JCONES Vol. 6, No. 2 (2017) Hal: 108-117
Journal of Control and Network Systems
Situs Jurnal: http://jurnal.stikom.edu/index.php/jconesRANCANG BANGUN OTOMASI TEMPORARY BOGIE DAN
TRAVERSER PADA PT. INDUSTRI KERETA API (PERSERO)
BERBASIS ARDUINO UNO
Baruna Adi Laksana1) Susijanto Tri Rasmana 2) Yosefine Triwidyastuti 3)
Program Studi/Jurusan Sistem Komputer Institut Bisnis dan Informatika STIKOM Surabaya
Jl. Raya Kedung Baruk 98 Surabaya, 60298
Email: 1) [email protected], 2) [email protected], 3) [email protected]
Abstract:Today, the need in the industry on production equipment is absolutely necessary in order to improve efficiency, cost and time. At these factors we develop a Traverser and Temporary Bogie in PT. INKA (Persero). Temporary bogie is a tool comprising of two wheels or more devices coupled together, While the traverser is a means of transport walking bridge that is ready to deliver Bogie to the destination between workshops. In this Final project,Temporary Bogie is designed back and miniature prototype complete with a model workshop. In designing Traverser and Temporary Bogie, we added a DC motor, Infrared Proximity sensor, I2C and LCD controller driver board with microcontroller-based Arduino UNO. By working tool that is easy, it can facilitate the process of moving goods between workshop material in PT. INKA (Persero). Based on the results of the final test on this study, as many as 36 times, the average error percentage is 29.15%. And to the results of the testing of pure success reached a level of 76.7%.
Keywords: Infrared, Proximity, DC motor, Arduino, LCD
Pertumbuhan teknologi dewasa ini telah berkembang luas. Khususnya di Indonesia sendiri sebagai negara berkembang pertumbuhan teknologi di dunia industri terus meningkat setiap tahunnya. Transportasi pun juga ikut berkembang sesuai dengan kemajuan teknologi karena permintaan akan pasar terus meningkat di tiap daerah.
Banyaknya jumlah produksi yang dilakukan mempengaruhi perlunya penggunaan suatu peralatan untuk pemindahan barang. Peralatan pemindahan barang dibuat untuk memudahkan pekerjaan, tidak menutup kemungkinan digunakan untuk meringankan pembawaan barang jika barang terlalu berat ataupun terlalu besar untuk dibawa oleh manusia.
Pada studi kasus pemindahan barang di PT. INKA (Persero) yang masih menggunakan teknologi konvensional yaitu di dorong menggunakan forklift. Padahal peran
Temporary Bogie sangatlah besar di divisi
produksi untuk mengkat bahan bahan material – material dan juga bahkan pemindahan gerbong setengah jadi antar workshop . Oleh karena itu, dibuat perancangan Temporary
Bogie pintar yaitu dengan sebutan Smart Temporary Bogie yang berkonsep tenaga robot
atau bisa disebut berjalan otomatis tanpa bantuan dorong forklift yang tidak tepat guna sebagai sarana alat dorong Temporary Bogie.
Dalam tugas akhir ini akan dibuat sebuah miniatur peralatan pengangkut barang yang bertujuan sebagai bentuk miniatur pemindah barang sebenarnya yang ada pada PT. INKA (Persero). Perangkat ini berfungsi sebagai miniatur media untuk memindahkan barang, dimana terdapat tiga tempat asal barang dan tiga tempat tujuan barang yang digunakan sebagai miniatur pemindahan barang pada PT. INKA (Persero). Traverser dan Bogie digunakan untuk pengangkutan barang Arduino UNO digunakan sebagai kontrolernya.
Traverser
Traverser adalah sebuah alat bantu
penyebrangan material dan badan kereta api untuk dipindahkan dari suatu proses ke proses selanjutnya. (PT INKA (Persero). 2014).
Bogie
Bogie merupakan sistem kesatuan roda
pada kereta api, baik di kereta berpenggerak maupun kereta non penggerak. Bogie pada umumnya dipakai untuk roda yang jumlahnya lebih dari 2 gandar (As) dalam satu kereta. (PT INKA (Persero). 2014).
Arduino UNO
Arduino Uno adalah papan pengembangan
(development board) mikrokontroler yang berbasis chip ATmega328P. Disebut sebagai papan pengembangan karena board ini memang berfungsi sebagai arena prototyping sirkuit mikrokontroller.
Arduino Uno memiliki 14 digital pin input
/ output atau biasa ditulis I/O, dimana 6 pin diantaranya dapat digunakan sebagai output PWM, 6 pin input analog, menggunakan
crystal 16 MHz, koneksi USB, jack listrik, header ICSP dan tombol reset.(Ecadio. 2015).
