i
ROBOT DRAWING DENGAN PERGERAKAN 3 AXIS
TUGAS AKHIR
Oleh :
GUSTI AMASTA
4211401002
PROGRAM STUDI TEKNIK MEKATRONIKA
JURUSAN TEKNIK ELEKTRO
POLITEKNIK NEGERI BATAM
2018
ii
ROBOT
DRAWING
DENGAN PERGERAKAN 3 AXIS
TUGAS AKHIR
Oleh:
GUSTI AMASTA
4211401002
Disusun untuk memenuhi salah satu syarat kelulusan Program Diploma IV Program Studi Teknik Mekatronika
Politeknik Negeri Batam
PROGRAM STUDI TEKNIK MEKATRONIKA
POLITEKNIK NEGERI BATAM
v
Robot
Drawing
Dengan Pergerakan 3 Axis
Nama Mahasiswa : Gusti Amasta NIM : 4211401002
Pembimbing : Hendawan Soebhakti, S.T., M.T. Email : [email protected]
ABSTRAK
Saat ini dunia robotika mulai berkembang pesat dengan munculnya berbagai macam jenis robot. Robot menjadi pilihan untuk membantu pekerjaan manusia mengatasi masalah kepresisian, keamanan, fleksibilitas dan pekerjaan yang berulang-ulang. Dalam bidang seni banyak seniman yang sekarang sudah menggambar menggunakan software yang mana pada
software ini terdapat banyak kemudahan didalamnya. Namun, untuk mencetak gambar kedalam bentuk nyata banyak seniman masih menggunakan printer yang mana printer ini menggunakan tinta untuk mencetak gambar, jadi gambar tidak terlihat seperti digambar oleh manusia secara nyata. Untuk mempermudah pekerjaan seniman dalam menggambar atau melukis, penulis membuat robot untuk mencetak gambar yang ada di software kedalam bentuk hardware dengan menggunakan sebuah pensil. Dengan menggunakan sebuah pensil gambar terlihat lebih nyata seperti dibuat sendiri oleh manusia. Sistem ini menggunakan metode GRBL atau memasukkan perintah yang ada pada mesin cnc kedalam mikrokontroler. Gambar pada software tersebut akan di convert kedalam bentuk gcode kemudian dibaca oleh
software processing yang diserialkan ke arduino untuk pergerakan dalam menggambar. Untuk pergerakannya menggunakan pergerakan 3 axis yang mana terdapat 2 motor stepper
untuk pergerakan pada sumbu x dan y kemudian ada 1 motor servo untuk pergerakan pada sumbu z. Hasil dari pengujian menunjukkan robot bisa menggambar bentuk bangun datar yaitu persegi, persegi panjang, lingkaran, segitiga dan jajargenjang. Robot juga bisa bergerak ke posisi yang telah ditentukan pada software. Kecepatan robot menggambar 5 bangun datar paling lama yaitu selama 2 menit 3 detik.
vi
Robot Drawing With 3 Axis Moves
Student Name : Gusti Amasta NIM : 4211401002
Supervisor : Hendawan Soebhakti, S.T., M.T. Email : [email protected]
ABSTRACT
Currently the world of robotics began to grow rapidly with the appeared various types of robots. Robot is an option to help human work solve problems such as precision, security, flexibility and repetitive work. In the field of art they are many artists who were drawing using software, which are many conveniences in it. However, to print images into real the one, many artists still use printers which uses ink to print images, so the images do not look like drawn by real humans. To overcome these situation, the author makes a robot to print the images that exist in the software by using a pencil. By using the pencil the image looks more real as made by humans. This system uses the GRBL method or enter the commands from the cnc machine into the microcontroller. The image on the software will be converted into gcode and then read by processing software serialized to arduino for movement in drawing. The movement is used 3 axis, such that 2 stepper motors for x, y axis and 1 servo motor for movement on z axis. The results of the test show that the robot can draw flat shape like square, rectangle, circle, triangle and parallelogram. Robot can also move to a specified position in the software. The speed of drawing 5 two-dimentional figures are 2 minutes 3 seconds.
vii
KATA PENGANTAR
Bismillahirohmanirrohim,
Assalamu’alaikum Warahmatullahi Wabarakatuh.
Dengan mengucapkan syukur Alhamdullilah tercurah untuk Allah S.W.T atas segala kemudahan dan kelancaran yang diberikan dalam pengerjaan tugas akhir yang berjudul “Robot Drawing dengan Pergerakan 3 Axis”, serta shalawat beriring salam kepada Rasullullah Nabi Besar Muhammad S.A.W.
Penulis menyadari bahwa banyak pihak yang telah membantu dalam proses pengerjaan tugas akhir ini, oleh karena itu penulis ingin mengucapkan terima kasih kepada pihak yang selalu ada dalam membantu penulis baik secara langsung dan tidak langsung dalam hal dukungan ilmu pengetahuan, waktu, tenaga, semangat, inovasi, dan materi, yaitu kepada :
1. Allah S.W.T yang telah memberikan kemudahan, rahmat, dan kesehatan sehingga penulis dapat menyelesaikan tugas akhir ini tepat pada waktunya.
2. Kepada Kedua Orang tua dan keluarga tercinta yang selalu mendukung, memberikan semangat dan do’a kepada penulis untuk dapat menyelesaikan tugas akhir ini. 3. Bapak Dr. Priyono Eko Sanyoto, Selaku Direktur Politeknik Negeri Batam.
4. Bapak Dr. Budi Sugandi, S.T., M.Eng. Selaku Ka. Jurusan Teknik Elektro Politeknik Negeri Batam serta dosen pengampu mata kuliah Tugas Akhir.
5. Baak Heru Wijanarko, S.T., M.T Selaku Ka. Prodi Teknik Mekatronika Politeknik Negeri Batam.
6. Bapak Hendawan Soebhakti, S.T., M.T. Selaku Dosen Pembimbing yang telah bersedia menyediakan waktu, tenaga, serta pikirannya untuk memberi arahan kepada penulis untuk menyelesaikan tugas akhir.
7. Seluruh dosen dan staff teknik elektro yang telah meluangkan waktu dan memberikan banyak ilmu, dan dukungan selama menempuh pendidikan di Politeknik Negeri Batam.
ix
DAFTAR ISI
PERNYATAAN KEASLIAN TUGAS AKHIR ... iii
LEMBAR PENGESAHAN TUGAS AKHIR ... iv
ABSTRAK... v
DAFTAR ISI ... ix
DAFTAR GAMBAR ... xi
DAFTAR ISI ... xii
BAB I ... 1
PENDAHULUAN ... 1
1.1 Latar Belakang Masalah ... 1
1.2 Perumusan Masalah ... 2
1.3 Batasan Masalah ... 2
1.4 Tujuan dan Manfaat ... 3
1.5 Sistematika dan Penulisan Laporan ... 3
BAB II ... 4 DASAR TEORI ... 4 2.1 GRBL ... 4 2.2 Motor Stepper ... 4 2.3 Motor Servo ... 6 2.4 L293D Shield ... 7
2.5 Tegangan (Stress) dan Regangan (Strain) ... 7
BAB III ... 9
PERANCANGAN SISTEM ... 9
x
3.2 Perancangan Perangkat Keras ... 9
3.2.1 Flowchart Sistem ... 9
3.2.2 Desain Mekanik ... 10
3.3 Perancangan Sistem ... 11
3.4 Skematik Rangkaian ... 12
BAB IV ... 13
HASIL DAN ANALISA ... 13
4.1 Gambar yang digunakan dalam proses pengujian ... 13
4.2 Hasil Percobaan dan Analisa Kecepatan Motor Stepper ... 13
4.3 Hasil Percobaan dan Analisa Posisi pada Motor Stepper ... 15
4.4 Analisis pada mekanik yang digunakan ... 23
4.4.1 Tegangan (Stress) dan Regangan (Strain) Sumbu x ... 23
4.4.2 Tegangan (Stress) dan Regangan (Strain) Sumbu y ... 25
BAB V ... 28
KESIMPULAN DAN SARAN ... 28
5.1 Kesimpulan ... 28
5.2 Saran ... 28
DAFTAR PUSTAKA ... 29
xi
DAFTAR GAMBAR
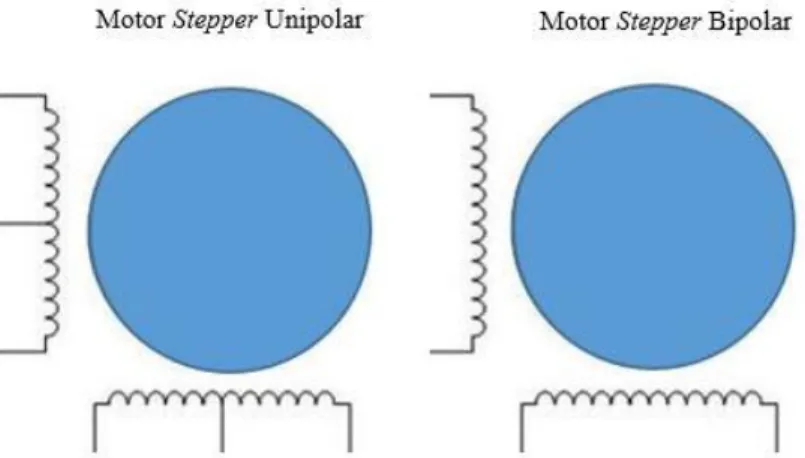
Gambar 2.1 Motor Stepper Unipolar Dan Bipolar ... 4
Gambar 2.2 Motor StepperStep Angle ... 5
Gambar 2.3 Konfigurasi Sistem Motor Stepper ... 5
Gambar 2.4 Pensinyalan Motor Servo ... 6
