8
2.1 Perancangan Produk Dengan Metode Pahl Dan Beitz
Perancangan merupakan kegiatan awal dari usaha untuk merealisasikan
suatu produk untuk memenuhi kebutuhan. Setelah perancangan selesai maka
kegiatan selanjutnya adalah pembuatan produk. Ada beberapa metode
perancangan yang digunakan oleh perancang salah satunya adalah Metode
Perancangan Pahl dan Beitz. Pahl dan Beitz mengusulkan cara merancang produk
sebagaimana dijelaskan dalam bukunya; Engineering Design : A Systematic
Approach. Cara merancang Pahl dan Beitz tersebut terdiri dari beberapa fase.
Keempat fase tersebut adalah:
1. Perencanaan dan penjelasan tugas
2. Perancangan konsep produk
3. Perancangan bentuk produk
4. Perancangan detail
Setiap fase proses perancangan berakhir pada hasil fase, seperti fase
pertama menghasilkan daftar persyaratan dan spesifikasi perancangan. Hasil
setiap fase kemudian menjadi masukan untuk fase berikutnya dan menjadi umpan
Gambar 2.1 Diagram alur proses perancangan Metode Pahl dan Beitz
(Ginting, Rosnani, Perancangan Produk, 37)
Tugas
Perencanaan dan penjelasan tugas Mengembangkan daftar persyaratan Menjabarkan spesifikasi
Spesifikasi Mengindentifikasi masalah-masalah utama Membuat struktur-struktur fungsi Mencari prinsip-prinsip solusi Membuat variasi konsep
Konsep Mengembangkan struktur produk Memilih lay out awal yang terbaik Memperbaiki lay out
Evaluasi terhadap kriteria teknis dan ekonomis Lay out awal Menentukan struktur produk
Menghilangkan kelemahan dan kekurangan Memeriksa dan memperbaiki jika terjadi kesalahan Memepersiapkan daftar komponen awal dan dokumen Pembuatan produk
Lay out akhir Mempersiapkan dokumen pembuatan Mengembangkan gambar dan daftar detail Menyelesaikan instruksi pembuatan
Doumentasi
Solusi
Melakukan evaluasi terhadap kriteria teknis dan ekonomis
Menentukan bentuk awal, memilih material dan perhitungannya T in g k a ta n d a n p e rb a ik a n P e re n c a n a a n dan pe nj el as an produk P eranc an ga n k on s ep P eranc an ga n bentuk P e ra n c a n g a n de tai l O pti m as i pe m bu ata n O pti m as i lay out, bentuk dan m ater ial O pti m as i prin s ip
2.1.1 Perencanaan dan penjelasan tugas
Tugas fase ini adalah menyusun spesifikasi produk yang mempunyai
fungsi khusus dan karakteristik tertentu untuk memenuhi kebutuhan. Produk ini
dengan fungsi khusus dan karakteristik tertentu merupakan hasil olahan dari
penelitian, survey lapangan dan permintaan masyarakat. Fase pertama ini perlu
dilakukan untuk menjelaskan lebih detail sebelum produk dikembangkan lebih
lanjut. Pada fase ini dikumpulkan semua informasi tentang semua persyaratan atau
requirement yang harus dipenuhi oleh produk dan kendala-kendala yang
merupakan batas-batas produk. Hasil fase ini adalah spesifikasi produk yang
dimuat dalam suatu daftar persyaratan teknis.
2.1.2 Perencanaan konsep produk
Berdasarkan spesifikasi produk hasil fase pertama, dicarilah beberapa
konsep produk yang dapat memenuhi persyaratan-persyaratan dalam spesifikasi
tersebut. Konsep produk tersebut merupakan solusi dari masalah perancangan
yang harus dipecahkan. Beberapa alternatif konsep produk dapat ditemukan.
Konsep produk biasanya berupa gambar skema yang sederhana, tetapi telah
memuat semua. Beberapa alternatif konsep produk kemudian dikembangkan lebih
lanjut dan setelah dievaluasi. Evaluasi tersebut haruslah dilakukan beberapa
kriteria khusus seperti kriteria teknis, kriteria ekonomis dan lain-lain. Konsep
produk yang tidak memenuhi persyaratan-persyaratan dalam spesifikasi produk,
tidak diproses lagi dalam fase-fase berikutnya, sedangkan dari beberapa konsep
produk yang memenuhi kriteria dapat dipilih solusi yang terbaik. Mungkin terjadi,
fase-fase berikutnya. Dari diagram alir cara merancang Pahl dan Beitz dapat
dilihat bahwa fase perancangan konsep produk terdiri dari beberapa langkah.
2.1.3 Perancangan bentuk
Dari diagram alir cara merancang Pahl dan Beitz dapat dilihat bahwa fase
perancangan bentuk terdiri dari beberapa langkah, yang jumlahnya lebih banyak
dari jumlah langkah-langkah pada fase perancangan konsep produk. Pada fase perancangan bentuk ini, konsep produk “diberi bentuk”, yaitu komponen-komponen konsep produk yang dalam gambar skema masih berupa garis atau
batang saja, kini harus diberi bentuk, sedemikian rupa sehingga
komponen-komponen tersebut secara bersama menyusun bentuk produk, yang dalam
geraknya tidak saling bertabrakan sehingga produk dapat melakukan fungsinya.