LCD
LCD (Liquid Crystal Display) adalah suatu jenis media tampil yang menggunakan kristal cair sebagai penampil utama. LCD digunakan diberbagai bidang seperti alat elektronik, kalkulator, atau pun layar komputer. LCD menggunakan dot matrik dengan jumlah karakter 2 x 16 sebagai media penampil dan dapat dilihat pada gambar 2.9. LCD berfungsi sebagai penampil yang akan digunakan untuk menampilkan status kerja alat.(Bintangtyo. 2014).
I2C (Inter Integrated Circuit)
I2C (Inter Integrate Circuit) adalah standar komunikasi serial dua arah menggunakan dua saluran yang didesain khusus untuk pengontrolan IC (Lihat Gambar 2.10). Sistem I2C terdiri dari saluran SCL (Serial Clock) dan SDA (Serial Data) yang membawa informasi data antara I2C dengan pengontrolnya. Piranti yang dihubungkan dengan sistem I2C Bus dapat dioperasikan sebagai Master dan Slave. Master adalah piranti yang memulai transfer data pada I2C Bus dengan membentuk sinyal Start, mengakhiri transfer data dengan membentuk sinyal Stop, dan membangkitkan sinyal clock. Slave adalah piranti yang dialamati master.
Infrared Proximity Sensor E18-D80NK
Modul infrared proximity E18-D80NK merupakan salah satu jenis dari kategori modul
infrared dimana modul ini memiliki bentuk
yang ringkas dan rapi dari segi pemasangan
secara tepat. Untuk mendeteksi ada atau tidaknya benda dibawah robot Traverser dan
Bogie, digunakan sensor jarak yang berbasis
pada infrared. Modul yang digunakan adalah modul sensor E18-D80NK
UBEC 3A-5A
UBEC (Universal Battery Elemination Circuit) adalah rangkaian elektronik eksternal yang berfungsi memberikan daya dari baterai dan berfungsi sebagai regulasi tegangan hingga 5/6 Volt. UBEC digunakan pada Traverser dan
Bogie karena spesifikasi UBEC yang menghasilkan tegangan output 5/6 VDC yang sesuai kebutuhan pada inputan motor DC, sensor, LCD I2C maupun Instrumentasi lainnya input dan memiliki arus keluaran yang stabil sehingga tidak mudah merusak komponen.
Keypad Membran 4x4
Keypad adalah bagian penting dari suatu perangkat elektronika yang membutuhkan interaksi manusia. Keypad berfungsi sebagai interface antara perangkat (mesin) elektronik dengan manusia atau dikenal dengan istilah HMI (Human Machine Interface). Matrix keypad 4×4 merupakan salah satu contoh keypad yang dapat digunakan untuk berkomunikasi antara manusia dengan mikrokontroler.
Motor DC
Motor DC adalah motor yang bergerak dengan putaran 360 derajat , biasa disebut dinamo, biasa digunakan sebagi penggerak roda, apa bila sumber positif dan
negative dipaang terbalik maka motor DC akan
berlawan arah dari arah putaran sebelumnya. Pada motor DC, daerah kumparan medan yang dialiri arus listrik akan menghasilkan medan magnet yang melingkupi kumparan jangkar dengan arah tertentu. (Zuhal. 1988).
HMI (Human Machine Interface)
Human Machine Interface (HMI)
adalah sistem yang menghubungkan antara manusia dan teknologi mesin. HMI dapat berupa pengendali dan visualisasi status, baik dengan manual maupun melalui visualisasi komputer yang bersifat real time. Sistem HMI biasanya bekerja secara online dan real time dengan membaca data yang dikirimkan melalui I/O port yang digunakan oleh sistem
Power Supply
Sistem power supply merupakan faktor yang paling penting dalam suatu sistem, baik yang bersifat analog maupun digital. Karena suatu sistem tidak akan berfungsi atau berjalan dengan baik tanpa mendapat sumber tegangan dan bisa dikatakan sebagai suatu rangkaian yang menyediakan daya.
METODE
Pada rancangan pengerjaan tugas akhir ini penggambaran perancangan sistem seperti pada gambar 1 berikut.
