Studi Penggunaan Permanen Magnet Servo Motor Tegangan 460 V DC,
1850 Rpm Pada Mesin Potong Karton
Stephanus A. Ananda, Julius Sentosa S., Benny Augusta S.
Fakultas Teknologi Industri, Jurusan Teknik Elektro, Universitas Kristen Petra e-mail: ananda@petra.ac.id
Abstrak
Dengan kemajuan teknologi yang ada, motor listrik menjadi bagian yang tidak terpisahkan dalam kegiatan produksi. Motor DC Servo adalah merupakan salah satu motor yang banyak digunakan dalam industri karena mempunyai keunggulan yaitu mudah diatur putarannya. Dalam makalah ini akan dibahas Motor DC Servo jenis permanen magnet yang diaplikasikan dalam mesin potong karton. Pengaturan kecepatan menggunakan pengontrol kecepatan melalui perubahan frekuensi. Dari hasil pengujian di lapangan didapatkan nilai tegangan konstan, dan nilai arus, daya, dan torsi meningkat seiring meningkatnya kecepatan. Didapatkan peningkatan torsi 0,56 Nm pada putaran 102 Rpm dan naik menjadi 1,43 Nm pada putaran 255 Rpm.
Kata kunci: Motor DC Servo Permanen Magnit.
Abstract
Along with technology development, electrical motor become essential and un-separately part of production processes. Permanent Magnet DC Servo Motor is one of the motor types that often used in industry because of their superiority in speed control. This paper will discuss about Permanent Magnet DC Servo Motor that applied in the paper cutting machine. The motor’s speed is controlled by changing the frequency of the supply. From the result of the testing, the motor has constant voltage, raising current, power and torque together along the speed raise. The torque increases between 0.56 Nm (in 102 rpm) to 1.43 Nm (in 225 rpm).
Keywords: Permanent Magnet DC Servo Motor.
Pendahuluan
Karena meningkatnya kemajuan teknologi pada saat ini, motor listrik menjadi bagian yang tidak dapat terpisahkan dalam kegiatan produksi, khususnya di pabrik-pabrik. Ada suatu kebutuhan bahwa motor-motor tersebut dapat dikontrol dengan baik.
Permanen magnet dc servo motor merupakan salah satu jenis motor yang dapat dikontrol dengan mudah dan presisi tinggi. Umumnya motor jenis ini banyak digunakan dalam peralatan elektronik yang kecil, misalkan pada motor pemutar kaset video, penggerak robot dan lain sebagainya[5].
Dalam makalah ini akan dibahas cara kerja, penggunaan dan karateristik dari permanen magnet dc servo motor yang diaplikasikan pada mesin pemotongan karton yang digerakkan dengan kecepatan tinggi, dan menuntut kepre-sisian dalam proses pemotongan.
Catatan: Diskusi untuk makalah ini diterima sebelum tanggal 1 November 2002. Diskusi yang layak muat akan diterbitkan pada Jurnal Teknik Elektro volume 3, nomor 1, Maret 2003.
Dengan mengutamakan pengaturan berpresisi tinggi pada proses pemotongan karton akan dapat diperoleh hasil potongan karton dalam jumlah yang banyak dalam waktu relatif singkat, sehingga hal ini dapat memperbesar kapasitas produksi.
Motor Servo DC Magnet Permanen
Motor servo adalah jenis motor yang digunakan sebagai penggerak pada sistem servo (servo-system) seperti pada penggerak pada kontrol posisi lengan robot. Motor servo secara struktur mesin listrik ada 2 macam : dc servo motor dan ac servo motor. [2]
motor induksi 3 phasa (tanpa sikat dan cincin). Dengan menambahkan komponen permanent magnet, electronic inverter (yang menimbulkan medan putar) dan position control (umumnya menggunakan sensor effek Hall), maka akan didapatkan motor dc brushless. Jadi disini rangkaian inverter dan kontrol posisi berfungsi sebagai pengganti komutator mekanik (sikat & cincin belah) dalam membalik medan. Motor dc brushless ini mempunyai karateristik yang mendekati dc motor konvensional. [2] Untuk mengerti cara kerja Motor Servo DC Magnet Permanen haruslah dimengerti bagaimana prinsip kerja Motor DC Magnet Permanen, Motor DC tanpa sikat dan medan putar.