Gambar 2.5 Driver Motor Shield L293D ... 7
Gambar 3.1 Diagram Blok Hardware Robot Drawing ... 9
Gambar 3.2 Diagram Alir Robot Drawing ... 10
Gambar 3.3 Desain Mekanik ... 10
Gambar 3.4 Desain Mekanik Track x, y, dan z ... 11
Gambar 3.5 Blok Diagram Sistem Kontrol ... 11
Gambar 3.6 Rangkaian Skematik Elektronika ... 12
Gambar 4.1 Bangun Datar yang Digunakan untuk Proses Pengujian ... 13
Gambar 4.2 Nilai Set point dan aktual motor stepper x dan y tabel 4.2 no 1... 15
Gambar 4.3 Nilai Set point dan aktual motor stepper x dan y tabel 4.2 no 2 ... 16
Gambar 4.4 Nilai Set point dan aktual motor stepper x dan y tabel 4.2 no 3... 16
Gambar 4.5 Nilai Set point dan aktual motor stepper x dan y tabel 4.2 no 4... 16
Gambar 4.6 Nilai Set point dan aktual motor stepper x dan y tabel 4.2 no 5... 17
Gambar 4.7 sampel gambar ... 17
Gambar 4.8 Sampel gcode ... 18
Gambar 4.9 Timing belt sumbu x ... 23
Gambar 4.10 Timing belt sumbu y ... 25
xii
DAFTAR TABEL
Tabel 4.1 Hasil percobaan kecepatan motor stepper ... 14
Tabel 4.2 Hasil percobaan posisi pada robot ... 15
Tabel 4.3 Data Servo ... 19
1
BAB I
PENDAHULUAN
1.1Latar Belakang
Saat ini dunia robotika mengalami perkembangan yang sangat pesat dalam berbagai bidang. Berbagai macam riset tentang robotika terus-menerus dikembangkan untuk menyempurnakan fungsi robot dalam membantu pekerjaan manusia. Dalam bidang seni contohnya terdapat robot yang dapat menggambar, berbagai macam jenis robot menggambar bermunculan untuk membantu tugas seniman dalam menyelesaikan pekerjaannya.
Robot yang akan dibahas pada tugas akhir ini adalah robot drawing. Robot drawing
merupakan robot yang dapat menggambar secara otomatis dengan cara mentransfer gambar dari software ke mikrokontroler kemudian robot akan menggambar sampai selesai dengan sendirinya. Robot ini menggunakan motor stepper untuk bergerak menuju posisinya ketika menggambar, dengan memanfaatkan posisi yang cukup akurat dari motor stepper maka robot ini dapat berjalan dengan baik dan diperlukan metode yang baik untuk menentukan motor stepper tersebut supaya robot dapat menuju posisi dengan akurat dan stabil dalam kecepatan yang telah ditentukan.
Sebelumnya, robot drawing telah dikemukakan pada penelitian[1]. Peneliti menggunakan lengan robot sebagai penggerak untuk menggambar dan menggunakan visual basic sebagai tampilan pemberi perintah. Bentuk yang dapat digambar adalah kotak, lingkaran dan segitiga sama sisi yang telah ditentukan sebelumnya pada personal computer.
Untuk menentukan kecepatan dan posisi pada motor stepper dapat dilakukan dengan menggunakan 2 (dua) mode yaitu single-step mode dan slew mode. Pada single mode frekuensi yang diberikan cenderung rendah, pada mode ini setiap step tidak bergantung pada
step lainnya artinya motor dapat berhenti secara pasti. Kekurangan dari mode single-step mode adalah gerakannya lambat dan berombak. Sedangkan untuk slew mode frekuensi yang diberikan tinggi sehingga tidak mempunyai waktu untuk berhenti, motor stepper dengan mode ini tidak dapat berhenti atau berbalik arah secara mendadak, jika di coba lakukan maka motor akan berhenti lebih maju dari step yang ditentukan[2]. Slew mode menggerakan motor lebih cepat tetapi memperbesar motor kehilangan presisi dalam posisi. Untuk menjaga motor
stepper berhenti pada step yang diinginkan maka pada bagian lereng atas (kumparan atas) diberikan frekuensi dengan mode single-step dan pada bagian lereng bawah akhir diberikan frekuensi dengan mode slew yang mengharuskan kontroler mengetahui posisi pada motor
2
Pada penelitian ini, penulis menggunakan sistem yang berbeda, yaitu menggunakan
software inkscape sebagai input, yang mana dapat menggambar bebas sesuai dengan keinginan pengguna. Selanjutnya gambar akan di convert ke bentuk file gcode dan di proses dengan menggunakan sistem GRBL pada processing, Penggunaan GRBL pada penelitian ini memiliki tujuan untuk pengontrolan posisi pada motor yang lebih akurat. GRBL memberikan input posisi ke arduino, sehingga dapat mengkoordinasi pada ketiga motor untuk mengubah input posisi tadi menjadi pwm sebagai input driver motor, kemudian driver
motor akan mengontrol ketiga motor yaitu 2 (dua) motor stepper untuk posisi x, y, dan 1 (satu) motor servo untuk posisi z pada robot drawing.
1.2Rumusan Masalah
Berdasarkan latar belakang maka penulis merumuskan permasalahan pada tugas akhir ini sebagai berikut :
1. Apakah sistem kontrol kecepatan dan posisi motor sudah bagus? 2. Bagaimana koordinasi gerak antar motor?
3. Apakah desain mekanik dapat membuat pergerakan lebih akurat?
1.3Batasan Masalah
Agar perancangan yang dibahasa dalam Tugas Akhir ini tidak terlalu luas dan menyimpang, maka penulis membatas permasalahan sebagai berikut :
1. Software menggambar yang dipakai adalah inkscape.
2. Area kerja untuk menggambar memiliki lebar = 21 cm dan panjang = 29,7 cm. 3. Dalam menggambar hanya memakai 1 warna saja yaitu hitam.
4. Alat ini hanya menggambar garis luar dari objek.
5. Jenis kertas yang digunakan adalah kertas hvs dengan ketebalan 80 - 200 gsm. 6. Ketinggian pensil dalam menggambar diatur pada software inkscape.
7. Ketebalan dalam menggambar disesuaikan dengan ketinggian pensil dan jenis pensil yang digunakan.
3
1.4Tujuan dan Manfaat
Berdasarkan latar belakang maka penulis memiliki tujuan pada tugas akhir ini sebagai berikut :
1. Mampu mengontrol kecepatan dan posisi motor.
2. Mampu mengkoordinasi ketiga motor untuk membuat suatu gambar. 3. Mampu mendesain mekanik untuk pergerakan yang lebih akurat.
Adapun manfaat dari pembuatan tugas akhir ini sebagai berikut :
1. Sebagai wadah untuk mengekpresikan gambar yang berbentuk softcopy ke bentuk
hardcopy seperti di gambar secara manual.
2. Sebagai salah satu syarat untuk lulus dalam program studi diploma IV. 3. Sebagai metode pembelajaran.
1.5 Sistematika Penulis Laporan
Proposal proyek akhir 2 ini terdiri dari lima bab dengan sistematika penulisan sebagai berikut :
Bab 1 : Pendahuluan
Bab ini meliputi latar belakang, rumusan masalah, batasan masalah, tujuan dan manfaat dan sistematika penulisan.
Bab 2 : Dasar Teori
Bab ini berisi teori-teori yang mendukung perancangan alat pendeteksi nominal uang kertas bagi penyandang tunanetra.
Bab 3 : Perancangan Sistem
Bab ini menjelaskan tentang perencanaan sistem baik perangkat keras maupun perangkat lunak. Bab ini juga menjelaskan tentang komponen-komponen yang digunakan untuk menyusun sistem utama.
Bab 4 : Hasil dan Analisa
Bab ini menjelaskam tentang hasil pengujian yang dilakukan dalam penelitian serta analisa dan pembahasan dari hasil pengujian yang telah dilakukan.
Bab 5 : Kesimpulan dan Saran
Bab ini berisi kesimpulan dari hasil pengukuran, pengujian, serta analisa dan pembahasan yang telah ditulis pada bab sebelumnya. Bab ini juga menuliskan saran untuk perbaikan sistem yang sudah dibuat di Tugas Akhir.
