1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Masalah estimasi variabel keadaan pada sistem dinamik sangat penting. Dalam kehidupan sehari-hari banyak muncul masalah estimasi, misalnya estimasi ketinggian pasang surut air laut, estimasi ketinggian gelombang air laut, estimasi pada masalah navigasi satelit, estimasi distribusi konduksi panas, estimasi besarnya getaran yang terjadi karena letusan gunung. Estimasi ini perlu dilakukan karena tidak semua besaran-besaran pada sistem tersebut dapat diukur secara langsung. Misalnya, pada masalah estimasi ketinggian dan kecepatan aliran air sungai, tidak mungkin untuk menempatkan alat ukur di sepanjang sungai untuk mengukur ketinggian maupun kecepatan arus sungai tersebut.
Estimasi merupakan metode untuk menaksir nilai kuantitas yang tidak diketahui dari data yang tersedia. Oleh karena itu, estimasi ini sangat perlu dilakukan karena tidak semua variabel keadaan pada sistem dapat diukur secara langsung. Dalam kasus seperti ini, diperlukan adanya sistem pembantu yang disebut observer (Olsder, 1994). Estimasi variabel keadaan pada sistem dapat dilakukan dengan banyak metode berdasarkan dari bentuk sistem yang diamati.
Pada umumnya, sistem dapat dibagi menjadi dua: sistem deterministik dan sistem stokastik. Sistem deterministik adalah sistem yang tidak memuat derau. Estimasi variabel keadaan pada sistem deterministik dilakukan menggunakan
observer. Pada kondisi riil, pada umumnya suatu sistem dipengaruhi oleh faktor derau sistem dan derau pengukuran. Derau yang mempengaruhi sistem disebut sebagai derau sistem (system noise), sedangkan derau yang mempengaruhi pengukuran disebut derau pengukuran (measurement noise). Derau sistem dan derau pengukuran ini merupakan besaran-besaran stokastik dengan kovariansi tertentu. Sistem yang memuat derau sistem dan derau pengukuran ini disebut sebagai sistem stokastik. Estimasi pada sistem dinamik stokastik dilakukan menggunakan filter Kalman (Kwakernaak dan Sivan, 1972).
Filter Kalman adalah algoritma rekursif untuk mengestimasi variabel keadaan dari sistem dinamik stokastik. Estimasi variabel keadaan dengan filter Kalman dilakukan dengan cara memprediksi variabel keadaan berdasarkan dinamika sistem dan data pengukuran (Lewis, 1992).
Dalam aplikasinya, penerapan filter Kalman masih banyak terdapat kelemahan. Kelemahan yang kadang terjadi adalah munculnya nilai eigen dari matriks kovariansi yang negatif, sehingga akan menyebabkan suatu kondisi yang disebut dengan ill-condition. Kondisi seperti ini bisa terjadi karena faktor perhitungan secara komputasi atau karena pemodelan sistem yang kurang akurat (Maybeck, 1979). Oleh karena itu, modifikasi algoritma filter Kalman sangat diperlukan untuk mengatasi masalah yang terjadi pada saat penerapannya.
Kelemahan filter Kalman yang berupa munculnya nilai eigen matriks kovariansi yang negatif tersebut telah diatasi dengan cara membentuk matriks kovariansi kesalahan estimasi dalam bentuk akar kuadrat. Algoritma ini dikenal dengan nama algoritma Filter Kovariansi Akar Kuadrat. Algoritma Filter Kovariansi Akar Kuadrat lebih stabil secara numerik daripada filter Kalman biasa. Pada algoritma Filter Kovariansi Akar Kuadrat, ukuran matriks yang terbentuk menjadi semakin besar. Oleh karena itu, algoritma Filter Kovariansi Akar Kuadrat memerlukan waktu komputasi yang lebih lama jika dibandingkan dengan algoritma filter Kalman biasa (Anderson, 1979).
Pada masalah aplikasi, dimana filter Kalman maupun Filter Kovariansi Akar Kuadrat biasa diterapkan, pada umumnya merupakan sistem yang berukuran besar. Pada sistem yang berukuran besar, algoritma Filter Kovariansi Akar Kuadrat membutuhkan waktu komputasi yang lebih lama daripada algoritma filter Kalman. Oleh karena itu, beberapa peneliti melakukan modifikasi untuk mengatasi ukuran matriks yang besar karena ditulis dalam bentuk akar kuadrat. Verlaan dan Heemink (1997) melakukan modifikasi pada algoritma Filter Kovariansi Akar Kuadrat dengan melakukan reduksi rank matriks kovariansinya. Sedangkan Apriliani (2001) melakukan modifikasi pada algoritma Filter Informasi Akar Kuadrat dengan melakukan reduksi rank matriks informasinya.
bahwa masalah akurasi dan waktu komputasi menjadi fokus utama. Masalah waktu komputasi sangat dipengaruhi oleh besarnya ukuran sistem. Semakin besar ukuran sistem, maka semakin besar pula waktu komputasi yang dibutuhkan. Oleh karena itu, di dalam aplikasi sangat diperlukan untuk menyederhanakan suatu sistem menjadi lebih sederhana tanpa kesalahan yang signifikan. Sistem sederhana ini mempunyai ukuran yang lebih kecil daripada sistem semula. Proses untuk mendapatkan sistem tereduksi disebut dengan reduksi model (Grigoriadis, 1995).
Teknik reduksi model telah menjadi area riset yang sangat aktif diteliti dalam dekade terakhir. Berbagai metode reduksi model yang banyak berkembang saat ini diantaranya adalah metode Pemotongan Setimbang (Moore, 1981; Skogestad, 2001; Weiland, 2009; Bemporad, 2011), aproksimasi Norma Hankel (Glover, 1984; Green dan Limebeer, 1995) dan Aproksimasi Perturbasi Singular (Fernando dan Nicholson, 1982; Muscato dkk, 1997).
Diantara metode reduksi model tersebut, metode Pemotongan Setimbang adalah metode reduksi model yang paling sederhana dan menghasilkan sistem tereduksi yang stabil serta mempertahankan sifat-sifat sistem semula, terutama sifat kestabilan, keteramatan dan keterkendalian (Zhou, 1996). Oleh karena itu, pada penelitian ini digunakan metode Pemotongan Setimbang untuk melakukan reduksi model.
Dalam perkembangan selanjutnya, untuk mempercepat waktu komputasi, maka modifikasi algoritma filter Kalman mulai dikembangkan dengan menggunakan konsep reduksi. Modifikasi filter Kalman dengan menggunakan reduksi diantaranya telah dilakukan oleh Darouach (2000), Farrel (2001), Hetoit (2002), Konieg (2003), Simon (2007), dan Liu (2014).
Berdasarkan hasil penulusuran kajian literatur tersebut, maka pada penelitian ini difokuskan pada proses pembentukan filter Kalman pada sistem tereduksi yang diturunkan melalui kolaborasi antara sifat-sifat yang muncul pada saat proses reduksi model dengan metode estimasi filter Kalman. Dari hasil penelitian yang ada, belum terlihat modifikasi yang berupa pembentukan filter Kalman tereduksi dilakukan melalui tahapan pembentukan algoritma filter Kalman pada sistem setimbangnya terlebih dahulu dan selanjutnya digabungkan
dengan sifat-sifat yang berlaku pada proses reduksi model dengan metode Pemotongan Setimbang.