Motor DC Magnet Permanen
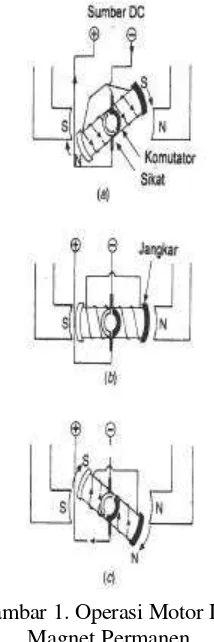
Motor dc magnet permanen adalah motor yang medan magnet utamanya berasal dari magnet permanen. Dan kumparan medan elektromag-netik digunakan untuk medan jangkar.[3] Gambar 1. memperlihatkan operasi motor dc magnet permanen. Arus mengalir melalui kumparan jangkar dari sumber tegangan dc, menyebabkan jangkar berfungsi sebagai magnet. Kutub pada kumparan jangkar akan ditarik oleh kutub medan utama dari polaritas yang berbeda, sehingga jangkar berputar. Pada Gambar 1a terlihat jangkar berputar searah dengan putaran jarum jam. Apabila kutub jangkar segaris dengan kutub medan, sikat-sikat ada pada celah di komutator sehingga tidak ada arus mengalir pada jangkar. Jadi, gaya tarik atau gaya tolak dari magnet akan berhenti, seperti tampak pada gambar 1b. Kemudian kelembaman membawa jangkar melewati titik netral. Komutator akan membalik arus jangkar ketika kutub yang tidak sama dari jangkar dan medan saling berhadapan satu sama lain, sehingga membalik polaritas medan jangkar. Kutub-kutub yang sama dari jangkar dan medan kemudian menjadi saling tolak menolak, sehingga jangkar berputar terus menerus seperti diperlihatkan pada gambar 1c. [3] Arah putaran dari motor dc magnet permanen ditentukan oleh arah arus yang mengalir pada jangkar. Pembalikan ujung-ujung jangkar tidak akan membalik arah putaran. Salah satu keistimewaan dari motor dc magnet permanen ini adalah kecepatannya dapat dikontrol dengan mudah. Kecepatan motor magnet permanen berbanding langsung dengan harga tegangan yang diberikan di jangkar. Semakin besar tegangan jangkar, semakin tinggi kecepatan motor. [3][1]
Gambar 1. Operasi Motor DC Magnet Permanen
Motor Dc Tanpa Sikat Magnet Permanen
Pada gambar 2. digambarkan operasi motor DC tanpa sikat magnet permanen. Magnet permanen dipasang pada bagian yang berputar (rotor) dan kumparan dipasang pada stator. Tidak seperti pada motor DC dengan sikat, motor DC tanpa sikat tidak dapat jalan dengan menghubung-kannya dengan sumber DC. Arus pada rangkaian stator harus disupply pada posisi rotor yang ditentukan sehingga pada kenyataannya motor dijalankan dengan arus bolak-balik. Kumparan medan stator diberi medan magnet berputar dari pemberian tegangan yang berurutan [3]. Arus disuplai dengan encoder komutasi dalam merespon sinyal dari optik atau sensor efek hall untuk menggantikan komutasi mekanik.[7] Dengan demikan bisa dihilangkan rugi-rugi gesek sikat dan komutator.
