55 BAB 4
HASIL DAN BAHASAN 4.1 Kerangka Percobaan
Percobaan dilakukan dengan menggunakan dua buah objek berbeda, seperti yang telah dijelaskan pada bab 3. Berikut ini adalah kerangka dari percobaan yang dilakukan untuk menguji performa sistem:
Gambar 4.1 Perlakuan Objek 1
Terdapat enam kondisi standar yang digunakan yaitu kondisi 1-6. Pada kondisi 1-3 terdapat satu buah objek 1 dan pada kondisi 4-6 terdapat dua buah objek 1. Tanda petik diatas X dan/atau Z menunjukkan bahwa nilai tersebut berbeda dengan nilai X dan/atau Z dari kondisi sebelumnya. Sedangkan angka 1 dan 2
56 pada X dan/atau Z untuk menunjukkan bahwa objek I dan II diletakkan pada posisi yang berbeda pada kondisi yang sama.
Kondisi 1-6 diambil gambarnya pada tiga intensitas cahaya yang berbeda untuk melihat pengaruh intensitas cahaya pada performa sistem. Kondisi 1-3 dilakukan untuk mencoba kemampuan sistem dalam mendeteksi dan mengestimasi posisi satu buah objek dengan nilai X dan/atau Z yang berbeda, sedangkan kondisi 4-6 untuk mencoba kemampuan sistem dalam mendeteksi dan mengestimasi posisi objek jika terdapat lebih dari satu objek pada saat bersamaan dengan nilai X dan/atau Z yang berbeda.
Selain itu sistem juga dicoba untuk mendeteksi dan mengestimasi posisi dari objek dengan ukuran yang berbeda, yaitu objek 2 dan objek 3. Objek 3 adalah objek 1 dengan sisi permukaan yang berbeda. Berikut ini adalah kerangka percobaan untuk objek 2 dan objek 3:
Gambar 4.2 Perlakuan Objek 2 dan Objek 3
Pada bagian akhir, waktu yang dibutuhkan untuk menyelesaikan beberapa proses juga dievaluasi, yaitu median filtering, ELAS, rekonstruksi 3D dan DBSCAN. Untuk menjawab masalah yang disebutkan pada bab 1 mengenai waktu yang diperlukan untuk proses stereo matching dan juga menganalisa kemungkinan untuk mempersingkat waktu processing dari sistem.
4.2 Prosedur Operasional 4.2.1 Pengambilan Gambar
• Koneksikan minoru 3D webcam dengan notebook • Jalankan program MATLAB
• Buka dan jalankan file CV.m
• Tunggu hingga window preview dari kedua kamera muncul
Gambar 4.3 Video Preview
• Program akan menunggu input berupa penekanan salah satu tombol keyboard, untuk mengambil dan menyimpan gambar
Gambar 4.4 Paused
• Gambar akan disimpan pada direktori yang sudah ditentukan pada variabel pathName, dengan nama dan format file dataL.jpg untuk gambar kiri dan dataR.jpg untuk gambar kanan.
4.2.2 Pemrosesan Gambar
58 • Buka dan jalankan file StereoVision.m. Akan muncul sebuah window
figure seperti berikut ini:
Gambar 4.5 Tampilan Awal
• Klik tombol Load images from files ... yang berada di kiri bawah window untuk memilih input gambar yang digunakan. Input pertama untuk gambar kiri dan input kedua untuk gambar kanan.
• Program akan mengecek gambar input, jika nama dan direktori yang sama dimiliki oleh kedua gambar input maka program akan berhenti dan perlu dilakukan input ulang. Selain itu program juga akan mengecek ukuran dari kedua gambar input, jika ukurannya berbeda maka program juga akan berhenti dan perlu dilakukan input ulang.
Gambar 4.7 Error Dialog; tampil selama 2 detik
• Program akan memproses gambar input, setelah selesai melakukan proses maka window awal akan diperbaharui. Selain itu akan ditampilkan hasil dari setiap proses yang ada pada window figure yang baru.
Gambar 4.8 Figure 1 (Grayscale & Disparity map) Disparity map Grayscale
60
Gambar 4.9 Figure 2 (Median Filtering)
Gambar 4.11 Figure 4 (3D Reconstruction)
62
Gambar 4.13 Figure 6 (DBSCAN)
• Untuk hasil estimasi posisi objek dapat dilihat pada command window dari program MATLAB.
