2020 PROSIDING
Tema “Penguatan Sumber Daya Manusia yang Tersertifikasi ”
Kamis, 30 Juli 2020
SEMINAR ANTAR PERGURUAN TINGGI
PROSIDING
SEMINAR ANTAR PERGURUAN TINGGI
Tema “ Penguatan Sumber Daya Manusia yang Tersertifikasi ”
Kamis, 30 Juli 2020
SUSUNAN PANITIA
Penanggung Jawab
Nur Rohman Rosyid, S.T., M.T., D.Eng (Ketua Departemen TEDI SV UGM )
Ketua Panitia
Ma’un Budiyanto, S.T., M.T.
Koordinator Seminar Arkhan Subari, S.T., M.Kom.
Tim Pelaksana
Koordinator Panitia :Jimmy Trio Putra, S.T., M.Eng.
Sekertaris : Ir. Lukman Subekti, MT.
Bendahara :Nur Sulistyawati, S.T., M.T.
DDD & Editing : David Arief Fadhilah Perlengkapan : Andika Isna Rahyuni Acara & Tim Kreatif : Yuniarto, S.T., M.T.
Liaison Officer : Eko Ariyanto Yuniarto Kesekretariatan : Drs. Heru Winarno, MT.
TIM REVIEWER
1. Yuniarto, S.T., M.T..
2. Ir. Lukman Subekti, MT.
3. Budi Bayu Murti, S.T., M.T.
4. Arkhan Subari, S.T., M.Kom.
5. Maun Budiyanto, ST., MT.
6. Drs. Heru Winarno, MT.
Alamat Sekretariatan
Sekolah Vokasi Universitas Gadjah Mada
Jl. Yacaranda, Sekip Unit IV, Yogyakarta. 55281 Tlp : (0274) 6491302
Website : https://tedi.sv.ugm.ac.id Email : [email protected]
SAMBUTAN KETUA PANITIA
Puji syukur atas kehadirat Allah SWT yang telah memberikan limpahan kenikmatan dan keberkahan yang tidak terhingga kepada kita semua sehingga kita dapat melaksanakan seminar antar perguruan tinggi pada hari ini. Kami mengucapkan terima kasih kepada Bapak/Ibu Dosen yang telah mengikuti seminar ini.
Seminar antar perguruan tinggi ini bertujuan untuk mendiskusikan hasil penilitian dosen. Seminar ini merupakan acara yang diselenggarakan oleh Program Studi Teknologi Rekayasa Elektro Universitas Gadjah Mada dan Program Studi Teknik Listrik Industri Universitas Diponegoro.
Seminar ini merupakan tanggung jawab UGM-UNDIP sebagai institusi nasional dalam menguatkan kemajuan bangsa. Pada seminar ini akan dipresentasikan hasil-hasil penelitian dari institusi UGM-UNDIP. Dengan demikian diskusi dapat dilakukan sebagai penguatan keilmuan secara teoritis.
Akhir kata, jika ada kekurangan dalam penyelenggaraan seminar ini, kami mohon maaf. Selamat mengikuti seminar, semoga bermanfaat untuk kemajuan kita semua.
Yogyakarta, 29 Juni 2020 Ketua Panitia
Maun Budiyanto
SUSUNAN ACARA SEMINAR ANTAR PERGURUAN TINGGI Bertema “Penguatan Sumber Daya Manusia yang Tersertifikasi”
Kamis, 30 Juli 2020
WAKTU KEGIATAN NARASUMBER MATERI
07.45 - 07.50 Pembukaan MC 07.50 - 08.00 Laporan Ketua
Panitia Maun Budiyanto Laporan Pelaksanaan Seminar 08.00-08.10
Pembukaan
Dekan SV Universitas Gadjah Mada
Sambutan 08.10-08.20 Dekan SV Universitas
Diponegoro 08.20-08.35
Presentasi
1. Brillian Rizki Adji Santoso
2. Maun Budiyanto
RANCANGAN SISTEM MONITORING SEL BATERAI GARDU INDUK 110V DC PADA GARDU INDUK 150kV PANDEAN LAMPER
08.35-08.50
1. Hagai Vinny Anderson 2. Lukman Subekti
PENGARUH GEOMETRI LEBAR TEETH PADA TORSI MAGNET SYNCHRONOUS GENERATOR MENGGUNAKAN DESIGN ELECTROMAGNETIC 08.50-09.05
1. Jasmine Aulia 2. Eko Ariyanto 3. Yuniarto
SISTEM PENGAMAN SEPEDA MOTOR DENGAN APLIKASI SMARTPHONE BERBASIS IoT (INTERNET of THINGS) 09.05-09.20
1. Risma Diyah Pramesti
2. Yulianus Wahyo Setiyono
PERENCANAAN INSTALASI PENERANGAN DENGAN DIALUX EVO 8.0 DI PT ULTRA PRIMA ABADI JOMBANG
09.20-09.35 1. Dian Kusuma Jati 2. Maun Budiyanto
PERANCANGAN DAN IMPLEMANTASI SISTEM
MONITORING DAN PENGAMAN KANDANG AYAM PETELUR DENGAN NRF24L01
09.35-09.50
1. Arum Kartika Sari 2. Arkhan Subari 3. Priyo Sasmoko
SIMULASI MANUVER JARINGAN DISTRIBUSI TEGANGAN MENENGAH SECARA OTOMATIS BERBASIS ARDUINO MEGA 2560 DENGAN
MENGGUNAKAN VT SCADA 09.50-10.05
1. Bella Kartika Dewi
2. Yulianus Wahyo Setiyono
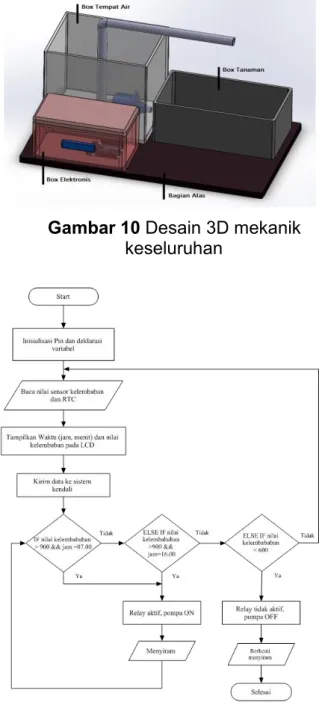
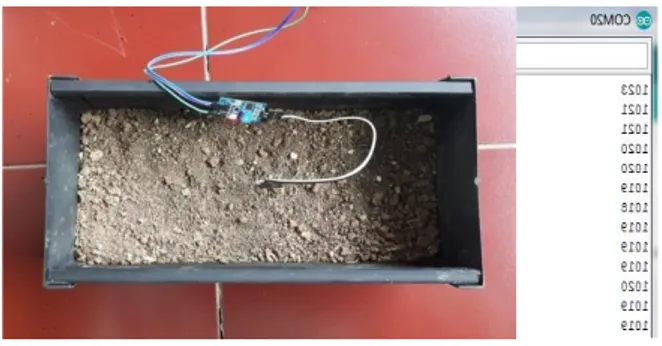
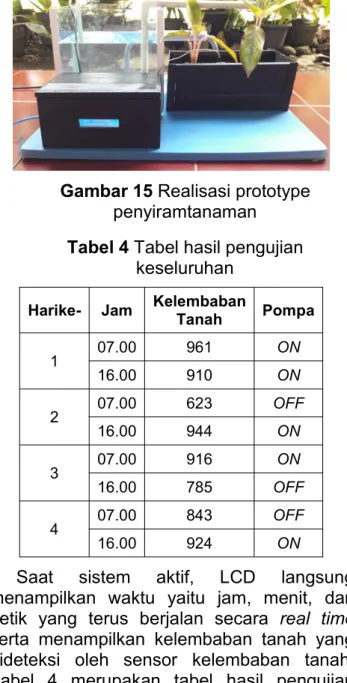
PROTOTYPE PENYIRAM TANAMAN KEBUN SECARA TERJADWAL BERBASIS ARDUINO
10.05-10.20
1. Cholifah Ma’rifadiyah 2. Maun Budiyanto
SISTEM MONITORING PARKIR BERBASIS PLC DAN TERJARINGKAN DENGAN IOT
10.20-10.35
1. Febrian Nur Addinta Kurnia 2. Saiful Manan
SIMULASI OVER CURRENT RELAY SEBAGAI PROTEKSI CADANGAN LOKAL UNTUK GANGGUAN ARUS LEBIH PADA PENGHANTAR 150 KV BERBASIS SIEMENS S7-1200 PLC 10.35-10.50
1. Jilan Rihadatul Aisy Husniah 2. Maun Budiyanto
RANCANG BANGUN TRAINER PENGENDALI LAMPU BERBASIS PROGRAMMABLE LOGIC
CONTROLLER (PLC)
10.50-11.05 1. S. Marisa 2. Maun Budiyanto
IMPLEMENTASI PROGRAMMABLE LOGIC CONTROLLER SEBAGAI KENDALI SISTEM MONITORING PARKIR OTOMATIS
11.05-11.20
1. Nur Fahmi Fauziati Wibowo
2. Heru Winarno
REALIZATION OF INDUSTRIAL BASED TEMPERATURE HEATING CONTROL MODULE
11.20-11.35 1. Aprilia Sri Haryani 2. Maun Budiyanto
ANALISA PENGGUNAAN KAPASITOR BANK UNTUK MEMPERBAIKI
FAKTOR DAYA PADA JALUR BEBAN TRAFO 500 kVA DI BANDAR UDARA INTARNASIONAL ADISUJIPTO YOGYAKARTA
11.35-11.45 Penutupan Universitas
Gadjah Mada Penutupan
DAFTAR ISI
PERBAIKAN PERANGKAT KENDALI MESIN WINDING “HEINRICH SCHUMANN MODEL SELECTA 260” DI PT. CG POWER SYSTEMS INDONESIA...1 PENYEIMBANGAN BEBAN TRAFO DISTRIBUSI SATU FASA GUNA
PENGURANGAN ARUS NETRAL RAYON MAGELANG KOTA... 11 SETTING RECLOSER MENGGUNAKAN APLIKASI WSOS 5 DAN MICROSOFT EXCEL PADA PENYULANG JAJAR 4 PT. PLN AREA SURAKARTA... 18 RANCANG BANGUN REMOTE CONTROL PENGENDALI PELAMPUNG JARAK JAUH DENGAN WIRELESS MODULE TRANSCEIVER NRF24L01+PA+LNA...25 PERENCANAAN KUBIKEL KOPEL SEBAGAI ALTERNATIF PELIMPAHAN
BEBAN GARDU INDUK 150KV TAMBAK LOROK... 31 PROTOTYPE PENYIRAM TANAMAN KEBUN SECARA TERJADWAL BERBASIS ARDUINO...39 PERENCANAAN INSTALASI PENERANGAN DENGAN DIALUX EVO 8.0 DI PT ULTRA PRIMA ABADI JOMBANG... 47 SISTEM MONITORING PARKIR BERBASIS PLC DAN TERJARINGKAN
DENGAN IOT... 57 RANCANGAN SISTEM MONITORING SEL BATERAI GARDU INDUK 110V DC PADA GARDU INDUK 150kV PANDEAN LAMPER...65 PENGARUH GEOMETRI LEBAR TEETH PADA TORSI MAGNET
SYNCHRONOUS GENERATOR MENGGUNAKAN DESIGN ELECTROMAGNETIC ... 70 ANALISA PENGGUNAAN KAPASITOR BANK UNTUK MEMPERBAIKI FAKTOR DAYA PADA JALUR BEBAN TRAFO 500 kVA DI BANDAR UDARA
INTARNASIONAL ADISUJIPTO YOGYAKARTA... 79 PERANCANGAN DAN IMPLEMANTASI SISTEM MONITORING DAN PENGAMAN KANDANG AYAM PETELUR DENGAN NRF24L01...82 SISTEM PENGAMAN SEPEDA MOTOR DENGAN APLIKASI SMARTPHONE BERBASIS IoT (INTERNET of THINGS)...89 SIMULASI DAN MONITORING PEMBACAAN 6 STATUS PANEL RTU SCADA PADA RECLOSER BERBASIS ARDUINO MEGA 2560 DENGAN TAMPILAN HUMAN MACHINE INTERFACE (HMI) MENGGUNAKAN WEINTEK MTV-100...92 SIMULASI OVER CURRENT RELAY SEBAGAI PROTEKSI CADANGAN LOKAL UNTUK GANGGUAN ARUS LEBIH PADA PENGHANTAR 150 KV BERBASIS SIEMENS S7-1200 PLC...101 SIMULASI MANUVER JARINGAN DISTRIBUSI TEGANGAN MENENGAH
SECARA OTOMATIS BERBASIS ARDUINO MEGA 2560 DENGAN
MENGGUNAKAN VT SCADA...111
PERBAIKAN PERANGKAT KENDALI MESIN WINDING
“HEINRICH SCHUMANN MODEL SELECTA 260”
DI PT. CG POWER SYSTEMS INDONESIA
Hendi Winarno ,Dhanis Woro Fittrin
Departemen Teknik Elekto Dan Informatika, Sekolah Vokasi, Universitas Gadjah Mada,Yogyakarta
Email: [email protected], [email protected] [email protected]