Gambar 1 Model perancangan track antar
workshop
Tahapan desain maket workshop ini digambar dan dirancang untuk mempermudah pembacaan desain secara real. Desain maket ini digambar dalam bentuk gambar 2D dan disertakan juga dengan bentuk 3D yang bertujuan memudahkan mengenali antara
workshop X dan workshop Z. Pada desain
berikut juga telah diberikan visualisasi warna pembeda antara kedua workshop dan juga track jalur khusus traverser dengan ukuran maket yang disesuaikan. Seperti yang telah dibuat dalam bentuk real multiplek dan kayu yang telah dipotong sesuai rangka dan bagian-bagiannya secara detail. Berikut tampilan gambar isometri dalam bentuk 2D pada gambar 2.
Gambar 3 Gambar Isometri 2D Setelah gambar isometri atau gambar 2D telah selesai, tahap selanjutnya adalah membuat desain gambar 3D dengan mengolah
gambar isometri yang berbentuk 2D diolah lagi dengan bantuan 3DsMax 2013. Berikut desain gambar 3D dari bentuk maket :
Gambar 4 Desain 3D dari Maket
Gambar 5 Desain 3D bentuk fisik Bogie
Gambar 6 Desain 3D bentuk fisik Traverser
Gambar 7 Penempatan traverser pada maket.
Gambar 8 Gambar 3D desain maket, traverser dan bogie.
Perancangan Motor driver dan Motor
DC
Rangkaian motor driver menggunakan modul motor driver L298N H-bridge 2A yang mempunyai 2 output motor kontroler. Dengan driver motor H-bridge, kita dapat mengendalikan putaran as motor DC dalam dua arah, baik berputar searah jarum jam maupun berputar berlawanan arah jarum jam dan juga dapat mengatur kecepatan PWM
(Pulse Width Modulation) pada motor DC.
Gambar 9 Rangkaian modul motor driver L298N H-bridge 2A dengan motor DC yang
terhubung dengan Arduino UNO
Perancangan sensor Infrared Proximity
E18-D80NK
Pada perancangan proyek ini meggunakan sensor infrared proximity E18-D80NK karena mempunyai jarak sensing yang dapat diatur melalui trimmer pada belakang sensor. Kelebihan sensor ini mempunyai kepala cembung yang mendifusi cahaya infrared ke sebuah benda sebagai detektor untuk umpan balik mengirim data ke arduino yang kemudian mendapatkan informasi yang ditampilkan ke LCD dan motor driver sebagai kondisi motor berjalan atau berhenti.
Gambar 10 Rangkaian infrared proximity
Perancangan UBEC (Universal Battery
Elemination Circuit) 3A-5A
Perangkat eksternal elektronika yang disematkan pada proyek ini berfungsi sebagai memberikan daya dari baterai dan berfungsi sebagai regulasi tegangan hingga 5/6 Volt. Spesifikasi UBEC yang menghasilkan tegangan output 5/6 VDC yang sesuai kebutuhan pada inputan motor DC, sensor, LCD I2C maupun Instrumentasi lainnya input dan memiliki arus keluaran yang stabil sehingga tidak mudah merusak komponen.
Gambar 11 Rangkaian pemasangan UBEC Kegunaan utama UBEC adalah pentingnya output dengan tegangan 5v DC yang stabil dari power supply ber-arus DC yang lebih besar dari output dari UBEC yaitu yang bernilai 5v DC. Dengan sumber tegangan 5v DC dari UBEC langsung disalurkan ke terminal power yang berisi port in tegangan 5v DC dan ground, karena banyak instrumen sensor, arduino, LCD I2C dan perangkat lainnya banyak menggunakan sumber tegangan 5v.