Konsep produk yang sudah digambarkan pada preliminary layout, sehingga dapat
diperoleh beberapa preliminary layout. Preliminary layout masih dikembangkan
lagi menjadi layout yang lebih baik lagi dengan meniadakan kekurangan dan
kelemahan yang ada dan sebagainya. Kemudian dilakukan evaluasi terhadap
beberapa preliminary layout yang sudah dikembangkan lebih lanjut berdasarkan
kriteria teknis, kriteria ekonomis dan lain-lain yang lebih ketat untuk memperoleh
layout yang terbaik yang disebut definitive layout. Definitive layout telah dicek
dari segi kemampuan melakukan fungsi produk, kekuatan, kelayakan finansial dan
lain-lain.
2.1.4 Perancangan detail
Pada fase perancangan detail, maka susunan komponen produk, bentuk,
dimensi, kehalusan permukaan, material dari setiap komponen produk ditetapkan.
perkiraan biaya sudah dihitung. Hasil akhir fase ini adalah gambar rancangan
lengkap dan spesifikasi produk untuk pembuatan; kedua hal tersebut disebut
dokumen untuk pembuatan produk.
2.2 Dasar-Dasar Sistem Hidrolik
Sistem hidrolik adalah teknologi yang memanfaatkan zat cair biasanya oli,
untuk melakukan gerakan segaris atau putaran. Sistem hidrolik merupakan suatu
bentuk perubahan atau pemindahan daya dengan menggunakan media penghantar
berupa fluida cair untuk memperoleh daya yang besar dari daya awal yang
dikeluarkan. Dimana fluida ini dinaikkan tekannannya oleh pompa pembangkit
tekanan yang kemudian diteruskan ke silinder kerja melalui pipa-pipa atau
selang-selang saluran. Gerakan dari piston silinder kerja yang diakibatkan tekan fluida
dimanfaatkan untuk pergerakan maju mundur.
2.2.1 Kerja, Energi dan Daya
Kerja atau Usaha dalam kehidupan sehari-hari adalah aktivitas yang
dilakukan manusia. Dalam fisika Kerja atau Usaha memiliki definisi yang khusus.
Jika suatu benda diberikan gaya konstan sebesar F dan menyebabkan benda
berpindah jauh s, usaha W yang dilakukan gaya tersebut dinyatakan dengan:
W = F x s
(Young., dan Freedman., Fisika Universitas, 165)
Dimana : F = gaya (N)
s = perpindahan (m), dan
W = usaha (Nm = joule)
Energi adalah kemampuan untuk melakukan usaha. Energi terbagi menjadi
gaya gravitasi bumi yang bekerja pada benda. Energi potensial dinyatakan
dengan:
EP = mgh
(Young., dan Freedman., Fisika Universitas, 194)
Dimana : EP = energy potensial (joule)
w = berat benda (newton) = mg
m = massa benda (kg)
g = percepatan gravitasi (m/s2)
h = tinggi benda (m)
Bentuk energi yang lainnya adalah energi kinetik. Energi kinetik adalah
energi yang dimiliki suatu benda karena gerakannya. Secara umum persamaan
energi kinetik dituliskan sebagai:
EK = ½ mv2
(Young., dan Freedman., Fisika Universitas, 169)
Dimana : EK = energi kinetik
m = massa benda (kg)
v = kecepatan benda (m/s)
Daya didefinisikan sebagai kelajuan usaha atau usaha per satuan waktu.
Daya dituliskan dengan persamaan sebagai berikut:
P = W / t
(Young., and Freedman., Fisika Universitas, 179)
Dimana: P = daya (J/s atau Watt)
W = usaha (Joule)
Mobil, motor, atau mesin-mesin lainnya sering dinyatakan memiliki daya
sekian hp (horsepower) yang diterjemahkan ke dalam Bahasa Indonesia sebagai
daya kuda dengan 1 hp = 746 watt.
Hidrolik dapat didefiniskan sebagai perpindahan daya . Daya Hidrolik
(Hydraulic Power) adalah sama dengan laju aliran dikalikan tekanan. Berikut
adalah rumus mencari daya hidrolik:
(Parr, Andrew., Hidrolika dan Pneumatika Pedoman Untuk Teknisi dan Insinyur, 35)
2.2.2 Torsi
Torsi adalah kemampuan suatu gaya menghasilkan perputaran benda
terhadap suatu poros/sumbu putarnya.
Gambar 2.2 Torsi
Torsi dapat dinyatakan dengan persamaan:
T = F x d
(Young., dan Freedman., Fisika Universitas, 291)
Dimana: T = Torsi (Nm)
F = Gaya (N)
Laju aliran (gpm) x Tekanan (Psi)
Daya = Laju aliran (lpm) x Tekanan (bar) (kW) 600 = Daya 1714 (hp) = Daya
Laju aliran x Tekanan
d
d = Jarak (m)
Dalam sistem imperial, satuannya adalah lbf.ft, sedangkan dalam sistem metrik
satuannya adalah kgf m atau kgf cm, dan dalam SI satuannya adalah Nm.
2.2.3 Aliran (Flow)
Aliran dalam sistem hidrolik dihasilkan dari (Pompa Perpindahan Positif)
Positive Displacement Pump. Hal ini berbeda dari Centrifulgal Pump, yang bukan
perpindahan positif. Ada tiga prinsip penting yang harus dimengerti tentang
Aliran dalam sistem hidrolik, yaitu:
1. Prinsip satu: Aliran menghasilkan gerakan. Untuk pergerakan apapun
dalam sistem hidrolik, aktuator harus disuplai oleh aliran. Seperti pada
gambar di bawah, silinder akak tertarik dan memanjang hanya jika ada
aliran masuk ke saluran B. pergeseran katup control arah akan
mengirimkan aliran baik untuk memperpanjang atau menarik kembali
silnder.
2. Prnsip dua: Laju aliran menentukan kecepatan. Laju aliran biasanya
ditentukan gpm. Gpm ditentukan oleh pompa hidrolik. Merubah aliran
output pompa akan merubah kecepatan aktuator.