Oleh karena itu, perlu dikaji bagaimana pembentukan algoritma filter Kalman pada sistem setimbang. Pembentukan algoritma filter Kalman pada sistem setimbang ini diharapkan supaya informasi atau sifat-sifat sistem semula tidak hilang pada saat proses estimasi. Selanjutnya, algoritma Filter Kalman pada sistem tereduksi dapat dibentuk dengan jalan menerapkan sifat-sifat reduksi model ke dalam algoritma filter Kalman pada sistem setimbang yang telah terbentuk.
1.2 Perumusan Masalah
Berdasarkan pada uraian latar belakang yang telah dikemukakan, maka permasalahan dalam penelitian ini adalah:
1. Bagaimana prosedur pembentukan algoritma filter Kalman pada sistem setimbang?
2. Bagaimana prosedur pembentukan algoritma filter Kalman pada sistem tereduksi?
3. Bagaimana syarat eksistensi estimator yang dihasilkan dari algoritma filter Kalman pada sistem tereduksi?
4. Bagaimana implementasi algoritma filter Kalman tereduksi yang telah dihasilkan tersebut pada masalah terapan?
1.3 Batasan Penelitian
Misalkan akan dilakukan estimasi variabel keadaan dari sistem dinamik stokastik linear waktu diskrit yang dinyatakan oleh persamaan
, dengan persamaan pengukuran
, dengan
∈ adalah variabel keadaan pada waktu ,
∈ adalah vektor masukan deterministik pada waktu , ∈ adalah vektor pengukuran pada waktu ,
∈ adalah derau sistem pada waktu dan merupakan besaran stokastik yang mempunyai kovariansi ,
∈ adalah derau pengukuran pada waktu dan merupakan besaran stokastik yang mempunyai kovariansi ,
, , , adalah matriks-matriks konstan dengan ukuran yang bersesuaian.
Di dalam penelitian ini digunakan asumsi-asumsi sebagai berikut:
1. Derau sistem maupun derau pengukuran merupakan derau putih (white noise) dengan rata-rata nol dan kovariansi masing-masing adalah dan . 2. Matriks dan merupakan matriks simetri dan definit positif.
3. Keadaan sistem awal adalah vektor acak yang tidak berkorelasi dengan derau sistem maupun derau pengukuran .
4. Keadaan sistem awal diasumsikan mempunyai rata-rata ̅ dan kovariansi awal atau dapat ditulis ~ ̅ , dengan diasumsikan sebagai matriks simetris dan definit positif.
5. Sistem yang dibahas adalah sistem linier diskrit yang stabil, teramati dan terkendali.
6. Masalah riil yang diambil pada studi kasus adalah masalah distribusi konduksi panas.
1.4 Tujuan Penelitian
Secara umum, penelitian ini bertujuan untuk memperluas pengembangan algoritma filter Kalman untuk meningkatkan akurasi hasil estimasi dan memperkecil waktu komputasi. Secara terperinci tujuan penelitian ini adalah: 1. Mengkonstruksi algoritma filter Kalman pada sistem setimbang.
2. Mengkonstruksi algoritma filter Kalman pada sistem tereduksi.
3. Mengkaji syarat eksistensi dan kestabilan filter Kalman pada sistem tereduksi. 4. Mengimplementasikan algoritma filter Kalman pada sistem tereduksi yang
1.5 Kontribusi Penelitian
Penelitian ini menghasilkan modifikasi algoritma filter Kalman, terutama untuk sistem berukuran besar. Modifikasi yang dihasilkan berupa algoritma filter Kalman pada sistem tereduksi. Algoritma filter Kalman pada sistem tereduksi ini merupakan kolaborasi antara metode reduksi model dengan metode estimasi. Algoritma filter Kalman pada sistem tereduksi diharapkan dapat memberikan hasil estimasi variabel keadaan sistem yang lebih akurat dan waktu komputasi yang lebih singkat.
Adapun secara rinci, kontribusi atau hasil penelitian di dalam disertasi ini adalah:
1. Algoritma filter Kalman pada sistem diskrit telah berhasil dikembangkan untuk sistem setimbang. Proses estimasi dalam algoritma Filter Kalman pada sistem setimbang dilakukan dengan cara yang identik dengan estimasi variabel keadaan sistem diskrit menggunakan filter Kalman. Hal ini disajikan pada Subbab 3.1. Hasil kajian ini telah dipublikasikan Proceedings International Conference on Mathematics, Statistics and Its Applications 2012, 19-21 Nopember 2012, dengan judul “Implementation of the Algorithm Kalman Filter on Reduction Model”.
2. Telah diselidiki dan dibuktikan sifat realisasi minimum yang berlaku pada sistem tereduksi yang telah diperoleh dengan menggunakan metode Pemotongan Setimbang. Pembuktian sifat realisasi minimum sistem tereduksi dari sistem diskrit ini identik dengan pembuktian realisasi minimum sistem tereduksi dari sistem kontinu. Hal ini dibahas pada Subbab 3.2.
3. Telah diperoleh konstruksi algoritma filter Kalman pada sistem tereduksi. Algoritma filter Kalman pada sistem tereduksi ini diperoleh dengan mengkolaborasikan langkah-langkah algoritma filter Kalman pada sistem setimbang dengan sifat-sifat yang berlaku pada proses pembentukan sistem tereduksi. Hasil ini telah disajikan pada Subbab 3.3. Hasil dari kajian pada poin 2 dan 3 ini telah dipublikasikan dalam International Journal Control and
Automation (IJCA), Vol 7. No.9, pp 257-270, tahun 2014, dengan judul “Construction of the Kalman Filter Algorithm on the Model Reduction”.
4. Sistem setimbang dari sistem diskrit deterministik telah diperumum untuk sistem diskrit stokastik. Perumuman ini dilakukan dengan melibatkan adanya faktor stokastik pada sistem setimbang yang berupa derau sistem dan derau pengukuran. Sistem setimbang yang melibatkan derau sistem dan derau pengukuran disebut sebagai sistem setimbang stokastik. Dalam hal ini telah berhasil diperoleh syarat keterkendalian dan ketaramatan untuk sistem setimbang yang stokastik. Syarat kestabilan, keterkendalian dan ketaramatan sistem setimbang stokastik ini yang menjamin eksistensi estimator pada sistem tereduksi. Selanjutnya telah diselidiki sifat stabilitas dan konvergensi algoritma filter Kalman pada model tereduksi. Hasil-hasil ini disajikan pada Subbab 3.4.
5. Berdasarkan proses estimasi dalam algoritma filter Kalman pada sistem tereduksi, dapat ditunjukkan bahwa estimasi variabel keadaan pada sistem hanya tergantung pada estimasi sebagian variabel keadaan yang mempunyai pengaruh besar terhadap sistem. Oleh karena itu, jika ditinjau dari aspek efisiensi komputasi, maka estimasi variabel keadaan pada algoritma filter Kalman pada sistem tereduksi mempunyai waktu komputasi yang lebih kecil daripada filter Kalman biasa.
6. Telah dilakukan simulasi penerapan algoritma filter Kalman pada sistem tereduksi dalam masalah estimasi distribusi konduksi panas. Masalah distribusi konduksi panas ini merupakan salah satu contoh kasus untuk sistem yang berukuran besar. Kajian numerik tersebut dilakukan untuk menguji efektifitas algoritma filter Kalman sistem tereduksi yang telah berhasil dikembangkan. Secara numerik telah diverifikasi bahwa estimasi variabel keadaan dengan menggunakan filter Kalman sistem tereduksi mempunyai hasil estimasi yang lebih akurat dan waktu komputasi yang lebih kecil daripada hasil estimasi yang diperoleh dengan menggunakan filter Kalman pada sistem semula. Hasil pembahasan ini diberikan pada Bab 4.