4
BAB II
DASAR TEORI
2.1GRBL
GRBL adalah penerjemah gcode yang mampu berjalan pada mikrokontroler kecil seperti kontroler yang digunakan pada arduino board. GRBL sendiri memiliki perintah – perintah yang ada seperti pada mesin CNC. Pada tugas akhir ini software processing
dihubungkan secara serial dengan arduino untuk menjalankan beberapa perintah pada GRBL seperti posisi x, y, z axis, titik nol axis, dan streaming gcode file[3].
GRBL biasanya digunakan dalam beberapa aplikasi misalnya seperti cutting laser, 3D printing, serta printer. GRBL ini sudah ada dalam bentuk modul dan dapat digunakan pada sistem yang mengandalkan pergerakan posisi. Pada tugas akhir ini GRBL digunakan untuk mengontrol ke tiga motor yaitu 2 motor stepper dan 1 motor servo dengan menggunakan arduino, ketiga motor ini nantinya akan dikoordinasikan sehingga dapat membentuk suatu gambar[3].
2.2Motor Stepper
Motor stepper adalah sebuah motor yang digunakan untuk mencapai posisi yang tepat melalui kontrol digital. Motor stepper ini beroperasi dengan sinkronisasi output sinyal pulsa dari kontroler pengemudi sehingga posisinya lebih akurat. Motor stepper juga memiliki kemampuan untuk menghasilkan torsi yang tinggi pada kecepatan yang rendah dan meminimalkan getaran, sehingga sangat ideal untuk pengaplikasian yang memerlukan posisi cepat dengan jarak yang pendek. Pada Gambar 2.1 terlihat ada 2 jenis motor stepper yaitu motor stepper unipolar dan motor stepper bipolar. Motor stepper unipolar menggunakan center tap sehingga terdapat 6 kabel yang ada pada motor stepper jenis ini, motor stepper
unipolar ini biasanya memiliki torsi yang lebih tinggi daripada motor stepper bipolar[2].
5
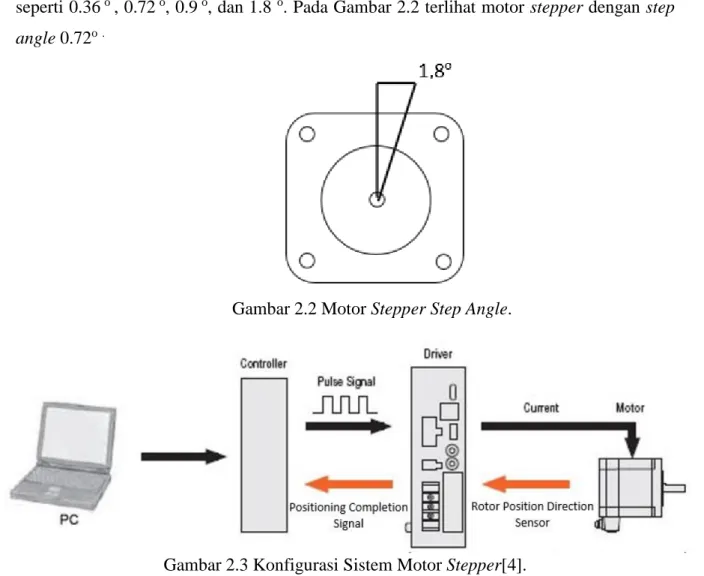
Motor stepper berputar dengan step angle yang tetap disetiap sudutnya yang dinamakan dengan step angle.step angle ini berbeda – beda di setiap jenis motor stepper
seperti 0.36 o , 0.72 o, 0.9 o, dan 1.8 o. Pada Gambar 2.2 terlihat motor stepper dengan step angle 0.72o.
Gambar 2.2 Motor StepperStep Angle.
Gambar 2.3 Konfigurasi Sistem Motor Stepper[4].
Untuk menentukan banyaknya step dalam satu putaran penuh dapat menggunakan persamaan (1) dibawah ini :
𝑠𝑡𝑒𝑝 =
360 𝑑𝑒𝑟𝑎𝑗𝑎𝑡𝑠𝑡𝑒𝑝 𝑎𝑛𝑔𝑙𝑒 (1)
Pada persamaan (1) penulis menggunakannya pada robot drawing untuk mengatur banyaknya step dalam satu putaran penuh pada motor stepper. Pada pergerakan motor
stepper penulis tentukan step angle sebesar 1,8o. Penentuan step angle ini bertujuan untuk mendapatkan 200 step dalam satu putaran penuh motor stepper.
Pada Gambar 2.3 terlihat masukan awal dari PC lalu masuk ke controller kemudian
controller mengeluarkan sinyal pulsa yang berfungsi untuk mengatur motor pada driver
6
Pada tugas akhir ini untuk mengatur kecepatan dari motor stepper, penulis memanfaatkan pulsa yang masuk ke setiap lilitan yang ada pada motor stepper kemudian mengatur delay pada pulsa tersebut untuk mengatur lamanya proses menggambar pada robot
drawing ini. pada motor stepper penulis ubah kecepatannya kedalam bentuk rpm menggunakan persamaan dibawah ini[4] :
𝜔 =
𝑁𝑝60𝑝𝑝𝑠
(2) dengan : 𝜔 = 𝑅𝑜𝑡𝑎𝑠𝑖/𝑚𝑒𝑛𝑖𝑡 atau rpm 𝑁𝑝 = 𝑆𝑡𝑒𝑝/𝑝𝑢𝑡𝑎𝑟𝑎𝑛(𝑝𝑢𝑙𝑠𝑎/𝑟𝑜𝑡𝑎𝑠𝑖) 𝑝𝑝𝑠 = 𝑝𝑢𝑙𝑠𝑎 𝑝𝑒𝑟 𝑑𝑒𝑡𝑖𝑘 2.3Motor ServoMotor servo adalah motor yang menggunakan sistem close loop, yang mana sistem ini nantinya akan mengeluarkan feedback lagi ke input. Ada 2 jenis motor servo yaitu dengan perputaran sudut 180 o dan sudut 360 o. Cara kerja motor servo ini sendiri ketika diberi masukan yang berupa pulsa ke motor, motor akan berputar sesuai masukan dan akan mengirim sinyal lagi ke input untuk memberitahu bahwa keadaan motor sedang dalam posisi derajat yang telah di tentukan sebelumnya.
7
Untuk menggerakkan motor servo ke kanan atau ke kiri, tergantung dari nilai delay yang kita berikan. Untuk membuat servo pada posisi center, berikan pulsa 1.5 ms. Untuk memutar servo ke kanan, berikan pulsa <= 1.3 ms, dan pulsa >= 1.7 ms untuk berputar ke kiri dengan delay 20 ms.
2.4L293D Shield
Gambar 2.5 Driver Motor Shield L293D[6].
L293D adalah sebuah modul yang didesain untuk dihubungkan dengan Arduino uno maupun arduino mega. Pada Gambar 2.3 terlihat driver motor l293d yang dapat mengontrol 4 motor dc, 2 motor stepper dan 2 motor servo. Dalam 1 unit chip ic l293d terdiri dari 4 buah
driver motor dc yang berdiri sendiri sendiri dengan kemampuan mengalirkan arus 1 Ampere tiap driver. Sehingga dapat digunakan untuk membuat driver h-bridge pada 2 buah motor dc[6].
Tugas akhir ini penulis memanfaatkan driver motor shield L293D untuk mengontrol 2 motor stepper dan 1 motor servo yang mana untuk motor stepper penulis menggunakan motor stepper bipolar dengan 4 wire.
2.5 Tegangan (stress) dan Regangan (Strain)
Pada penelitian ini penulis menggunakan beberapa mekanik yang dapat mengalami perubahan bentuk, hal ini diakibatkan oleh tegangan dan regangan. Tegangan dan regangan memiliki perbedaan. Tegangan adalah Suatu benda elastis akan bertambah panjang sampai ukuran tertentu ketika ditarik oleh sebuah gaya. Besarnya tegangan pada sebuah benda adalah perbandingan antara gaya tarik yang berkerja benda terhadap luas penampang benda tersebut. Tegangan menunjukkan kekuatan gaya yang menyebabkan benda berubah bentuk[9].
8
Persamaan (3) menunjukkan cara untuk mencari tegangan dari suatu benda
𝜎 =
𝐹𝐴(3)
dengan :
𝜎 = 𝑇𝑒𝑔𝑎𝑛𝑔𝑎𝑛 (𝑆𝑡𝑟𝑒𝑠𝑠)
𝐹 = 𝐺𝑎𝑦𝑎 𝑦𝑎𝑛𝑔 𝑑𝑖 𝑏𝑒𝑏𝑎𝑛𝑘𝑎𝑛 𝑝𝑎𝑑𝑎 𝑚𝑜𝑡𝑜𝑟 (𝑁) 𝐴 = 𝐿𝑢𝑎𝑠 𝑃𝑒𝑛𝑎𝑚𝑝𝑎𝑛𝑔 (𝑚2)
Kemudian Regangan merupakan perubahan relatif ukuran atau bentuk suatu benda yang mengalami tegangan. Regangan dapat didefinisikan sebagai pebandingan antara pertambahan panjang benda terhadap panjang benda mula-mula. Selain itu regangan menjadi tolok ukur seberapa jauh benda tersebut berubah bentuk[5].