ABSTRAK: Mesin winding merupakan salah satu perangkat yang penting industri pembuatan transformator. Kerusakan yang sering terjadi adalah kerusakan pada bagian sistem pengaturan kecepatan perputaran mandrel dan pada sistem pengereman.
Kerusakan pada sistem pengaturan kecepatan terjadi karena rusaknya atau terganggunya kinerja perangkat-perangkat pengatur kecepatan atau putusnya konektifitas diantaranya, setelah dilakukan pemeriksaan ternyata ditemukan kerusakan pada konektifitas keluaran sensor proximity induktif yang putus. Perbaikan yang dilakukan adalah dengan penyambungan kembali kabel tersebut. Kerusakan pada bagian sistem pengereman dapat terjadi karena rusaknya atau terganggunya kinerja perangkat-perangkat sistem pengereman atau putusnya konektifitas diantaranya, setelah dilakukan pemeriksaan ditemukan kerusakan diakibatkan menurunnya induktifitas dari bagian elektromagnetis yang diakibatkan salah satu perangkat isolasi kumparan (dwarspie) terjepit di dalamnya dan kotornya bagian ini akibat debu yang menggumpal dan terkena cairan oli pelumas.
Perbaikan yang dilakukan adalah dengan mengeluarkan dwarspie, membersihkan debu, dan memperkecil jarak magnet buatan dengan besi pengerem.
Kata kunci: Kumparan, mesin winding, pengereman, pengaturan kecepatan.
ABSTRACT: Winding machine is one of the important equipments in transformator industry. Damage that often occurs is damage to the mandrel rotation speed regulation system and to the braking system. Damage to the speed regulation system occurs due to damage or disruption to the performance of speed regulating devices or the breakdown of connectivity including, after inspection it turns out to be found damage to the broken inductive proximity sensor output connectivity. Repair is done is to reconnect the cable.
Damage to the braking system can occur due to damage or disturbance in the performance of the braking system devices or the broken connectivity between them, after inspection it is found that the damage is caused by decreasing the inductiveity of the electromagnetic parts caused by one of the coil insulation devices (dwarspie) and the dirtyness of this section due to dust that clots and is exposed to lubricating oil fluid. The repairs are done by removing dwarspie, cleaning dust, and reducing the distance of artificial magnets with braking iron.
Keywords: Braking, dwarspie, speed regulation, winding machine
PENDAHULUAN
Kebutuhan dunia industri pembuatan transformator akan adanya mesin winding
merupakan sebuah keharusan. Mesin ini akan membuat sebuah komponen utama
dari transformator daya yaitu coil atau kumparan
Kerusakan pada sebuah mesin windingtentu saja akan mengganggu dan bahkan menghentikan kegiatan. Oleh sebab itu maka diperlukan adanya sebuah perbaikan yang tepat dan cepat pada mesin winding yang sedang rusak dalam menunjang proses produktifitas dari pabrik
Mesin winding adalah mesin yang digunakan untuk membuat kumparan/coil pada silinder. Mesin ini akan menarik logam konduktor yang berada pada gulungan awalnya pada roll rack decoiler menuju silinder yang ukurannya telah disesuaikan dengan daya transformator daya yang akan dibuat diatas mandrel pada mesin winding.
Gambar 1 Mesin Winding Tabel 1 Spesifikasi Mesin Winding.
Perangkat – perangkat kendali mesin ini adalah:
1. Pedal kendali 2. Panel kendali
3. Frekunesi konverter 4. Sistem mekanis
5. Pengendali kecepatan sensor proximity ( TURCK )
6. Sistem pengereman
elektromagnetis
Perangkat ini digunakan untuk mengendalikan perputaran dari motor pada mesin winding ini. Pada alat ini terdapat beberapa fungsi yang akan memudahkan operator untuk membelitkan logam konduktor pada silinder yang telah diletakan pada mandrel.
Pada satu mesin winding terdapat 2 pedal kendali yang ditujukan untuk memudahkan pengoperasian mesin winding tersebut baik dari sisi samping kiri maupun dari sisi samping kanan .
Gambar 2 Pedal kendali tampak samping
Pada pedal pengendali ini terdapat fasilitas pengendalian :
1. Forward selector
Merupakan pedal pijakan yang digunakan untuk mengatur putaran pada mesin winding maju atau searah dengan jarum jam.
2. Reverse selector
Merupakan pedal pijakan yang digunakan untuk mengatur putaran pada mesin winding mundur atau berlawanan dengan arah jarum jam.
3. Speed adalah pedal pijakan untuk mengatur kecepatan perputaran motor yang akan mengerakan system Daya Motor Pengerak 5,5 KW
Tegangan Input 380 Volt
Phase 3
Kecepatan 1500 rpm
Speed ratio 1,4
Tinggi pusat dari lantai 1150 mm Tinggi pusat dari “bed” 950 mm Beban maksimal pada
“faceplate” 3000 Kg
Beban maksimal pada
pusat 6000 Kg
Tegangan Kontrol 24 Volt DC Arus Elektromagnetis 3,5 Ampere Keluaran Sensor
Proximity Induktif 0 – 10 Volt Gear Level (sistem
mekanis) 9 Level
mekanis dan kemudian memutarkan mandrel tempat silinder winding.
4. Brake realease
Merupakan pedal pijakan yang akan melepas pengereman otomatis yang akan dilakukan oleh mesin winding saat tidak diberikan perintah untuk memutar motor (pedal speed diinjak ).
5. Emergency stop
Merupakan pedal yang digunakan untuk memutus arus utama yang memberikan suplay tenaga pada mesin winding, dengan begitu setiap fungsi elektris pada mesin winding mati. Pedal ini biasanya digunakan pada keadaan darurat.
Gambar 3 Panel Kendali
Panel ini berisi beberapa tombol perintah untuk mengontrol mesin namun tidak selengkap pada pedal pengendali.
Fungsi kendali yang ada pada panel pengendali adalah :
1. Switch automatic brake systems Merupakan switch yang digunakan untuk mengatur kerja dari sistem pengereman apakah akan otomatis (mesin winding akan otomatis mengerem saat pedal speed tidak diinjak )
2. Indikator arah perputaran mesin Merupakan indikator yang akan memberitahukan pada operator switch dari forward pedal atau dari reverse pedal yang sedang digunakan pada mesin.
3. Indikator power
Merupakan indikator yang akan memberitahukan pada operator apakah mesin sedang hidup atau sedang mati.
Frekuensi konverter adalah pengendali pergerakan motor yang menjadi penggerak dari mesin winding secara keseluruhan. Frekuensi konverter akan mengatur setiap besaran elektris yang akan mempengaruhi pergerakan motor dari saat motor berhenti kemudian mulai bergerak dan hingga berhenti kembali. Variabel – variabel elektris yang diatur dalam frequency converter diantaranya adalah :
1. Local Reference ( Hz ) 2. Minimum speed ( Hz ) 3. Maximum speed ( Hz ) 4. Jogging speed ( Hz ) 5. Ramp time up ( s ) 6. Ramp time down ( s ) 7. Trip reset mode 8. Trip – delay time ( s ) 9. Warning frequency ( Hz ) 10. Warning current ( A ) 11. DC – braking time ( s )
Sistem ini adalah kumpulan perangkat yang berada di dalam mesin winding ini untuk mengatur perubahan nilai kecepatan dan torsi dari mesin ini saat dioperasikan. Terdapat 9 level speed yang berbeda dari mesin ini yang dapat diatur oleh operator. Nilai torsi yang besar digunakan untuk menarik beban-beban selama proses winding ini.