1.6 Tinjauan Pustaka
Pada beberapa sistem, tidak semua variabel keadaan dari sistem dapat diamati secara langsung dari hasil pengukuran. Hal ini mungkin disebabkan karena mahalnya biaya untuk mengamati seluruh variabel yang ada atau karena tidak mungkin untuk dapat mengukur semua variabel tersebut secara langsung. Oleh karena itu, pada kasus seperti ini diperlukan sistem pembantu yang disebut
observer. Observer digunakan untuk mengestimasi variabel keadaan yang tidak dapat diamati secara langsung (Olsder, 1994).
Pada sistem kontrol dikenal adanya observer deterministik dan observer
stokastik. Observer deterministik digunakan untuk mengestimasi variabel keadaan dari sistem dinamik deterministik. Sedangkan observer stokastik, yang disebut dengan filter Kalman, digunakan untuk mengestimasi variabel keadaan dari sistem dinamik stokastik (Kwakernaak, 1972; Lewis 1986, 1992).
Filter Kalman pertama kali diperkenalkan oleh Rudolph E. Kalman pada tahun 1960. Filter Kalman merupakan metode estimasi variabel keadaan sistem dinamik stokastik dengan cara meminimumkan kovariansi kesalahan estimasi. Pada algoritma filter Kalman, pertama dilakukan estimasi variabel keadaan berdasarkan dinamika sistemnya dan selanjutnya dilakukan koreksi berdasarkan data pengukuran yang ada. Estimasi variabel keadaan berdasarkan dinamika sistemnya disebut tahap prediksi, sedangkan tahap koreksi hasil estimasi berdasarkan data pengukuran disebut tahap koreksi. Tahap koreksi dilakukan untuk memperbaiki hasil estimasi variabel keadaan yang diperoleh dari tahap prediksi. Tahap prediksi dan tahap koreksi dilakukan secara rekursif dengan cara meminimumkan kovariansi kesalahan estimasi. Oleh karena itu, secara umum algoritma filter Kalman dapat dibagi ke dalam 4 bagian. Bagian pertama dan kedua memberikan model sistem dan model pengukuran serta nilai awal, sedangkan bagian ketiga dan keempat adalah tahap prediksi dan tahap koreksi (Lewis, 1986).
Pada metode estimasi variabel keadaan, terdapat dua algoritma pemfilteran dasar: filter Kalman dan filter Informasi. Filter Kalman digunakan jika pada sistem tersedia data informasi tentang variabel keadaan awal dan kovariansi
kesalahan estimasi awal. Sedangkan filter Informasi digunakan jika tidak tersedia informasi tentang variabel keadaan awal (Anderson, 1979). Pada penelitian ini, metode yang akan dikembangkan adalah filer Kalman, sehingga perlu diberikan informasi tentang variabel keadaan awal dan kovariansi kesalahan estimasi awal.
Pada perkembangannya, di dalam penerapan filter Kalman terdapat beberapa kelemahan yang dapat menurunkan kinerja filter Kalman. Kelemahan pada penerapan filter Kalman tersebut dapat terjadi karena adanya masalah ill-condition atau karena masalah pemodelan sistem (Maybeck, 1979). Masalah ill-condition, yaitu kondisi di mana nilai eigen dari matriks kovariansinya negatif, dapat terjadi karena faktor pengukuran yang kurang tepat atau karena adanya pembulatan pada saat komputasi. Meskipun secara teoritis matriks kovariansi tidak mungkin mempunyai nilai eigen negatif, tetapi pada penerapannya masalah ini dapat terjadi, misalnya karena pengukuran yang sangat akurat atau karena pembulatan pada saat komputasi. Kondisi seperti ini dapat menyebabkan hasil estimasi dengan filter Kalman menjadi tidak akurat.
Untuk mengatasi hal tersebut, Verhaegen (1986) menyarankan untuk menuliskan matriks kovariansi kesalahan estimasi pada tahap prediksi maupun pada tahap koreksi dalam bentuk perkalian akar kuadrat. Algoritma ini dikenal dengan nama algoritma Filter Kovariansi Akar Kuadrat (Anderson, 1979; Verhaegen 1986). Sedangkan modifikasi pada algoritma Filter Informasi dilakukan dengan menuliskan matriks informasi dalam bentuk akar kuadrat dan menghasilkan suatu algoritma Filter Informasi Akar Kuadrat (Bierman, 1977). Algoritma Filter Kovariansi Akar Kuadrat dan algoritma Filter Informasi Akar Kuadrat merupakan algoritma filter yang lebih stabil secara numerik, tetapi algoritma-algoritma ini memerlukan waktu komputasi yang lebih besar jika dibandingkan dengan algoritma filter Kalman atau filter Informasi.
Masalah terapan biasanya merupakan sistem yang berukuran besar. Hal ini disebabkan karena sistem tersebut diperoleh dari hasil diskritisasi persamaan differensial parsial. Penerapan algoritma filter Kalman maupun algoritma Filter Kovariansi Akar Kuadrat pada sistem yang berukuran besar membutuhkan waktu komputasi yang cukup besar dan sering terjadi ill-conditioned pada matriks
kovariansi kesalahan estimasi. Untuk mengatasi masalah tersebut, Verlaan (1997) dan Apriliani (2001) mengusulkan untuk mendekati matriks kovariansi kesalahan estimasi atau matriks informasi dengan suatu matriks tertentu yang mempunyai rank jauh lebih kecil. Algoritma-algoritma yang dihasilkan oleh Verlaan (1997) dan Apriliani (2001) ini telah berhasil mengurangi waktu komputasi dari algoritma Filter Kovariansi Akar Kuadrat dan Filter Informasi Akar Kuadrat.
Sementara itu, para peneliti juga telah melakukan modifikasi terhadap sistem yang berukuran besar, yaitu dengan cara membentuk sistem yang lebih sederhana tanpa kesalahan yang signifikan. Sistem pengganti yang lebih sederhana ini selalu diinginkan dalam setiap aplikasi karena mempunyai ukuran yang lebih kecil daripada sistem semula dan masih mempertahankan sifat-sifat sistem semula. Sistem pengganti ini biasa dikenal dengan sistem tereduksi. Waktu komputasi pada sistem tereduksi lebih kecil daripada waktu komputasi pada sistem semula. Modifikasi untuk mengganti sistem yang berukuran besar dengan sistem yang lebih sederhana tanpa kesalahan yang signifikan disebut dengan reduksi model (Grigoriadis, 1995).
Terdapat banyak metode reduksi model, diantaranya adalah metode Pemotongan Setimbang (Moore, 1981; Skogestad, 2001; Weiland, 2009; Bemporad, 2011), aproksimasi Norma Hankel (Glover, 1984; Green dan Limebeer, 1995) dan Aproksimasi Perturbasi Singular (Fernando dan Nicholson, 1982; Muscato dkk, 1997). Diantara metode reduksi model tersebut, metode Pemotongan Setimbang merupakan metode reduksi model yang paling sederhana. Metode Pemotongan Setimbang dilakukan dengan cara membentuk sistem setimbang melalui transformasi sistem awal. Metode Pemotongan Setimbang menjamin sifat-sifat dari sistem awal selalu dipertahankan. Sistem hasil reduksi dengan metode Pemotongan Setimbang akan mempunyai sifat yang sama dengan sifat sistem semula yaitu stabil, terkendali dan teramati. Setelah sistem setimbang terbentuk, selanjutnya dilakukan pemotongan terhadap variabel keadaan berdasarkan pengaruhnya terhadap sistem. Variabel keadaan yang mempunyai pengaruh besar terhadap sistem dipertahankan, sedangkan variabel keadaan yang mempunyai pengaruh kecil akan dipotong atau dibuang. Pengaruh variabel
keadaan terhadap sistem ini ditentukan berdasarkan nilai singular Hankel. Oleh karena itu, reduksi model yang dilakukan di dalam penelitian ini menggunakan metode Pemotongan Setimbang.