konven-sional, dan tidak ada penahanan ”fixed-steps” seperti pada motor stepper. [3]
Gambar 2. Motor DC Magnet Permanen
Medan Magnet Putar
Supply tiga phasa atau tiga kumparan yang bergeseran 1200 diruang dan diberi tegangan atau arus yang 1200 bergeser terhadap waktu (3 phasa) maka fluks resultan akan ditimbulkan dan ini seolah-olah seperti ada kutub magnetis yang diputar secara mekanis. [3][5]
Gambar 3. Pembangkitan medan-magnet putar
Pada gambar 3(b) kecepatan sinkron dapat dihitung sebagai berikut :
S = 120f
P
= 120 x 60
2
= 3600 rms
Motor arus bolak-balik diklasifikasikan sebagai motor dengan dasar prinsip pengoperasian sebagai motor induksi atau motor sinkron. Motor induksi AC adalah motor yang paling sering digunakan sebab motor ini relatif sederhana dan dapat dibuat lebih murah dibandingkan dengan yang lain. Motor induksi dapat dibuat baik untuk jenis tiga-fase maupun satu-fase, karena pada motor induksi tidak ada tegangan eksternal yang diberikansecara langsung pada rotornya. Sebagai
penggantinya, arus AC pada stator menginduksi-kan tegangan lewat celah udara dan pada lilitan rotor untuk menghasilkan arus rotor dan medan magnet. Medan magnet stator dan rotor kemudian berinteraksi dan menyebabkan rotor jadi berputar (Gambar 4.). [3][4]
Gambar 4. Arus Induksi Rotor
Motor Servo DC Magnet Permanen
Motor servo DC magnet permanen (Gambar 5.) digunakan pada mesin yang menghendaki posisi yang tepat dari objek, dimana diperlukan torsi konstan. Pemakaian lain meliputi pengoperasian katub bertekanan, penempatan cermat dari damper dan operasi khusus yang lain di berbagai aplikasi sistim kontrol. [3]
Gambar 5. Servomotor DC Magnet Permanen
Kontrol Gerak Dengan Sistem Kontrol
Loop Tertutup Menggunakan Motor
Servo Magnet Permanen
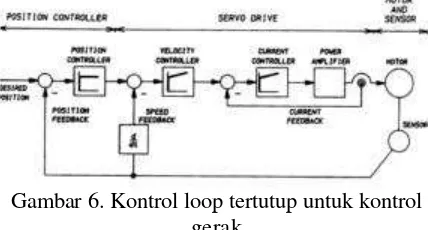
Sesuai dengan fungsinya sebagai penggerak yang terkontrol Motor Servo DC Magnet Permanen di supply dari driver elektronik yang berfungsi sebagai penyearah dan pengontrol. Dalam pengontrolan motor servo umumnya digunakan sistem loop tertutup. Struktur umum pada kontrol loop tertutup ini terdiri dari loop arus, loop kecepatan dan loop posisi. Struktur kontrol multi loop ini akan berfungsi dengan baik apabila
yang tepat. Loop arus memiliki tingkat band-width paling tinggi, loop posisi memiliki
bandwidth terendah. Bandwidth umum yang ada pada kontrol ini – 3 DB dan pergeseran fase sebesar – 450. Pada umumnya kontrol arus menggunakan PWM Amplifier dan kontrol loop tertutup dari arus pada tiap phasanya.
Gambar 6. Kontrol loop tertutup untuk kontrol gerak
Peralatan daya harus bertahan terhadap tegangan tinggi, arus tinggi dan memperlihatkan tingkat konduksi dan losses yang rendah. Saklar yang umum digunakan adalah transistor bipolar dan fet, tetapi saat ini telah ditemukan komponen baru yang disebut IGBT (Insulated Gate Bipolar Transistor). Alat ini mengkombinasikan output transistor bipolar dengan trigger dari gate dan proses pemadaman yang cepat dari FET. Pada umumnya frekuensi PWM berkisar antara 5 – 20 kHz. Sensor arus feedback sangat penting dan harus memberikan angka yang tepat dari arus yang sebenarnya. Sinyal arus feedback diban-dingkan dengan perintah yang diberikan saat itu, akan menghasilkan sinyal error dari arus. Error
yang terjadi diproses oleh regulator untuk menghasilkan perintah terhadap tegangan motor. Sinyal tegangan dibandingkan dengan gelom-bang segitiga untuk menghasilkan sinyal PWM yang memerintahkan komponen daya untuk menghidupkan dan mematikan sistem. Teknik PWM banyak digunakan pada konversi daya DC ke AC [7].