• Jumlah objek yang terdeteksi terlihat dari jumlah elemen variabel Xmin, Xmax atau Z. Pada Gambar 4.14 ada dua objek yang terdeteksi. Jika tidak ada objek yang terdeteksi maka tampilan pada command window adalah:
Gambar 4.15 Nol Objek
4.3 Implementasi
Berikut ini adalah gambar dari setiap kondisi yang telah dijelaskan pada bagian kerangka percobaan diatas:
64
Gambar 4.17 Objek 1 Kondisi 2
Gambar 4.18 Objek 1 Kondisi 3
Gambar 4.20 Objek 1 Kondisi 5
Gambar 4.21 Objek 1 Kondisi 6
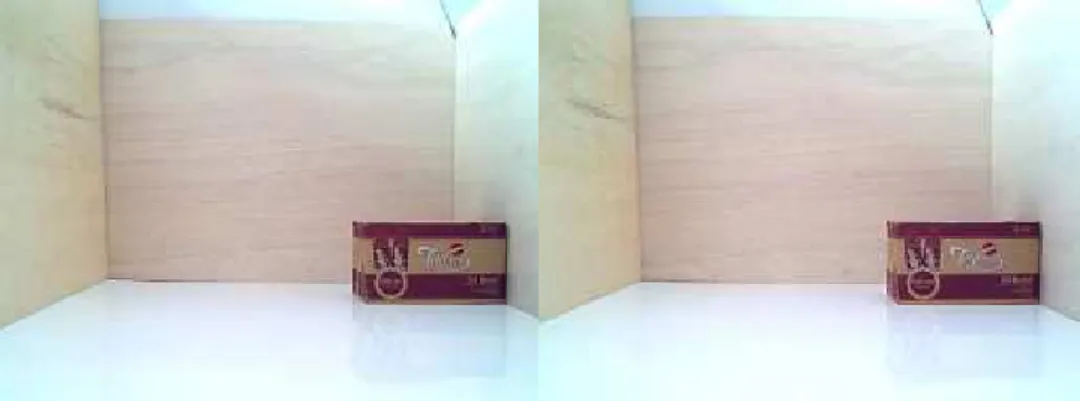
Gambar disebelah kiri adalah gambar dari kamera kiri dan gambar disebelah kanan adalah gambar dari kamera kanan. Gambar-gambar diatas diambil dengan rentang intensitas cahaya 158-245 lux. Intensitas cahaya dinyatakan dalam rentang nilai karena gambar diambil diluar ruang sehingga intensitas cahaya berasal dari matahari dan nilainya tidak dapat dijaga. Dua rentang nilai intensitas cahaya yang lain adalah 1666-1805 lux dan 6-47 lux. Berikut ini perbandingan hasil gambar kamera kiri pada ketiga rentang nilai cahaya untuk kondisi 1 dan 4:
66
Gambar 4.22 Komparasi Kondisi 1
Gambar 4.23 Komparasi Kondisi 4
Selain itu sistem juga dicoba untuk mendeteksi dan mengestimasi objek dengan ukuran dan warna yang berbeda (Objek 2) serta objek yang sama, namun dengan sisi permukaan yang berbeda (Objek 3) dalam tiga kondisi, yaitu:
Gambar 4.24 Objek 2 Posisi 1
Gambar 4.25 Objek 2 Posisi 2
68
Gambar 4.27 Objek 3 Posisi 1
Gambar 4.28 Objek 3 Posisi 2
Gambar 4.29 Objek 3 Posisi 3
Untuk pengambilan gambar ini dilakukan pada hari yang berbeda dengan rentang intensitas cahaya 1508-1615 lux.