3. Prinsip tiga: Dengan laju aliran tertentu, perubahan volume aktuator akan
merubah kecepatan aktuator. Dengan volume yang kecil, siklus aktuator
akan lebih cepat. Misalnya, ada volume yang mengecil pada saat silinder
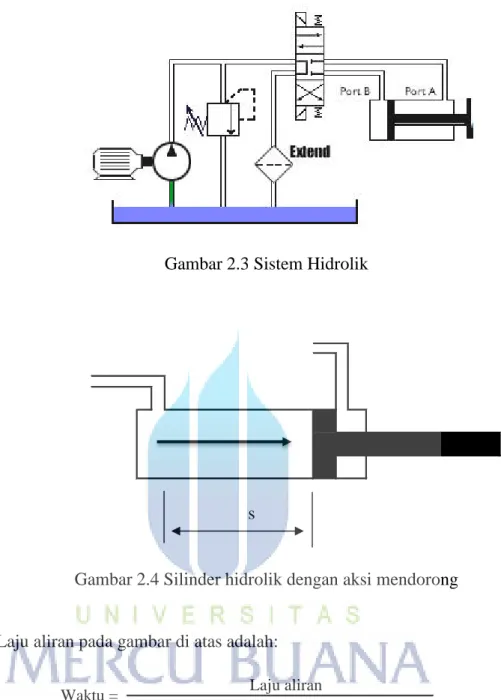
Gambar 2.3 Sistem Hidrolik
Gambar 2.4 Silinder hidrolik dengan aksi mendorong
Laju aliran pada gambar di atas adalah:
(Parr, Andrew., Hidrolika dan Pneumatika Pedoman Untuk Teknisi dan Insinyur, 35)
s
Laju aliran
Luas penampang x Langkah piston (s) piston (A)
Gambar 2.5 Silinder hidrolik dengan aksi menarik
(Parr, Andrew., Hidrolika dan Pneumatika Pedoman Untuk Teknisi dan Insinyur, 35)
Dapat dilihat bahwa waktu yang dibutuhkan antara pada saat
silinder mendorong dan menarik, waktu yang dibutuhkan pada saat
silinder bekerja menarik lebih sedikit daripada saat mendorong.
2.2.4 Tekanan
Tekanan adalah gaya per satuan luas bidang yang ditekan secara tegak
lurus. Tekanan dapat dirumuskan sebagai berikut:
(Parr, Andrew., Hidrolika dan Pneumatika Pedoman Untuk Teknisi dan Insinyur, 16)
Dimana : P = tekanan (N/m2)
F = gaya (N)
A = luas penampang (m2)
Prinsip dasar sistem hidrolik berasal dari hukum pascal, dimana tekanan
dalam fluida statis harus mempunyai sifat-sifat sebagai berikut: s
(Luas penampang piston (A) - x Langkah piston (s) Luas penampang poros (P))
Waktu = Laju aliran
F A P =
1. Tekanan bekerja tegak lurus pada permukaan bidang.
2. Tekanan di setiap titik sama untuk semua arah.
3. Tekanan yang diberikan kesebagian fluida dalam tempat tertutup,
merambat secara seragam ke bagian lain fluida.
Gambar di bawah memperlihatkan dua buah silinder dengan diameter yang
berbeda. Apabila sebuah gaya sebesar F diberikan ke silinder kecil, tekanan P
yang dihasilkan akan diteruskan ke silinder yang lebih besar dan tekanan pada
silinder kecil dan silinder besar adalah sama.
Gambar 2.6 Dua buah silinder yang berbeda luas penampangnya
(Parr, Andrew, Hidrolika dan Pneumatika Pedoman Untuk Teknisi dan Insinyur, 17)
(Young., dan Freedman., Fisika Universitas, 427)
Dimana : P = Tekanan (N/m2)
F1 = Gaya yang bekerja pada silinder kecil (N)
F2 = Gaya yang bekerja pada silinder besar (N)
A1 = Luas penampang silinder kecil (m2)
A2 = Luas penampang silinder besar (m2)
F1 F2 A2 A1 F1 F2 A1 A1 P = =
Tekanan dalam hidrolik terjadi karena ada tahanan pada aliran. Pompa
hidrolik menghasilkan aliran bukan tekanan, jika ada tahanan terhadap fluida yang
dialirkan maka akan menghasilkan tekanan. Seperti contoh pada gambar di
bawah, pada sebuah dongkrak hidrolik, beban sepeda motor yang diangkat
merupakan tahanan dan menghasilkan tekanan pada aliran fluida.
Gambar 2.7 Silinder hidrolik yang bekerja mengangkat beban
Pressure Drop atau Penurunan Tekanan adalah tekanan yang tidak
langsung digunakan untuk menghasilkan kerja. Tekanan itu adalah tekanan yang
dibutuhkan untuk mendorong cairan hidrolik melalui konduktor ke aktuator.
2.2.5 Fluida
Fluida adalah zat-zat yang mampu mengalir dan yang menyesuaikan diri
dapat menahan gaya tangensial atau gaya geser. Semua fluida memiliki suatu
derajat kompresibilitas dan memberikan tahanan kecil terhadap perubahan bentuk.
Fluida dapat digolongkan ke dalam cairan atau gas. Perbedaan-perbedaan
utama dari cairan dan gas adalah;
1. Cairan praktis tak kompresibel, sedangkan gas kompresibel
2. Cairan mengisi volume tertentu dan mempunyai permukaan-permukaan
bebas sedangkan gas dengan massa tertentu mengembang sampai mengisi
seluruh bagian wadah dan tempatnya.