Tabel 2 Kecepatan dan torsi pada masing–masing transmisi
No Speed
( RPM ) Torque ( Nm )
1 1,6 1600,0
2 2,2 1100,0
3 3,2 800,0
4 4,5 560,0
5 6,3 400,0
6 9,0 280,0
7 12,0 200,0
8 18,0 140,0
9 25,0 100,0
Sensor proximity speed control (TURCK ), Komponen ini digunakan untuk mengatur besarnya nilai tegangan yang akan diterima oleh inverter. Data tegangan ini digunakan sebagai acuan informasi seberapa besar nilai frekuensi yang harus dihasilkan oleh inverter.
Besarnya tegangan yang akan disuplai ini adalah antara 0 – 10 volt DC. Nilai dari tegangan yang disuplai ini akan bergantung pada jarak kepala komponen dengan plat logam, jarak ini akan dipengaruhi oleh seberapa dalamnya operator mesin winding meninjak pedal speed. Semakin dalam operator mesin winding menginjak tuas speed maka jarak kepala komponen ini dengan plat konduktor akan semakin jauh sehingga tegangan yang disuplai akan semakin besar.
Gambar 4 Sensor proximity TURCK pada pedal speed
Pengereman pada mesin winding ini diperlukan untuk menahan mandrel agar tidak bergerak selain dengan menginjak speed pedal ataupun brake release pedal. Dengan adanya pengereman pada mesin winding ini juga menjaga agar mandrel dapat menahan gaya tarik dari logam konduktor yang melilitnya dengan roll logam konduktor lama yang berada di roll rack. Sistem pengereman ini menggunakan sejumlah daya DC untuk dapat mengubah sifat dari bahan logam menjadi magnet buatan.
Logam yang dibuat menjadi magnet buatan ini nantinya akan digunakan sebagai rem untuk menahan laju dari perputaran motor winding, sedangkan besarnya tegangan DC yang digunakan untuk mengubah logam tersebut menjadi
magnet buatan adalah 24 volt. Sistem pengereman ini dapat diatur menjadi 2
mode. Mode pertama akan
menghidupkan sistem pengereman otomatis sedangkan pada mode kedua adalah mode mematikan pengereman otomatis. Pengereman otomatis yaitu mesin winding akan mengaktifkan pengereman selama pedal speed tidak diinjak atau selama pedal brake release tidak diinjak.
Gambar 5 Sistem elektromagnetis pengereman
METODE
Kerusakan pada errornya fungsi pedal kendali yaitu fungsi speed yang ditandai dengan putaran motor pada mesin winding tidak dapat berputar sama sekali.
Gambar 6 Skematik Speed
Perbaikan pada kerusakan ini dilakukan dengan mendeteksi perangkat apakah yang mengalami kerusakan berdasarkan jalannya kendali pada pengaturan kecepatan. Perangkat yang mungkin mengalami kerusakan adalah pedal kendali, kabel penghubung pedal kendali ke panel pusat wiring, koneksi–
koneksi pada panel pusat wiring, dioda, kabel penghubung panel pusat wiring dengan frekuensi konverter, frekuensi konverter, kabel penghubung frekuensi konverter ke motor AC, dan sistem mekanis. Kerusakan pada mesin ini ditandai dengan tidak dapat berfungsinya pengaturan kecepatan dari salah satu pedal kendali, sedangkan dengan menggunakan pedal kendali lainnya dapat berfungsi dengan normal.
Dilakukan penukaran
penyambungan terminal penghubungan antara 2 pedal kendali dan panel pusat wiring. Tindakan ini dilakukan untuk mengecek kualitas dari kinerja semua perangkat pengatur kecepatan selain pedal kendali. Ternyata pedal kendali yang tadinya normal saat dipasang pada terminal pedal kendali yang tadinya rusak masih dapat bekerja dengan normal, sedangkan pedal kendali yang tadinya rusak bila dipasang pada terminal pedal kendali tadinya normal tetap tidak dapat melakukan pengaturan kecepatan dengan normal. Hal ini menunjukan setiap perangkat pengatur kecepatan selain pada pedal kendali pada mesin winding masih normal.
Perbaikan dikerjakan pada pedal kendali. Dilakukan pengecekan ulang untuk memastikan bahwa tidak terjadi kerusakan pada bagian setelah pedal kendali dilakukan dengan mengukur tegangan yang berikan oleh panel pusat wiring menuju inverter berdasarkan gambar skematik diatas yaitu pada terminal 56 di inverter. Kerusakan pada bagian keluaran inverter yang memberi suplai tegangan untuk mengerakan motor tidak dicheck karena bila terjadi kerusakan pada inverter teknisi
Departemen Maintenance and Engineering tidak dapat memperbaikinya, kerusakan semacam ini biasanya melibatkan kerja sama dari vendor diluar pabrik.
Pada semua titik jalur komunikasi antara sensor pengatur kecepatan pedal 2 (jalur komunikasi diode V3.0, X13, X21) ke frekuensi konverter tidak menunjukan nilai seharusnya dimana tegangan ini bukan nilai tegangan diproduksi oleh pengaturan speed, yaitu komponen TURCK. Sensor ini seharusnya menghasilkan tegangan 0 – 10 volt kemungkinan terjadi kerusakan sensor pengatur kecepatan.
Pengecekan kemudian dilakukan pada sensor pengatur kecepatan (komponen pengatur speed berupa proximity TURCK) karena seperti yang terlihat pula pada skematik bahwa sensor inilah yang menjadi masukan pada frekuensi konverter untuk dapat bekerja, ternyata didapati ada kabel yang putus yaitu kabel proximity TURCK dengan terminal pada pedal kendali. Kabel ini diduga sebagai kabel keluaran yang akan mensuplai sejumlah tegangan keluaran sensor proximity TURCK berapa tegangankah yang akan disuplai ke panel pusat wiring lalu ke inverter sebagai informasi besarnnya frekuensi yang akan dihasilkan untuk memutar motor.
Gambar 7 Skematik sistem pengereman
Sistem pengereman pada mesin ini kadang loose / tidak bekerja walau mode pengereman yang dipilih adalah mode pengereman otomatis sedangkan pedal brake release dan pedal speed tidak ditekan.
Perbaikan diawali dengan mengecek pengaturan yang dilakukan oleh operator mesin winding pada pedal kenali maupun panel kendali. Mengukur nilai tegangan DC yang ada di bagian elektromagnetis dari sistem brake ini, seperti yang terlihat pada gambar skematik diatas bahwa bagian ini merupakan bagian output dari sistem pengereman yaitu pada titik X1.0.
Tegangan yang terukur ternyata 23.89 volt dan arus pada 3,5 Ampere, tegangan ini dikatakan normal karena tegangan yang seharusnya bernilai 24 volt dan arus pada 3,5 Ampere. Data tegangan seharusnya ini dapat dilihat dari buku manual dari mesin winding tersebut.
Dari data tersebut maka dapat dikatakan rangkaian elektris dari sistem pengereman tidak mengalami kerusakan, karena tegangan dan arus yang disuplai pada bagian aktuator elektromagnetis sebagai keluaran dari sistem pengereman nilainya mendekati 24 Volt DC dan 3,5 Ampere. Trouble shooting kemudian diarahkan pada bagian elektromagnetis dari sistem pengereman ini mungkin terjadi kerusakan mekanis.
Gambar 8 Perangkat pembersih kotoran pada bagian elektromagnetis
Pembersihan dari grease dilakukan dengan Contact Cleaner dan WD 40 serta scott bride. Bagian yang kotor oleh grease di gosok hingga tampak bersih. Untuk hasil yang optimal biasanya teknisi Departemen Maintenance and Engineering membersihkan setiap bagian dari elektromagnetis sistem pengereman.
Sepanjang pengalaman kerja dari teknisi Departemen Maintenance and Engineering yang sudah bekerja dari awal pabrik ini mulai berproduksi hingga sekarang dengan sistem perbaikian semacam ini kinerja dari sistem pengereman akan kembali normal.
Gambar 9 Sistem pengereman elektromagnetis yang belum dibersihkan
Gambar 10 Sistem pengereman elektromagnetis yang sudah dibersihkan HASIL DAN PEMBAHASAN
Pada perbaikan pengaturan kecepatan mesin winding berhasil. Hal ini dibuktikan dengan tegangan dari sensor proximity induktif telah dapat diinputkan
pada frekuensi konverter dengan optimal.
Setelah diukur pada keluaran sensor ini dan pada terminal masukan pada frekuensi konverter memiliki nilai tegangan yang normal yaitu pada 0-10 Volt DC. Bila diukur pada mode resistansi maka resistansi yang terukur pada 0,3 Ohm yang berarti hambatan kecil dan jalur komunikasi sensor dengan frekuensi konverter baik. Hasil dari perbaikan ini menunjukan kinerja mesin winding kembali normal, yaitu bila pedal speed diinjak maka akan mesin winding akan segera memutar mandrel yang terpasang.
Pada perbaikan ini dilakukan penyambungan kabel yang terputus yang kemudian disolder dengan timah. Hal ini dimaksudkan agar mesin ini tidak mengalami kerusakan yang sama pada waktu yang dekat. Teori perawatan dan perbaikan mesin Mean Time Before Failure, mengatakan perawatan dan perbaikan mesin yang baik adalah jika hasil dari perawatan dan perbaikan itu dapat meningkatkan MTBF. Jika penyambungan dilakukan pada kabel yang putus tersebut dilakukan maka akan semakin kecil kemungkinan terjadi putusnya kabel tersebut pada titik yang sama. Dugaan penyebab putusnya kabel tersebut adalah karena pedal kendali yang sering dipindah-pindah posisinya dan juga kemungkinan karena terjatuh dan menggantung sehingga kabel tersebut tertarik oleh beban mekanis dari pedal kendali sehingga kabel tersebut putus.