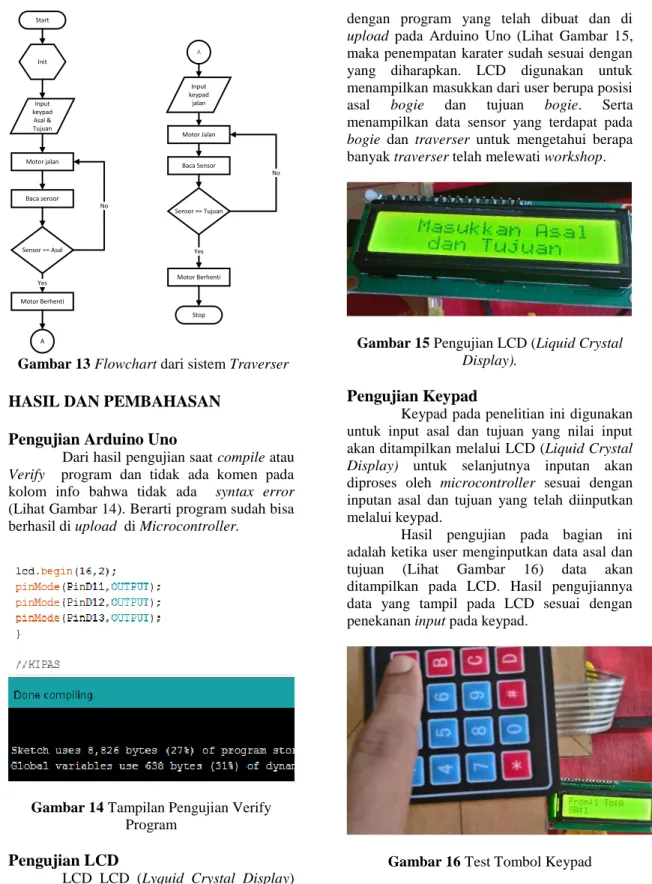
Algoritma Kontrol Sistem
Sistematika Flowchart dari system seperti berikut : Start Init Motor jalan Baca sensor Sensor == Tujuan Motor Berhenti Stop Yes No Input Tombol
Start Init Motor jalan Baca sensor Sensor == Asal Motor Berhenti Motor Jalan Baca Sensor Sensor == Tujuan Motor Berhenti Stop Yes Yes No No Input keypad Asal & Tujuan Input keypad jalan A A
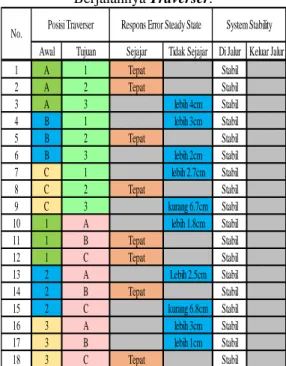
Gambar 13 Flowchart dari sistem Traverser
HASIL DAN PEMBAHASAN
Pengujian Arduino Uno
Dari hasil pengujian saat compile atau Verify program dan tidak ada komen pada kolom info bahwa tidak ada syntax error (Lihat Gambar 14). Berarti program sudah bisa berhasil di upload di Microcontroller.
Gambar 14 Tampilan Pengujian Verify Program
Pengujian LCD
LCD LCD (Lyquid Crystal Display) digunakan untuk menapilkan kelembaban dan suhu yang ada pada ruangan greenhouse dan monitoring suhu dan kelembaban dan menampilkan setting point suhu dan kelembaban.
Dari LCD (Liquid Crystal Display) menunjukkan hasil tampilan yang sesuai
dengan program yang telah dibuat dan di upload pada Arduino Uno (Lihat Gambar 15, maka penempatan karater sudah sesuai dengan yang diharapkan. LCD digunakan untuk menampilkan masukkan dari user berupa posisi asal bogie dan tujuan bogie. Serta menampilkan data sensor yang terdapat pada bogie dan traverser untuk mengetahui berapa banyak traverser telah melewati workshop.
Gambar 15 Pengujian LCD (Liquid Crystal Display).
Pengujian Keypad
Keypad pada penelitian ini digunakan untuk input asal dan tujuan yang nilai input akan ditampilkan melalui LCD (Liquid Crystal Display) untuk selanjutnya inputan akan diproses oleh microcontroller sesuai dengan inputan asal dan tujuan yang telah diinputkan melalui keypad.
Hasil pengujian pada bagian ini adalah ketika user menginputkan data asal dan tujuan (Lihat Gambar 16) data akan ditampilkan pada LCD. Hasil pengujiannya data yang tampil pada LCD sesuai dengan penekanan input pada keypad.
Gambar 16 Test Tombol Keypad
Pengujian Sensor Infrared Proximity
Pengujian ini adalah pengujian yang dilakukan terhadap sensor infrared proximity, dimana sensor ini adalah sensor yang digunakan untuk mendeteksi traverser sudah melewati berapa banyak workshop yang mendeteksi adanya benda sebagai detektor
yang dibaca oleh infrared proximity dan memberikan informasi data pada Arduino yang ditujukan ke motor driver sebagai tanda motor berhenti atau berjalan.
Hasil pengujian yang dilakukan terhadap sensor infrared proximity adalah sensor dapat mendeteksi ada atau tidaknya sebuah benda dan indikator lampu akan menyala (Lihat Gambar 17).
Gambar 17 Sensor Infrared Proximity mendeteksi benda
Apabila terdapat sebuah benda didepan sensor dengan radius 0 sampai 10 cm maka akan dideteksi adanya benda, namun apabila pada radius 0 sampai 10 cm tidak terdapat benda maka akan dideteksi sebagai nilai 0 atau false dan lampu indikator tidak menyala (Lihat Gambar 18).