4.4 Evaluasi Hasil Percobaan
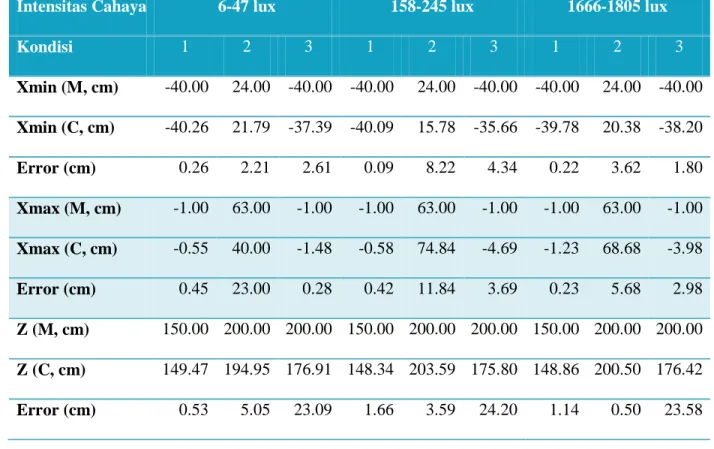
Hasil dari percobaan dengan menggunakan gambar-gambar diatas ditampilkan dalam tabel-tabel berikut ini:
7
0
Intensitas Cahaya 6-47 lux 158-245 lux 1666-1805 lux
Kondisi 1 2 3 1 2 3 1 2 3 Xmin (M, cm) -40.00 24.00 -40.00 -40.00 24.00 -40.00 -40.00 24.00 -40.00 Xmin (C, cm) -40.26 21.79 -37.39 -40.09 15.78 -35.66 -39.78 20.38 -38.20 Error (cm) 0.26 2.21 2.61 0.09 8.22 4.34 0.22 3.62 1.80 Xmax (M, cm) -1.00 63.00 -1.00 -1.00 63.00 -1.00 -1.00 63.00 -1.00 Xmax (C, cm) -0.55 40.00 -1.48 -0.58 74.84 -4.69 -1.23 68.68 -3.98 Error (cm) 0.45 23.00 0.28 0.42 11.84 3.69 0.23 5.68 2.98 Z (M, cm) 150.00 200.00 200.00 150.00 200.00 200.00 150.00 200.00 200.00 Z (C, cm) 149.47 194.95 176.91 148.34 203.59 175.80 148.86 200.50 176.42 Error (cm) 0.53 5.05 23.09 1.66 3.59 24.20 1.14 0.50 23.58
7
1
Intensitas Cahaya 6-47 lux 158-245 lux 1666-1805 lux
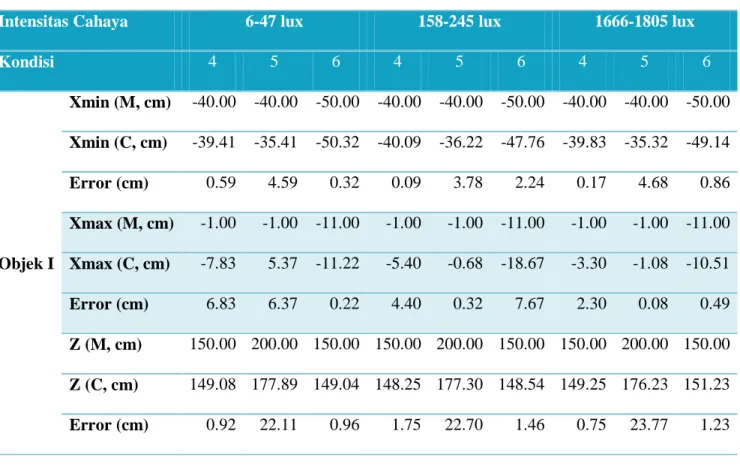
Kondisi 4 5 6 4 5 6 4 5 6 Objek I Xmin (M, cm) -40.00 -40.00 -50.00 -40.00 -40.00 -50.00 -40.00 -40.00 -50.00 Xmin (C, cm) -39.41 -35.41 -50.32 -40.09 -36.22 -47.76 -39.83 -35.32 -49.14 Error (cm) 0.59 4.59 0.32 0.09 3.78 2.24 0.17 4.68 0.86 Xmax (M, cm) -1.00 -1.00 -11.00 -1.00 -1.00 -11.00 -1.00 -1.00 -11.00 Xmax (C, cm) -7.83 5.37 -11.22 -5.40 -0.68 -18.67 -3.30 -1.08 -10.51 Error (cm) 6.83 6.37 0.22 4.40 0.32 7.67 2.30 0.08 0.49 Z (M, cm) 150.00 200.00 150.00 150.00 200.00 150.00 150.00 200.00 150.00 Z (C, cm) 149.08 177.89 149.04 148.25 177.30 148.54 149.25 176.23 151.23 Error (cm) 0.92 22.11 0.96 1.75 22.70 1.46 0.75 23.77 1.23
7
2
Intensitas Cahaya 6-47 lux 158-245 lux 1666-1805 lux
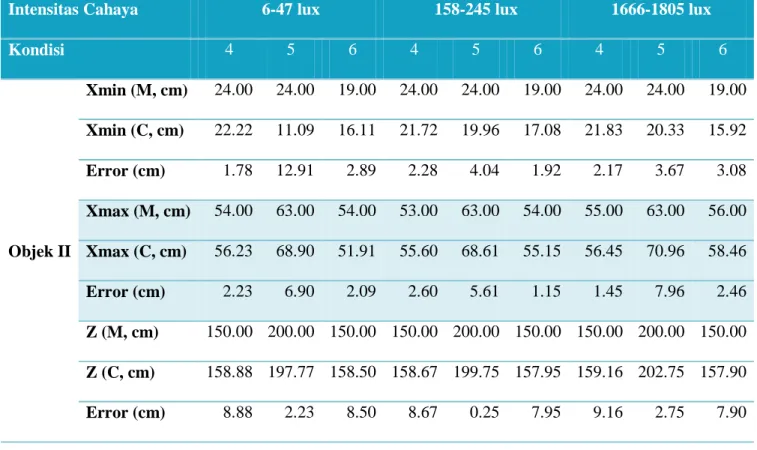