Fluida dapat dikarakteristikkan sebagai; Fluida Newtonian dan Fluida
Non-Newtonian. Fluid newtonian yang memiliki kurva tegangan/regangan yang
linier. Contoh umum dari fluida yang memiliki karakteristik ini adalah air.
Keunikan dari fluida newtonian adalah fluida ini akan terus mengalir sekalipun
terdapat gaya yang bekerja pada fluida, karena viskositas dari suatu fluida
newtonian tidak berubah ketika terdapat gaya yang bekerja dan hanya tergantung
pada temperatur dan tekanan. Sedangkan fluida non-newtonian adalah fluida yang
viskositasnya mengalami perubahan jika terdapat gaya yang bekerja pada fluida
Gambar 2.8 Grafik tegangan geser fluida
(Sumber : L. Streeter, Victor & Wylie, Benjamin., Mekanika Fluida, 9)
Viskositas atau kekentalan suatu fluida adalah sifat yang menentukan
besar daya tahannya terhadap gaya geser. Kekentalan terutama diakibatkan oleh
saling pengaruh antara molekul-molekul fluida. Untuk fluida-fluida biasa seperti
air, minyak, bensin dan udara, tegangan dan laju regangan geser dapat dikaitkan
dengan suatu hubungan dalam bentuk:
(L. Streeter, Victor & Wylie, Benjamin., Mekanika Fluida, 9)
Dimana : τ = tegangan geser μ = viskositas
du/dy = perubahan sudut atau kecepatan sudut
y x T eg ang an du/dz τ Cairan Ideal Zat Cair Ideal
Gradien kecepatan du / dz
du dy μ τ =
dimana konstanta kesebandingannya disimbolkan dengan huruf Yunani μ (mu) dan disebut sebagai viskositas mutlak, viskositas dinamik, atau viskositas saja dari
fluida tersebut.
Dalam sistem satuan SI, tegangan geser dinyatakan dalam N/m2 dan
gradien kecepatan adalah dalam (m/det)/m maka satuan dari viskositas dinamik
adalah:
(R. Munson, Bruce., F. Young Donald.,& H. Okiishi, Theodore., Mekanika Fluida, 25)
Gambar 2.9 Grafik kekentalan dinamik beberapa fluida
(http://www.scribd.com/doc/230224971/Isi-Hidraulik#scribd)
N/m2 N/det
(m/det)/m = m2 = kg/m.det μ =
Perbandingan antara kekentalan dinamik dan kerapatan disebut kekentalan
kinematik, dirumuskan:
(R. Munson, Bruce., F. Young Donald.,& H. Okiishi, Theodore., Mekanika Fluida, 25)
Viskositas kinematik dari cairan sangat dipengaruhi oleh temperatur,
begitu juga viskositas dinamik. Berikut adalah tabel dan grafik dari kekentalan
kinematik dari beberapa jenis fluida.
Tabel 2.1 Kekentalan kinematik dari beberapa jenis fluida
(V. Giles, Ranald., Mekanika Fluida dan Hidraulika, cetakan ke-2, 257)
2.2.6 Komponen – komponen sistem hidrolik beserta simbolnya
Pada umumnya sistem hidrolik didukung oleh 3 komponen utama, yaitu:
1. Unit Tenaga (Power), berfungsi sebagai sumber tenaga. Pada bagian ini,
unit tenaga terdiri atas:
Penggerak awal berupa motor listrik atau motor bakar.
Pompa hidrolik, putaran dari penggerak awal diteruskan oleh sebuah mekanisme pemindah putaran sehingga pompa hidrolik
dapat bekerja. μ kg ρ m.det.kg/m3 ν = = = m2/det Suhu °C (°F) Kerapatan relatif Kekentalan Kinematik m2/det Kerapatan relatif Kekentalan Kinematik m2/det Kerapatan relatif Kekentalan Kinematik m2/det Kerapatan relatif Kekentalan Kinematik m2/det 4.4 (40) 1.000 1.550 0.728 1.50 1.621 0.752 0.905 443 10 (50) 1.000 1.311 0.725 1.37 1.608 0.697 0.900 260 15.6 (60) 0.999 1.130 0.721 1.27 1.595 0.650 0.896 175 21.1 (70) 0.998 0.984 0.717 1.17 1.582 0.604 0.891 116 26.7 (80) 0.997 0.864 0.713 1.09 1.569 0.564 0.888 87.4 32.2 (90) 0.995 0.767 0.709 1.02 1.555 0.520 0.885 64.1 37.8 (100) 0.993 0.687 0.705 0.96 1.542 0.492 0.882 45.7 43.3 (110) 0.991 0.620 0.702 0.89 1.520 0.465 0.874 34.8 48.9 (120) 0.990 0.567 0.866 27.2 65.6 (150) 0.980 0.441 0.865 15.0
Air Pelarut Komersil Karbon Tetrakhlorida Minyak Pelumas Menengah
Tangki hidrolik, berfungsi sebagai penampung cairan hidrolik.
Komponen tambahan lainnya, berupa pressure gauge, relive valve dll.
2. Unit Penggerak (Actuator), berfungsi mengubah tenaga fluida menjadi
tenaga mekanik, Actuator Hidrolik dapat dibedakan menjadi 2 macam
yaitu:
Penggerak Lurus (Liner Actuator): Silinder Hidrolik.
Penggerak Putar : Motor Hidrolik, Rotary Actuator.