Pada metode trouble shooting dilakukan dengan menentukan perangkat-perangkat apa saja yang dipergunakan dalam pengaturan kecepatan perputaran mesin ini. Cara ini dilakukan untuk memperkecil MTTF yaitu Mean Time To Failure. MTTF adalah waktu yang diperlukan untuk proses perbaikan. Ketika sudah ditentukan perangkat-perangkat apa saja yang bekerja pada proses pengaturan kecepatan perputaran mesin ini maka akan dicari bagian mana yang mungkin
mengalami kerusakan. Penggunaan metode ini akan mengecilkan waktu MTTF karena dengan demikian teknisi perbaikan mesin ini akan dapat fokus mencari titik kerusakan pada bagian- bagian yang berfungsi mengatur kecepatan perputaran motor AC. Pada praktiknya kegiatan perbaikan ini memerlukan sekitar 6 jam.
Pada perbaikan sistem pengereman mesin winding berhasil. Hal ini dibuktikan sistem pengereman elektromagnetis akan segera bekerja menjadi magnet dan menghentikan pergerakan dari perputaran mandrel.
Kinerja dari sistem pengereman ini juga kembali normal yaitu bila ditekan pedal speed atau pedal brake release maka sistem pengereman akan terbuka dan saat pedal tersebut tidak diinjak maka sistem pengereman kembali bekerja.
Pengukuran besaran elektris pada jalur pengereman ini menunjukan nilai yang normal yaitu 23,89 Volt DC dan pada arus 3,5 Ampere. Pengukuran dilakukan pada bagian keluaran yang normal menandakan setiap komponen dan koneksi dari bagian masukan hingga keluran tidak terdapat masalah/normal.
Pada perbaikan ini dilakukan pembersihan dan pengaturan ulang (penyesuaian ulang/adjust) pada bagian elektromagnetis pengereman. Masalah yang ditemui pada masalah pengereman yang sering loose ini sebenarnya adalah adanya salah satu kelengkapan isolasi kumparan yaitu dwarspie yang terjepit di
dalam sistem pengereman
elektromagnetis, namun dengan tujuan untuk memperpanjang nilai MTBF maka dilakukan pembersihan total setiap bagian pada sistem pengereman elektromagnetis dan penyesuaian ulang jarak sistem pengereman elektromagnetis dengan pengerem mesin ini. Teori perawatan dan perbaikan mesin Mean Time Before Failure, mengatakan perawatan dan perbaikan mesin yang baik adalah jika hasil dari perawatan dan perbaikan itu dapat meningkatkan MTBF.
Jika pembersihan dan penyesuain ulang jarak pada sistem pengereman elektromagnetis tersebut dilakukan maka akan semakin kecil kemungkinan terjadi penurunan kekuatan induksi magnet
pada sistem pengereman
elektromagnetis tersebut. Dugaan penyebab penurunan kekuatan induksi magnet tersebut adalah selain karena terdapat salah satu kelengkapan isolasi kumparan (dwarspie) juga karena kotornya sistem pengereman elektomagnetis akibat debu yang menggumpal karena terkena oli pelumas maupun akibat kelembapan udara.
Pada metode trouble shooting dilakukan dengan menentukan perangkat-perangkat apa saja yang dipergunakan dalam sistem pengereman mesin ini. Cara ini dilakukan untuk memperkecil MTTF yaitu Mean Time To Failure. MTTF adalah waktu yang diperlukan untuk proses perbaikan.
Ketika terdapat masalah pada mesin winding maka divisi produksi khususnya departemen winding akan memberikan laporan kepada divisi Maintenance and Engineering untuk dapat melakukan perbaikan terhadap mesin winding yang mengalami kerusakan.
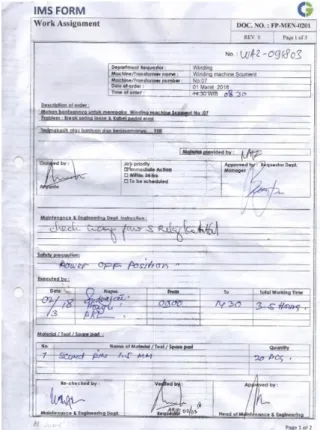
Gambar 11 Form Work Assignment
Komunikasi antar departemen ini biasanya akan dilakukan dengan membuat form WA ( Work Assignment ) yang berisikan detail kerusakan dari mesin winding. Pihak yang dapat melakukan pelaporan ini dapat dilakukan oleh operator mesin winding, foreman winding pada shift tersebut, dan juga dapat dilakukan oleh staff winding.
Gambar 12 Form Maintenance Record Setelah teknisi melaksanan tugasnya untuk memperbaiki mesin winding kemudian dibuat form Maintenance Record. Form ini dibuat untuk dapat mendata kerusakan yang pernah terjadi dan solusi yang pernah diberikan pada mesin tersebut untuk dapat kembali normal. Untuk waktu mendatang form ini dapat digunakan sebagai acuan dalam Departemen Maintenance and Engineering dalam memperbaiki mesin tersebut bila terjadi kerusakan di waktu yang akan datang.
KESIMPULAN
Perbaikan pada mesin winding yang rusak adalah upaya untuk
meningkatkan atau menjaga produktifitas dari mesin tersebut agar dapat kembali berproduksi setelah berhenti berproduksi karena adanya kerusakan.
Waktu yang digunakan untuk perbaikan sebuah mesin winding tergantung kerusakan yang dialami oleh mesin tersebut, semakin banyak dan semakin kompleks kerusakan yang dialami maka waktu perbaikannya semakin lama.
Beberapa spare part pada mesin winding yang digunakan pada mesin winding Hedrich Schumann tidak disediakan oleh perusahaan karena mesin ini merupakan mesin yang didesain dengan desain yang lama sehingga spare partnya tidak banyak dijumpai di pasar.
Kerusakan yang berat pada inverter dan motor listrik yang tidak dapat diperbaiki secara internal oleh teknisi Divisi Maintenance and Engineering dan akan dikerjakan oleh vendor lain yang mempunyai kerja sama dengan PT CG Power Systems.
Perlunya pengadaan spare part yang memadai dan lengkap untuk setiap komponen yang berhubungan dengan mesin winding agar dapat digunakan ketika perbaikan mesin winding memerlukan spare part baru.
PUSTAKA ACUAN
MH Badarudin, “Motor Listrik”. Bab II TInjauan Pustaka, Eprint Politeknik Sriwijaya, 2015
“Understanding Variable Speed Drives”,
[Online] Available :
https://www.maintenance.org/fileSend Action/fcType/0/fcOid/3995909429626 77366/filePointer/39959094296478860 7/fodoid/399590942964788605/drives.
pdf [Diakses] 30 Juni 2018
“Variable Frequency Drives Theory, Application, and Troubleshooting”
[Online] Available :
https://www.maintenance.org/fileSend Action/fcType/0/fcOid/3995909429626 77366/filePointer/39959094296478860
7/fodoid/399590942964788605/drives.
pdf [Diakses] 30 Juni 2018
“Rumus menghitung Torsi, Kecepatan dan Daya Motor listrik serta hubungannya”
[Online] Available :
https://duniaberbagiilmuuntuksemua.bl ogspot.com/2017/08/rumus-
menghitung-torsi-kecepatan-dan-daya- motor-listrik-serta-apa-
hubungannya.html [Diakses] 30 Juni
“Innovative Solutions for Automation”2018
[Online] Available :
https://stevenengineering.com/Tech_S upport/PDFs/46_SENSORS-
GENERAL-SPECS.pdf [Diakses] 30 Juni 2018
PENYEIMBANGAN BEBAN TRAFO DISTRIBUSI SATU FASA GUNA PENGURANGAN ARUS NETRAL RAYON
MAGELANG KOTA
Suriani ,Yulianus Wahyo Setiyono
Departeme Teknik Elekto Dan Informatika, Sekolah Vokasi, Universitas Gadjah Mada,Yogyakarta
Email: [email protected], [email protected]
ABSTRAK: Salah satu peralatan yang berperan penting di PT. PLN (Persero) Distribusi Jawa Tengah dan Daerah Istimewa Yogyakarta adalah trafo distribusi satu Fasa, dimana trafo ini berfungsi untuk menurunkan tegangan menengah 11,5 kV menjadi tegangan rendah 220 V yang digunakan oleh konsumen. Pembagian beban trafo awalnya merata, akan tetapi karena ketidakserempakan penyalaan beban- beban, pembongkaran dan penyambungan baru yang tidak termonitor menimbulkan ketidakseimbangan beban yang berdampak pada keandalan kerja trafo.
Ketidakseimbangan beban pada trafo distribusi satu Fasa nantinya akan menimbulkan berbagai dampak yang mengurangi umur pakai trafo.
Ketidakseimbangan beban juga mengakibatkan arus mengalir pada penghantar netral dan menimbulkan rugi-rugi yang nantinya akan merugikan PLN. Salah satu upaya mengurangi arus pada penghantar netral adalah dengan penyeimbangan beban trafo antara jurusan X1 dan X2 melalui pemindahan SR (Sambungan Rumah).
Hal ini mampu menekan persentase ketidakseimbangan beban trafo yang berdampak terhadap penurunan arus netral, rugi-rugi daya, dan penyelamatan energi.
Kata kunci: Ms.Excel, proteksi, recloser, selection, setting, WSOS 5.
ABSTRACT: One of the important equipments in PT. PLN (Persero) Distribusi Jawa Tengah dan Daerah Istimewa Yogyakarta is single phase distribution transformer, where this transformer serves to lower the medium voltage 11.5 kV into low voltage 220 V who used by consumers. The distribution of the transformer load was evenly distributed, but due to the insufficiency ignition of the loads, unconnected and new connection that unmonitored caused imbalance loads that affected the reliability of the transformer work. Imbalancing load on single phase distribution transformers will cause various impacts that reduce the lifetime the transformer. The imbalance load also results the current flowing in the neutral conductor and causing losses that will harm PLN. One effort to reduce the current in the neutral conductor is by balancing the transformer load between X1 and X2 by the SR (Home Connections) switch. It is capable to compress percentage imbalancing load of transformer that impact to decrease the neutral currents, power losses, and energy saving.
Keywords: neutral currents, losses, energy saving, load balancing.