Kondisi 4 5 6 4 5 6 4 5 6 Objek II Xmin (M, cm) 24.00 24.00 19.00 24.00 24.00 19.00 24.00 24.00 19.00 Xmin (C, cm) 22.22 11.09 16.11 21.72 19.96 17.08 21.83 20.33 15.92 Error (cm) 1.78 12.91 2.89 2.28 4.04 1.92 2.17 3.67 3.08 Xmax (M, cm) 54.00 63.00 54.00 53.00 63.00 54.00 55.00 63.00 56.00 Xmax (C, cm) 56.23 68.90 51.91 55.60 68.61 55.15 56.45 70.96 58.46 Error (cm) 2.23 6.90 2.09 2.60 5.61 1.15 1.45 7.96 2.46 Z (M, cm) 150.00 200.00 150.00 150.00 200.00 150.00 150.00 200.00 150.00 Z (C, cm) 158.88 197.77 158.50 158.67 199.75 157.95 159.16 202.75 157.90 Error (cm) 8.88 2.23 8.50 8.67 0.25 7.95 9.16 2.75 7.90
7
3
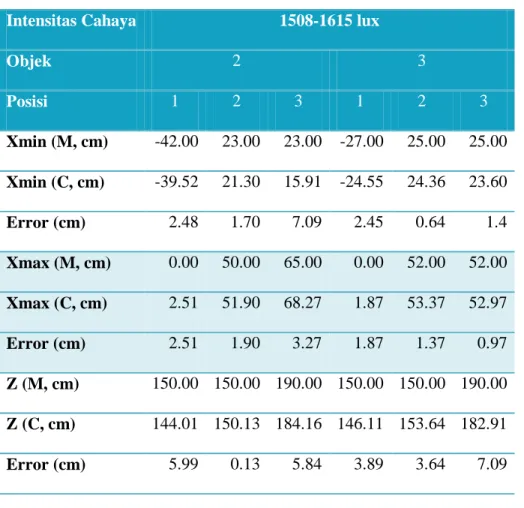
Intensitas Cahaya 1508-1615 lux
Objek 2 3 Posisi 1 2 3 1 2 3 Xmin (M, cm) -42.00 23.00 23.00 -27.00 25.00 25.00 Xmin (C, cm) -39.52 21.30 15.91 -24.55 24.36 23.60 Error (cm) 2.48 1.70 7.09 2.45 0.64 1.4 Xmax (M, cm) 0.00 50.00 65.00 0.00 52.00 52.00 Xmax (C, cm) 2.51 51.90 68.27 1.87 53.37 52.97 Error (cm) 2.51 1.90 3.27 1.87 1.37 0.97 Z (M, cm) 150.00 150.00 190.00 150.00 150.00 190.00 Z (C, cm) 144.01 150.13 184.16 146.11 153.64 182.91 Error (cm) 5.99 0.13 5.84 3.89 3.64 7.09
74 dengan,
• M = hasil pengukuran menggunakan alat ukur dari objek yang terlihat pada gambar
• C = hasil pengukuran menggunakan sistem dengan input gambar kiri dan kanan
• Xmin = Nilai terkecil dari jarak objek terhadap kamera sejajar sumbu horizontal (X)
• Xmax = Nilai terbesar dari jarak objek terhadap kamera sejajar sumbu horizontal (X)
• Z = jarak objek terhadap kamera tegak lurus sumbu horizontal (X) • Nilai Xmin dan Xmax negatif menunjukkan objek berada disebelah kiri
kamera
• Nilai Xmin dan Xmax positif menunjukkan objek berada disebelah kanan kamera
• Untuk gambar yang terpotong penulis mengambil nilai Xmax (M) yang terkecil (bagian objek terdapat/terlihat pada gambar kiri dan kanan). Terdapat beberapa nilai yang Xmax yang sedikit berbeda (±1cm) dari Objek II antar range intensitas pada kondisi yang sama akibat adanya pergeseran posisi kamera yang sangat kecil tanpa penulis sadari ketika proses pengambilan gambar.