Gambar 18 Sensor Infrared Proximity tidak mendeteksi benda
Pada gambar 17 menunjukkan sesnsor mendeteksi benda yang ditandai dengan menyalanya lampu indikato dan sedangkan pada gambar 18 indikator lampu pada sensor tidak menyala apabila sensor tidak mendeteksi benda.
Pengujian Motor Driver dan Motor DC
Pengujian motor driver ini merupakan pengujian terhadap motor driver. Dimanafungsi dari motor driver ini untuk menjalankan motor DC dapat berjalan diatas rel dengan olah digital sesuai program dari Arduino UNO.
Pada hasil pengujian ini dilakukan terhadap motor driver dan motor DC dimana motor driver (Lihat gambar 19) dapat men-drive motor DC berjalan ketika diberi perintah dari arduino khususnya traverser (Lihat gambar 20) yang dapat berjalan menuju workshop tujuan yang bergerak dari kondisi awal (asal) untuk menjemput bogie dari track yang berada pada workshop asal. Jika traverser sudah sampai di workshop tujuan maka traverser akan berhenti, kemudian bogie berjalan menuju atas traverser yang merupakan jembatan pengantar bogie menuju track di workshop tujuan. Dari kondisi tersebut dapat disimpulkan bahwa motor pada traverser dan bogie (Lihat gambar 21) dapat berjalan sesuai input dari program.
Gambar 19 Motor Driver Aktif
Gambar 20 Motor pada traverser berjalan
Gambar 21 Bogie bergerak menuju track tujuan
Pengujian keseluruhan Sistem
Tujuan pengujian ini adalah untuk mengetahui respon dari sensor infrared proximity dan juga ketepatan pergerakan motor. Sensor infrared proximity dan motor
DC ini dapat berjalan sesuai dengan rancangan dan rumusan masalah yang dibuat pada proyek ini.
Hasil pengujian ini berupa data acak keberhasilan yang dimaksud adalah data pengujian keberhasilan bogie yang berhasil berjalan dari posisi awal pada sebuah track acak yang berada pada posisi workshop X menuju salah satu track yang berada pada workshop Z. Berjalannya pengujian bogie terus berlanjut bergantian menuju track secara acak yang berjumlah 6 track yaitu 3 track yang berada di workshop X dan 3 track yang berada di workshop Z.
Gambar 22 Bogie telah berhasil menuju tujuan akhir dan sensor mendeteksi benda dan motor
berhenti.
Gambar 23 Bogie berada diatas traverser dan siap diantar ke track tujuan.
Gambar 24 Traverser berhasil mengantar bogie ke track tujuan.
Pengujian keberhasilan traverser juga dilakukan dengan melakukan input oleh user yang dilakukan melalui keypad dengan memasukkan nilai asal (menjemput bogie) dan tujuan (mengantarkan bogie) dari salah satu
track di workshop asal menuju salah satu track pada workshop tujuan. Pengujian data keberhasilan dilakukan sebanyak 18 kali percobaan. Berikut daftar tabel percobaannya :
Tabel 1 Pengujian Akhir keberhasilan Berjalannya Traverser.
Awal Tujuan Sejajar Tidak Sejajar Di Jalur Keluar Jalur
1 A 1 Tepat Stabil 2 A 2 Tepat Stabil 3 A 3 lebih 4cm Stabil 4 B 1 lebih 3cm Stabil 5 B 2 Tepat Stabil 6 B 3 lebih 2cm Stabil 7 C 1 lebih 2.7cm Stabil 8 C 2 Tepat Stabil 9 C 3 kurang 6.7cm Stabil 10 1 A lebih 1.8cm Stabil 11 1 B Tepat Stabil 12 1 C Tepat Stabil 13 2 A Lebih 2.5cm Stabil 14 2 B Tepat Stabil 15 2 C kurang 6.8cm Stabil 16 3 A lebih 3cm Stabil 17 3 B lebih 1cm Stabil 18 3 C Tepat Stabil
No. Posisi Traverser Respons Error Steady State System Stability
Tabel 1 merupakan tabel pengujian akhir pada traverser yang telah dilakukan pengujian sebanyak 18 kali. Pada tabel 1 diatas di jelaskan bahwa user telah memasukkan perintah ke traverser pada posisi berangkat menjemput bogie di posisi awal dan juga memasukkan posisi berhentinya traverser sebagai tujuan akhir bogie. Pengujian ini di dalamnya terdapat dua kondisi yang termasuk dalam sistem pengaturan yaitu ada Respons Error Steady State dan System Stability. Kemudian untuk kondisi Respons Error Steady State terdapat dua kondisi yaitu apakah rel pada traverser berhasil sejajar dengan rel workshop atau tidak sejajar. Dan yang terakhir adanya kondisi System Stability yang memiliki dua kondisi apabila traverser akan keluar jalur rel ketika sedang berjalan dan traverser akan tetap stabil di jalur rel.