PENDAHULUAN
Dalam pemenuhan kebutuhan tenaga listrik tersebut, PLN dituntut untuk profesional dalam melayani kebutuhan masyarakat. Penyediaan tenaga listrik yang stabil dan kontinyu merupakan syarat mutlak yang harus dipenuhi dalam memenuhi kebutuhan listrik masyarakat. Sepanjang proses penyaluran tenaga listrik mulai dari pembangkitan hingga sampai ke konsumen, bagian distribusi mempunyai peranan yang cukup penting karena bagian distribusi terhubung langsung dengan konsumen.
Sistem Tenaga Listrik merupakan kumpulan atau gabungan dari komponen-komponen atau alat- alat listrik seperti generator, transformator, saluran transmisi, saluran distribusi dan beban yang saling berhubungan dan merupakan satu kesatuan sehingga membentuk suatu sistem yang tujuannya berupa penyampaian tenaga listrik dari pusat pembangkitan tenaga listrik sampai ke konsumen-konsumen sesuai kebutuhan.
Gambar 1 Sistem Tenaga Listrik Sistem distribusi tenaga listrik merupakan salah satu bagian dari suatu sistem tenaga listrik yang dimulai dari outgoing Gardu Induk sampai dengan Alat Penghitung dan
Pembatas (APP) di instalasi konsumen yang berfungsi untuk menyalurkan dan mendistribusikan tenaga listrik dari Gardu Induk sebagai pusat beban ke pelanggan-pelanggan secara langsung atau melalui gardu-gardu distribusi (gardu trafo) dengan mutu yang memadai sesuai standar pelayanan yang berlaku.
Dilihat dari tegangannya sistem distribusi pada saat ini dapat dibedakan dalam 2 macam yaitu jaringan distribusi primer dan sekunder.
Gambar 2 Single Line Diagram Sistem Tenaga Listrik
Terdapat tiga pola utama sistem distribusi 20 kV yang telah ada dan berkembang di Pulau Jawa yaitu : 1. Sistem pentanahan netral dengan
tahanan tinggi di PLN Distribusi Jawa Timur.
2. Sistem pentanahan netral langsung sepanjang jaringan di PLN DistribusiJateng dan DIY.
3. Sistem pentanahan netral dengan tahanan rendah yang berlaku di PLN Distribusi Jawa Barat dan PLN Distribusi DKI Jakarta.
Dilihat dari pengawatannya dapat dipisahkan menjadi 2 macam yaitu:
1. Sistem distribusi 20 kV fasa tiga 3 kawat terdapat pada sistem distribusi 20 kV dengan pentanahan netral tinggi dan pada sistem distribusi 20 kV dengan pentanahan netral rendah;
2. Sistem distribusi 20 kV fasa tiga 4 kawat terdapat pada sistem distribusi 20 kV dengan netral pentanahan langsung. Sistem distribusi tenaga listrik di daerah
Jawa Tengah dan DIY
menggunakan Sistem Distribusi 20 kV tiga fasa – empat kawat dengan pentanahan netral langsung (multi grounded common neutral) sesuai dengan SPLN 12:1978.
Jaringan distribusi sekunder
Konfigurasi sistem jaringan tegangan rendah sesuai dengan spesifikasi JTR dalam SPLN 72 –1987 menggunakan konfigurasi sistem radial meskipun secara teoritis pasokan JTR dapat dilakukan dari beberapa sumber tegangan dalam hal trafo distribusi seperti konfigurasi sistem spot net work (simpul), namun demi keamanan personal dan keselamatan umum kondisi seperti ini tidak dipergunakan.
Apabila medan magnet berubah- ubah terhadap waktu, akibat arus bolak balik yang berbentuk sinusoid, suatu medan listrik akan dibangkitkan atau diinduksikan. Hubungan ini dinyatakan dalam Hukum Faraday (Zuhal,2010):
= Ndødt (2.1)
Keterangan :
= gaya gerak listrik (ggl) [volt]
N = jumlah lilitan
dø
dt = Perubahan Fluks Magnet
Gambar 3 Konstruksi Utama Trafo Sedangkan menurut konstruksinya, jenis transformator dapat dibedakan menjadi dua yaitu :
Tipe inti ini dibentuk dari lapisan besi berisolasi berbentuk persegi dan kumparan transformatornya dibelitkan mengelilingi inti pada dua sisi persegi
dan kontruksi dari intinya berbentuk huruf L atau huruf U.
Gambar 4 Trafo Tipe Inti
Gambar 5 Konstruksi Lempengan Logam Inti Trafo Bentuk L dan U
Tipe cangkang dibentuk dari lapisan inti berisolasi dan kumparan dibelitkan di pusat inti. Pada transformator ini, kumparan atau belitan transformator dikelilingi oleh inti dan kontruksi intinya berbentuk huruf E, huruf I, dan huruf F.
Gambar 6 Trafo Tipe Cangkang
Gambar 7 Konstruksi Lempengan Logam Inti Trafo Bentuk E, I dan F
Fungsi trafo antara lain adalah sebagai berikut :
a. Memindahkan daya listrik b. Sebagai penaik tegangan listrik c. Sebagai penurun tegangan listrik d. Memisahkan rangkaian
e. Dalam bidang tenga listrik pemakaian transformator dikelompokkan menjadi:
transformator daya, distribusi dan pengukuran
Trafo tanpa beban adalah ketika kumparan primer suatu transformator dihubungkan dengan tegangan sesaat V1 yang sinusoidal, dan kumparan sekundernya merupakan rangkaian yang tidak dibebani (no load). Maka akan mengalir arus primer Io yang sinusoidal dan dengan menganggap belitan N1 reaktif murni, Io akan tertingagal 900 dari V1 (Induktif).
Gambar 8 Trafo Tanpa Beban dan Vektornya
Keterangan :
N = Jumlah lilitan primer E = Gaya gerak listrik primer N = Jumlah lilitan sekunder E = Gaya gerak listrik sekunder V = Tegangan Masukan
Φ = Fluks Magnet I = Arus Primer
Arus primer I menimbulkan fluks (Φ) yang sefasa juga berbentuk sinusoidal dalam rangkaian magnetik.
Φ = Φmaks sin ωt (2.2) Fluks yang sinusoid ini akan menghasilkan tegangan sesaat dalam kumparan primer induksi berdasar Hukum Faraday
dλ
dt N dødt (2.3)
Dimana :
λ = gandengan fluks dalam kumparan primer.
Φ = fluks (disini dianggap semua terkurung didalam inti).
N1 =jumlah lilitan dalam kumparan primer
Dengan mengabaikan rugi tahanan dan adanya fluks bocor, maka :
E E
N
N (2.4)
= Perbandingan transformasi Jika,
< 1 = Transformator berfungsi menaikan tegangan (Step Up Transformer)
> 1 = Transformator berfngsi menurunkan tegangan (Step Down Transformer)
Dalam hal ini tegangan induksi E1 mempunyai kebesaran yang sama tetapi berlawanan arah dengan tegangan sumber V1. Apabila kumparan sekunder dihubungkan dengan beban Zl, I2 mengalir pada kumparan sekunder dimana I dengan 2 = faktor kerja beban. Arus beban I2 ini akan menimbulkan gaya gerak magnet (ggm) N2I2 yang cenderung menentang fluks (Ф) bersama yang telah ada akibat arus pemagnetan IM.
Agar fluks bersama itu tidak berubah nilainya, pada kumparan primer harus mengalir arus I’2, yang menentang fluks yang dibangkitkan oleh arus beban I2.
Gambar 9 Trafo Berbeban Hingga keseluruhan arus yang mengalir pada kumparan primer menjadi :
I = I + I' (Ampere) (2.5)
Bila rugi besi diabaikan ( Ic diabaikan ) maka I = IM
I = IM + I' (Ampere) (2.6) Karena nilai IM dianggap kecil maka :
I = I' (2.7)
Jadi :
N I = I N atau II NN (2.8) Dimana :
I = arus pada sisi primer Ic = arus rugi-rugi inti
I = arus pada sisi sekunder N = jumlah lilitan dalam kumparan
primer
I = arus penguat
N = jumlah lilitan dalam kumparan sekunder
IM = arus pemagnetan
Gambar 10 Rugi-Rugi pada Transformator
Transformator dengan pengaman sendiri (completely self protected) adalah transformator yang dilengkapi dengan pengaman beban lebih, arus hubung singkat dan tegangan surja petir dalam suatu kesatuan transformator.
Arus netral pada sistem distribusi merupakan arus yang mengalir pada penghantar netral pada sistem tiga fasa empat kawat.
Rugi-rugi atau yang biasa disebut dengan losses adalah perbedaan antara energi listrik yang disalurkan (Ps) dengan energi listrik yang terpakai (Pp)
Losses yang timbul pada sistem distribusi disebabkan oleh dua faktor yaitu faktor teknis dan nonteknis.
Dimana faktor teknis lebih menjurus ke masalah jaringan, sedangkan faktor nonteknis karena ketidakserempakan pencatatan pemakaian atau dalam penghitungan kWh.
METODA
Gambar 11 Metode Penyeimbangan Beban Trafo Distribusi Satu Fasa
1. Tahap pertama untuk
penyeimbangan beban trafo dimulai dari pengukuran beban trafo di masing- masing jurusan X1, X2, dan X0 untuk melihat besar arus netral yang mengalir.
2. Kemudian beban trafo di masing- masing jurusan dihitung selisihnya untuk kemudian dilakukan pemindahan beban dari jurusan yang bebannya lebih besar ke jurusan yang bebannya lebih kecil.
3. Penyeimbangan beban trafo dilakukan dengan memindahkan SR (Sambungan Rumah) dengan dasar perhitungan beban trafo yang lebih besar.
4. Pengukuran beban kembali setelah diseimbangkan bertujuan untuk melihat beban di masing- masing jurusan, apakah sudah mendekati seimbang atau belum.
5. Langkah terakhir adalah menganalisa beban trafo di masing-masing jurusan.
Tabel 1 Beban Trafo Sebelum Penyeimbangan
HASIL DAN PEMBAHASAN
Penghantar kawat netral yang digunakan oleh lima buah trafo pada penyulang SGN 03 PT. PLN (Persero) Rayon Magelang Kota menggunakan penghantar AAAC (All Aluminium Alloyed Conductor) dan TIC (Twisted Insulated Cable). Penghantar TIC yang digunakan luas penampangnya adalah 50 mm2 dan 70 mm2, sedangkan untuk penghantar AAAC yang digunakan luas penampangnya 50mm2, 70 mm2, dan 95 mm2. Maka nilai resistansi dari kelima trafo distribusi satu Fasa pada penyulang SGN 03 dapat dilihat pada Tabel 2 sebagai berikut:
Tabel 2 Resistansi Penghantar Netral Trafo
Persentase ketidakseimbangan beban trafo sebelum penyeimbangan beban akan menjadi salah satu acuan untuk melihat berapa besar ketidakseimbangan beban antar jurusan pada trafo satu Fasa.