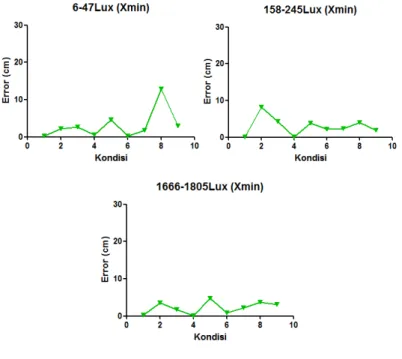
Untuk memudahkan proses evaluasi terhadap hasil percobaan maka nilai error dari tabel-tabel diatas direperesentasikan dalam bentuk grafik sebagai berikut:
Gambar 4.30 Xmin
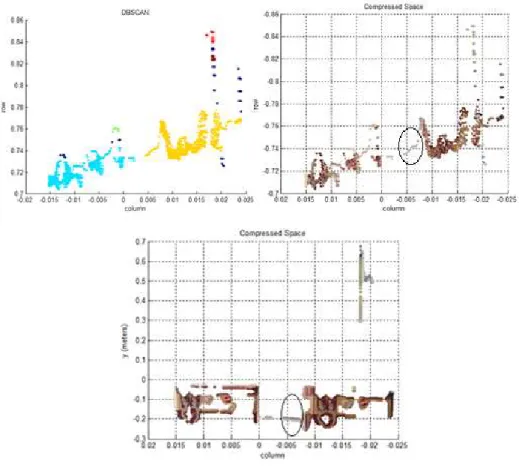
Setiap grafik terdiri dari 9 kondisi, yaitu kondisi 1-6 seperti yang terdapat pada tabel dan 3 kondisi tambahan untuk menyatakan objek II pada kondisi 4-6. Dari grafik Xmin terdapat 2 kondisi yang memiliki error lebih besar dibandingkan dengan kondisi yang lainnya, yaitu kondisi 8 dengan intensitas cahaya 6-47 lux dan kondisi 2 dengan intensitas cahaya 158-245 lux. Hal ini terjadi akibat adanya noise yaitu titik 3D yang bukan merupakan bagian dari objek, namun terdeteksi sebagai bagian objek. Untuk lebih jelasnya bisa melihat dari hasil proses yang dilalui sistem yang memiliki hubungan langsung dengan nilai Xmin yang terdeteksi, seperti proses clustering, 3D reconstruction dan disparity map. Berikut ini adala hasil untuk kondisi 8, dengan kata lain objek II dari kondisi 5 dengan intensitas cahaya 6-47 lux:
76
Gambar 4.31 Hasil Kondisi 5
Terlihat dari gambar diatas pada hasil deteksi objek II terdapat pula titik 3D yang bukan merupakan bagiannya. Titik 3D yang bukan merupakan bagian objek ini berasal dari edge yang terbentuk dari persambungan antar papan yang digunakan untuk membentuk lingkungan pada saat perancangan. Hal ini bisa dilihat dari disparity map berikut:
Tepi-tepi ini sebenarnya sudah dikurangi menggunakan median filter 3x3, sebelum melakukan deteksi tepi. Ukuran filter, merupakan filter yang paling efektif, karena jika menggunakan filter yang lebih besar maka tepi pada benda juga akan tereliminasi.