Sehubungan dengan perkembangan modifikasi algoritma filter Kalman dan metode ruduksi model, para peneliti mulai mengembangkan modifikasi metode filter Kalman dengan menggunakan reduksi model. Diantaranya adalah seperti yang telah dilakukan oleh Darouach (2000), Farrel (2001), Hetoit (2002), Konieg (2003), Simon (2007) dan Liu (2014).
Darouach (2000) menyajikan solusi sederhana masalah optimal filtering tereduksi untuk sistem linear yang berubah terhadap waktu. Pada penelitian tersebut, variabel keadaan yang diestimasi sudah ditentukan sejak awal, sehingga sistem yang diamati dapat dituliskan sebagai
, , ,
dengan adalah variabel keadaan pada waktu , adalah variabel pengukuran pada waktu dan sebagai variabel yang akan diestimasi. Selanjutnya, dengan menggunakan filter Kalman, dilakukan estimasi terhadap variabel yang mempunyai ukuran yang lebih kecil dari pada ukuran variabel . Akhirnya terbentuk filter tereduksi untuk mengestimasi variabel . Pada penelitian tersebut telah dihasilkan syarat eksistensi dan stabilitas dari filter tereduksi.
Selanjutnya Brian F. Farrel dan Petros J. Ioannou (2001) memberikan metode untuk menerapkan filter Kalman pada model pendekatan tereduksi dari sistem kesalahan. Hal ini dilakukan karena sistem kesalahan secara umum mempunyai ukuran yang lebih kecil daripada sistem sebenarnya. Sistem tereduksi dihasilkan dengan melakukan reduksi pada sistem kesalahan dengan menggunakan metode Pemotongan Setimbang. Selanjutnya dibangun filter Kalman tereduksi dari sistem tereduksi yang berasal dari sistem kesalahan tersebut. Filter Kalman tereduksi yang dihasilkan, diterapkan untuk identifikasi variabel keadaan dalam sistem badai quasigeostrophic. Akurasi identifikasi variabel keadaan dengan menggunakan filter Kalman tereduksi dinilai dengan
cara dibandingkan dengan keadaan sebenarnya. Algoritma filter Kalman tereduksi yang diperoleh dari sistem kesalahan tereduksi memberikan hasil yang cukup akurat jika dibandingkan dengan filter Kalman dari sistem kesalahan semula.
Beberapa studi telah menunjukkan efektivitas dari metode SEEK (singular evolutive extended Kalman) dan SEIK (Singular Evolutif Interpolated Kalman) dalam kapasitasnya untuk mengasimilasi data yang altimetrik ke dalam model laut. Namun, filter SEEK dan SEIK ini tetap mahal untuk asimilasi data pada operasional nyata. Selanjutnya, Hetoit (2002) mengembangkan bentuk terdegradasi dari SEIK. Pendekatan yang dilakukan Hetoit (2002) pada dasarnya menyederhanakan evolusi dasar koreksi pada SEIK, yang merupakan bagian yang paling mahal dari filter ini. Filter yang dikembangkan oleh Hetoit (2002) telah diterapkan dalam masalah pengaturan yang realistis dari model OPA atas zona Pasifik tropis dan hasilnya menunjukkan kinerja yang lebih cepat daripada SEIK.
Selanjutnya, Konieg (2003) menjelaskan sebuah formula filtering optimal yang diturunkan untuk sistem linear stokastik dengan input tidak diketahui. Pendekatan baru ini merupakan generalisasi dari Kalman Filter konvensional untuk sistem linear multivariabel stokastik dengan input yang tidak diketahui di bagian variabel keadaannya dan persamaan pengukurannya. Jadi pertama diberikan sistem yang berbentuk
, ,
dengan adalah variabel keadaan, adalah variabel input deterministik yang diasumsikan diketahui, adalah variabel input yang tidak diketahui dan adalah variabel output. Konieg (2003) bertujuan untuk memperoleh filter optimal tereduksi dari input yang tidak diketahui, yang telah dipisahkan dari sistem. Adapun langkah-langkah yang dilakukan adalah
Langkah 1: Filter diperoleh dengan mentransformasikan ke dalam bentuk dasar di mana ruang bagian dari variabel keadaan dan vektor output dipisahkan dari input yang tidak diketahui.
Langkah 2: Digunakan filter Kalman untuk mengestimasi sub-variabel keadaan linear dan selanjutnya dikembalikan ke bentuk asli untuk
mendapatkan estimasi linear optimal variabel keseluruhan.
Pendekatan baru ini merupakan generalisasi dari Kalman Filter konvensional untuk sistem linear stokastik multivariabel dengan kasus terdapat bagian input yang tidak diketahui pada persamaan variabel keadaan dan persamaan pengukurannya. Variabel keadaan dapat diestimasi dengan benar-benar independen terhadap input yang tidak diketahui dan filter yang dihasilkan memberikan variansi estimasi unbiased yang minimum. Filter Kalman dengan input tidak diketahui ini terbukti lebih efisien dari pada filter Kalman konvensional untuk kasus sistem dengan input yang tidak diketahui. Algoritma ini diterapkan pada masalah kemudi otomatis kendaraan.
Simon (2007) menyajikan metode filter Kalman tereduksi yang optimal yang dibentuk langsung dari sistem berukuran penuh. Filter order tereduksi diperoleh dengan meminimalkan trace dari kovariansi kesalahan estimasi. Filter tereduksi diturunkan berdasarkan sistem berukuran penuh. Semula diberikan sistem dinamik linear berukuran penuh:
̅ ̅ ̅ ,
̅ .
Selanjutnya, diberikan suatu transformasi linear ̅ yang secara aljabar menghasilkan sistem yang ekuivalen dengan ukuran yang lebih kecil daripada sistem semula. Sistem ekuivalen dapat dipartisi sedemikian rupa sehingga variabel yang akan diestimasi sudah terpisah dengan variabel yang tidak diestimasi, yaitu:
̅ ̅ ̅ ,
̅ ̅ ̅ ,
̅ ̅ ,
Akhirnya, dengan menggunakan filter Kalman, estimasi hanya dilakukan terhadap variabel yang ingin diestimasi saja.
Chandrasekar dan Bernstein (2007) mengkonstruksi filter tereduksi untuk sistem time-varying. Filter tereduksi dibentuk berdasarkan teknik optimasi horizon-terbatas (finite-horizon optimization) untuk sistem time-varying. Selanjutnya, Bin Liu (2014) membahas masalah filtering untuk variabel non linear
dalam sistem kontinu-diskrit, dimana dinamika sistem dimodelkan dengan persamaan diferensial stokastik, dan pengukuran gangguan sistem diperoleh pada kasus waktu diskrit. Jadi metode ini diperuntukkan untuk sistem non linear yang merupakan sistem kontinu-diskrit dan tidak ada proses reduksi model.