3. Unit Pengatur, berfungsi sebagai pengatur gerak sistem hidrolik. Unit ini
biasanya diwujudkan dalam bentuk katup atau valve yang
macam-macamnya adalah sebagai berikut:
Katup Pengarah (Directional Control Valve = DCV)
Katup Pengarah Khusus (Check Valve, Pilot Operated Check
Valve, Pressure Regulator Valve dan Flow Control Valve).
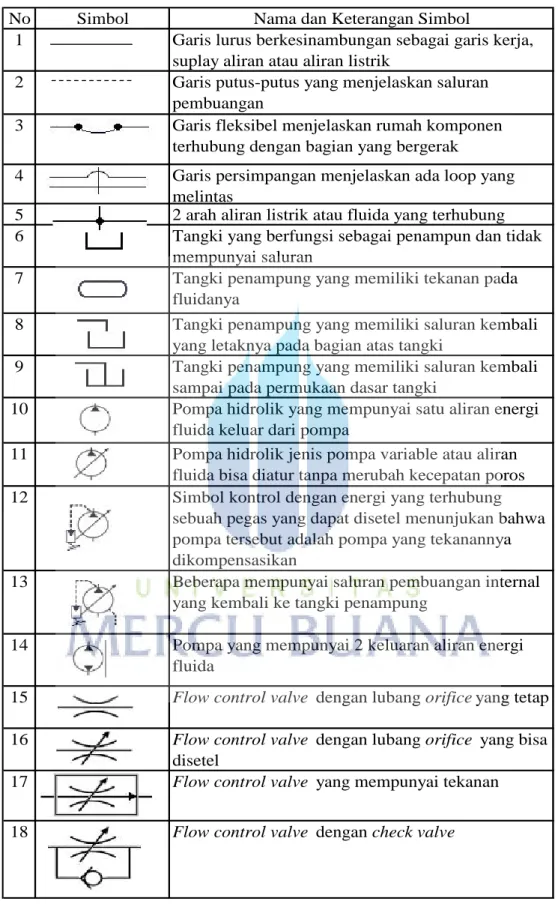
Setiap komponen-komponen hidrolik memiliki symbol-simbolnya masing
untuk memudahkan dalam penggambaran sistem dan perancangan. Di bawah ini
Tabel 2.2 Simbol komponen-komponen hidrolik
No Simbol Nama dan Keterangan Simbol
1 Garis lurus berkesinambungan sebagai garis kerja, suplay aliran atau aliran listrik
2 Garis putus-putus yang menjelaskan saluran pembuangan
3 Garis fleksibel menjelaskan rumah komponen terhubung dengan bagian yang bergerak
4 Garis persimpangan menjelaskan ada loop yang melintas
5 2 arah aliran listrik atau fluida yang terhubung 6 Tangki yang berfungsi sebagai penampun dan tidak
mempunyai saluran
7 Tangki penampung yang memiliki tekanan pada fluidanya
8 Tangki penampung yang memiliki saluran kembali yang letaknya pada bagian atas tangki
9 Tangki penampung yang memiliki saluran kembali sampai pada permukaan dasar tangki
10 Pompa hidrolik yang mempunyai satu aliran energi fluida keluar dari pompa
11 Pompa hidrolik jenis pompa variable atau aliran fluida bisa diatur tanpa merubah kecepatan poros 12 Simbol kontrol dengan energi yang terhubung
sebuah pegas yang dapat disetel menunjukan bahwa pompa tersebut adalah pompa yang tekanannya dikompensasikan
13 Beberapa mempunyai saluran pembuangan internal yang kembali ke tangki penampung
14 Pompa yang mempunyai 2 keluaran aliran energi fluida
15 Flow control valve dengan lubang orifice yang tetap 16 Flow control valve dengan lubang orifice yang bisa
disetel
17 Flow control valve yang mempunyai tekanan 18 Flow control valve dengan check valve
Lanjutan Tabel 2.2 Simbol komponen-komponen hidrolik No Simbol Nama dan Keterangan Simbol
19 Directional Control Valve (Katup Kontrol Arah)
20 Pressure Valve dengan saluran primer dan sekunder
21 Pressure Valve dengan pegas yang dapat disetel
22 Check Valve
23 Motor Penggerak
24 Motor Penggerak Bi-Directional atau Reversible
25 Motor Penggerak yang mempunyai saluran pembuangan ke Tangki Penampung
26 Cylinder Hydraulic Single Action
27 Cylinder Hydraulic Double Action
28 Cylinder Hydraulic Double Rod
29 Saringan Oli (Filter )
30 Saringan Oli (Filter) yang mempunyai saluran by pass
31 Heat Exchanger (Heater )
32 Heat Exchanger (Cooler )
2.3 Motor Penggerak
Sebagai penggerak pompa hidrolik biasa digunakan motor listrik atau
motor bakar. Motor mengubah energi listrik atau kimia menjadi energi mekanik
namun dalam prosesnya energi yang dihasilkan tidak semuanya diubah menjadi
energi baru ada yang hilang karena panas sehingga effesiensi motor tidak bisa
mencapai 100 %. Faktor-faktor yang mempengaruhi efisiensi adalah:
1. Usia 2. Kapasitas 3. Kecepatan 4. Jenis 5. Suhu 6. Beban
Gambar 2.10 Penggambaran energi yang hilang
(http://digilib.its.ac.id/public/ITS-Undergraduate-10424-Presentation.pdf)
Motor listrik merupakan suatu peralatan perubah energi elektromagnetik
yang fungsinya didasari atas gaya yang diberikan antara arus listrik yang masuk
dengan medan magnet yang ditimbulkan. Karena prinsip fungsi tersebut, maka
umumnya motor listrik memiliki efisiensi yang sangat tinggi. Persamaan efisiensi
motor adalah sebagai berikut:
(http://trikueni-desain-sistem.blogspot.com/2013/09/Menghitung-Arus-Motor-AC.html)
Daya Output Daya Input
Untuk motor bakar biasanya efisiensi yang dihasilkan berkisar 75% - 90%
dan persamaan efisiensi untuk motor bakar adalah sebagai berikut:
(Sumber : http://helmidadang.wordpress.com/2012/02/14/efisiensi-motor-bakar/)