Dari pengujian tabel diatas dapat disimpulkan bahwa pada saat kondisi Respons Error Steady State traverser telah berhasil sejajar dengan rel sebanyak 8 kali dari 18 kali percobaaan yang dilakukan antar track yang terdapat di workshop. Sehingga terjad error sebanyak 10 kali dari 18 percobaan dengan persentase 58% traverser telah berhenti di keadan rel tidak sejajar. Besarnya nilai error dapat disimpulkan dari rata-rata total ke-tidak
sejajaran traverser yaitu sebanyak 1.86 cm. Selanjutnya kondisi terakhir pada tabel pengujian diatas yaitu System Stability, traverser telah berjalan stabil sesuai pada jalur dengan persentase sebanyak 100% dan 0% tanpa keluar jalur.
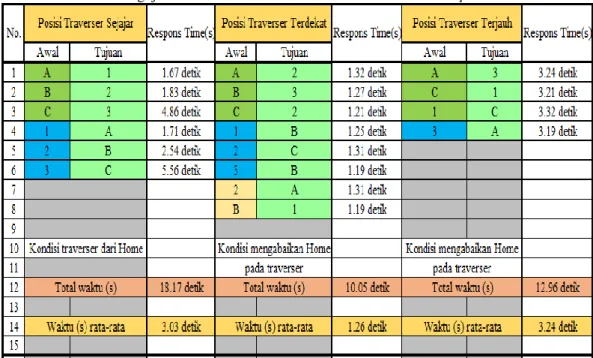
Pada tabel 2 adalah tabel Pengujian akhir dari keberhasilan pengujian berjalannya traverser dengan memperhatikan respons time. Pada tabel 2 diatas di jelaskan bahwa user telah memasukkan perintah ke traverser pada posisi awal berangkat dan tujuan pada salah satu titik berhentinya traverser sebagai tujuan akhir traverser. Pengujian ini di dalamnya terdapat kondisi yang termasuk dalam sistem pengaturan yaitu Respons Time (s). Pada tabel pengujian 2 ini diabagi menjadi tiga kondisi yaitu ketika traverser sejajar, kondisi traverser terdekat dan koondisi traverser terjauh.
Dari pengujian diatas pada saat posisi traverser sejajar dilakukan 6 kali pengujian dengan mengambil posisi traverser melibatkan posisi Home sebagai titik awal traverser berada. Posisi traverser sejajar mendapatkan rata-rata waktu sebanyak 3.03 detik dari total waktu 18.17 detik. Sedangkan posisi traverser terdekat dilakukan percobaan sebanyak 8 kali pengujian. Dengan mengabaikan kondisi Home diperoleh rata-rata waktu sebanyak 1.26 detik dengan total waktu 10.05 detik. Yang terakhir merupakan pengujian traverser dengan posisi terjauh yaitu dengan dilakukannya 4 kali percobaan. Kondisi ini sama halnya dengan mengabaikan kondisi Home. Sehingga rata-rata
waktu yang didapat sebanyak 3.24 detik dari total waktu sebanyak 12.96 detik.
Dapat disimpulkan bahwa Respons Time(s) akan berbeda di setiap pengelompokan antara traverser pada posisi sejajar mendapat rata-rata waktu Respons Time(s) sebanyak 3.03 detik, posisi traverser terdekat mendapatkan rata-rata waktu Respons Time(s) sebanyak 1.26 detik dan posisi traverser terjauh mendapatkan rata-rata waktu Respons Time(s) sebanyak 3.24 detik.
Tabel 3 Pengujian Akhir Keberhasilan Berjalannya Bogie
1/2 Perjalanan 1 Perjalanan On Point Point Lost Di Jalur Keluar Jalur
1 6.22 detik Ya Stabil
2 3.42 detik Ya Stabil
3 3.37 detik Ya Stabil
4 3.39 detik Ya Stabil
5 6.29 detik Ya Stabil
6 6.27 detik Error Keluar Jalur
7 3.39 detik Ya Stabil
8 3.44 detik Ya Stabil
9 10.54 detik Error Keluar Jalur 10 12.11 detik Error Keluar Jalur 11 7.14 detik Error Keluar Jalur
12 3.36 detik Ya Stabil
13 3.44 detik Ya Stabil
14 6.31 detik Ya Stabil
15 3.38 detik Ya Stabil
16 8.14 detik Error Keluar Jalur 17 7.49 detik Error Keluar Jalur 18 14.23 detik Error Keluar Jalur No. Respons Time(s) Respons Error Steady State System Stability Tabel 2 Pengujian Akhir Keberhasilan Traverser berdasarkan Respons Time.