Persamaan (4) menunjukkan cara untuk mencari regangan dari suatu benda
𝜀 =
∆𝑥𝑥 (4)dengan :
𝜀 = 𝑟𝑒𝑛𝑔𝑔𝑎𝑛𝑔𝑎𝑛
𝑥 = 𝑝𝑎𝑛𝑗𝑎𝑛𝑔 𝑚𝑢𝑙𝑎 − 𝑚𝑢𝑙𝑎 ∆𝑥 = 𝑝𝑒𝑟𝑡𝑎𝑚𝑏𝑎ℎ𝑎𝑛 𝑝𝑎𝑛𝑗𝑎𝑛𝑔
Jadi antara tegangan dan regangan terdapat hubungan yang saling berkaitan antara keduanya pada mekanik tugas akhir ini. Tegangan adalah yang menyebabkan benda mengalami perubahan bentuk sementara regangan adalah banyaknya pertambahan yang terjadi dari bentuk semula ke bantuk yang mengalami perubahan.
9
BAB III
PERANCANGAN SISTEM
3.1Rancangan Penelitian
Penelitian ini akan dilakukan desain eksperimental untuk pengujian sistem pengontrolan posisi motor pada robot drawing dengan tahapan penelitian sebagai berikut :
1. Pembuatan desain alat. 2. Pembuatan Prototipe 3. Re-desain Alat 4. Pembuatan Mekanik 5. Pembuatan Elektrikal 6. Pembuatan Program 7. Pengujian Alat
3.2 Perancangan Perangkat Keras
Pada peneilitian ini akan di buat Robot drawing dengan diagram blok seperti dibawah ini :
Gambar 3.1 Diagram Blok Hardware Robot Drawing.
Seperti yang terlihat pada blok diagram pada Gambar 3.1, pc digunakan sebagai masukan yang mengirim data desain yang telah di convert menjadi g-code file berupa posisi x, y dan z ke mikrokontroler. Pada mikrokontroler nilai – nilai x, y dan z digunakan untuk menghasilkan sinyal pulsa yang akan digunakan sebagai masukan bagi driver mengeluarkan tegangan untuk motor supaya motor bergerak sesuai dengan posisi tujuan.
3.2.1 Flowchart Sistem
Robot drawing ini berkerja dimulai dari membuat gambar pada software inkscape
dan di masukkan file g-code sebagai input dari software processing, yang mana software ini bekerja sebagai pembaca nilai posisi pada file g-code. Ketika file gcode belum di upload maka robot dalam posisi awal dan ketika file gcode sudah di upload ke dalam kontroler maka
10
robot akan mulai menggambar dan ketika selesai menggambar maka robot akan kembali lagi ke posisi awal seperti yang terlihat pada Gambar 3.2.
Gambar 3.2 Diagram Alir Robot Drawing.
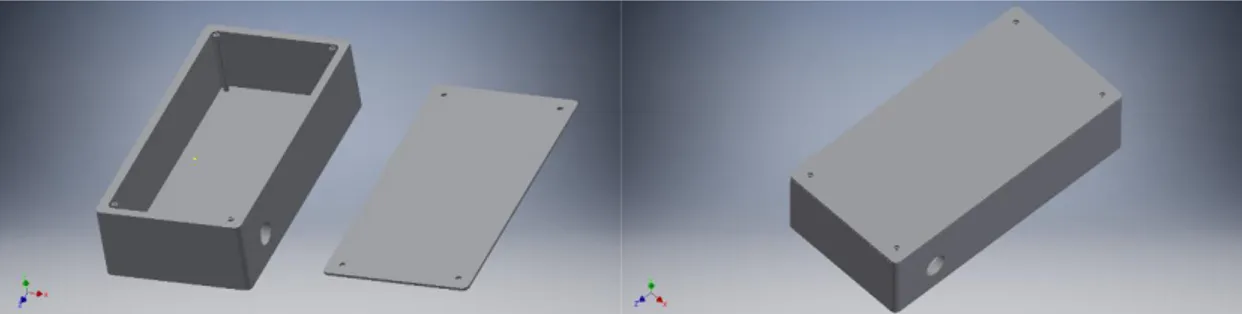
3.2.2 Desain Mekanik
Gambar 3.3 Desain mekanik, menggambarkan penempatan untuk komponen seperti mikrokontroler arduino mega, driver motor Arduino shield L293D serta wiring kabel
11
Sedangkan Gambar 3.4 merupakan desain mekanik untuk pergerakan x axis, pergerakany axis, dan pergerakan z axis. Di desain mekanik pada gambar 3.4 terdapat juga motor stepper, motor servo, pulley serta kabel belting.
Gambar 3.4 Desain Mekanik Track x, y, dan z.
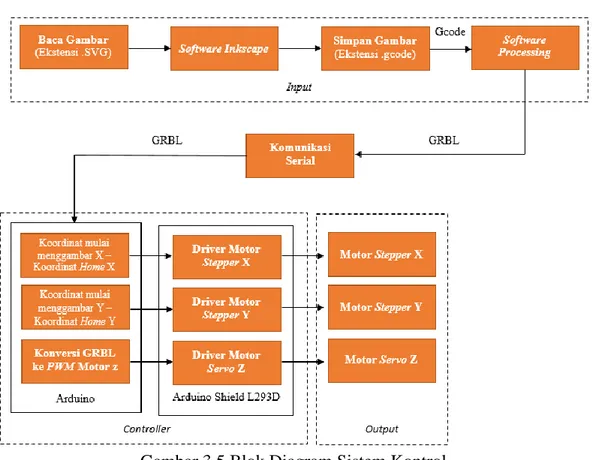
3.3Perancangan Sistem
Dengan menggunakan sistem kontrol GRBL untuk mengatur posisi motor dengan masukan berupa gambar yang sudah di export menjadi file g-code dan keluaran berupa pwm untuk mengatur posisi motor maka didapat desain sistem seperti Gambar 3.5.
12
Pada penelitian ini gambar yang telah di desain pada software inkscape di export ke dalam bentuk file g-code yang mana pada file g-code ini terdapat nilai – nilai x, y dan z sebagai input ke processing. File g-code ini akan di proses di dalam software processing
yang mana pada processing ini akan dilakukan proses menggunakan GRBL yang nantinya akan menjadi masukan di arduino sebagai pengontrolnya.
Pada pengontrolan cnc GRBL sendiri hanya digunakan beberapa fitur yang ada pada cnc yaitu x, y, z axis, titik nol axis, dan streaming file g-code, semua fitur ini akan dilakukan pada processing, untuk pengontrolan motor akan dilakukan pada Arduino dan menggunakan
driver L293D.
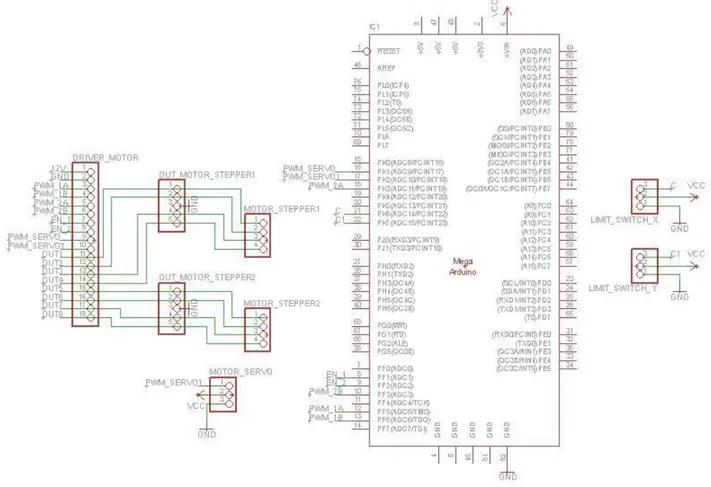
3.4 Skematik Rangkaian
Pada Gambar 3.6 skematik rangkaian, dimana pin komponen satu dengan komponen lainya terhubung untuk membentuk sistem yang diinginkan. dalam skematik rangkaian ini terdapat 1 Arduino Mega 2560, 1 Driver motor shield L293D, 2 limit switch, dan 2 motor
stepper.