Dimana : Qin = Panas yang masuk
Qout = Panas yang keluar
Motor penggerak pada sistem sangat penting karena menjadi sumber
tenaga untuk memutarkan pompa. Untuk instalasi sistem hidrolik sangat penting
untuk menentukan daya motor yang akan digunakan agar sistem dapat bekerja
dengan efektif dan efesien. Cara menentukan besarnya daya motor yang akan
digunakan untuk instalasi sistem hidrolik adalah sebagai berikut:
(Parr, Andrew., Hidrolika dan Pneumatika Pedoman Untuk Teknisi dan Insinyur, 35)
Dimana : Daya Motor dalam satuan kW
Laju Aliran dalam satuan liter/menit
Tekanan pompa dalam satuan bar atau kgf/cm2
2.4 Pompa Hidrolik
Pompa hidrolik berfungsi mengubah energi mekanik menjadi energi
hidrolik. Pompa hidrolik bekerja dengan cara menghisap oli dari tangki hidrolik
dan mendorongnya kedalam sistem hidrolik kedalam sistem hidrolik dalam bentuk
aliran. Aliran fluida/oli ini yang dimanfaatkan dengan car mengubahnya menjadi
tekanan. Tekanan dihasilkan dengan cara menghambat aliran oil dalam sistem Qin - Qout
Qin
Efisiensi = x 100%
Laju Aliran x Tekanan Pompa Daya Motor =
hidrolik. Hambatan ini disebabkan oleh orifice, silinder, motor hidrolik, dan
actuator.
2.4.1 Jenis-jenis pompa hidrolik
Ada beberapa jenis pompa hidrolik yang digunakan menurut cara kerjanya
dan menurut output yang dihasilkan, berikut adalah klasifikasi pompa hidrolik:
1. Non Positive Displacement
Rotodinamic Pump 2. Positive Displacement Pump
Fixed Displacement Pump 1. External Gear Pump
2. Internal Gear Pump
3. Balanced Vane Pump
4. Radial Piston Pump
Variable Displacement Pump 1. Centrifugal Pump
2. Peripheral Pump
2.4.2 Pemilihan Pompa Hidrolik
Pompa hidrolik sangat penting peranannya dalam sistem hidrolik untuk itu
pemilihan pompa yang tepat pada sistem hidrolik harus diperhitungkan. Hal-hal
yang harus diperhatikan sebelum memilih pompa adalah;
1. Tekanan maksimum dalam sistem untuk menghasilkan gaya yang cukup
pada aktuator.
2. Aliran rata-rata yang diperlukan.
4. Pemeliharaan yang ringan
5. Memilih pompa berdasarkan dasar dari aplikasi (gear, vane atau piston)
6. Perhitungan daya pompa sebelumnya harus diketahui agar tidak terjadi
kekeliruan dalam perhitungan. Daya pompa dapat dihitung dengan
menggunakan rumus;
P = Hp.γ.Qs
(Sularso., & Tahara, Haruho. Pompa & Kompresor, 53)
Dimana :
Hp = Head Pompa γ = Berat Jenis Fluida Qs = Kapasitas Silinder
2.4.3 Perbandingan Beberapa Jenis Pompa
Untuk mengetahui perbandinga beberapa jenis pompa dapat dilihat dari
tabel di bawah ini;
Tabel 2.3 Perbandingan beberapa jenis pompa
(Sumber : http://www.scribd.com/doc/230224971/Isi-Hidraulik#scribd)
2.5 Silinder Hidrolik (Hydraulic Cylinder)
Silinder hidrolik adalah sebuah actuator mekanik yang mengasilkan gaya
searah melalui gerakan yang searah. Alat ini menjadi suatu bagian utama dari
sistem hidrolik selain pompa dan motor hidrolik. Silinder hidrolik mendapatkan
gaya dari cairan hidrolik bertekanan. Di dalam silinder hidrolik terdapat piston
Jenis Pompa Tekanan
(kgf/cm2) Kapasitas (Liter/menit) Kecepatan Maksimum (rpm) Efisiensi Roda Gigi 20 - 210 7 - 570 1800 - 7000 75 - 90 Piston Axial 70 - 350 2 - 1700 600 - 6000 85 - 95 Piston Radial 50 - 250 20 - 700 700 - 8000 80 - 92
yang terhubung dengan rod yang dapat bergerak maju dan mundur bergantung
pada sisi mana yang diisi oleh cairan hidrolik bertekanan. Besarnya tekanan yang
digunakan berbeda pada kedua sisi silinder, bergantung pada beban, luas
penampang silinder dan sisi rod-nya.
Gambar 2.11 Bagian-bagian silinder hidrolik
2.5.1 Bagian-Bagian Dari Silinder Hidrolik:
1. Silinder Barel
Bagian ini menjadi sisi terluar dari silinder hidrolik yang posisinya
didesain diam. Proses permesinan pada sisi dalamnya didesain presisi
sesuai dengan komponen lain.