Gambar 7. Loop arus 3 phasa untuk PWM power amplifier
Pengumpulan Data
Dari hasil pengamatan terhadap mesin potong karton didapatkan bahwa mesin potong tersebut terdiri dari dua motor servo permanen magnet yaitu motor upper dan motor lower. Pada saat pemotongan karton, hanya diggunakan salah satu dari motor servo permanen magnet. Berikut ini adalah identifikasi dan hasil pengukuran ter-hadap motor servo permanen magnet:
NAME PLATE
Permanen Magnet Servo Motor
480V 30A S1
RPM.1850 I4 IEC 34-1 (1983)
Power Factor 1.0
INS CL H Max Amb 55°C
WT 116kg IP-54
Data Pengukuran Pada Mesin Potong
Karton
Tabel 1. Tegangan terhadap Putaran
n Tegangan
(rpm) A1-A2 B1-B2 C1-C2 D1-D2
102 306.7 237.5 240.9 275 134 295.3 233.4 265.3 276.6 159 275.3 249.3 273.2 278.9 185 310.7 225.1 248.8 280.1 229 297.1 295.9 302.8 346 255 271.3 227.1 245.4 333.2
Tabel 2. Arus terhadap Putaran
n Arus
(rpm) A1-A2 B1-B2 C1-C2 D1-D2
102 2.26 5.00 1.87 1.77 134 2.54 1.87 3.05 4.06 159 5.13 4.14 4.37 2.39 185 8.35 8.90 6.42 2.84 229 5.10 10.38 10.55 8.74 255 1.09 9.10 11.43 10.68
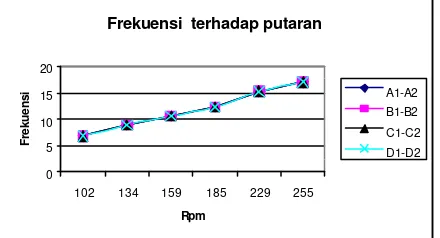
Tabel 3. Frekuensi terhadap Putaran
n Frekuensi
(rpm) A1-A2 B1-B2 C1-C2 D1-D2
102 6,8 6,8 6,8 6,8
134 8,933 8,933 8,933 8,933 159 10,6 10,6 10,6 10,6 185 12,33 12,33 12,33 12,33 229 15,27 15,27 15,27 15,27
FLUKE-43
Gambar 8. Rangkaian Pengukuran di Terminal A1-A2
Analisa Data
Dari hasil pengumpulan data didapat grafik yang dapat dianalisa sebagai berikut:
Frekuensi terhadap putaran
0 5 10 15 20
102 134 159 185 229 255
Rpm
Gambar 9. Grafik f terhadap putaran
Pengaturan putaran motor diatur dengan mengubah frekuensi sumber, maka pada grafik frekuensi (f) terhadap putaran pada gambar 1. dapat dilihat bahwa hubungan kenaikan frekuensi terhadap putaran cukup linier.Terlihat frekuensi naik bersamaan pada keempat kumparan dengan jarak antara masing-masing kumparan berhimpit. Frekuensi pada tiap kumparan juga mengalami kenaikan, sejak dari putaran 102 rpm hingga 255 rpm frekuensi terus naik.
Tegangan terhadap putaran
0 100 200 300 400
102 134 159 185 229 255
rpm
Gambar 10. Grafik V terhadap putaran
Arus terhadap putaran
0.00
102 134 159 185 229 255
rpm
Gambar 11. Grafik I terhadap putaran
V-I (A)
Gambar 12. Grafik V terhadap I (A)
V-I (B)
5.00 1.87 4.14 8.90 10.38 9.10
Arus B1-B2
Tegangan B1-B2
V-I (B)
Gambar 13. Grafik V terhadap I (B)
V-I (C)
1.87 3.05 4.37 6.42 10.55 11.43
Arus C1-C2
Tegangan C1-C2
V-I (c)
V-I (D)
1.77 4.06 2.39 2.84 8.74 10.68
Arus D1-D2
Tegangan D1-D2
V-I (D)
Gambar 15. Grafik V terhadap I ( D )
Dari grafik tegangan (V) terhadap n (putaran) pada gambar 10 terlihat bahwa tegangan antara masing-masing kumparan hampir berdekatan atau berhimpit dan cenderung konstan. Pada tiap kumparan di putaran 102 rpm hingga 255 rpm, terlihat tegangannya konstan berada dikisaran 225 V hingga 350 V.
Sedangkan dari grafik arus (I) terhadap n (putaran) pada gambar 11 terlihat bahwa Arus antara masing-masing kumparan hampir berdekatan atau berhimpit. Hanya pada A1 – A2 arus terlihat turun, dan yang lain cenderung naik. Tiap kumparan diputaran 102 rpm hingga 255 rpm memiliki arus yang cenderung naik (kurang lebih 12 A), hanya pada kumparan A mengalami penurunan arus setelah mencapai putaran 185 rpm.