Tabel 3 Persentase
Ketidakseimbangan Beban Trafo Sebelum Penyeimbangan
Dari Tabel 3 diatas dapat dilihat bahwa kelima trafo tersebut persen ketidakseimbangannya diatas 20%, maka perencanaan tindak lanjut terhadap trafo tersebut bisa berupa penyeimbangan beban terhadap jurusan X1 dan X2
Tabel 4 Penyeimbangan Beban
Dari Tabel 4 diatas dapat dilihat rugi-rugi energi total dalam satu hari adalah 15,639 kWh atau jika dikonversi ke dalam rupiah dengan tarif rata-rata adalah Rp. 1.352/kWh
Energi yang diselamtkan merupakan selisih nilai kWh sebelum penyeimbangan dan setelah penyeimbangan beban trafo dilakukan.
Berikut jumlah energi yang diselamatkan:
Tabel 5 kWh Terselamatkan
Dari Tabel 5 diatas dapat dilihat sebelum penyeimbangan rugi-rugi energi sebesar 15,539 kWh/hari dan 466,17 kWh/bulan, sedangkan setelah penyeimbangan rugi-rugi energi adalah sebesar 3,340 kWh/hari dan 100,20 kWh/bulan.
Tabel 6 Rupiah Terselamatkan
Dari Tabel 6 diatas dapat dilihat sebelum penyeimbangan rugi-rugi energi jika dikonversi dalam Rupiah sebesar Rp. 21.008/hari dan Rp.
630.261/bulan. Sedangkan setelah penyeimbangan rugi-rugi energi jika dikonversi dalam Rupiah adalah sebesar Rp. 4.515/hari dan Rp.
135.470/bulan.
KESIMPULAN
Ketidakseimbangan beban trafo distribusi satu fasa dapat diturunkan dengan melakukan penyeimbangan beban trafo melalui pemindahan SR
(Sambungan Rumah).
Penyeimbangan beban trafo satu fasa dapat mengurangi arus yang mengalir pada penghantar netral JTR (Jaringan Tegangan Rendah), dengan
menurunnya persentase
ketidakseimbangan beban antar jurusan X1 dan X2 maka arus pada penghantar netral X0 dapat berkurang.
Setiap petugas pemasangan baru sebaiknya membawa alat ukut dan melakukan pengukuran beban terlebih dahulu di pangkal JTR atau di masing-masing jurusan keluaran trafo sebelum melakukan penyambungan baru untuk menentukan titik sambung SR pada jurusan X1 atau X2 agar mencegah ketidakseimbangan beban trafo.
PUSTAKA ACUAN
PT. PLN (Persero). 2007. Sistem Distribusi Tenaga Listrik PT. PLN (Persero). Jakarta: Pusat Pendidikan dan Pelatihan.
PT. PLN (Persero). 2007. Teori Transformator Distribusi PT. PLN (Persero). Jakarta: Jasa Pendidikan dan Pelatihan.
PT. PLN (Persero). 2008. Konstruksi Gardu dan Transformator Distribusi PT. PLN (Persero).
Jakarta: Jasa Pendidikan dan Pelatihan.
PT. PLN (Persero). 2009. Teknik Listrik Terapan PT. PLN (Persero). Jakarta: Pusat Pendidikan dan Pelatihan.
PT. PLN (Persero). 2010. Sistem Tenaga Listrik PT. PLN (Persero).
Jakarta: Pusat Pendidikan dan Pelatihan.
PT. PLN (Persero). 2010. Teknik Listrik Terapan PT. PLN (Persero). Jakarta: Pusat Pendidikan dan Pelatihan.
PT. PLN (Persero). 2013. Perhitungan Losses PT. PLN (Persero).
Jakarta: Jasa Pendidikan dan Pelatihan.
SETTING RECLOSER MENGGUNAKAN APLIKASI WSOS 5 DAN MICROSOFT EXCEL PADA PENYULANG JAJAR 4 PT. PLN
AREA SURAKARTA
Ismail Yasyid, Maun Budiyanto, Y. Wahyo S.
Program Studi Diploma Teknologi Listrik, Departemen Teknik Elekto Dan Informatika, Sekolah Vokasi, Universitas Gadjah Mada
Email: [email protected], [email protected], [email protected]
ABSTRAK: Sistem proteksi pada Jaringan Tegangan Menengah (JTM) memiliki beberapa perangkat salah satunya adalah recloser. Pada penyulang jajar 4 terdapat recloser yang belum bekerja secara optimal. Oleh karena itu perlu pengaturan atau setting recloser agar berfungsi dengan baik. Untuk melakukan setting recloser terlebih dahulu melakukan perhitungan terhadap arus setting OCR dan GFR menggunakan hitungan manual dan simulasi Ms. Excel. Hasil dari perhitungan digunakan sebagai acuan untuk melakukan setting pada recloser menggunakan aplikasi WSOS 5. Hasil dari setting recloser jajar 4 menggunakan WSOS diperoleh besar arus setting OCR 400A, arus setting OCR 120 A, setting OCR instan 2508 A (5,7 x) dan setting GFR instan 1410 A (9,4x). Dengan hasil setting tersebut recloser dapat bekerja dengan baik dan dapat mengurangi section padam saat terjadi gangguan.
Kata kunci: Ms.Excel, proteksi, recloser, selection, setting, WSOS 5.
ABSTRACT: Protection system on Medium Voltage Network has several devices one of which is recloser. In Penyulang Jajar 4 there is a recloser that has not worked optimally. Therefore need setting or setting recloser to function properly. To perform the recloser setting first do the calculation of current settings OCR and GFR using manual count and simulation Ms. Excel. The result of the calculation is used as a reference for setting the recloser using WSOS 5. The result of the recloser setting of row 4 using WSOS is obtained by OCR 400A setting current, OCR 120 A setting, OCR instant 2508 A (5.7 x) and setting instant GFR 1410 A (9.4x). With the results of these settings the recloser can work properly and can reduce the section off during interruption.
Keywords: Ms.Excel, proteksi, recloser, selection, setting, WSOS 5.
PENDAHULUAN
Sistem distribusi merupakan bagian dari sistem ketenagalistrikan yang
paling dekat dengan
beban/pelanggan, yang menyalurkan tenaga listrik melalui kabel konduktor dengan menggunakan tegangan 20 kV
pada Jaringan Tegangan Menengah (JTM) serta tegangan 220 / 380 V pada jaringan Tegangan Rendah (JTR). Sebagian besar jaringan distribusi 20 kV di Indonesia menggunakan Saluran Udara Tegangan Menengah (SUTM) yang melintasi udara terbuka.
Dengan digunakannya sistem saluran tebuka menyebabkan kemungkinan gangguan hubung singkat semakin besar, yang disebabkan oleh pepohonan ataupun hewan yang berkeliaran pada jaringan.
Mengatasi kemungkinan gangguan tersebut maka dibuat sistem proteksi untuk menghindari gangguan 3 fasa, 2 fasa, maupun gangguan fasa dengan tanah.
Peralatan proteksi yang digunakan untuk mengamankan gangguan 3 fasa dan 2 fasa adalah relai arus lebih (OCR), sedangkan untuk mengamankan gangguan fasa tanah menggunakan relai gangguan tanah (GFR). Kedua relai tersebut dipasang sedemikian rupa pada peralatan yang disebut recloser. Peralatan proteksi ini akan membantu menghilangkan gangguan dan mempersempit area gangguan, sehingga tercipta sistem tenaga listrik yang handal.
Secara garis besar Sistem Tenaga Listrik dibagi menjadi tiga bagian utama, yaitu Sistem Pembangkitan, Sistem Penyaluran (Transmisi & Gardu Induk), dan Sistem Distribusi. Sistem Distribusi merupakan bagian akhir dari rangkaian komponen pada sistem tenaga listrik yang disajikan pada gambar 1.
Gambar 1. Sistem Tenaga Listrik
Sistem distribusi tenaga listrik merupakan rangkaian bagian- bagian komponen listrik yang tergabung satu sama lain mulai dari sisi sekunder (tegangan menengah) di Gardu Induk hingga sisi tegangan rendah. Sistem ini berfungsi mendistribusikan atau menyalurkan tenaga listrik ke pelanggan. Sistem distribusi dibagi menjadi 3 bagian yaitu :
1. Sistem distribusi tegangan menengah mempunyai tegangan kerja di atas 1 kV dan setinggi- tingginya 35 kV. Jaringan distribusi tegangan menengah berawal dari Gardu Induk / Pusat Listrik pada sistem terpisah/isolated. Pada beberapa tempat berawal dari pembangkit listrik. Bentuk jaringan dapat berbentuk radial atau tertutup (radial open loop).
2. Gardu distribusi tenaga listrik adalah suatu bangunan gardu listrik yang berisi atau terdiri dari instalasi.
Perlengkapan Hubung Bagi Tegangan Menengah (PHB- TM), transformator tegangan rendah (PHB-TR), untuk memasok kebutuhan tenaga listrik bagi para pelanggan baik dengan tegangan menengah (TM 20 kV) maupun tegangan rendah (TR 220/380V).
3. Jaringan distribusi tegangan rendah adalah bagian hilir dari suatu sistem tenaga listrik. Melalui jaringan distribusi ini disalurkan tenaga listrik kepada para pelanggan listrik.
Recloser artinya menutup kembali, digunakan untuk mengamankan peralatan listrik/jaringan saluran udara tegangan menengah (SUTM) bila terjadi gangguan hubung singkat temporer/sementara atau permanen (Wahyudi, 2012:206).