13
BAB IV
HASIL DAN ANALISA
Hasil dan Analisa merupakan data yang harus diketahui dalam pembuatan suatu alat. Tujuan dari pengambilan data antara lain untuk memonitoring dan memantau apakah alat yang dibuat tersebut sudah sesuai dengan yang diharapkan peneliti. Berikut data hasil pengujian dan analisa yang dilakukan dalam pengerjaan Tugas Akhir ini, yang meliputi :
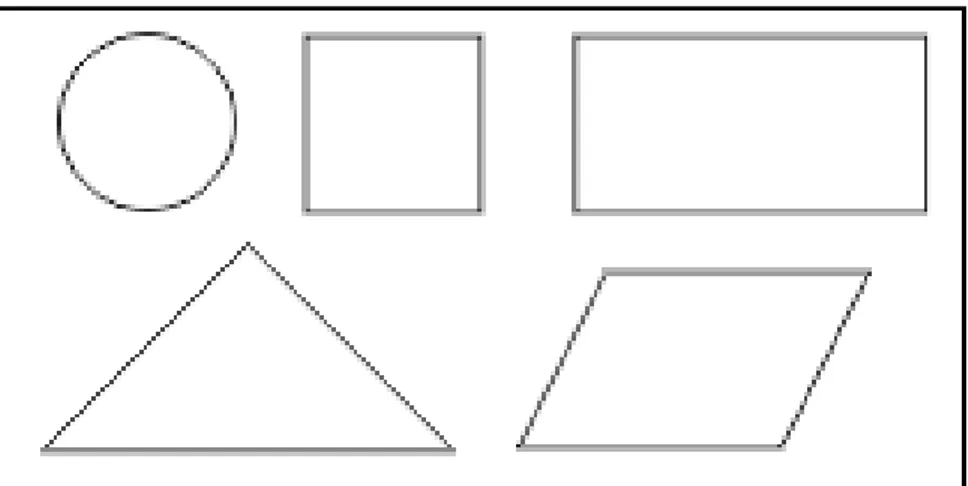
4.1 Gambar yang Digunakan Dalam Proses Percobaan
Jumlah gambar yang digunakan dalam proses pengambilan data ini adalah sejumlah 125 gambar, dimana gambar tersebut di ambil sesuai dengan skala dan posisi yang berbeda-beda. Terdapat 5 jenis bangun datar yang digunakan untuk pengambilan data ini, bangun datar tersebut dapat di lihat pada gambar 4.1.
Gambar 4.1 Bangun Datar yang Digunakan untuk Proses Pengujian.
Gambar yang tertera pada Gambar 4.1 akan di gambar oleh software inkscape
kemudian akan di uji pada robot drawing dengan beberapa kali percobaan pada skala dan posisi yang berbeda-beda sehingga nantinya dapat dilihat apakah robot telah presisi dalam menggambar.
4.2 Hasil Percobaan dan Analisa Kecepatan Motor Stepper
Pada percobaan kali ini akan dilakukan percobaan robot menggambar bangun datar sesuai dengan kecepatannya yaitu dari kecepatan minimal sampai dengan kecepatan maksimal. Tujuan dari percobaan ini sendiri adalah untuk menentukan kecepatan robot dalam menggambar dan melihat hasilnya apakah ada perbedaan dalam menggambar sesuai dengan kecepatan motornya. Dalam pergerakan motor stepper penulis menetapkan untuk 1
step motor stepper adalah sebesar 1,8o jika ingin mencapai 1 putaran penuh berarti motor
14
kecepatan pada motor stepper dalam satuan rpm penulis menggunakan perumusan seperti pada persamaan (2).
𝜔 =
𝑁𝑝60𝑝𝑝𝑠
(2) dengan : 𝜔 = 𝑅𝑜𝑡𝑎𝑠𝑖/𝑚𝑒𝑛𝑖𝑡 atau rpm 𝑁𝑝 = 𝑆𝑡𝑒𝑝/𝑝𝑢𝑡𝑎𝑟𝑎𝑛(𝑝𝑢𝑙𝑠𝑎/𝑟𝑜𝑡𝑎𝑠𝑖) 𝑝𝑝𝑠 = 𝑝𝑢𝑙𝑠𝑎 𝑝𝑒𝑟 𝑑𝑒𝑡𝑖𝑘Dalam menetapkan kecepatan motor ini hanya menetapkan kecepatan dari motor
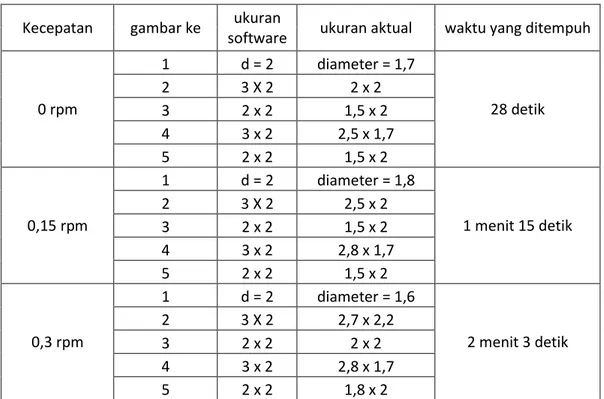
stepper x dan y.hasil dari percobaan akan di tampilkan pada tabel 4.1 Tabel 4.1 Hasil percobaan kecepatan motor stepper.
Kecepatan gambar ke ukuran
software ukuran aktual waktu yang ditempuh
0 rpm 1 d = 2 diameter = 1,7 28 detik 2 3 X 2 2 x 2 3 2 x 2 1,5 x 2 4 3 x 2 2,5 x 1,7 5 2 x 2 1,5 x 2 0,15 rpm 1 d = 2 diameter = 1,8 1 menit 15 detik 2 3 X 2 2,5 x 2 3 2 x 2 1,5 x 2 4 3 x 2 2,8 x 1,7 5 2 x 2 1,5 x 2 0,3 rpm 1 d = 2 diameter = 1,6 2 menit 3 detik 2 3 X 2 2,7 x 2,2 3 2 x 2 2 x 2 4 3 x 2 2,8 x 1,7 5 2 x 2 1,8 x 2
Pada motor stepper, rotor berputar karena pulsa yang bergantian masuk kedalam setiap lilitan yang ada di motor stepper. Kecepatan perputaran rotor ditentukan oleh kecepatan perpindahan pulsa. Pada program arduino terdapat pengaturan kecepatan atau lamanya proses dalam menggambar. Pada table 4.1 adalah percobaan menentukan kecepatan motor pada saat robot mulai menggambar. Pada percobaan tersebut nilai 0 adalah nilai kecepatan maksimal yang diberikan kemudian penulis mengubahnya ke dalam satuan rpm menggunakan rumus pada persamaan (2). Terlihat pada tabel 4.1 pada saat keepatan diberi nilai 0 atau 0 rpm kecepatan menggambar selama 28 detik dengan perhitungan pada dimensi gambar secara manual seperti pada tabel. Selanjutnya pada kecepatan 0.5 ms atau 0.15 rpm
15
kecepatan robot dalam menggambar gambar yang sama adalah sebesar 1 menit 15 detik dengan hasil gambar yang diukur secara manual pada dimensi gambar seperti pada tabel 4.1. kemudian pada saat kecepatan diberi nilai 1 ms atau 0.3 rpm kecepatan menggambar robot 2 menit 3 detik dengan hasil gambar yang di ukur secara manual pada dimensi gambar seperti pada tabel 4.1.
4.2 Hasil Percobaan dan Analisa Posisi pada Motor Stepper
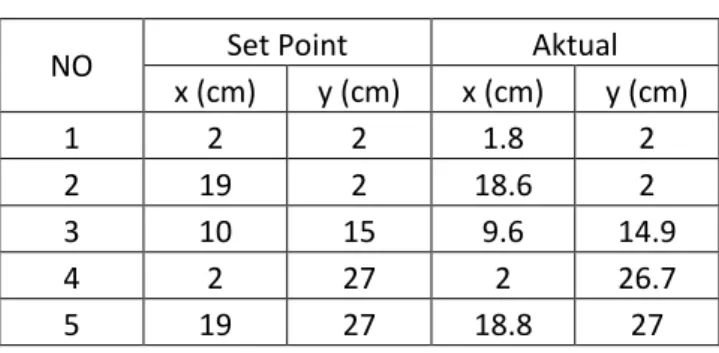
Pada percoban ini robot menuju posisi yang telah di tentukan dan mengukur secara manual kemudian melihat grafik yang di tampilkan untuk melihat nilai set point dan aktual pada motor stepper. Tabel 4.2 adalah percoban posisi yang diberikan pada robot dan robot akan bergerak sesuai dengan posisi yang telah di tentukan. Dari tabel 4.2 terlihat bahwa robot bergerak pada posisi yang telah di tentukan (set point) dan nilai yang dituju oleh robot (aktual). Nilai pada tabel 4.2 akan dibandingkan dengan nilai yang di munculkan pada grafik untuk melihat perbandingan nilai posisi yang di gambar oleh robot dan yang di tampilkan pada grafik (software).
Tabel 4.2 Hasil percobaan posisi pada robot.