Penjelasan yang sama juga berlaku untuk kondisi 2 dengan intensitas cahaya 158-245 lux, seperti yang terlihat pada gambar berikut ini:
78
Gambar 4.34 Xmax
Untuk grafik Xmax nilai error, nilai yang paling mencolok adalah kondisi 2 dengan 6-47 lux, hasil dari proses untuk kondisi ini adalah:
Dari hasil rekonstruksi 3D (compressed space) terlihat bahwa hanya setengah bagian objek yang berhasil direkonstruksi, hal ini disebabkan oleh disparity map dari kondisi adalah sebagai berikut:
Gambar 4.36 Disparity Map Kondisi 2 (6-47lux)
Disparity map yang diperoleh tampak seperti pada gambar diatas karena support point hanya bisa ditemukan pada daerah tersebut. Untuk lebih jelasnya dapat dilihat pada hasil pendeteksian tepi yang merupakan input untuk membentuk disparity map. Beriku ini adalah hasil deteksi tepi pada gambar kiri dan kanan:
80
Gambar 4.38 Tepi Gambar Kanan Kondisi 2
Secara kasat mata bisa terlihat hanya ada beberapa tepi dari objek yang berada pada kedua gambar, baik gambar kiri maupun gambar kanan, dengan bagian yang dominan adalah bagian kiri dari objek.
Grafik berikutnya adalah error dari Z, sebagai berikut ini:
Ada dua kondisi yang menarik yaitu kondisi 7 (Objek II Kondisi 4) dan 9 (Objek II Kondisi 6). Kedua kondisi ini memiliki nilai error yang hampir sama. Hal ini diakibatkan karena adanya sisi benda yang memiliki kedalaman lebih besar terlihat pula oleh kamera, untuk lebih jelasnya bisa dilihat pada gambar dibawah ini:
Gambar 4.40 Disparity Map Kondisi 4 & 6 (158-245lux)
Karena nilai Z pada sistem ini merupakan rata-rata dari nilai Z semua titik 3D sebuah objek, maka tingkat keakurasian pun menurun.
Perlu diketahui juga, semakin jauh benda dari kamera perbedaan nilai disparity akan menghasilkan perbedaan nilai Z yang lebih besar. Untuk membuktikan pernyataan ini bisa dilihat dari disparity map kondisi 5 dan kondisi 6, sebagai berikut ini:
82
Gambar 4.41 Disparity Map Kondisi 5 (158-245lux)
Gambar 4.42 Disparity Map Kondisi 6 (158-245lux)
Pada kedua kondisi terdapat perbedaan nilai disparity yang sama, yaitu sebesar ±3 satuan, namun pada kondisi 5 hal ini mengakibatkan perbedaan nilai error sebesar 22.45cm sedangkan pada kondisi 6 hanya 6.49cm.
Dua kondisi lain yang juga menarik adalah kondisi 3 dan 5 Kedua kondisi ini memiliki nilai error yang lebih besar dibanding kondisi yang lainnya. Karena nilai Z dipengaruhi secara langsung oleh nilai disparity, maka yang menjadi perhatian utama dalam menjelaskan nilai error ini adalah disparity map dari kedua kondisi pada setiap intensitas cahaya. Berikut ini adalah disparity map dari kedua kondisi tersebut:
84
Gambar 4.44 Disparity Map Kondisi 5
Dari disparity map kondisi 5 terlihat bahwa nilai disparity dari objek yang berada disebelah kiri kamera lebih besar dibandingkan dengan nilai disparity dari objek yang berada disebelah kanan kamera. Perbedaan nilai disparity ini tidak terlalu besar berkisar pada rentang 3-4 satuan. Namun perbedaan nilai ini akan menghasilkan error yang cukup berarti pada saat menentukan kedalaman objek dalam satuan cm, yaitu pada kisaran 20cm.