2. Piston
Bagian ini berada pada sisi dalam barel yang berfungsi untuk memisahkan
antara kedua sisi ruang silinder. Berkontak langsung dengan fluida
hidrolik dan memiliki luas penampang tertentu. Luas penampang inilah
yang mengubah tekanan hidrolik menjadi gaya tertentu yang besarnya
3. Piston Rod
Bagian yang berbentuk silinder memanjang ini salah satu ujungnya
terkoneksi langsung dengan piston, dan sisi lainnya terkoneksi dengan
peralatan lain yang digerakkan. Bagian inilah yang meneruskan gaya yang
timbul akibat tekanan fluida hidrolis ke alat lain yang terhubung.
4. Sistem Seal/Gland
Beberapa bagian dari silinder hidrolik terpasang sistem seal yang
umumnya berbahan karet, untuk mencegah kebocoran fluida hidrolik.
Pada sisi piston terpasang seal untuk mencegah fluida kerja berpindah dari
sisi satu ke yang lainnya, sehingga dapat mengganggu kerja silinder
hidrolik. Pada sisi piston rod terpasang sistem seal yang fix pada sis barel
sebelah dalam untuk mencegah kebocoran fluida hidrolik yang berada
pada ruang sisi piston rod.
2.5.2 Menghitung Kecepatan Silinder
Kecepatan silinder perlu dihitung untuk mengetahui lamanya silinder
bekerja, rumusnya adalah sebagai berikut;
(Parr, Andrew., Hidrolika dan Pneumatika Pedoman Untuk Teknisi dan Insinyur, 42)
Dimana : Q = Debit aliran (m3/s)
v = Kecepatan silinder (m/s)
A = Luas penampang silinder hidrolik (m2)
Q A
2.6 Directional Control Valve (Katup Kontrol Arah)
Directional Control Valve atau Katup Kontrol Arah berfungsi untul
mengontrol atau mengarahkan aliran fluida dan mengaturnya dalam arah yang
diinginkan. Katup ini juga digunakan untuk menghentikan atau memulai aliran
fluida. Arah katup hidrolik memiliki dua atau lima jalur dimana merekan
mengarahkan aliran fluida.
Gambar 2.12 Directional Control Valve
(sumber : http://enda-wahyu.blogspot.com/p/blog-page_20.html)
Directional Control Valve atau Katup Konrol Arah di desain berdasarkan
jumlah posisi saluran yaitu saluran penghubung dan bagaimana katup itu
digerakkan. Sebuah Katup Kontrol Arah empat arah akan memiliki empat saluran:
P, T, A dan B. Ada banyak cara untuk menggerakkan katup kontrol arah
diantaranya: dengan tombol, tuas tangan, kaki pedal, mekanik, hidrolik, udara,
Gambar 2.13 Penggerak Katup Kontrol Arah
Katup kontrol arah juga didesain sebagai katup normally open atau katup
normally closed.
Gambar 2.14 Katup kontrol arah normally open dan normally closed
2.7 Flow Control Valve (Katup Pengarah Khusus)
Katup pengarah khusus adalah katup yang menerima perintah dari luar
untuk melepas, menghentikan atau mengarahkan fluida yang melalui katup
tersebut. Macam –macam katup pengarah khusus adalah sebagai berikut;
1. Check Valve adalah katup satu arah, berfungsi sebagai pengarah aliran dan
2. Pilot Operated Check Valve, Katup ini dirancang untuk aliran cairan
hidrolik yang dapat mengalir bebas pada satu arah dan menutup pada arah
lawannya, kecuali ada tekanan cairan yang dapat membukanya.
3. Katup Pengatur Tekanan, Tekanan cairan hidrolik diatur untuk berbagai
tujuan misalnya untuk membatasi tekanan operasional dalam sistem
hidrolik, untuk mengatur tekanan agar penggerak hidrolik dapat bekerja
secara berurutan, untuk mengurangi tekanan yang mengalir dalam saluran
tertentu menjadi kecil.
2.8 Pressure Control (Pengatur Tekanan)
Perhatian utama dalam sistem hidrolik adalah mengontrol arah aliran dan
besarnya tekanan. Salah satu kesalahpahaman adalah bahwa tekanan diatur oleh
lubang orifis atau alat pengontrol aliran. Hal tersebut adalah tidak benar. Untuk
keakuratan pengontrolan tekanan, ada 6 tipe kontrol tekanan telah dikembangkan.
Keenam pengontrol tekanan tersebut adalah:
1. Relief valve, berfungsi untuk membuang fluida hidrolik ke tangki
penyimpanan fluida, apabila tekanan fluida lebih tinggi dari nilai yang
ditentukan.
2. Unloading valve, adalah katup control tekanan normally closed yang
mengarahkan aliran ke tangki ketika tekanan di loaksi itu mencapai tingkat
yang telah ditentukan.
3. Sequence valve, berfungsi untuk mengatur sekuen pada sirkuit hidrolik,
seperti contohnya pada saat menggunakan beberapa silinder hidrolik, yaitu
untuk memastikan beberapa silinder hidrolik telah maju penuh sebelum
4. Reducing valve, adalah katup kontrol normally open digunakan untuk
membatasi tekanan.
5. Counterbalance valve, adalah katup tekanan normally closed digunakan
bersama silinder untuk mengatasi beban atau potensial kelebihan beban.
2.9 Pipa dan Selang Hidrolik
Fluid conductor adalah bagian-bagian dari sistem hidrolik yang digunakan
untuk membawa fluida ke semua berbagai komponen dalam sirkuit hidrolik. Jenis
konduktor meliputi: Selang hidrolik dan pipa baja.
2.9.1 Selang hidrolik
Selang hidrolik digunakan dalam aplikasi dimana jalannya aliran fluida
memerlukan saluran yang lentur atau menekuk. Dalam mempertimbangkan
penggunaan selang yang pertama harus melihat tekanan sistem, kecepatan,
kompayibilitas cairan dan kondisi lingkungan. Konstruksi selang telah dibakukan
oleh Society of Automative Insinyur di bawah SAE J5-17, dikenal sebagai seri R.