NO Set Point Aktual
x (cm) y (cm) x (cm) y (cm) 1 2 2 1.8 2 2 19 2 18.6 2 3 10 15 9.6 14.9 4 2 27 2 26.7 5 19 27 18.8 27
Berikut adalah grafik nilai set point dan aktual pada saat motor bergerak menuju posisi yang telah di tentukan.
a. grafik tabel 4.2 no 1
16
b. grafik tabel 4.2 no 2
Gambar 4.3 Nilai Set point dan aktual motor stepper x dan y tabel 4.2 no 2. c. grafik tabel 4.2 no 3
Gambar 4.4 Nilai Set point dan aktual motor stepper x dan y tabel 4.2 no 3. d. grafik tabel 4.2 no 4
17
e. grafik tabel 4.2 no 5
Gambar 4.6 Nilai Set point dan aktual motor stepper x dan y tabel 4.2 no 5.
Jadi dari grafik diatas dapat dilihat bahwa jumlah step set point dan aktual dapat berbanding lurus pada saat robot mencapai tujuan yang telah di tentukan. Pada program arduino penulis mengatur nilai step/mm kemudian dikalikan dengan nilai ukuran pada gcode yang berupa mm maka di dapat step/cm seperti pada grafik. Pada grafik nilai aktual dapat mencapai nilai pada set point tetapi pada saat robot menuju posisi, posisi yang di tuju tidak sepresisi posisi pada grafik. Perputaran pada motor telah sesuai dengan step yang dihasilkan pada arduino hanya saja untuk pergerakan pada robot belum sepenuhnya presisi karena ada kerenggangan pada belting.
4.3 Hasil percobaan dan analisa koordinasi motor untuk membentuk suatu gambar
Pada percobaan ini penulis mencoba mengkoordinasikan ketiga motor yang ada pada robot yaitu 2 motor stepper untuk sumbu X dan Y, dan motor servo untuk sumbu Z. koordinasi ketiga motor ini tujuannya adalah untuk membentuk suatu gambar kemudian hasilnya akan dibandingkan dengan gambar yang ada pada software. Hal pertama yang dilakukan adalah membuat gambar pada software inkscape lalu mentransfernya kedalam bentuk gcode. Berikut adalah sampel gambar dan sampel gcode yang dihasilkan pada
software inkscape dari gambar lingkaran
18
Gambar 4.8 Sampel gcode.
Pada gambar 4.3 dapat di lihat sampel gcode yang terdapat nilai dari X,Y dan Z. nilai pada gcode ini berupa ukuran mm (millimeter), jadi dalam program arduino harus mengatur terlebih dahulu nilai step dalam ukuran mm (millimeter) untuk motor pada sumbu X dan Y.
float StepsPerMillimeterX = 140; //ubah step ke milimeter x
float StepsPerMillimeterY = 200; //ubah step ke milimeter y
nilai step diatas di ambil dari data maksimal kertas A4 untuk sumbu X dan Y. jadi untuk mencapai 1 mm pada motor X adalah sebesar 140 step dan untuk motor y adalah 200 step. lalu step diatas dikalikan dengan nilai gcode yang telah di parsing dalam arduino untuk mendapatkan nilai yang sesuai dengan sumbu X dan Y pada kertas.
x1 = (int)(x1*StepsPerMillimeterX);
y1 = (int)(y1*StepsPerMillimeterY);
dalam program arduino telah terdapat program untuk mengkoordinasi ketiga motor ini, untuk motor pada sumbu Z hanya mengambil inisiaisasi dari gcode. Dalam program arduino untuk nilai servo naik dalah 118o dan untuk turun 83o.
19
Tabel 4.3 Data Servo.
nilai pada gcode keterangan Derajat Servo -30 Turun 83o 600 Naik 118o
pada tabel 4.3 adalah nilai pada sumbu Z. nilai -30 untuk turun dan 600 untuk naik adalah nilai yang penulis tetapkan pada software inkscape yang kemudian akan dibaca pada
software processing dan diserialkan ke arduino.
Sedangkan pada sumbu X dan Y motor saling berhubungan untuk bergerak dan mengikuti garis yang telah diubah kedalam bentuk gcode. Pada gcode terdapat fungsi G0, G0 ini berfungsi untuk menyimpan posisi sebelumnnya sebelum masuk posisi yang baru. Dalam program arduino penulis menamakan Xpos, Ypos dan Zpos ini adalah posisi motor saat ini, dan pada saat masuk posisi baru maka posisi baru dikurangkan dengan posisi saat ini maka nantinya akan dapat posisi selanjutnya yang akan dituju oleh motor X dan Y.
Berikut adalah hasil percobaan dari koordinasi ketiga motor dengan menggambar kelima bangun datar lalu membandingkannya dengan ukuran gambar yang dibuat pada
software
Tabel 4.4 Hasil percobaan.
Bentuk
Gambar Percobaan ke -
Gambar ke
- Ukuran Software
Ukuran yang diameteri gambar
Lingkaran
Percobaan 1 Gambar 1 diameter = 1 cm diameter = 1 cm Percobaan 2 Gambar 2 diameter = 1 cm diameter = 1 cm Percobaan 3 Gambar 3 diameter = 1 cm diameter = 1 cm Percobaan 4 Gambar 4 diameter = 1 cm diameter = 1 cm Percobaan 5 Gambar 5 diameter = 1 cm diameter = 1 cm Percobaan 6 Gambar 6 diameter = 1 cm diameter = 1 cm Percobaan 7 Gambar 7 diameter = 1 cm diameter = 1 cm Percobaan 8 Gambar 8 diameter = 1 cm diameter = 1 cm Percobaan 9 Gambar 9 diameter = 1 cm diameter = 1 cm
Percobaan 10 Gambar 1 diameter = 2 cm diameter = 2 cm Percobaan 11 Gambar 2 diameter = 2 cm diameter = 1.8 cm Percobaan 12 Gambar 3 diameter = 2 cm diameter = 1.7 cm Percobaan 13 Gambar 4 diameter = 2 cm diameter = 1.5 cm Percobaan 14 Gambar 5 diameter = 2 cm diameter = 1.8 cm Percobaan 15 Gambar 6 diameter = 2 cm diameter = 2 cm Percobaan 16 Gambar 7 diameter = 2 cm diameter = 1.9 cm Percobaan 17 Gambar 8 diameter = 2 cm diameter = 2 cm
20 Percobaan 18 Gambar 9 diameter = 2 cm diameter = 2 cm
Percobaan 19 Gambar 1 diameter = 3 cm diameter = 2.5 cm Percobaan 20 Gambar 2 diameter = 3 cm diameter = 2.7 cm Percobaan 21 Gambar 3 diameter = 3 cm diameter = 3 cm Percobaan 22 Gambar 4 diameter = 3 cm diameter = 2.5 cm Percobaan 23 Gambar 5 diameter = 3 cm diameter = 3 cm Percobaan 24 Gambar 6 diameter = 3 cm diameter = 2.8 cm Percobaan 25 Gambar 7 diameter = 3 cm diameter = 3 cm Percobaan 26 Gambar 8 diameter = 3 cm diameter = 3 cm Percobaan 27 Gambar 9 diameter = 3 cm diameter = 3 cm
Percobaan 28 Gambar 1 diameter = 4 cm diameter = 3.5 cm Percobaan 29 Gambar 2 diameter = 4 cm diameter = 4 cm Percobaan 30 Gambar 3 diameter = 4 cm diameter = 3.6 cm Percobaan 31 Gambar 4 diameter = 4 cm diameter = 4 cm Percobaan 32 Gambar 5 diameter = 4 cm diameter = 4 cm Percobaan 33 Gambar 6 diameter = 4 cm diameter = 3.7 cm Percobaan 34 Gambar 7 diameter = 4 cm diameter = 4 cm Percobaan 35 Gambar 8 diameter = 4 cm diameter = 3.8 cm Percobaan 36 Gambar 9 diameter = 4 cm diameter = 4 cm