Pada tabel 3 adalah tabel Pengujian akhir dari keberhasilan pengujian berjalannya bogie dengan pengujian sebanyak 18 kali. Pada tabel 3 diatas di jelaskan bahwa user telah memasukkan perintah ke bogie pada posisi awal berangkat bogie di posisi track pada salah satu workshop dan juga memasukkan posisi titik berhentinya bogie sebagai tujuan akhir bogie. Pengujian ini di dalamnya terdapat tiga kondisi yang termasuk dalam sistem pengaturan yaitu ada Respons Time (s), Respons Error Steady State, dan System Stability. Pada kondisi Respons Time (s) terdapat dua perbedaan perjalanan bogie dimana ½ perjalanan merupakan bogie berjalan dari track asal ke titik berhenti traverser, kemudian 1 perjalanan di hitung dari bogie berjalan dari awal menuju tujuan berhenti di track yang ada di workshop seberang. Pada kondisi 1 perjalanan khusus untuk kondisi track dan traverser sejajar lurus. Kemudian untuk kondisi Respons Error Steady State terdapat dua kondisi yaitu apakah bogie berhasil tepat di titik akhir pada track yang ada pada setiap workshop atau tidak. Dan yang terakhir adanya kondisi System Stability yang juga memiliki dua kondisi apakah bogie akan keluar jalur rel ketika sedang berjalan dan bogie akan tetap stabil di jalur rel.
Dari pengujian tabel diatas dapat disimpulkan bahwa pada kondisi Respons Time (s) bogie telah berhasil tepat waktu dengan persentase sebanyak 67% dengan rata-rata waktu 2.56 detik, dan bogie gagal tepat waktu mendapatkan persentase sebanyak 33% dengan waktu rata-rata error +3.66 detik. Kemudian pada saat kondisi Respons Error Steady State, bogie telah berhasil berhenti tepat di titik akhir pemberhentian sebanyak 11 kali dari 18 kali percobaan. Percobaan tersebut dilakukan pada setiap track yang ada di setiap workshop dengan rel antar track yang terdapat di workshop. Sehingga error terjadi sebanyak 7 kali dari 18 percobaan, dimana bogie tidak berhenti di titik berhenti. Keadan terakhir pada tabel pengujian diatas yaitu System Stability, bahwa bogie telah berjalan stabil sesuai pada jalur dengan persentase sebanyak 67% dan 37% keluar jalur karena berbagai faktor.
Tabel 4 merupakan tabel pengujian akhir keseluruhan sistem, yaitu yang meliputi traverser dan bogie yang berjalan sesuai apa yang telah menjadi fungsinya. Pada tabel 4 diatas di jelaskan bahwa user telah memasukkan perintah ke bogie pada posisi awal berangkat bogie di posisi track pada salah satu workshop dan juga memasukkan posisi titik berhentinya bogie sebagai tujuan akhir
bogie. Pengujian ini di dalamnya terdapat tiga kondisi yang termasuk dalam sistem pengaturan yaitu sampai di titik tujuan yang merupakan penggolongan berhasil atau gagalnya sistem yang telah dibuat. Yang ke dua adanya penyebab kegagalan sistem dan yang terakhir ada Waktu yang menunjukkan rentang waktu ketika start dan finish ketika sistem berjalan.
Tabel 4 Pengujian Akhir keberhasilan Berjalannya Keseluruhan Sistem
Awal Tujuan Berhasil Gagal
1 A 1 Ya Tidak 6.04 Detik 2 A 2 Ya Tidak 9.03 Detik 3 A 3 Ya Tidak 11.12 Detik 4 B 1 Ya Tidak 8.58 Detik 5 B 2 Ya Tidak 6.08 Detik 6 B 3 Tidak Ya 8.89 Detik 7 C 1 Tidak Ya 11.07 Detik 8 C 2 Ya Tidak 8.47 Detik 9 C 3 Tidak Ya 6.07 Detik 10 1 A Tidak Ya 5.5 Detik 11 1 B Tidak Ya 8.73 Detik 12 1 C Ya Tidak 11.01 Detik 13 2 A Ya Tidak 8.56 Detik 14 2 B Ya Tidak 6.05 Detik 15 2 C Tidak Ya 10.23 Detik 16 3 A Tidak Ya 13.41 Detik 17 3 B Ya Tidak 9.13 Detik 18 3 C Ya Tidak 5.57 Detik Waktu (s) Keluar Jalur Sensor Tidak Mendeteksi Sensor Tidak Mendeteksi Sensor Tidak Mendeteksi
Keluar Jalur Keluar Jalur Keluar Jalur No. Posisi Sampai di Tujuan Penyebab Kegagalan
Dari pengujian tabel diatas dapat disimpulkan bahwa pada kondisi sistem traverser dan bogie telah berhasil sampai tujuan sebanyak 11 kali dengan persentase sebanyak 67% dengan rata-rata waktu 4.98 detik, dan gagal sampai tujuan sebanyak 7 kali mendapatkan persentase sebanyak 33% dengan waktu rata-rata error +3.55 detik. Kemudian adanya penyebab kegagalan yaitu adanya kondisi sensor tidak mendeteksi stopper dan terjadinya keluar jalur antara bogie maupun traverser.