Berdasarkan kajian pustaka yang telah dilakukan, penulis melihat belum terdapat kajian tentang bagaimana pembentukan algoritma filter Kalman tereduksi melalui kolaborasi antara proses estimasi, dengan metode filter Kalman, dengan proses reduksi model, dengan Pemotongan Setimbang. Hal ini perlu dilakukan karena proses reduksi model dengan Pemotongan Setimbang akan menghasilkan pendekatan sistem yang mempertahankan sifat-sifat sistem semula, terutama tentang sifat kestabilan dan keteramatan.
Oleh karena itu, pembentukan filter Kalman tereduksi perlu diawali dengan pembentukan filter Kalman pada sistem setimbang dengan tujuan supaya sifat-sifat sistem semula dapat dipertahankan pada saat proses estimasi. Selanjutnya, dari algoritma filter Kalman pada sistem setimbang yang telah terbentuk, akan diberikan sifat-sifat reduksi model untuk mendapatkan filter Kalman tereduksi. Dalam penelitian ini, penulis melakukan penelitian tentang analisa dan pembentukan algoritma filter Kalman pada sistem tereduksi dengan jalan mengkonstruksi algoritma filter Kalman pada sistem setimbang dan menerapkan sifat-sifat reduksi model.
Pada kajian awal, penulis telah memulai kajian estimasi pada masalah distribusi konduksi panas. Penelitian tersebut, dituliskan dalam sebuah makalah yang berjudul Distribution Estimation of Heat Conduction using Kalman filtering which Implemented on Reduction Model dan telah dimuat di dalam Proceedings 3rd International Conference and Workshops on Basic and Applied Sciences, pada tanggal 19-21 September 2011 di Surabaya-Indonesia (Arif, D.K. at al, 2011). Pada makalah tersebut dilakukan estimasi distribusi konduksi panas pada kawat penghantar dengan menggunakan filter Kalman. Selanjutnya dilakukan reduksi model dari sistem konduksi panas dan kemudian menerapkan filter Kalman untuk melakukan estimasi distribusi panas. Metode ini diharapkan dapat memberikan
hasil estimasi yang lebih akurat dan membutuhkan waktu komputasi yang lebih cepat.
Adapun langkah-langkah yang dilakukan pada penelitian tersebut adalah sebagai berikut:
1. Membentuk pemodelan sistem ditribusi konduksi panas pada sebatang kawat. 2. Melakukan estimasi distribusi konduksi panas pada kawat penghantar dengan
menggunakan algoritma filter Kalman.
3. Melakukan reduksi model dari sistem konduksi panas dengan menggunakan metode Pemotongan Setimbang.
4. Menerapan metode filter Kalman pada model distribusi konduksi panas yang telah direduksi.
5. Melakukan analisa perbandingkan hasil estimasi yang diperoleh dari metode filter Kalman pada sistem awal dengan hasil estimasi yang diperoleh dari penerapan filter Kalman pada sistem hasil reduksi.
Dari hasil penelitian tersebut, dapat disimpulkan bahwa estimasi distribusi konduksi panas dengan filter Kalman yang diterapkan pada sistem awal dengan sistem tereduksinya mempunyai performansi yang hampir sama.
Hasil kajian awal yang telah dicapai, memotivasi penulis untuk melakukan penelitian lebih lanjut. Penelitian berikutnya adalah implementasi algoritma filter Kalman pada model tereduksi. Pada penelitian ini dilakukan kajian tentang proses reduksi model dengan metode Pemotongan Setimbang dan selanjutnya mengkonstruksi algoritma filter Kalman secara langsung dari sistem tereduksi yang terbentuk. Hasil Kajian tersebut, telah penulis sajikan dalam sebuah makalah yang berjudul Implementation of The Kalman Filter On Reduction Model dan telah dipublikasikan pada Proceedings International Conference on Mathematics, Statistics and Its Applications 2012, tanggal 19-21 Nopember 2012 di Bali-Indonesia (Arif, D.K. at al., 2012).
Selanjutnya, penelitian dilanjutkan dengan mengkostruksi algoritma filter Kalman pada sistem tereduksi dengan cara mengkolaborasikan antara metode reduksi model dengan metode estimasi filter Kalman. Modifikasi yang
dilakukan ini bertujuan untuk mendapatkan hasil estimasi yang akurat dan waktu komputasi yang kecil. Pada penelitian, penulis mengkonstruksi sebuah algoritma filter Kalman pada sistem tereduksi melalui kolaborasi antara sifat-sifat yang ada dalam pembentukan sistem tereduksi dengan estimasi variabel sistem setimbang.
Diawali dengan kajian tentang pembentukan sistem tereduksi dari sistem diskrit dinamik stokastik. Pembentukan sistem tereduksi ini dilakukan dengan menggunakan metode Pemotongan Setimbang. Selanjutnya, dilakukan estimasi variabel keadaan pada sistem setimbang dengan menggunakan filter Kalman. Akhirnya dihasilkan algoritma filter Kalman untuk sistem setimbang. Selanjutnya, pada algoritma filter Kalman untuk sistem setimbang, diberikan sifat-sifat yang berlaku pada proses pembentukan sistem tereduksi, sehingga dihasilkan algoritma filter Kalman untuk sistem tereduksi.
Pada algoritma filter Kalman untuk sistem tereduksi, estimasi variabel keadaan sistem hanya ditinjau berdasarkan pada estimasi bagian variabel keadaan yang mempunyai pengaruh besar terhadap sistem. Bagian variabel keadaan yang mempunyai pengaruh besar terhadap sistem ini adalah bagian variabel keadaan yang bersesuaian dengan nilai singular Hankel yang besar. Sehingga, proses perhitungan estimasi dengan algoritma filter Kalman pada sistem tereduksi jelas lebih cepat daripada estimasi algoritma filter Kalman pada sistem semula.
Konstruksi algoritma filter Kalman pada sistem tereduksi kemudian diimplementasikan pada masalah estimasi konduksi panas. Berdasarkan hasil implementasi, terlihat bahwa algoritma filter Kalman pada sistem tereduksi menghasilkan estimasi yang lebih akurat dan waktu komputasi yang lebih cepat daripada algoritma filter Kalman pada sistem semula. Hasil Kajian ini telah dituliskan dalam bentuk paper yang berjudul Construction of the Kalman Filter Algorithm on the Model Reduction dan telah terbit dalam International Journal Control and Automation (IJCA), Vol 7. No.9, pp 257-270, September 2014. (Arif, D.K. at al., 2014).
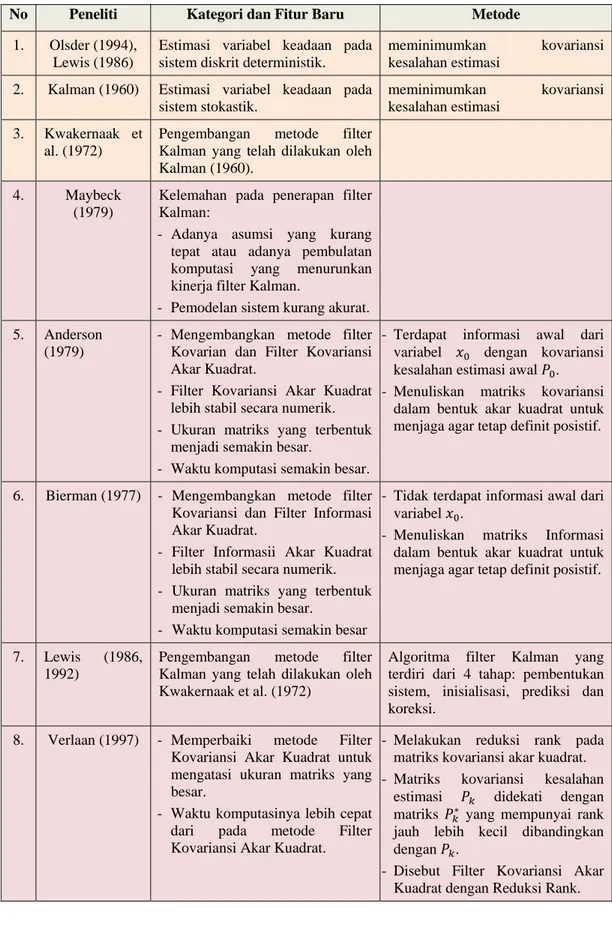
Berdasarkan uraian di atas, rangkuman hasil penelitian yang telah dikerjakan oleh peneliti dan penulis, terkait dengan modifikasi algoritma filter Kalman dan metode reduksi model, dapat disajikan dalam tabel berikut.