Dari grafik V terhadap IA, IB, IC, dan ID pada gambar 12 sampai gambar 15 terlihat bahwa tegangan konstan. Pada grafik tegangan terhadap arus tampak bahwa tegangan untuk tiap kumparan konstan diantara 250 V – 350 V.
Jadi secara umum dapat dikatakan tegangan relatif konstan pada kenaikan putaran. Sedangkan arus meningkat seiring dengan kenaikan putaran.
P in terhadap putaran
0.0
102 134 159 185 229 255
rpm
P in P in
Linear (P in)
Gambar 16. Grafik P input terhadap putaran
P loss terhadap putaran
0
102 134 159 185 229 255
rpm
P loss
Linear (P loss)
Gambar 17. Grafik P loss terhadap putaran
P out terhadap putaran
0.0
102 134 159 185 229 255
rpm
P Out
P Out
Linear (P Out)
Gambar 18. Grafik P output terhadap putaran
Torsi terhadap putaran
0.0 0.5 1.0 1.5 2.0
102 134 159 185 229 255
rpm
Torsi
Torsi Linear (Torsi)
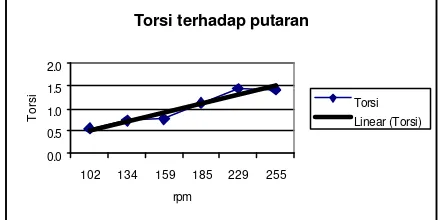
Gambar 19. Grafik Torsi terhadap putaran
Dari data pengukuran dapat dihitung daya input (Pin), daya output (Pout), daya rugi-rugi (Ploss), dan Torsi (T) lalu digambarkan grafiknya terhadap fungsi putaran. Grafik P input terhadap n (putaran) pada gambar 16 terlihat bahwa trendline linier dan naik. Corelation = 0,9751.
Sedangkan dari grafik P loss terhadap n (putaran) pada gambar 17 terlihat bahwa trendline linier dan naik. Correlation = 0,963. Dari grafik Daya Nyata (P) output terhadap n (putaran) pada gambar 18 terlihat bahwa garis trend terlihat naik. Correlation = 0,985.
berfluktuasi sedikit. Correlation = 0,972 (Correlation mendekati 1 berarti mendekati linier). Torsi yang dihasilkan dari putaran 102 rpm hingga 255 rpm terus naik, hanya sedikit berfluktuasi pada putaran 159 rpm dan 229 rpm. Didapat juga nilai torsi terendah sebesar 0,56 Nm pada putaran 102 rpm dan torsi tertinggi sebesar 1,43 Nm pada putaran 255 rpm.
Secara umum dapat dilihat bahwa P in, P loss dan P out, terus naik dari putaran 102 rpm hingga 255 rpm.
Kesimpulan
1. Dari karateristik tegangan terhadap putaran didapat bahwa tegangan relatif konstan di 225-350 V
2. Secara umum arus naik seiring dengan kenaikan kecepatan hingga mencapai sekitar 12 A.
3. Daya input, daya loses dan Torsi meningkat secara linier seiring dengan kenaikan kecepatan. Torsi mencapai 1,43 Nm pada putaran 255 rpm.
4. Grafik arus terhadap tegangan ditiap kumparan relatif konstan disekitar 250-350 V.
References
[1]. Kadir, Abdul, Prof. Ir., Pengantar Teknik Tenaga Listrik., Jakarta: LP3ES, 1991. [2]. Kenjo, Tak, Electric Motors and Their
Controls : An Introduction, Oxford, Oxford University Press : 1991.
[3]. Petruzella, Frank D., Industrial Electronics.,
Diterjemahkan oleh : Drs. Sumanto, MA, Yogyakarta : Andi Offset, 1996.
[4]. Panjaitan, R. Drs., Mesin Arus Bolak Balik.,
Jakarta: Erlangga, 1989.
[5]. Theraja, B.L., Text Book of Electrical Techonology., New Delhi; Publication Division of Nirja Construction & Development, 1984.
[6]. Veinot, Cyril G., Martin, Joseph E. Martin, Fractional and Subfractional Horse Power Electric Motors., Cledonia:University Gra-phics, 1986.
[7]. ___, Handbook Electro-craft Servo System.,