Dalam sistem tenaga listrik jaringan distribusi recloser disebut sebagai penutup balik otomatis yang pada dasarnya merupakan pemutus
tenaga yang dilengkapi dengan peralatan kontrol. Peralatan ini dapat merasakan ketika jaringan terdapat gangguan dan memerintah pemutus tenaga untuk membuka kemudian menutup kembali atau membuka seterusnya tergantung pada jenis gangguan yang diterima sistem. Fungsi dari recloser atau PBO adalah untuk menormalkan dan mengurangi waktu padam saat terjadi gangguan. Dapat mengurangi waktu padam karena sesuai cara kerja recloser yang dapat menutup kembali saat terjadi gangguan temporer. Sistem tenaga listrik tegangan menengah yang tidak memiliki recloser akan mengalami pemadaman tetap saat terjadi gangguan meskipun gangguan bersifat temporer.
Aplikasi WSOS 5 (Windows Swithchgear Operating System 5) adalah paket perangkat lunak yang diterbitkan oleh Schneider.
Perangkat lunak ini memungkinkan kendali jarak jauh dan pemantauan recloser dan saklar pemecah beban/sectionalisers. Dengan perangkat lunak WSOS para operator dapat melakukan tugas- tugas seperti menganalisa sejarah peristiwa dari masing-masing perangkat untuk mengembangkan strategi pemeliharaan yang akan datang, memperoleh informasi untuk pengoptimalan sistem dan
mengubah pengaturan
perlindungan dan memeriksa status perangkat saat ini dilapangan dari PC.
METODE
Penyulang Jajar 4 disuplai dari gardu induk jajar. Penyulang ini dikelola oleh Rayon Kota Surakarta, daerah penyulang ini dimulai dari PMT T4 hingga LBS NO 8/B4-N.
Dalam single line diagram seperti gambar 2 :
Gambar 2. Single line diagram Penyulang jajar 4 hanya memilikiJJR4 satu buah recloser karena kondisi panjang jaringan yang pendek yaitu 6,4 kms. Dengan panjang jaringan 6,4 kms kondisi ini tidak memenuhi syarat untuk sistem proteksi dengan jumlah recloser lebih dari satu. Syarat jarak ideal untuk letak recloser kedua adalah 7 kms dari recloser pertama. Letak recloser pertama yang dipasang pada penyulang jajar 4 adalah 2,4 kms, jarak ini merupakan jarak ideal untuk backup proteksi PMT pada gardu induk. Sedangkan untuk backup recloser dan mengurangi daerah padam saat terjadi gangguan dipasang sebuah LBS NC yang dipasang pada jarak 4,8 kms pada jaringan. Recloser akan disesuaikan dengan karakteristik jaringan seperti besar beban, jarak penyulang, dan data yang lain.
Dalam pengaturan atau setting recloser menggunakan aplikasi pendukung yaitu WSOS dan Ms.
Excel. WSOS merupakan aplikasi yang akan terhubung dengan bagian port USB pada panel kontrol recloser yang berfungsi untuk mengatur nilai OCR, GFR, waktu trip, dll. Sedangkan Ms. Excel digunakan untuk perhitungan nilai yang diperlukan dalam aplikasi WSOS.
HASIL DAN PEMBAHASAN
Perhitungan menggunakan Ms.
Excel yang dapat mempermudah operator dalam menghitung dan melakukan setting recloser. Pada Gambar 3 merupakan hasil perhitungan menggunakan Ms.
Excel dan gambar kurva relai OCR dan GFR pada sistem proteksi Penyulang Jajar 4:
Gambar 3. Kurva Hubungan OCR PMT dengan OCR Reclose
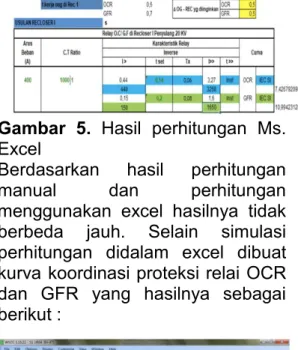
Gambar 5. Hasil perhitungan Ms.
Excel
Berdasarkan hasil perhitungan manual dan perhitungan menggunakan excel hasilnya tidak berbeda jauh. Selain simulasi perhitungan didalam excel dibuat kurva koordinasi proteksi relai OCR dan GFR yang hasilnya sebagai berikut :
Ga mb ar
4 . Kurva Hubungan GFR PMT dengan GFR Recloser
Kurva diatas menunjukan koordinasi yang baik dan dapat diterapkan pada sistem proteksi Penyulang Jajar 4. Karena antara kurva PMT dengan recloser tidak terjadi perpotongan. Ketika terjadi perpotongan antara garis kurva maka akan terjadi kegagalan proteksi karena peralatan bekerja tidak sesuai urutan yang diinginkan.
Hasil perhitungan yang didapatkan tidak menjadi nilai mutlak untuk dimasukan dalam setting. Karena harus disesuaikan dengan keadaan jaringan dilapangan.
Gambar 6. Global setting Angka 400 pada kolom setting current phase merupakan arus beban saat terjadi pelimpahan pada jaringan. Arus beban maksimal yang dimasukan karena meghindari setting ulang saat terjadi pelimpahan beban. Sehingga ketika memasukkan arus beban maksimal cukup sekali pengaturan yang dilakukan.
Sequence reset time merupakan waktu yang diperlukan untuk reset yang berlangsung secara berurutan, reset time ini dapat dikatakan sebagai waktu reset untuk recloser.
Sedangkan trip to loguot merupakan jumlah reclose yang dapat dilakukan oleh recloser.
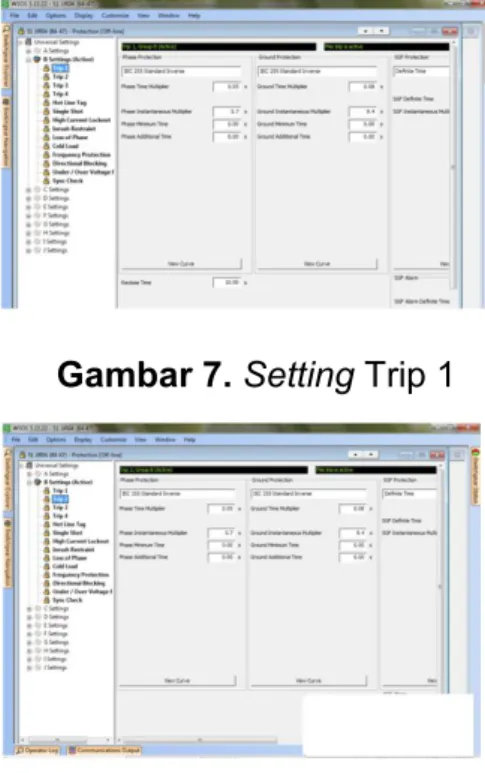
Gambar 7. Setting Trip 1
Gambar 8. Setting Trip 2
Pada setting trip 1 dan trip 2 komponen yang diatur adalah sama, yaitu TMS OCR, TMS GFR, Iset inst OCR, dan Iset inst GFR. Nilai dari setting diatas mengacu pada perhitungan sebelumnya. Pada trip 1 terdapat kolom reclose time yang memiliki nilai 10,00 detik yang berarti ketika ada gangguan temporer pertama yang melebihi Iset maka dibutuhkan waktu 10 detik untuk menutup balik (reclose). Ketika gangguan pertama dapat dinetralisir namun disusul gangguan kedua, maka yang bekerja adalah pada setting trip 2.
Gambar 9. High Current Logout Cara kerja dari single shot adalah ketika trip 1 bekerja dan
reclose time habis namun saat fault reset time belum selesai menghitung terjadi gangguan kedua maka yang bekerja bukan trip 2 tetapi single shot. Ketika single shot bekerja maka recloser akan trip dan tidak dapat reclose (logout).
Gambar 10. Setting High Current Logout
Gambar diatas menunjukan bahwa pada saat terjadi gangguan dengan arus minimal 2700 A maka recloser akan trip. Untuk nilai arus logout diatur besarnya tidak melebihi besar arus setting outgoing PMT dan diatas arus OCR instan. Gambar 4.1 merupakan gambar sistem koordinasi pada penyulang jajar 4. Recloser terletak pada tiang JJR04-0047 yang berjarak 2,4 kms dari gardu induk.
Proteksi pada PMT gardu induk dibackup oleh recloser, tugas dari recloser ini adalah menetralisir atau menghilangkan gangguan agar tidak sampai hingga PMT. Selain itu untuk mengurangi section padam pada penyulang.
Recloser jajar 4 memiliki daerah kerja dari tiang JJR04-0047 hingga ujung. Ketika terjadi gangguan pada wilayah tersebut maka recloser akan bekerja dan mengamankan zona pertama dari gangguan. Dengan tidak padamnya zona pertama atau dari PMT hingga recloser maka section padam pada penyulang dapat berkurang.
KESIMPULAN
1. Dari hasil perhitungan manual
dan hasil simulasi
menggunakan Ms. Excel diperoleh Tset OCR adalah 0,14 detik, Tset GFR adalah 0,2 detik, dan besar Iset inst OCR adalah 7,4x dan Iset inst GFR adalah 8,09x.
2. Kurva OCR dan kurva GFR berdasarkan simulasi menggunakan Ms. Excel, proteksi yang diusulkan bekerja dengan baik, karena kurva PMT dengan recloser tidak bersentuhan.
3. Pengaturan atau setting recloser menggunakan WSOS
mengacu pada hasil
perhitungan dengan
disesuaikan pada kondisi jaringan, dengan hasil penyesuaian setting OCR instat 2508 A (5,7 x) dan setting GFR instan 1410 A (9,4x).
4. Recloser dapat bekerja dengan baik sehingga ketika ada gangguan dari PMT hingga recloser atau tiang JJR04-0047 tidak padam, sehingga dapat mengurangi section padam.
5. Pengoptimalan kerja recloser disetiap penyulang dengan pemeriksaan secara rutin baik setting maupun keadaan fisik dari recloser agar berfungsi dengan baik dan dapat menekan nilai SAIDI/SAIFI.
6. Saat melakukan penyetingan recloser harus disesuaikan dengan keadaan lapangan dan tidak langsung menjadikan hasil hitungan sebagai setting, hal tersebut berujuan agar recloser dapat bekerja dengan baik.
PUSTAKA ACUAN
Sarimun, Wahyudi, 2012, Proteksi Sistem Distribusi Tenaga Listrik, Depok : Garamond.
Schenieder, ADVC N-Series Installation Manual R03 Press, Schneider PT PLN (Persero). 2010. Buku 5 : Standar Konstruksi Jaringan Tegangan
Menengah Tenaga Listrik. Jakarta : PT
PLN (Persero).
