters (EOP) dan Interior Orientation Parameters (IOP) pada FUFK ditentukan secara bersamaan menggunakan metode bundle adjustment with self-calibration. Data kalibrasi untuk kamera non-metrik tidak disediakan oleh pabrik, sehingga test field calibration alternatif adalah self-calibration dimana IOP ditentukan pada saat yang sama sebagai titik koordinat suatu objek (bundle adjustment principle). Kualitas dari hasil self-calibration sangat tergantung pada jumlah, tingkat presisi, dan persebaran dari titik kontrol tanah yang diberikan (Aber, 2010).
IOP ditunjukkan oleh nilai panjang fokus, titik pusat foto, dan komponen distorsi lensa: distorsi radial dan distorsi tangensial. Agisoft mengasumsikan semua model foto mengalami proyeksi terpusat dari kamera (a central projection camera). Distorsi non-linear dimodelkan menggunakan model distorsi Brown dimana model kamera melakukan transformasi dari titik koordinat pada sistem koordinat lokal kamera ke koordinat piksel pada foto. Sistem koordinat lokal kamera memiliki titik pusat pada pusat proyeksi kamera. Sedangkan pada sistem koordinat foto, titik pusat berada pada piksel di pojok kiri atas dengan pusat pikselnya memiliki koordinat (0,5;0,5). Koordinat foto diukur dalam satuan piksel.
Persamaan yang digunakan untuk memproyeksikan titik suatu objek pada sistem koordinat lokal kamera ke foto dengan mengacu pada Gambar I.6 dapat dilihat pada Rumus I.8 dan Rumus I.9.
15 𝑦̅ = 𝑦𝑎− 𝑦𝑜 ... (I.4) 𝑟 = √𝑥̅2 + 𝑦̅2 ... (I.5) 𝑥𝑎′= 𝑥̅(1 + 𝐾 1𝑟2+ 𝐾2𝑟4+ 𝐾3𝑟6+ 𝐾4𝑟8) + 𝑃2(𝑟2+ 2𝑥̅2) + 2𝑃1𝑥̅𝑦̅ .. (I.6) 𝑦𝑎′= 𝑦̅(1 + 𝐾1𝑟2+ 𝐾2𝑟4+ 𝐾3𝑟6+ 𝐾4𝑟8) + 𝑃1(𝑟2+ 2𝑦̅2) + 2𝑃 2𝑥̅𝑦̅ .. (I.7) 𝑢 = 𝑥𝑜+ 𝑥𝑎′𝑓 + 𝑦 𝑎′𝑠𝑘𝑒𝑤 ... (I.8) 𝑣 = 𝑦𝑜+ 𝑦𝑎′𝑓 ... (I.9) dimana:
𝑢, 𝑣 : koordinat foto untuk titik a terkoreksi dalam piksel 𝑥𝑎′, 𝑦𝑎′ : koordinat foto untuk titik a terkoreksi
𝐾1, 𝐾2, 𝐾3, 𝐾4 : koefisien distorsi radial 𝑃1, 𝑃2 : koefisien distorsi tangensial
𝑠𝑘𝑒𝑤 : koefisien antara sumbu x dan sumbu y 𝑥̅, 𝑦̅ : koordinat foto relatif terhadap principle point 𝑟 : jarak radial dari foto ke principle point
I.8.8. Pemodelan Tiga Dimensi
Pemrosesan foto terestris format kecil metode fotogrametri jarak dekat menggunakan software Agisoft Photoscan. Agisoft Photoscan merupakan software untuk pemodelan 3D dari gambar atau foto yang direkam secara stereo dimana objek yang akan direkonstruksi terlihat pada setidaknya dua foto dengan kondisi foto baik diketahui posisi kameranya maupun tidak. Proses rekonstruksi 3D sepenuhnya dilakukan secara otomatis. Proses pengolahan foto menggunakan Agisoft Photoscan melalui beberapa tahap, yaitu:
1. Pemilahan Foto
Tahap awal dari pemrosesan foto dalam Agisoft adalah pembuatan lembar kerja atau chunk. Pembuatan chunk tergantung dari jumlah foto dan kemampuan Personal Computer (PC). Lamanya pemrosesan foto sebanding dengan jumlah foto, tipe pemrosesan foto, dan kemampuan PC. Foto yang akan diolah sebaiknya dipilah terlebih dahulu. Foto yang terlalu miring dan terlihat tidak fokus sebaiknya tidak digunakan.