Percobaan 37 Gambar 1 diameter = 5 cm diameter = 5 cm Percobaan 38 Gambar 2 diameter = 5 cm diameter = 4.8 cm Percobaan 39 Gambar 3 diameter = 5 cm diameter = 5 cm Percobaan 40 Gambar 4 diameter = 5 cm diameter = 4.8 cm Percobaan 41 Gambar 5 diameter = 5 cm diameter = 5 cm Percobaan 42 Gambar 6 diameter = 5 cm diameter = 4.6 cm Percobaan 43 Gambar 7 diameter = 5 cm diameter = 4.5 cm Percobaan 44 Gambar 8 diameter = 5 cm diameter = 5 cm Percobaan 45 Gambar 9 diameter = 5 cm diameter = 4.8 cm
Persegi Percobaan 46 Gambar 1 2 x 2 cm 2 x 2 cm Percobaan 47 Gambar 2 2 x 2 cm 2 x 2 cm Percobaan 48 Gambar 3 2 x 2 cm 2 x 2 cm Percobaan 49 Gambar 4 2 x 2 cm 2 x 2 cm Percobaan 50 Gambar 5 2 x 2 cm 2 x 2 cm Percobaan 51 Gambar 1 3 x 3 cm 2.5 x 2.6 cm Percobaan 52 Gambar 2 3 x 3 cm 2.8 x 2.8 cm Percobaan 53 Gambar 3 3 x 3 cm 2.7 x 2.6 cm Percobaan 54 Gambar 4 3 x 3 cm 3 x 3 cm Percobaan 55 Gambar 5 3 x 3 cm 2.5 x 2.8 cm
21 Percobaan 56 Gambar 1 4 x 4 cm 3.5 x 3.5 cm Percobaan 57 Gambar 2 4 x 4 cm 3.6 x 3.6 cm Percobaan 58 Gambar 3 4 x 4 cm 3.6 x 3.6 cm Percobaan 59 Gambar 4 4 x 4 cm 3.6 x 3.6 cm Percobaan 60 Gambar 5 4 x 4 cm 3.6 x 3.6 cm Percobaan 61 Gambar 1 5 x 5 cm 4.5 x 4.5 cm Percobaan 62 Gambar 2 5 x 5 cm 4.5 x 4.5 cm Percobaan 63 Gambar 3 5 x 5 cm 4.5 x 4.5 cm Percobaan 64 Gambar 4 5 x 5 cm 4.5 x 4.5 cm Percobaan 65 Gambar 5 5 x 5 cm 4.5 x 4.5 cm Segitiga Percobaan 66 Gambar 1 2 x 2 cm 2 x 2 cm Percobaan 67 Gambar 2 2 x 2 cm 2 x 2 cm Percobaan 68 Gambar 3 2 x 2 cm 2 x 2 cm Percobaan 69 Gambar 4 2 x 2 cm 2 x 2 cm Percobaan 70 Gambar 5 2 x 2 cm 2 x 2 cm Percobaan 71 Gambar 1 3 x 3 cm 3 x 3 cm Percobaan 72 Gambar 2 3 x 3 cm 3 x 3 cm Percobaan 73 Gambar 3 3 x 3 cm 3 x 3 cm Percobaan 74 Gambar 4 3 x 3 cm 3 x 3 cm Percobaan 75 Gambar 5 3 x 3 cm 3 x 3 cm Percobaan 76 Gambar 1 4 x 4 cm 3.8 x 3.8 cm Percobaan 77 Gambar 2 4 x 4 cm 3.6 x 3.6 cm Percobaan 78 Gambar 3 4 x 4 cm 3.5 x 3.6 cm Percobaan 79 Gambar 4 4 x 4 cm 4 x 4 cm Percobaan 80 Gambar 5 4 x 4 cm 4 x 4 cm Percobaan 81 Gambar 1 5 x 5 cm 5 x 5 cm Percobaan 82 Gambar 2 5 x 5 cm 5 x 5 cm Percobaan 83 Gambar 3 5 x 5 cm 5 x 5 cm Percobaan 84 Gambar 4 5 x 5 cm 5 x 5 cm Percobaan 85 Gambar 5 5 x 5 cm 5 x 5 cm Persegi Panjang Percobaan 86 Gambar 1 3 x 2 cm 3 x 2 cm Percobaan 87 Gambar 2 3 x 2 cm 3.7 x 1.7 cm Percobaan 88 Gambar 3 3 x 2 cm 3 x 2 cm Percobaan 89 Gambar 4 3 x 2 cm 3 x 2 cm Percobaan 90 Gambar 5 3 x 2 cm 3 x 2 cm Percobaan 91 Gambar 1 4 x 3 cm 4 x 3 cm Percobaan 92 Gambar 2 4 x 3 cm 3.7 x 3 cm Percobaan 93 Gambar 3 4 x 3 cm 3.6 x 2.8 cm
22 Percobaan 94 Gambar 4 4 x 3 cm 3.8 x 3 cm Percobaan 95 Gambar 5 4 x 3 cm 3.8 x 3 cm Percobaan 96 Gambar 1 5 x 4 cm 5 x 4 cm Percobaan 97 Gambar 2 5 x 4 cm 5 x 3.5 cm Percobaan 98 Gambar 3 5 x 4 cm 5 x 3.5 cm Percobaan 99 Gambar 4 5 x 4 cm 4.5 x 4 cm Percobaan 100 Gambar 5 5 x 4 cm 4.5 x 3.7 cm Percobaan 101 Gambar 1 6 x 5 cm 5.5 x 4.8 cm Percobaan 102 Gambar 2 6 x 5 cm 5.7 x 4.3 cm Percobaan 103 Gambar 3 6 x 5 cm 5.7 x 4.3 cm Percobaan 104 Gambar 4 6 x 5 cm 5.4 x 4.4 cm Percobaan 105 Gambar 5 6 x 5 cm 5.4 x 4.6 cm Jajargenjang Percobaan 106 Gambar 1 3 x 2 cm 3 x 2 cm Percobaan 107 Gambar 2 3 x 2 cm 3 x 2 cm Percobaan 108 Gambar 3 3 x 2 cm 3 x 2 cm Percobaan 109 Gambar 4 3 x 2 cm 3 x 2 cm Percobaan 110 Gambar 5 3 x 2 cm 3 x 2 cm Percobaan 111 Gambar 1 4 x 3 cm 4 x 3 cm Percobaan 112 Gambar 2 4 x 3 cm 4 x 2.7 cm Percobaan 113 Gambar 3 4 x 3 cm 4 x 3 cm Percobaan 114 Gambar 4 4 x 3 cm 4 x 3 cm Percobaan 115 Gambar 5 4 x 3 cm 4 x 3 cm Percobaan 116 Gambar 1 5 x 4 cm 5 x 3.6 cm Percobaan 117 Gambar 2 5 x 4 cm 5 x 3.7 cm Percobaan 118 Gambar 3 5 x 4 cm 5 x 3.7 cm Percobaan 119 Gambar 4 5 x 4 cm 5 x 3.7 cm Percobaan 120 Gambar 5 5 x 4 cm 5 x 4 cm Percobaan 121 Gambar 1 6 x 5 cm 6 x 4.6 cm Percobaan 122 Gambar 2 6 x 5 cm 6 x 4.6 cm Percobaan 123 Gambar 3 6 x 5 cm 6 x 4.6 cm Percobaan 124 Gambar 4 6 x 5 cm 6 x 5 cm Percobaan 125 Gambar 5 6 x 5 cm 6 x 5 cm
Dalam beberapa percobaan yang telah dilakukan, untuk koordinasi ketiga motor sudah bisa menggambar bentuk yang ada di software yang rata-rata mendekati dengan skala gambar yang ada di software. Hanya saja ada beberapa bangun datar yang tidak sesuai dengan skala yang ada pada gambar di software. Hal ini disebabkan karena koordinat yang
23
dihasilkan pada software tidak sepenuhnya mengikuti garis luar yang telah ditentukan sehingga adanya objek yang melewati garis luar membuat koordinat berubah menjadi lebih kedalam atau keluar.
4.4 Analisis pada mekanik yang digunakan
Pada tugas akhir ini penulis membuat mekanik untuk robot drawing yang bertujuan untuk mengakuratkan posisi pergerakan motor dalam menggambar. Hanya saja pada kenyataannya pergerakan robot belum sepenuhnya akurat, masih ada eror yang terjadi dalam pergerakan robot, jadi penulis ingin menganalisis penyebab eror yang terjadi dari segi mekanik.
Untuk pergerakan dari motor ke base pensil dan base kertas, penulis menggunakan
timing belt sebagai penghubung pergerakan.
4.4.1 Tegangan (Stress) dan Regangan (Strain) Sumbu x
Gambar 4.9 Timing belt sumbu x.
Untuk mengetahui tegangan (stress) pada belting sumbu x penulis menggunakan perhitungan pada persamaan (3).
𝜎 =
𝐹𝐴(3)
Keterangan : 𝜎 = 𝑇𝑒𝑔𝑎𝑛𝑔𝑎𝑛 (𝑆𝑡𝑟𝑒𝑠𝑠) 𝐹 = 𝐺𝑎𝑦𝑎 𝑦𝑎𝑛𝑔 𝑑𝑖 𝑏𝑒𝑏𝑎𝑛𝑘𝑎𝑛 𝑝𝑎𝑑𝑎 𝑚𝑜𝑡𝑜𝑟 (𝑁) 𝐴 = 𝐿𝑢𝑎𝑠 𝑃𝑒𝑛𝑎𝑚𝑝𝑎𝑛𝑔 (𝑚2) Diketahui : F = 0,186 𝑁 d = 15 cm r = 7,5 cmGaya berat yang bekerja pada motor dapat diketahui dengan menggunakan persamaan (5)
𝐹 = 𝑚 𝑥 𝑔 (5)
Diketahui :
m = 19 g = 0,019 kg g = 9,8 m/s2
24 𝐹 = 𝑚 𝑥 𝑔 𝐹 = 0,019 x 9,8 𝐹 = 0,186 𝑁 𝐴 = 𝜋 𝑥 𝑟2 = 3,14 𝑥 (7,5)2 = 3,14 𝑥 56,25 𝐴 = 176,625 𝑁/𝑚2 𝜎 =𝐹 𝐴 = 0,186 176,625 = 0.001 𝑁/𝑚2
Jadi tegangan (stress) pada timing belt untuk sumbu x adalah sebesar 0.001 N/m2 Untuk mengetahui pertambahan panjang pada belting sumbu x bisa mengetahui dari cara mencari dengan menggunakan rumus renggangan (strain) pada persamaan (4).