PT PLN (Persero). 1983. SPLN No.
52 - 3 : 1983 tentang Pola Pengaman Sistem
bagian tiga : Sistem Distribusi 6 kV dan 20 kV Jakarta : PT PLN (Persero).
PT PLN (Persero). 2013. Sistem Tenaga Listrik. Semarang : PLN Corporate
University.
PT PLN (Persero). 2013. Perangkat Sistem Proteksi Distribusi.
Semarang : PLN
Corporate University.
PT PLN (Persero). 2013. Recloser dan Sectionalizer. Semarang : PLN Corporate
RANCANG BANGUN REMOTE CONTROL PENGENDALI PELAMPUNG JARAK JAUH DENGAN WIRELESS MODULE
TRANSCEIVER NRF24L01+PA+LNA
Dian Kusuma Jati, Maun Budiyanto
Departemen Teknik Elektro dan Informatika, Sekolah Vokasi, Universitas Gadjah Mada, Yogyakarta
Email: [email protected], [email protected]
ABSTRAK: PT. Stechoq Robotika Indonesia merupakan perusahaan yang meneliti , mengembangkan dan memproduksi robot yang bertujuan untuk pengembangan dalam bidang militer. Hingga saat ini telah banyak alat-alat yang telah diriset dan diproduksi seperti ROV, timbangan pintar, Smart Industry dan yang sedang dikerjakan saat ini adalah pelampung dengan kontrol jarak jauh. Salah satu hal yang penting dalam mendesain pelampung tersebut adalah pengendalinya. Dengan tujuan untuk memaksimalkan pengendalian dari pelampung dilakukan riset tentang remot dengan menggunakan modul NRF2401+PA+LNA. Modul ini sendiri merupakan modul komunikasi serial wireless yang menggunakan frekuensi 2,4 GHz.
Modul yang digunakan telah dilengkapi dengan sirkuit Low Noise Amplifier (LNA) dan Power Amplifier (PA) sehingga dapat mentransmisikan data hingga 1100 meter.
Dengan menggunakan modul ini yang didesain sebuah remot pengendali pelampung jarak jauh guna memaksimalkan range ata jangakauan yang dapat dijangkau oleh pelampung. Remot yang dibuat menggunakan Arduino Nano sebagai mikrokontroler dan joystick sebagai parameter pengendalian.
Kata kunci : NRF24L01, komunikasi, Low Noise Amplifier
ABSTRACT: PT. Stechoq Robotika Indonesia is the company that research , develop, and produce robot for developing military sector. There are many instruments have been researched and produced like as ROV, smart balancing, smart Industry and recently remote control for life vest. Controlling is the most important for life vest designed. Objectively for designing of life vest get optimal had been conducted research for remoting using NRF2401+PA+LNA module. It is communication serial wireless module with frequency 2.4 GHz. It had been featured Low Noise Amplifier (LNA) circuit and Power Amplifier (PA) that can transmit data for 1100 meters. The module that have been designed for life vest remote control to get range optimally. Microcontroller and joystick is parameter with Arduino Nano for controlling.
Keywords : NRF24L01, communication, Low Noise Amplifier
PENDAHULUAN
Dalam dunia militer, SAR maupun kegiatan yang berhubungan dengan dunia kelautan, pelampung
menjadi alat yang penting dan diwajibkan keberadaannya. Pada kapal-kapal militer, komersil, pengangkut dan kapal yang lain sering
dijumpai keberadaaan pelampung yang selalu ada disisi luar kapal sebagai piranti pengaman. Begitu pentingnya keberadaan pelampung sehingga keberadaannya diwajibkan dalam dunia kelautan. Dalam hal ini PT. Stechoq Robotika Indonesia membuat sebuah inovasi yaitu dengan kontrol jarak jauh yang dinamakan Rush Safe. Inovasi terhadap pelampung dalam wujud pengendalian jarak jauh dianggap perlu dilakukan mengingat selama ini penggunaan dari pelampung sendiri masih dialkukan secara manual dan memakan waktu.
Perumusan masalah dalam penelitian hal ini adalah pembuatan alat yang ditujukan untuk riset guna mempertimangkan metode dan komponen yang tepat untuk mengontrol pelampung jarak jauh, keterbatasan pengiriman dan penerimaan data, dan keterbatasan desain dengan referensi alat serupa yang sudah ada. Oleh karena itu tujuan dalam penelitian ini adalah pembuatan remot kontrol pengendali pelampung jarak jauh dengan modul NRF24L01+PA+LNA, pembuatan perbandingan dengan sistem pengendali jarak jauh serupa yang menggunakan perangkat lain, dan pemahaman konsep mengenai pengendalian pelampung dengan kendali jarak jauh secara keseluruhan.
Ada beberapa komponen penyusun untuk rancang bangun pengendali pelampung jarak jauh seperti Aduino Nano yang merupakan mikrokontroler dengan keeping utama yaitu ATMega328.
Gambar 1 Arduino Nano
Seperti Gambar 1 , Arduino Nano memiliki 30 pin input/output digital ( 6 pin diantaranya dapat digunakan sebagai output PWM ), 7 input analog (ADC), 1 UART ( port komunikasi serial ), 1 port komunikasi serial I2C, osilator crystal 16 MHz, colokan DC, port USB dan tombol reset. Untuk memulai mengoperasikannya dapat menghubungkan sumber DC 5V pada pin Vin yang digunakan untuk memasok daya pada Arduino.
Komponen utama yang lainnya adalah modul NRF24L01+PA+LNA yang merupakan sebuah modul transceiver nirkabel dengan frekuensi 2.4GHz yang merupakan produksi terbaru
seperti pada Gambar 2.
Gambar 2 Modul NRF24L01+PA+LNA
Modul ini dapat digunakan untuk berkomunikasi secara wireless dengan jarak 1,1 km sesuai datasheet. Dalam penggunaannya modul ini bekerja sebagai transmitter (pengirim) dan receiver (penerima). Dalam seri NRF24L01 modul ini dilengkapi
dengan antena yang sudah tertanam dengan range komunikasi kurang lebih
25 meter. Dalam seri
NRF24L01+PA+LNA dilengkapi dengan antena eksternal sebagai penguat gelombang sinyal sehingga mampu berkomunikasi dengan jarak maksimal 1,1 km. Untuk regulator dalam switching digunakan IC LM2596 seperti Gambar 3.
Gambar 3 IC LM2596
Regulator seri LM 2596 adalah IC monolitik yang menyediakan fungsi aktif untuk regulator switching step- down (buck) dengan kemampuan driving beban sebesar 3A dengan pengaturan saluran beban yang baik.
LM2596 memiliki tegangan output tetap 3,3V , 5V, 12V , dan keluaran yang dapat disesuaikan atau adjustable. LM2596 beroperasi pada frekuensi switching 150kHz , hal ini memungkinkan komponen filter berukuran lebih kecil dari yang diperlukan dengan regulator switching frekuensi lebih rendah.
METODE
Skema yang ditunjukkan oleh Gambar 4 merupakan sistem kerja dari alat secara keseluruhan. Skema dibagi menjadi dua yaitu sisi kiri merupakan bagian dari transmitter dan sisi kanan merupakan bagian dari receiver.
Gambar 4 Alur kerja alat
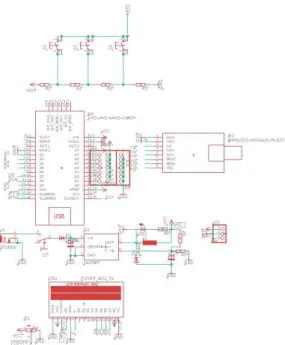
Pada sisi transmitter suplai dari rangkaian didapatkna dari baterai Li- Po 3 cell 12 Volt. Tegangan dari baterai akan diturunkan atau step- down oleh IC LM2596 menjadi 5 Volt untuk mensuplai Arduino Nano dan joystick. Untuk suplai NRF24L01 tegangan diturunkan menjadi 3,3 Volt oleh AMS3117. Hal ini dikarenakan NRF24L01 sendiri bekerja pada tegangan 3,3 Volt. Joystick sendiri akan memberikan data berupa analog yang akan mewakili sumbu x, y, dan z sesua dengan perubahan toggle. Data sumbu tersebut dibaca oleh Arduino Nano dan memerintahkannya ke NRF24L01 untuk mengirimkan data ke receiver. Pada perancangan elektronis terdapat dua board yang dirancang yaitu rangkaian transmitter dan rangkaian receiver. Gambar 6 merupakan rangkaian sistem minimum dari transmitter remot.
Gambar 5 Rangkaian Transmitter Dalam rangkaian transmitter Arduino Nano akan memerintahkan NRF24101 untuk mengirim data ke bagian rechiever. Dalam hal tersebut Arduino Nano memiliki protocol komunikasi dengan NRF24101 yaitu dengan komunikasi SPI(Serial Pheriperal Interface) dengan menghubungkan pin pada Arduino
Nano dan NRF24101 yang
bersesuaian.
Gambar 6 Rangkaian Receiver Rangkaian diatas merupakan rangkaian yang digunakan untuk receiver atau penerima. Komponen yang digunakan oleh rangkaian transmitter dan rechiever kurang lebih
sama yaitu menggunakan Arduino sebagai microcontroller. Akan tetapi pada sistem minimum terdapat port keluaran pada pin PWM (Pulse Width Modulation) sebagai keluaran untuk mengatur kecepatan motor. Pada rangkaian ini NRF24101 bersifat sebagai penerima dan Arduino akan mengirimkan perintah kepada motor untuk mengarahkan pelampung.
Perancangan mekanis dibuat seminimal mungkin dan senyaman mungkin ketika digunakan. Hal ini karena remot sendiri akan digenggam oleh driver dan menuntut kenyamanan ketika digunakan. Dalam mendesain mekanis digunakan software SolidWorks. Seperti pada Gambar 7, untuk implementasi mekanis sendiri menggunakan kayu triplek sebagai bahan utama mekanisnya. Hal ini dikarenakan teksturnya yang nyaman untuk dipegang dan ringan. Selain itu kayu juga lebih murah dibandingkan dengan akrilik atau bahan lain.
Gambar 7 Desain Mekanis Perancangan program terdapat dua bagian yaitu program pada