Untuk menunjukkan apakah nilai disparity yang diperoleh tepat atau tidak, penulis melakukan overlay dari gambar kiri dan kanan. Overlay dilakukan pada gambar kondisi 5, karena pada kondisi inilah terdapat objek yang berada di kiri dan kanan kamera yang dapat dijadikan bahan perbandingan. Hasil dari overlay ini berupa gambar anaglyph. Berikut ini adalah hasil dari overlay tersebut:
Gambar 4.45 Anaglyph Kondisi 5 (6-47lux)
86
Gambar 4.47 Anaglyph Kondisi 5 (1666-1805lux)
Dari ketiga gambar anaglyph diatas terlihat bahwa disparity (perbedaan posisi) dari objek yang berada disebelah kiri kamera sedikit lebih besar dibandingkan dengan disparity dari objek yang berada disebelah kanan kamera. Namun, menurut dasar teori yang ada, disparity dari objek yang memiliki kedalaman yang sama adalah sama. Semakin besar kedalamannya atau semakin jauh benda dari kamera, semakin kecil disparity-nya dan sebaliknya semakin kecil kedalamannya atau semakin dekat benda ke kamera, semakin besar disparity-nya. Dari hasil ini diambil kesimpulan sementara bahwa gambar yang dihasilkan oleh minoru 3D webcam memilki kecenderungan untuk menghasilkan disparity yang lebih besar jika objek berada disebelah kiri kamera dibandingkan dengan jika benda berada disebelah kanan kamera.
Untuk menemukan penyebabnya secara lebih jelas, dilakukanlah beberapa percobaan baru, terpisah dari percobaan yang sudah dirancang sebelumnya, yaitu mengambil gambar dengan memutarbalikkan minoru 3D webcam (diputar 1800),
mengambil gambar dengan kamera kiri lebih depan dibanding kamera kanan dan sebaliknya kamera kanan yang lebih depan. Objek yang digunakan dalam percobaan ini adalah sebuah majalah. Berikut ini adalah hasil yang diperoleh:
Gambar 4.48 Anaglyph Normal. (a) Objek disebelah kiri kamera (b) Objek disebelah kanan kamera
(a)
88
Gambar 4.49 Anaglyph Putar 1800. (a) Objek disebelah kiri kamera (b) Objek disebelah kanan kamera
(a)
Gambar 4.50 Anaglyph Lensa Kiri Lebih Depan. (a) Objek disebelah kiri kamera (b) Objek disebelah kanan kamera
(a)
90
Gambar 4.51 Anaglyph Lensa Kanan Lebih Depan. (a) Objek disebelah kiri kamera (b) Objek disebelah kanan kamera
Dari ketiga percobaan ini tetap saja disparity yang diperoleh ketika objek berada disebelah kiri kamera sedikit lebih besar dibandingkan dengan ketika objek berada disebelah kanan kamera. Dari ketiga percobaan ini juga terlihat bahwa gambar yang diperoleh tidaklah lurus, untuk mengatasi hal ini maka ketika mengambil data, ditambahkan uang koin Rp 1000,- dibawah salah satu kaki
(a)
minoru 3D webcam, yaitu kaki kiri. Oleh karena itu, percobaan juga dilakukan untuk melihat pengaruh dari perlakuan ini, berikut ini adalah hasilnya:
Gambar 4.52 Anaglyph Dengan Koin. (a) Objek disebelah kiri kamera (b) Objek disebelah kanan kamera
(a)
92
Gambar 4.53 Anaglyph Tanpa Koin. (a) Objek disebelah kiri kamera (b) Objek disebelah kanan kamera
Diperoleh bahwa perlakuan dengan penambahan koin ini tidak memiliki pengaruh terhadap disparity yang dihasilkan ketika objek berada disebelah kiri dan kanan kamera. Nilai disparity yang ada ketika objek berada disebelah kiri kamera tetap sedikit lebih besar dibandingkan dengan ketika objek berada disebelah kanan kamera.
(a)
Percobaan terakhir yang dilakukan untuk masalah ini adalah dengan melakukan overlay terhadap pasangan gambar yang diambil dengan kamera lain. Pasangan gambar ini diperoleh dari internet dengan alamat sebagai berikut:
http://tiporama.com/tools/pixels_inches.html#mondpi Dibawah ini adalah gambar anaglyph yang diperoleh:
94
Dari gambar anaglyph diatas terlihat bahwa objek yang memiliki kedalaman yang sama akan memiliki disparity yang sama sesuai dengan dasar teori yang ada. Dari hasil semua percobaan yang dilakukan, ditarik kesimpulan akhir bahwa penyebab perbedaan nilai disparity yang diperoleh sebagai akibat dari kamera yang digunakan untuk mengambil gambar yaitu minoru 3D webcam. Berangkat dari kesimpulan ini dilakukan pengecekan terhadap nilai distorsi yang dimiliki oleh minoru 3D webcam dari hasil kalibrasi yang telah dilakukan. Didapatkan bahwa nilai distorsi radial dari minoru 3D webcam cukup buruk, dengan nilai koefisien -0,0742 dan -0,4786. Pengaruh dari nilai distorsi ini tidak terlihat secara kasat mata, tapi seperti yang telah diketahui, nilai ini dapat mempengaruhi performa dari sistem.