Tabel 1.1 Rangkuman hasil penelitian yang terkait dengan pengembangan modifikasi filter Kalman pada model tereduksi (state of the art penelitian) No Peneliti Kategori dan Fitur Baru Metode
1. Olsder (1994), Lewis (1986)
Estimasi variabel keadaan pada sistem diskrit deterministik.
meminimumkan kovariansi kesalahan estimasi
2. Kalman (1960) Estimasi variabel keadaan pada sistem stokastik.
meminimumkan kovariansi kesalahan estimasi
3. Kwakernaak et al. (1972)
Pengembangan metode filter Kalman yang telah dilakukan oleh Kalman (1960).
4. Maybeck (1979)
Kelemahan pada penerapan filter Kalman:
- Adanya asumsi yang kurang tepat atau adanya pembulatan komputasi yang menurunkan kinerja filter Kalman.
- Pemodelan sistem kurang akurat. 5. Anderson
(1979)
- Mengembangkan metode filter Kovarian dan Filter Kovariansi Akar Kuadrat.
- Filter Kovariansi Akar Kuadrat lebih stabil secara numerik. - Ukuran matriks yang terbentuk
menjadi semakin besar.
- Waktu komputasi semakin besar.
- Terdapat informasi awal dari variabel dengan kovariansi kesalahan estimasi awal .
- Menuliskan matriks kovariansi dalam bentuk akar kuadrat untuk menjaga agar tetap definit posistif.
6. Bierman (1977) - Mengembangkan metode filter Kovariansi dan Filter Informasi Akar Kuadrat.
- Filter Informasii Akar Kuadrat lebih stabil secara numerik. - Ukuran matriks yang terbentuk
menjadi semakin besar. - Waktu komputasi semakin besar
- Tidak terdapat informasi awal dari variabel .
- Menuliskan matriks Informasi dalam bentuk akar kuadrat untuk menjaga agar tetap definit posistif.
7. Lewis (1986, 1992)
Pengembangan metode filter Kalman yang telah dilakukan oleh Kwakernaak et al. (1972)
Algoritma filter Kalman yang terdiri dari 4 tahap: pembentukan sistem, inisialisasi, prediksi dan koreksi.
8. Verlaan (1997) - Memperbaiki metode Filter Kovariansi Akar Kuadrat untuk mengatasi ukuran matriks yang besar.
- Waktu komputasinya lebih cepat dari pada metode Filter Kovariansi Akar Kuadrat.
- Melakukan reduksi rank pada matriks kovariansi akar kuadrat. - Matriks kovariansi kesalahan
estimasi didekati dengan matriks ∗ yang mempunyai rank jauh lebih kecil dibandingkan dengan .
- Disebut Filter Kovariansi Akar Kuadrat dengan Reduksi Rank.
No Peneliti Kategori dan Fitur Baru Metode
9. Apriliani (2001) - Memperbaiki metode Filter Informasi Akar Kuadrat untuk mengatasi matriks yang besar. - Waktu komputasinya lebih cepat
dari pada metode Filter Informasi Akar Kuadrat.
- Melakukan reduksi rank pada matriks informasi akar kuadrat. - Dikenal sebagai metode Filter
Informasi Akar Kuadrat dengan Reduksi Rank.
10. Grigoriadis (1995)
- Sistem berukuran besar
memerlukan waktu komputasi yang cukup besar.
- Perlu adanya upaya untuk mengganti sistem yang berukuran besar dengan sistem yang lebih sederhana tanpa kesalahan yang signifikan.
Reduksi model
11. Skogestad (2001)
Mengenalkan metode Pemotongan Setimbang sebagai pengembangan dari metode reduksi model.
- Membentuk sistem setimbang. - Memotong variabel keadaan yang
bersesuaian dengan nilai singular Hankel yang kecil.
12. Weiland (2009) Mengembangkan metode
Pemotongan Setimbang dari Sigurd (2001).
- Memberikan syarat eksistensi sistem tereduksi.
- Memberikan aturan pemotongan dengan nilai singular Hankel dan norm Hankel.
13. Bemporad (2011)
Mengembangkan metode Pemotongan Setimbang.
Melengkapi dengan Program mathlab untuk reduksi model dengan metode Pemotongan Setimbang.
14. Darouach (2000)
- Mengembangkan filter tereduksi untuk sistem multi variabel. - Hanya menghasilkan estimasi
dari sebagian variabel yang sudah ditetapkan untuk diestimasi.
- Lebih efisien digunakan untuk sistem berukuran besar dan bagian variabel yang akan diestimasi sudah ditentukan terlebih dahulu.
- Mendefinisikan bentuk sistem yang memuat persamaan untuk bagian variabel keadaan yang akan diestimasi.
- Digunakan pendekatan matriks invers Moore-Penrose.
- Selanjutnya dibentuk filter untuk estimasi dengan filter Kalman terhadap bagian variabel yang sudah dipilih.
15. Farrel et al (2001)
Mengembangkan metode estimasi menggunakan filter Kalman tereduksi.
- Sistem yang diamati adalah sistem kesalahan dinamik.
- Dibentuk sistem tereduksi dari sistem kesalahan dinamik dengan metode Pemotongan Setimbang. - Dibangun filter Kalman pada
sistem tereduksi yang berasal dari sistem kesalahan dinamik.
16. Hetoit (2002) - Mengembangkan bentuk terdegradasi dari filter SEIK
menyederhanakan evolusi dasar koreksi pada SEIK, yang
No Peneliti Kategori dan Fitur Baru Metode
(Singular Evolutif Interpolated Kalman).
- Telah diterapkan dalam masalah pengaturan yang realistis dari model zona Pasifik tropis.
- Menunjukkan hasil kinerja yang lebih cepat dari metode SEIK.
merupakan bagian yang paling mahal dari filter ini.
17. Konieg (2003) Menjelaskan formula filtering optimal yang diturunkan untuk sistem linear stokastik dengan input tidak diketahui.
- Membentuk sistem linear multivariabel stokastik dengan input yang tidak diketahui di bagian persamaan state dan persamaan pengukurannya.
- Filter diperoleh dengan
mentransformasikan ke dalam bentuk dasar di mana ruang bagian dari vektor state dan vektor output dipisahkan dari input yang tidak diketahui sehingga diperoleh estimasi optimal dari sub state linear tersebut.
- Filter tereduksi yang telah terbentuk dikembalikan ke bentuk asli untuk mendapatkan estimasi optimal keseluruhan variabel. 18. Simon (2007) Menyajikan metode filter Kalman
tereduksi optimal yang dibentuk langsung dari sistem awal.