16 2. Align Photos
Hasil dari proses align photos adalah terbentuknya point cloud dan posisi kamera. Terdapat beberapa parameter untuk mengontrol proses align photos, yaitu accuracy dan pair preselection.
a) Accuracy, menunjukkan perkiraan ketepatan pendefinisian posisi kamera. High accuracy akan memproses foto dengan ukuran sebenarnya. Medium accuracy akan memproses foto dengan memperkecil ukuran foto yaitu dua kali lebih kecil dari ukuran foto sebenarnya. Sedangkan pada low accuracy, foto diperkecil sampai empat kali lebih kecil dari ukuran sebenarnya, sehingga posisi kamera yang dihasilkan adalah posisi yang kasar.
b) Pair preselection, merupakan proses penggabungan foto dengan mencocokkan objek-objek sama pada setiap foto. Proses ini membutuhkan waktu yang cukup lama. Terdapat dua pilihan dalam pair preselection, yaitu generic dan reference. Generic cocok untuk menampalkan foto yang mempunyai akurasi rendah (lower accuracy), karena tidak diketahui posisi kamera. Reference digunakan untuk menampalkan foto jika posisi kamera terukur (diketahui).
Parameter tambahan yang juga berpengaruh dalam proses align photos adalah key point limit dan tie point limit. Key point limit merupakan jumlah maksimum titik yang diperhitungkan dari objek-objek pada setiap foto. Tie point limit adalah jumlah maksimum titik yang sesuai atau bertampalan pada setiap foto. Jumlah tie point yang terlalu tinggi akan menyebabkan sebagian model dense point cloud hilang (diabaikan). Hal ini dikarenakan Agisoft hanya mendefinisikan tie point pada sepasang foto yang bertampalan dengan batas tertentu.
3. Optimization of Camera Alignment
Agisoft dapat memperkirakan parameter orientasi dalam dan luar kamera saat proses penggabungan foto. Parameter orientasi dalam dan luar kamera ditentukan bersamaan dengan proses pendefinisian koordinat tanah (georeferencing) menggunakan prinsip bundle adjustment (sub-bab I.8.7). Pendefinisian koordinat tanah melalui transformasi linear menggunakan tujuh parameter (tiga parameter translasi, tiga parameter rotasi, dan satu parameter skala). Transformasi ini hanya mengoreksi kesalahan linear pada penggabungan foto. Komponen non-linear tidak dapat dihilangkan dengan pendekatan ini.
17 Deformasi non-linear pada model disebabkan oleh ketidaktepatan perkiraan parameter orientasi dalam dan luar kamera saat proses penggabungan foto. Beberapa faktor yang mempengaruhinya, yaitu tumpang tindih antar foto dan bentuk permukaan objek. Deformasi non-linear dapat diminimalkan melalui editing manual dengan cara menghapus point cloud yang posisinya tidak sesuai, seperti outlier.
Selain data posisi, Agisoft juga menyediakan referensi data menggunakan data jarak sebagai pengontrol. Dengan demikian, model 3D yang dihasilkan dapat disesuaikan dengan ukuran di lapangan.
4. Pembentukan Dense Point Cloud
Berdasarkan perkiraan posisi kamera dengan program perhitungan yang lebih mendalam, Agisoft memungkinkan untuk menghasilkan dan memvisualisasikan model dense point cloud dengan tingkat kepadatan yang sama. Hasil dense point cloud ini dapat diedit dan diklasifikasikan (export) dalam bentuk lain seperti 3D Mesh untuk analisis lebih lanjut.
Terdapat dua parameter yang mempengaruhi pembentukan dense point cloud, yaitu quality dan depth filtering mode.
a) Quality, menunjukkan kualitas dari foto yang akan digunakan untuk membentuk dense point cloud. Kualitas ultra high digunakan untuk mendapatkan detil dan akurasi geometri yang tinggi dengan mengolah foto pada ukuran sebenarnya. Sama halnya dengan proses align photos, pada setiap pilihan kualitas pre processing foto selanjutnya akan mengalami perubahan ukuran foto menjadi dua kali lebih kecil dari ukuran sebenarnya dalam setiap sisi.
b) Depth filtering mode, menunjukkan cara perlakuan terhadap titik tinggi karena tekstur yang jelek, adanya noise atau foto tidak fokus, dan outlier di antara titik-titik. Terdapat tiga algoritma untuk memilah outliers, yaitu mild, moderate, dan aggressive. Mild dipilih jika geometri yang akan dibentuk adalah kompleks dengan kedetilan pada objek yang kecil, sedangkan untuk pembentukan geometri yang tidak mengharuskan untuk kedetilan objek maka dipilih aggressive depth filtering mode. Moderate depth filtering mode memberikan hasil antara mild dan aggressive depth filtering mode.