SIMPULAN
Dalam pengujian dari hasil evaluasi menggunakan sensor Infrared Proximity E18-D80NK sebagai pendeteksi benda untuk ketepatan track pada Traverser dan Bogie sebagai pengantar barang antar track dapat berjalan sesuai dengan apa yang dirancang oleh penulis ada beberapa hal yang bisa disimpulkan sebagai berikut:
1. Sistem kontrol Traverser dan Temporary
Bogie dirancang dengan memperhatikan
desain terlebih dahulu kemudian menempatkan alat atau komponen
elektronika, aktuator, dan juga sensor yang semuanya berupa hardware. Setelah perakitan hardware selesai dilanjutkan dengan controller software yang kemudian dikontrol dengan microcontroller
menggunakan Arduino UNO sehingga alat yang dibuat dapat bekerja dan berjalan dengan sinkron.
2. Sistem pengoperasian Temporary Bogie dibuat dengan model HMI (Human
Machine Interface) yaitu sistem yang
menghubungkan antara manusia dan teknologi mesin. HMI dapat berupa pengendali dan visualisasi status, baik dengan manual maupun melalui visualisasi komputer yang bersifat realtime. Sistem HMI biasanya bekerja secara online dan real time dengan membaca data yang dikirimkan melalui I/O port yang digunakan oleh sistem controller-nya. Dengan menggunakan HMI model keypad maka operator sebagai user dapat menggunakan Temporary Bogie dan Traverser secara mudah. Bahkan ketika
sinkronisasi lewat komunikasi Nirkabel operator dapat menginputkan dan mengontrol lewat komputer serta dapat memonitoring pergerakan posisi keduanya. Dengan dilakukannya pengujian pada
traverser terdapat persentase keberhasilan
sebanyak 76.7% dan adapun persentase dengan nilai error sebanyak 35%. Kemudian pengujian untuk temporary
bogie mendapat persentase keberhasilan
sebesar 76.7% dengan persentase error ada pada persentase 23.3%.
SARAN
Untuk mengembangkan penelitian ini dari keseluruhan desain maupun sistem maka penulis memberikan saran sebagai berikut 1. Membuat desain 1:1 dari bentuk nyata yang
ada dilapangan sehingga memudahkan ketepatan dan realisme rencana program. 2. Menggunakan Aktuator seperti Motor DC
beserta Gearbox dangan torsi dan PWM yang tepat agar memudahkan setting ketepatan kelembaman Motor DC.
3. Memakai roda dengan bentuk 1:1 dengan bentuk desain roda kereta seperti bentuk aslinya.
4. Menggunakan as roda atau shaft yang kuat dan disesuaikan dengan ukuran bentuk desain Traverser maupun Bogie agar Motor DC tidak aus (loss direction).
5. Menggunakan sensor Proximity pendeteksi logam dengan merk ternama seperti Omron, Siemens, Festo dll.
DAFTAR PUSTAKA
Bintangtyo. (2014, 2 13). Pelajari tentang LCD 2X16 Character. (Online). (http://kl801.ilearning.me/2015/04/28/pel ajari-tentang-lcd-2x16-character-3/, diakses 4 Oktober 2016).
Ecadio. (2015, 5 23). Apakah Arduino itu?. (Online). ( http://ecadio.com/apakah-arduino-itu, diakses 2 Oktober 2016) PT INKA (Persero). (2014, 9 21). Mengenal
Istilah Bogie Pada Kereta Api. Diambil kembali dari PT INDUSTRI KERETA
API (PERSERO):
(http://www.inka.co.id/?p=2178, diakses 1 Oktober 2016).
Zuhal. (1988). Dasar Teknik Tenaga Listrik dan Elektronika Daya. Jakarta: Gramedia.