𝜀 =
∆𝑥 𝑥 (4) Keterangan : 𝜀 = 𝑟𝑒𝑛𝑔𝑔𝑎𝑛𝑔𝑎𝑛 𝑥 = 𝑝𝑎𝑛𝑗𝑎𝑛𝑔 𝑚𝑢𝑙𝑎 − 𝑚𝑢𝑙𝑎 ∆𝑥 = 𝑝𝑒𝑟𝑡𝑎𝑚𝑏𝑎ℎ𝑎𝑛 𝑝𝑎𝑛𝑗𝑎𝑛𝑔 Diketahui : 𝑥 = 30 𝑐𝑚 ∆𝑥 = 0,4 𝑐𝑚 𝜀 = ∆𝑥 𝑥 𝜀 = 0,4 30 𝜀 = 0,01 𝑐𝑚25
4.4.2 Tegangan (Stress) dan Regangan (Strain) Sumbu y
Gambar 4.10 Timing belt sumbu y.
Untuk mengetahui tegangan (stress) pada belting sumbu y penulis menggunakan perhitungan pada persamaan (3).
𝜎 =
𝐹 𝐴(3)
Keterangan : 𝜎 = 𝑇𝑒𝑔𝑎𝑛𝑔𝑎𝑛 (𝑆𝑡𝑟𝑒𝑠𝑠) 𝐹 = 𝐺𝑎𝑦𝑎 𝑦𝑎𝑛𝑔 𝑑𝑖 𝑏𝑒𝑏𝑎𝑛𝑘𝑎𝑛 𝑝𝑎𝑑𝑎 𝑚𝑜𝑡𝑜𝑟 (𝑁) 𝐴 = 𝐿𝑢𝑎𝑠 𝑃𝑒𝑛𝑎𝑚𝑝𝑎𝑛𝑔 (𝑚2) Diketahui : F = 0,127 𝑁 d = 15 cm r = 7,5 cmGaya berat yang bekerja pada motor dapat diketahui dengan menggunakan persamaan (4) 𝐹 = 𝑚 𝑥 𝑔 (5) Diketahui : m = 19 g = 0,019 kg g = 9,8 m/s2 Diketahui : m = 13 g = 0,013 kg g = 9,8 m/s2 𝐹 = 𝑚 𝑥 𝑔 𝐹 = 0,013 x 9,8 𝐹 = 0,127 𝑁 𝐴 = 𝜋 𝑥 𝑟2 = 3,14 𝑥 (7,5)2 = 3,14 𝑥 56,25 𝐴 = 176,625 𝑁/𝑚2
26
𝜎 =𝐹 𝐴 =
0,127
176,625= 0,0007 𝑁/𝑚2
Jadi tegangan (stress) pada timing belt untuk sumbu y adalah sebesar 0,007 N/m2
Untuk mengetahui pertambahan panjang pada belting sumbu y bisa mengetahui dari cara mencari dengan menggunakan rumus renggangan (strain) pada persamaan (4).
𝜀 =
∆𝑥𝑥 (4) Keterangan : 𝜀 = 𝑟𝑒𝑛𝑔𝑔𝑎𝑛𝑔𝑎𝑛 𝑥 = 𝑝𝑎𝑛𝑗𝑎𝑛𝑔 𝑚𝑢𝑙𝑎 − 𝑚𝑢𝑙𝑎 ∆𝑥 = 𝑝𝑒𝑟𝑡𝑎𝑚𝑏𝑎ℎ𝑎𝑛 𝑝𝑎𝑛𝑗𝑎𝑛𝑔 Diketahui : 𝑥 = 30 𝑐𝑚 ∆𝑥 = 0,3 𝑐𝑚 𝜀 = ∆𝑥 𝑥 𝜀 = 0,3 30 𝜀 = 0,015 𝑐𝑚Jadi renggangan pada timing belting sumbu y adalah sebesar 0,015 cm.
Dari tegangan (stress) dan regangan (strain) pada belting sumbu x dan y dapat dilihat bahwa beban yang ada pada belting dapat mempengaruhi pertambahan panjang pada belting sumbu x dan y.
Untuk base pada robot penulis menggunakan software inventor untuk membantu menganalisis stress pada base dengan tujuan untuk melihat ketahanan dari base robot ketika diberi beban. Penulis menggunakan mekanik yang sebelumnya telah penulis buat pada
software inventor sesuai dengan bahan-bahan yang penulis pakai untuk pembuatan mekanik tugas akhir ini. Kemudian penulis memasukkan beban yang ada pada peralatan yang ada pada mekanik dan penulis mensimulasikannya. Berikut adalah hasil dari analisis stress pada
27
Gambar 4.11 Hasil analisis stress pada inventor.
Dari hasil gambar 4.11 dapat dilihat bahwa tekanan yang terjadi pada base robot sebesar 0 – 0,996 yang berarti hampir tidak ada tekanan yang terjadi pada mekanik robot dengan beban yang ada pada mekanik. Hanya saja karena basenya dari kayu jadi tidak akan tahan lama. Jadi mekanik seperti ini dengan beban mekanik yang ada, robot dapat bergerak sesuai dengan apa yang telah di tentukan oleh program untuk bisa menggambar apa yang telah di tentukan pada software.
28
BAB V
KESIMPULAN DAN SARAN
5.1Kesimpulan
Berdasarkan hasil dan analisa serta pembahasan maka dapat disimpulkan sebagai berikut:
1. Alat ini dapat digunakan untuk menggambar suatu objek yang di gambar pada
software kedalam bentuk real 2D pada kertas A4.
2. Pada sistem yang digunakan berhasil menerapkan metode GRBL atau metode cnc kedalam arduino dan kemudian arduino dapat membaca file yang berbentuk g-code lalu mengkoordinasikan ketiga motor yaitu 2 motor stepper dan 1 motor servo untuk membentuk suatu gambar.
5.2 Saran
Untuk penelitian sistem lebih lanjut kedepannya perlu ditambahkan beberapa saran sebagai berikut:
1. Untuk pembuatan mekanik harus diperhitungkan sejak awal karena dari segi mekanik sangat berpengaruh kepada pergerakan robot dalam menggambar.
29
DAFTAR PUSTAKA
[1] Nugroho Agustinus W A. “Lengan Robot Penggambar Bidang Dua Dimensi Berbasis Mikrokontroler Dengan PC,” S1, Fakultas Sains Dan Teknologi Universitas Sanata Dharma, Yogyakarta, 2015.
[2] Syahrul, “Motor Stepper : Teknologi, Metoda dan Rangkaian Kontrol”, majalah ilmiah unikom, vol.6, no.2, Mei 2011.
[3] Anonim. “GRBL”. Internet : https://github.com/grbl/grbl/wiki, 30 Juni 2018. [4] Parulian Obil. “Motor Stepper”. Internet :
http://obilparulian.blogspot.com/2012/06/motorstepper-motor-stepper-adalah.html, 30 Juni 2018.
[5] Anonim. “Motor Servo.” Internet : http://elektronika-dasar.web.id/motor-servo/, Tanggal 4 April 2017.
[6] Anonim. “Wiring L293D uno/mega shield with stepper motor”. Internet : http://www.14core.com/controlling-the-l293d-unomega-shield-with-stepper-motor/, tanggal 3 April 2017.
[7] Anonim. “Stepper Motors, Drivers and Controllers”. Internet :
http://www.orientalmotor.com/stepper-motors/index.html, tanggal 3 April 2017. [8] Anonim. “Perbedaan tegangan dan regangan”. Internet :
https://blog.ruangguru.com/perbedaan-tegangan-dan-regangan, 30 juni 2018. [9] Ananonim. “Motor Shield”. Internet :
30
LAMPIRAN
BIOGRAFI PENULIS
Nama : Gusti Amasta
Tempat/tanggal lahir : Jambil, 18 Juli 1996
Agama : Islam
Alamat Rumah : Perum. Bambu kuning puskopkar blok c 20 no 8 batu aji, Batam
Email : [email protected]
Riwayat Pendidikan :
1. 2011 – 2014 : SMK Negeri 1 Batam
2. 2008 – 2011 : SMP Negeri 26 Batam
![Gambar 2.4 Pensinyalan Motor Servo[5]](https://thumb-ap.123doks.com/thumbv2/123dok/3181547.2344010/18.893.325.640.670.1127/gambar-pensinyalan-motor-servo.webp)
![Gambar 2.5 Driver Motor Shield L293D[6].](https://thumb-ap.123doks.com/thumbv2/123dok/3181547.2344010/19.893.299.684.288.567/gambar-driver-motor-shield-l-d.webp)