- Tidak membuat pendekatan model dan tidak mengasumsikan struktur khusus dalam sistem dinamik. - Dibuat suatu transformasi yang
menghasilkan sistem yang ekuivalen dengan sistem awal.
- Sistem hasil transformasi mempunyai bentuk yang sudah memisahkan antara variabel yang akan diestimasi dan variabel yang tidak akan diestimasi.
- Dilakukan estimasi dengan filter Kalman terhadap bagian variabel yang perlu diestimasi saja.
19. Liu (2014) Membahas masalah filtering untuk variabel non linear dalam sistem kontinu-diskrit, di mana dinamika sistem dimodelkan dengan persamaan diferensial stokastik, dan pengukuran gangguan sistem diperoleh pada kasus waktu diskrit. 17. Arif, D.K. et
al., (2011)
Menerapkan metode reduksi model dengan Pemotongan Setimbang pada masalah distribusi konduksi panas dan melakukan estimasi dengan menggunakan filter
- Estimasi distribusi konduksi panas pada kawat penghantar dengan menggunakan filter Kalman. - Reduksi model sistem konduksi
No Peneliti Kategori dan Fitur Baru Metode
Kalman. panas dengan Pemotongan
Setimbang.
- Estimasi model konduksi panas yang sudah direduksi dengan menggunakan filter Kalman. - Hasil estimasi filter Kalman pada
model yang sudah direduksi mempunyai performansi yang sama dengan estimasi dengan filter Kalman pada sistem semula. 18. Arif, D.K. et al
(2012)
Melakukan implementasi algoritma filter Kalman pada sistem tereduksi secara langsung dan mengimplementasikannya pada masalah distribusi konduksi panas.
- Reduksi model sistem diskrit stokastik dengan metode pemotongan setimbang.
- Penerapan secara langsung filter Kalman pada model tereduksi. - Implementasi pada konduksi
panas.
- Berdasarkan hasil simulasi diketahui bahwa posisi variabel keadaan pada sistem setimbang dan sistem semula adalah berbeda. 19. Arif, D.K. et al
(2014)
Mengkonstruksi algoritma filter Kalman pada sistem setimbang dan menkonstruksi algoritma filter Kalman pada sistem tereduksi melalui penerpan sifat-sifat reduksi model dengan Pemotongan Setimbang pada algoritma filter Kalman pada sistem setimbang.
- Konstruksi algoritma filter Kalman pada sistem setimbang. - Analisa sifat-sifat sistem
setimbang untuk menjamin kemungkinan diterapkannya algoritma filter Kalman.
- Penggabungan antara sifat-sifat yang berlaku pada proses reduksi model dengan algoritma filter Kalman pada sistem setimbang. - Diperoleh estimator linear terbaik
untuk sistem setimbang dan sistem tereduksi.
- Estimasi dan kovariansi kesalahan estimasi variabel keadaan pada sistem tereduksi hanya dipengaruhi oleh variabel keadaan yang mempunyai pengaruh besar terhadap sistem.
- Berdasarkan hasil simulasi pada konduksi panas, hasil estimasi dengan menggunakan filter Kalman model tereduksi lebih akurat dan waktu komputasi yang lebih singkat dari pada hasil estimasi dengan menggunakan filter Kalman pada sistem semula.
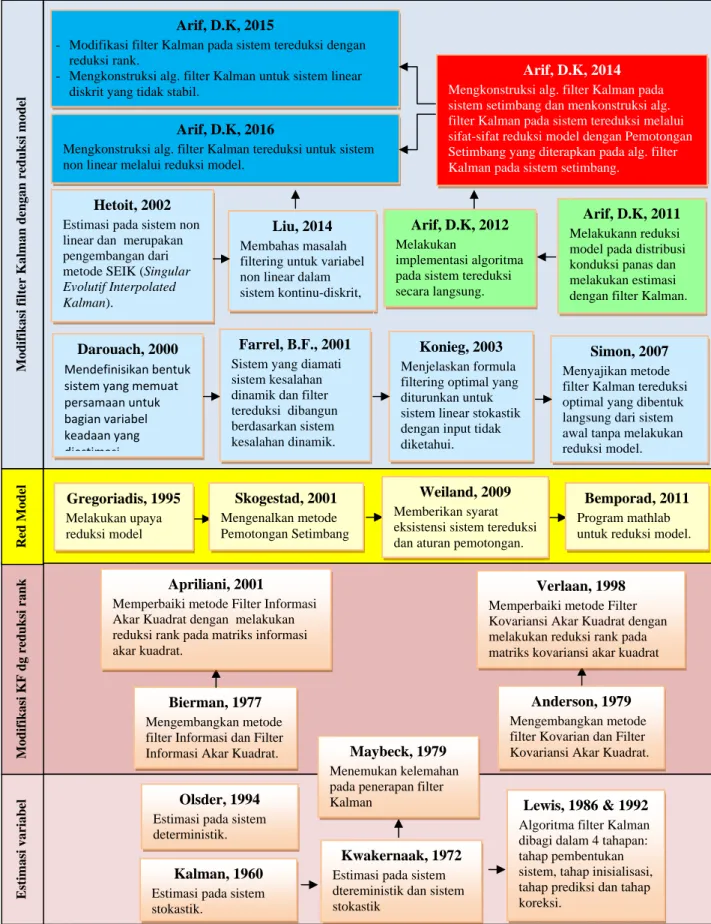
Berdasarkan uraian di atas, maka dapat dibuat roadmap penelitian yang terkait dengan pengembangan modifikasi algoritma filter Kalman pada sistem tereduksi.
Kwakernaak, 1972
Estimasi pada sistem dtereministik dan sistem stokastik
Kalman, 1960
Estimasi pada sistem stokastik.
Maybeck, 1979
Menemukan kelemahan pada penerapan filter Kalman
Anderson, 1979
Mengembangkan metode filter Kovarian dan Filter Kovariansi Akar Kuadrat.
Lewis, 1986 & 1992
Algoritma filter Kalman dibagi dalam 4 tahapan: tahap pembentukan sistem, tahap inisialisasi, tahap prediksi dan tahap koreksi.
Bierman, 1977
Mengembangkan metode filter Informasi dan Filter Informasi Akar Kuadrat.
Olsder, 1994
Estimasi pada sistem deterministik.
Apriliani, 2001
Memperbaiki metode Filter Informasi Akar Kuadrat dengan melakukan reduksi rank pada matriks informasi akar kuadrat.
Verlaan, 1998
Memperbaiki metode Filter Kovariansi Akar Kuadrat dengan melakukan reduksi rank pada matriks kovariansi akar kuadrat
Gregoriadis, 1995 Melakukan upaya reduksi model Skogestad, 2001 Mengenalkan metode Pemotongan Setimbang Weiland, 2009 Memberikan syarat eksistensi sistem tereduksi dan aturan pemotongan.
Bemporad, 2011
Program mathlab untuk reduksi model.
Darouach, 2000 Mendefinisikan bentuk
sistem yang memuat
persamaan untuk
bagian variabel
keadaan yang
diestimasi
Farrel, B.F., 2001
Sistem yang diamati sistem kesalahan dinamik dan filter tereduksi dibangun berdasarkan sistem kesalahan dinamik.
Simon, 2007
Menyajikan metode filter Kalman tereduksi optimal yang dibentuk langsung dari sistem awal tanpa melakukan reduksi model.