18 5. Pembentukan Mesh
Agisoft membentuk 3D poligon mesh yang merepresentasikan permukaan objek berdasarkan data dense point cloud. Dense point cloud masih mencakup kenampakan seluruh objek yang ada di permukaan bumi, sehingga perlu dilakukan proses filter. Proses filter pada Agisoft menggunakan metode slope based filter. Hasil filter digunakan untuk membentuk Digital Elevation Model (DEM) berupa Digital Terrain Model (DTM) berdasarkan klasifikasi ground point class.
Terdapat lima parameter yang mempengaruhi pembentukan mesh, yaitu surface type, resource data, poligon count, interpolation, dan point classes. Pertama, surface type terdiri dari arbitrary yang digunakan untuk pemodelan berbagai jenis objek yang diambil secara dekat, seperti tugu, bangunan, dan lain-lain dan height field untuk pemodelan permukaan bumi, seperti terrain. Kedua, source data merupakan sumber data yang digunakan untuk membentuk 3D mesh, yaitu sparse point cloud dipilih untuk pembentukan model 3D secara cepat dan dense point cloud dipilih untuk hasil yang lebih baik dari hasil proses sebelumnya, namun membutuhkan waktu yang lebih lama. Ketiga, polygon count merupakan jumlah maksimum poligon yang akan dibentuk. Terdapat tiga nilai yaitu high, medium, dan low, masing-masing berjumlah 1/5, 1/15, dan 1/45 dari jumlah titik yang terbentuk pada dense point cloud. Pemilihan nilai harus diperhatikan karena jumlah poligon yang terlalu kecil cenderung menghasilkan poligon yang kasar dan jumlah poligon yang terlalu besar akan menyebabkan masalah dalam visualisasi model dalam software eksternal.
Keempat, interpolation memiliki tiga pilihan yaitu disabled yang hanya menginterpolasi secara akurat berdasarkan data dense point cloud yang ada saja, enabled (default) tidak hanya menginterpolasi data dense point cloud yang ada tetapi juga dalam radius tertentu, dan extrapolation yang memungkinkan adanya area tambahan akibat interpolasi yang berlebih. Kelima, point classes yaitu menentukan kelas dari dense point cloud yang telah diklasifikasikan sebelumnya, seperti ground point class untuk pembentukan DTM.
6. Pembentukan Model Texture
Tahap terakhir adalah pembentukan tekstur yang digunakan untuk menghasilkan orthophoto. Pemilihan parameter pembentukan tekstur sangat
19 menentukan hasil akhir dari model, berupa kualitas visual. Terdapat lima parameter pada pilihan mapping mode, yaitu: Pertama, generic memungkinkan pembentukan tekstur untuk geometri arbritrary (tekstur dibuat secara seragam). Kedua, adaptive orthophoto membagi permukaan objek dalam dua bagian: datar dan vertikal. Bagian datar menggunakan proyeksi ortogonal dan bagian vertikal dipisahkan untuk menjaga keakuratan dari area bagian tersebut. Ketiga, orthophoto menjadikan seluruh permukaan diproyeksikan secara ortogonal. Keempat, spherical, dipilih untuk kelas tertentu pada objek yang memiliki bentuk seperti bola. Kelima, single photo memungkinkan hanya menghasilkan tekstur dari satu foto. Terakhir keenam, keep uv yang menghasilkan tekstur menggunakan resolusi yang berbeda.
Beberapa parameter lainnya antara lain: texture from (hanya untuk single photo), blending mode (tidak cocok untuk single photo) terdiri dari mosaic yang memberikan kualitas lebih untuk orthophoto dan tekstur jika dibandingkan dengan average mode yang menggunakan nilai rata-rata dari semua piksel foto. Max intensity dan min intensity hanya menggunakan foto yang memiliki intensitas maksimum dan minimum. Selanjutnya, texture size atau count yang merupakan ukuran dari tekstur yang terbentuk dalam satuan piksel dan menentukan ukuran file dari tekstur yang akan dikeluarkan (export).
I.8.9. Ground Sampling Distance
Menurut Harintaka (2012), Ground Sample Distance (GSD) adalah nilai ukuran terkecil yang mampu terekam dalam satu piksel. Hitungan untuk memperoleh nilai GSD dapat dilihat pada persamaan I.10 dan I.11.
GSD = ( SPS ) x ( D/ f )... (I.10) dalam hal ini,
SPS : sensor pixel size D : jarak obyek ke kamera
f : panjang fokus kamera yang digunakan selama pemotretan.
Nilai SPS dari masing-masing kamera dapat dihitung secara manual dengan menggunakan rumus I.11.. Perhitungan nilai SPS dilakukan berdasarkan ukuran dari
20 sensor kamera (PCMOS) yang diperoleh dari spesifikasi kamera dan ukuran dimensi foto.