Tekanan selang biasanya dinilai dari faktor keamanan 4 sampai 1. Berbagai jenis
dan besarnya kekuatan selang membuat selang mempunyai tingkat tekanan
spesifik. Penambahan kekuatan mungkin bisa menggunakan serat alam dan kawat
logam. Penguatan dapat dikepang atau dibuat spiral. Ukuran selang yang
dibutuhkan tergantung pada volume dan kecepatan aliran fluida. Tidak seperti
pipa dan tube, ukuran selang dilihat dari diameter dalamnya. Umur selang dapat
bertahan lama, tetapi semua jenis karet perlahan-lahan kualitasnya memburuk
akbiat kontak dengan berbagai zat, seperti pelarut, air, sinar matahari, panas, dll.
Selang tidak dapat tahan lama seperti konduktor logam dan harus diganti setiap
Gambar 2.16 Selang Hidrolik
(sumber : http://www.agungjayamandiri.com/)
2.9.2 Pipa Hidrolik
Pipa baja adalah konduktor fluida yang sering digunakan dan menjadi
standar poin untuk kekuatan dan biaya. Namun lebih sulit dirakit karena
dibutuhkan pengelasan untuk memberikan perlindungan maksimal terhadap
kebocoran. Hal tersebut juga menyebabkan tambahan biaya untuk memastikan
sistem bebas terkontaminasi pada saat beroperasi. Pipa di spesifikasikan
berdasarkan diameter luarnya, tetapi kapasitas aliran yang sebenarnya ditentukan
berdasarkan wilayah bagian dalamnya.
Gambar 2.17 Pipa Hidrolik
2.10 Head Zat Cair
Pada penampang di bawah zat cair mempunyai tekanan statis p (dalam
kgf/m2), kecepatan rata-rata v (dalam m/s), dan ktinggian Z (dalam m). Maka zat
cair tersebut mempunyai head total H (dalam m) dapat dinyatakan sebagai berikut,
(Sularso., & Tahara, Haruho. Pompa & Kompresor, 3)
Gambar 2.18 Aliran melalui pipa
(Sumber : Pompa& Kompresor, 1987)
2.11 Kerugian Head (Head Losses)
Aliran fluida yang melalui pipa akan selalu mengalami kerugian head. Hal
ini disebabkan oleh gesekan yang terjadi antara fluida dengan dinding pipa atau
perubahan kecepatan yang dialami oleh aliran fluida (kerugian kecil). Kerugian ini
terdiri dari;
1. Kerugian Major (Major Losses)
2. Kerugian Minor (Minor Losses)
P v2 γ g H = + + Z Pipa v P Z
2.11.1 Kerugian Major (Major Losses)
Major Losses merupakan kehilangan tekanan karena gesekan pada dinding
pipa yang mempunyai luas penampang yang tetap yang yerjadi dalam pipa.
Besarnya kerugian head major ini dapat dihitung dengan menggunakan rumus
persamaan Darcy – Weisbach yaitu;
(Sularso., & Tahara, Haruho. Pompa & Kompresor, 28)
Dimana : λ : faktor gesekan L : panjang pipa (m)
D : diameter dalam pipa (m)
v : kecepatan rata-rata fluida (m/s)
g : gravitasi (m/s2)
Untuk mengetahui besarnya faktor gesekan perlu dicari terlebih dahulu
besarya bilangan Reynolds, dimana;
(Sularso., & Tahara, Haruho. Pompa & Kompresor, 28)
Dimana: Re = Bilangan Reynolds
v = Kecepatan aliran fluida (m/s)
D = Diameter selang (m)
ν = Viskositas kinmatik (m2 /s)
Jika Re < 2300, aliran bersifat laminer.
Jika Re < 4000, aliran bersifat turbulen.
λ x L x v2 D x 2g HL = ν D v Re =
Jika Re = 2300 – 4000, daeran transisi, dimana aliran dapat bersifat laminer atau
turbulen.
Koofisien gesek aliran laminer dapat dicari dengan menggunakan rumus;
(Sularso., & Tahara, Haruho. Pompa & Kompresor, 29)
Sedangkan untuk aliran turbulen, menghitung koofisien gesek dapat
menggunakan rumus Formula Darcy
(Sularso., & Tahara, Haruho. Pompa & Kompresor, 29)
Dimana D adalah diameter dalam pipa.
Gambar 2.19 Diagram Moody untuk mencari koofisien gesek
(http://almer-farhan.blogspot.com/2012/04/cfd-asistensi-ke-2-kelompok-7.html) 64 Re λ = 0,0005 D λ = 0,020 +
2.11.2 Kerugian Minor (Minor Losses)
Kerugian minor merupakan kerugian gesekan yang terjadi pada tiap katup
atau fitting, seperti tee- elbow dan bengkokan (bends) yang besarnya sama
dengan:
(Sularso., & Tahara, Haruho. Pompa & Kompresor, 38)
Dimana, fv = Koofisien kerugian katup, tee dll
v = Kecepatan rata-rata aliran (m/s)
Hlminor = Kerugian Minor
Tabel 2.4 Tabel Koofisien Gesek Untuk Katup dan Fitting
(Sumber : http://www.scribd.com/doc/230224971/Isi-Hidraulik#scribd)
2.11.3 Kerugian Total (Head Losses Total)
Head Losses Total adalah jumlah antara Major Losses dan Minor Losses. v2
2g Hlminor = fv
Hloss major Hlminor