Grafik berikutnya adalah grafik error dari objek 2 dan 3, kondisi 1-3 adalah posisi 1-3 dari objek 2 dan kondisi 4-6 adalah posisi 1-3 dari objek 3.
96 Terlihat bahwa sistem masih dapat mendeteksi dan mengestimasi posisi objek dengan ukuran yang sedikit berbeda.
Berikutnya adalah grafik untuk menggambarkan pengaruh intensitas cahaya terhadap performa sistem, dengan 6-47 lux sebagai intensitas cahaya 1, 158-245 lux sebagai intensitas cahaya 2 dan 1666-1805 lux sebagai intensitas cahaya 3. Berikut ini adalah grafik yang digunakan:
Dilihat dari ketiga grafik diatas, dapat disimpulkan bahwa intensitas cahaya 3, 1666-1805 lux memiliki tingkat keakurasian tertinggi. Hal ini terjadi karena pada intensitas cahaya ini tepi akibat pertemuan antar papan yang digunakan untuk membentuk lingkungan dapat tereliminasi dengan lebih baik dibandingkan dengan dua intensitas cahaya yang lain.
Berikut ini adalah tabel dan grafik yang menunjukkan waktu proses dari sistem:
Intensitas Cahaya Kondisi Time1 Time2 Time3 Time4 Total
6-47lux 1 0.350 0.069 0.033 0.408 1.192 2 0.368 0.058 0.027 0.089 0.890 3 0.360 0.063 0.026 0.219 1.008 4 0.370 0.072 0.028 0.695 1.488 5 0.398 0.067 0.055 0.486 1.352 6 0.358 0.076 0.030 0.886 1.682 158-245lux 1 0.343 0.069 0.027 0.474 1.243 2 0.354 0.067 0.028 0.299 1.065 3 0.360 0.066 0.029 0.394 1.139 4 0.346 0.073 0.028 0.892 1.705 5 0.343 0.070 0.028 0.855 1.631 6 0.348 0.072 0.028 0.560 1.362 1666-1805lux 1 0.322 0.066 0.026 0.471 1.211 2 0.318 0.062 0.029 0.248 0.984 3 0.348 0.064 0.046 0.262 0.984 4 0.313 0.075 0.028 1.103 1.857 5 0.311 0.069 0.028 0.741 1.491 6 0.333 0.074 0.029 1.149 1.904
98
Gambar 4.58 Processing Time
Waktu dinyatakan dalam satuan detik, dengan: Time1 : Median Filtering
Time2 : ELAS
Time3 : Rekonstruksi 3D Time4 : DBSCAN
Total : Waktu proses secara menyeluruh, mulai dari proses grayscaling hingga diperolehnya estimasi posisi
Terlihat bahwa Time1, Time2, dan Time3 memiliki nilai yang stabil, namun tidak dengan demikian dengan Time4. Hal ini terjadi karena waktu untuk menyelesaikan proses DBSCAN bergantung pada jumlah data yang ada atau dalam skripsi ini adalah jumlah titik 3D hasil rekonstruksi. Semakin banyak titik 3D yang ada, semakin lama pula waktu yang diperlukan untuk menyelesaikan
proses ini. Selain DBSCAN, proses yang membutuhkan waktu lebih lama dibandingkan dengan proses yang lain adalah median filtering (Time1).
Dari data ini dapat diambil kesimpulan bahwa agar sistem dapat berkerja dengan lebih cepat maka perlu diimplementasikan metode filtering dan clustering lain dengan waktu proses yang lebih singkat. Untuk metode clustering akan lebih baik lagi jika waktu proses tidak terlalu bergantung pada jumlah data yang ada, namun tentunya tetap memiliki keunggulan dari DBSCAN, yaitu tidak diperlukannya informasi awal mengenai jumlah kluster yang ada pada data. Keunggulan ini sangat penting, karena hal inilah yang memungkinkan sistem dapat mendeteksi jumlah objek secara otomatis.