SPS = 𝑃 𝑐𝑚𝑜𝑠
𝐾 ... (I.11) Keterangan:
P cmos : ukuran dimensi dalam fraksi milimeter k : ukuran dimensi dalam fraksi piksel
I.8.10. Root Mean Square Error (RMSE)
RMSE atau yang dikenal dengan RMS residual menurut ESRI (2006) adalah nilai perbedaan antara nilai sesungguhnya dengan nilai hasil ukuran. RMS residual didapatkan dari proses pembagian antara nilai akar kuadrat total selisih ukuran kuadrat dengan jumlah ukuran yang digunakan. Rumus menghitung RMS residual disajikan pada rumus I.12.
𝑅𝑀𝑆𝐸 = √∑(X1 n −X)2
𝑛 ………...………...(I.12) Keterangan :
RMSE = Root Mean Square Error X = nilai sebenarnya
X1 = nilai hasil ukuran
n = banyak ukuran yang digunakan
I.8.11. Penentuan Volume
Volume batubara pada dasarnya dapat dihitung menggunakan prinsip perhitungan volume dari bagian permukaan batubara yang dibatasi oleh penampang-penampang melintangnya. Perhitungan volume batubara dapat dilakukan dengan beberapa metode, antara lain metode garis kontur, metode irisan melintang (cross section), metode cut and fill . Dalam penelitian ini digunakan penghitungan volume metode cut and fill . Prinsip perhitungan volume batubara menggunakan metode cut and fill adalah menghitung luasan dua penampang serta jarak antara penampang atas dan penampang bawah tersebut. Dengan mengetahui data penampang atas dan
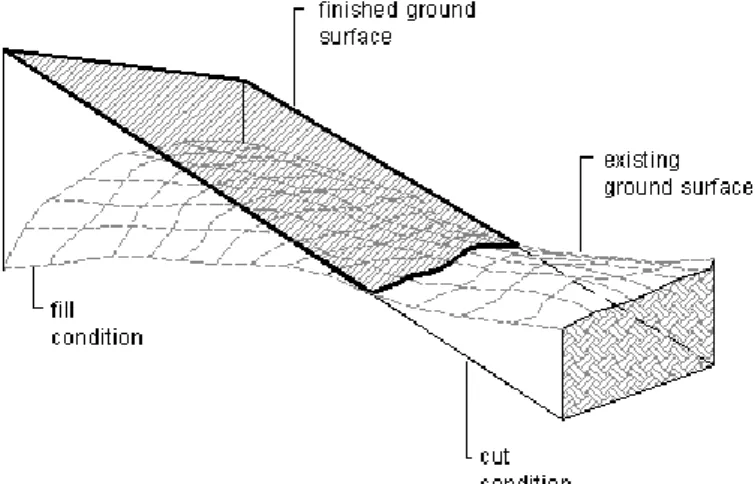
21 penampang bawah, maka dapat dihitung luas masing – masing penampang. Volume dihitung dari DTM yang dibentuk dari jaring-jaring segitiga (TIN). Jaring segitiga inilah yang akan membentuk suatu geometri prisma dari dua surface. Surface dibedakan menjadi dua yaitu design surface dan base surface. Design surface merupakan surface yang akan dihitung volumenya sedangkan base surface merupakan surface yang dijadikan sebagai alas. Kondisi geometri cut and fill dapat dilihat pada gambar I.7.
Gambar I. 7. Kondisi cut and fill (Autodesk, 2016)
Gambar I.7 menunjukan bahwa volume total dari suatu area dapat dihitung dari penjumlahan volume semua prisma. Volume prisma dihitung dengan mengalikan permukaan proyeksi (Ai) dengan jarak antara pusat massa dari dua segitiga yaitu desain surface dan base surface (di). Rumus ini adalah rumus yang paling baik diantara rumus – rumus yang lainnya (Basuki, 2006). Prisma adalah sebuah bangun yang bidang sisi – sisinya berupa bidang datar, sedangkan bidang alas dan atasnya sejajar.
Bentuk rumus prismoida adalah V = 𝐷
6 (A1 + 4M + A2) ...(I.13) Keterangan :
A1, A2 : penampang luar (atas dan bawah) D : jarak antara A1 dan A2
22 Apabila M adalah rata – rata dari A1 dan A2, maka:
V = 𝐷 6 (A1 + 4 A1 + A2 2 + A2)...(I.14) V = D x A1 + A2 2 ...(I.15) I.9. Hipotesis
Hipotesis yang diajukan dalam penelitian ini yaitu volume stockpile batubara menggunakan metode fotogrametri jarak dekat dengan metode pemetaan teristris memiliki perbedaan yang tidak melebihi standar praktis penentuan volume stockpile batubara.