Liu, 2014
Membahas masalah filtering untuk variabel non linear dalam sistem kontinu-diskrit,
Hetoit, 2002
Estimasi pada sistem non linear dan merupakan pengembangan dari metode SEIK (Singular Evolutif Interpolated Kalman).
Konieg, 2003
Menjelaskan formula filtering optimal yang diturunkan untuk sistem linear stokastik dengan input tidak diketahui.
Arif, D.K, 2011
Melakukann reduksi model pada distribusi konduksi panas dan melakukan estimasi dengan filter Kalman.
Arif, D.K, 2012
Melakukan
implementasi algoritma pada sistem tereduksi secara langsung. Estimasi variab el M o difikasi KF dg r eduksi r a nk Re d M o de l Arif, D.K, 2014
Mengkonstruksi alg. filter Kalman pada sistem setimbang dan menkonstruksi alg. filter Kalman pada sistem tereduksi melalui sifat-sifat reduksi model dengan Pemotongan Setimbang yang diterapkan pada alg. filter Kalman pada sistem setimbang.
Arif, D.K, 2016
Mengkonstruksi alg. filter Kalman tereduksi untuk sistem non linear melalui reduksi model.
Arif, D.K, 2015
- Modifikasi filter Kalman pada sistem tereduksi dengan reduksi rank.
- Mengkonstruksi alg. filter Kalman untuk sistem linear diskrit yang tidak stabil.
M o difikasi filter Kalman de ngan r eduksi mode l
1.7 Metodologi Penelitian
Penelitian ini secara garis besar terbagi dalam dua kajian: kajian teori dan kajian terapan. Kajian teori berkaitan dengan pengembangan algoritma filter Kalman yang diterapkan pada sistem tereduksi, sedangkan kajian terapan berkaitan dengan implementasi hasil kajian teori untuk mendapatkan prosedur baru, yang diharapkan dapat bekerja optimal untuk melakukan estimasi variabel keadaan pada sistem diskrit dinamik berukuran besar.
Dalam disertasi ini, pertama dilakukan kajian tentang pembentukan model tereduksi dari sistem diskrit stokastik dengan menggunakan metode Pemotongan Setimbang. Selanjutnya dilakukan konstruksi algoritma filter Kalman pada sistem setimbang. Konstruksi algoritma filter Kalman pada sistem setimbang ini dilakukan dengan menerapkan langkah-langkah estimasi variabel keadaan dengan filter Kalman pada sistem setimbang. Selanjutnya dikaji sifat-sifat yang berlaku pada proses pembentukan sistem tereduksi dengan metode Pemotongan Setimbang. Berdasarkan algoritma filter Kalman pada sistem setimbang dan sifat-sifat yang berlaku pada proses reduksi model, selanjutnya dapat dilakukan konstruksi algoritma filter Kalman untuk sistem tereduksi.
Berdasarkan hasil estimasi variabel keadaan dengan menggunakan algoritma filter Kalman pada sistem tereduksi ini, maka dapat disimpulkan bahwa estimasi terhadap seluruh variabel keadaan pada suatu sistem dapat diwakili oleh estimasi pada bagian variabel keadaan yang mempunyai pengaruh besar terhadap sistem. Variabel keadaan yang mempunyai pengaruh besar terhadap sistem adalah bagian variabel keadaan yang bersesuaian dengan nilai singular Hankel yang besar. Oleh karena itu, estimasi variabel keadaan dengan algoritma filter Kalman pada sistem tereduksi membutuhkan waktu komputasi yang lebih cepat daripada menggunakan filter Kalman pada sistem semula. Disamping itu, berdasarkan hasil simulasi, diperoleh bahwa estimasi variabel keadaan dengan filter Kalman sistem tereduksi memberikan hasil yang lebih akurat dari pada hasil estimasi menggunakan filter kalman pada sistem semula.
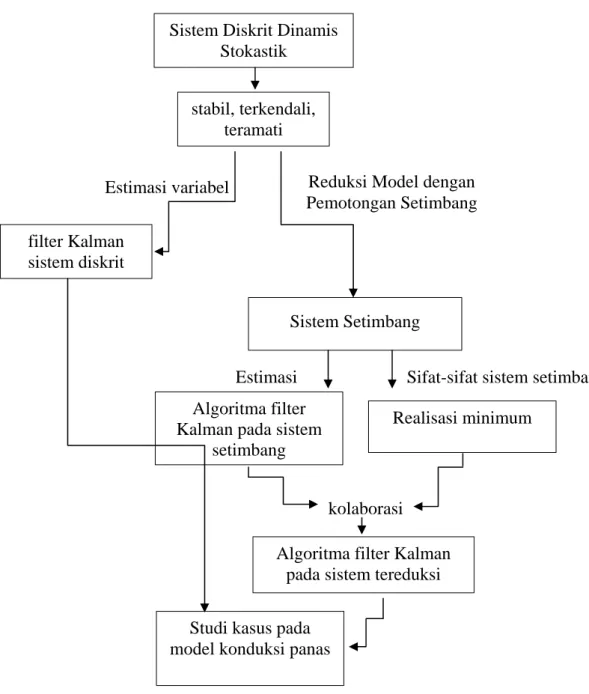
Berdasarkan uraian di atas, alur penelitian yang dikerjakan di dalam disertasi ini dapat diberikan dalam diagram alir sebagai berikut.
1.8 Sistematika Penulisan Disertasi
Disertasi ini terdiri atas lima bab. Bab I menyajikan deskripsi penilitian, ruang lingkup permasalahan dan uraian singkat hasil-hasil yang telah diperoleh. Selanjutnya pada Bab II diberikan konsep-konsep dasar yang melandasi pembahasan pada bab-bab berikutnya, seperti konsep tentang sistem linear diskrit, konsep tentang metode estimasi variabel keadaan sistem diskrit dengan filter
Sistem Diskrit Dinamis Stokastik
stabil, terkendali, teramati
filter Kalman sistem diskrit
Reduksi Model dengan Pemotongan Setimbang Estimasi variabel
Algoritma filter Kalman pada sistem
setimbang Estimasi
Algoritma filter Kalman pada sistem tereduksi
Studi kasus pada model konduksi panas
Sistem Setimbang
Sifat-sifat sistem setimbang Realisasi minimum
kolaborasi
Kalman dan konsep tentang pembentukan sistem tereduksi dengan metode Pemotongan Setimbang.
Hasil utama penelitian ini dibahas pada Bab III dan Bab IV. Pada Bab III disusun suatu algoritma filter Kalman untuk sistem tereduksi. Pembentukan algoritma filter Kalman pada sistem tereduksi ini didasarkan pada prosedur pembentukan algoritma filter Kalman pada sistem diskrit. Selanjutnya diberikan syarat-syarat tentang sifat kestabilan, keteramatan dan keterkendalian estimator yang diperoleh dari algoritma filter Kalman pada sistem tereduksi.
Selanjutnya, pada Bab V dilakukan simulasi numerik terhadap penerapan algoritma filter Kalman sistem tereduksi pada masalah konduksi panas. Pada hasil simulasi tersebut, diberikan perbandingan hasil estimasi yang telah diperoleh dari algoritma filter Kalman pada sistem tereduksi dengan hasil estimasi yang diperoleh dari algoritma filter Kalman pada sistem semula. Perbandingan yang diberikan adalah untuk menunjukkan keakurasian hasil estimasi, waktu komputasi dan konvergensi hasil estimasinya. Akhirnya, kesimpulan penelitian dan arah penelitian selanjutnya diberikan pada Bab V.